Рулевое управление гусеничной машины
Номер патента: U 2367
Опубликовано: 30.12.2005
Авторы: Равино Виктор Валерьевич, Жданович Чеслав Иосифович, Мамонов Михаил Иванович, Бойков Владимир Петрович
Текст
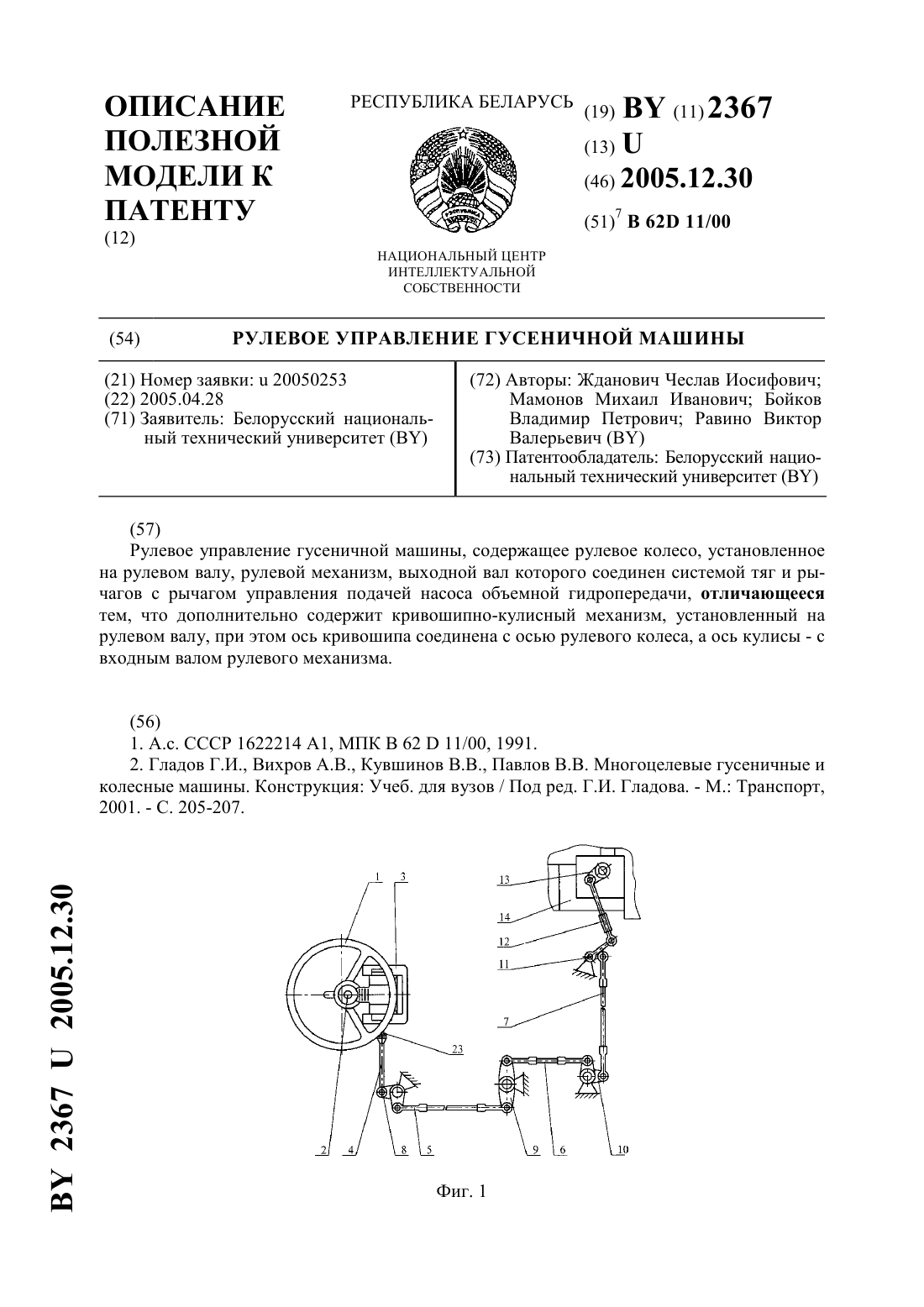
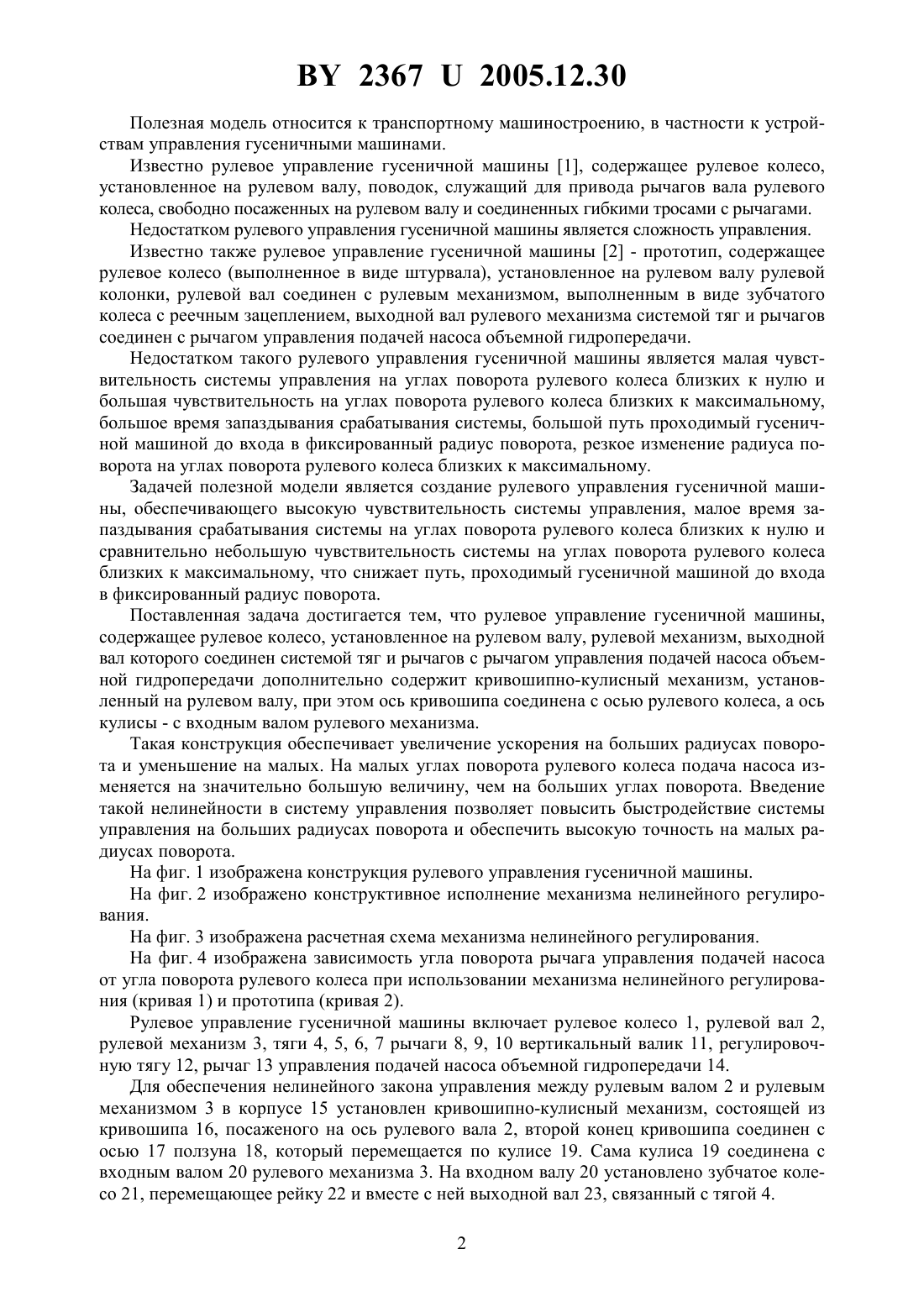
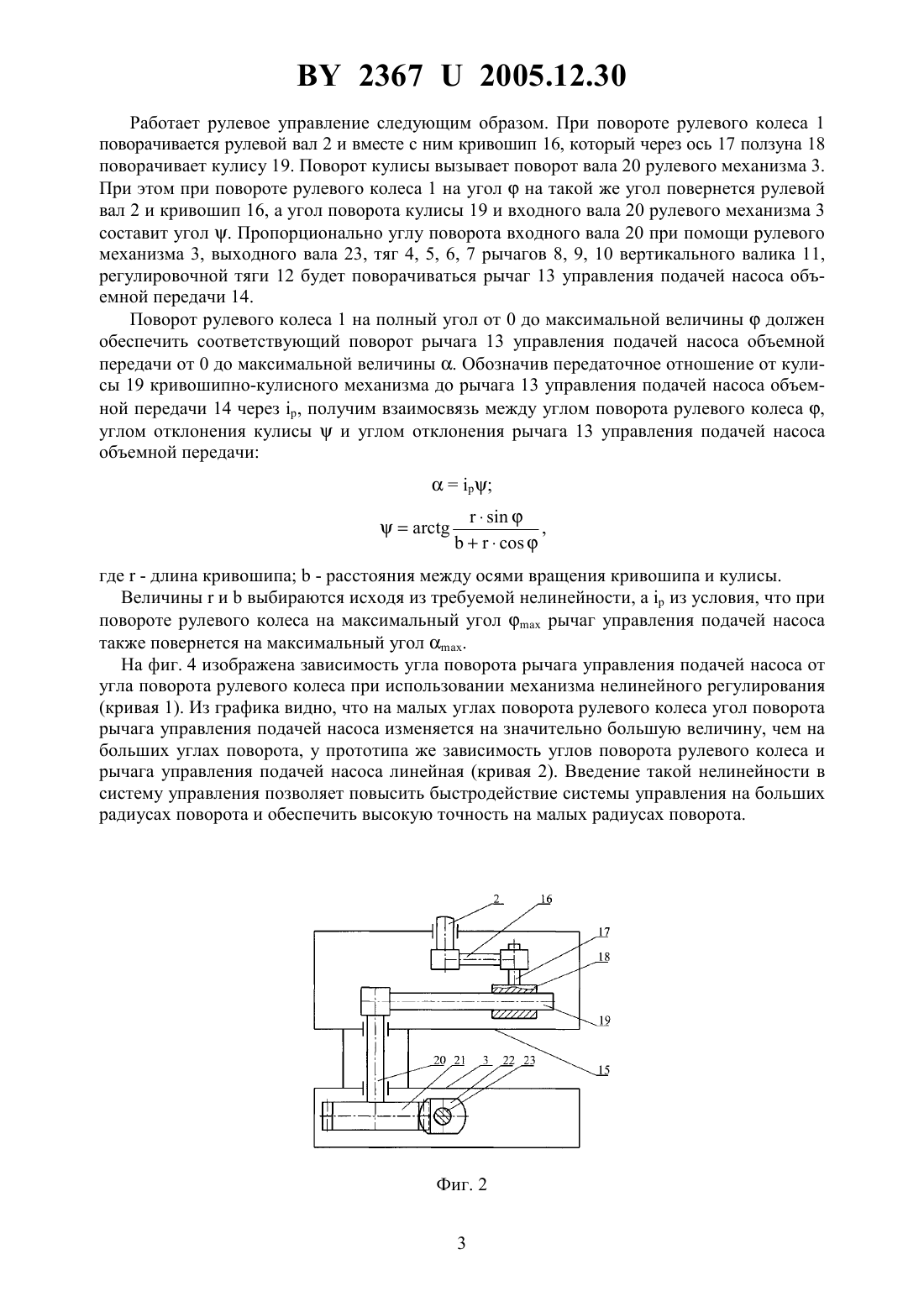
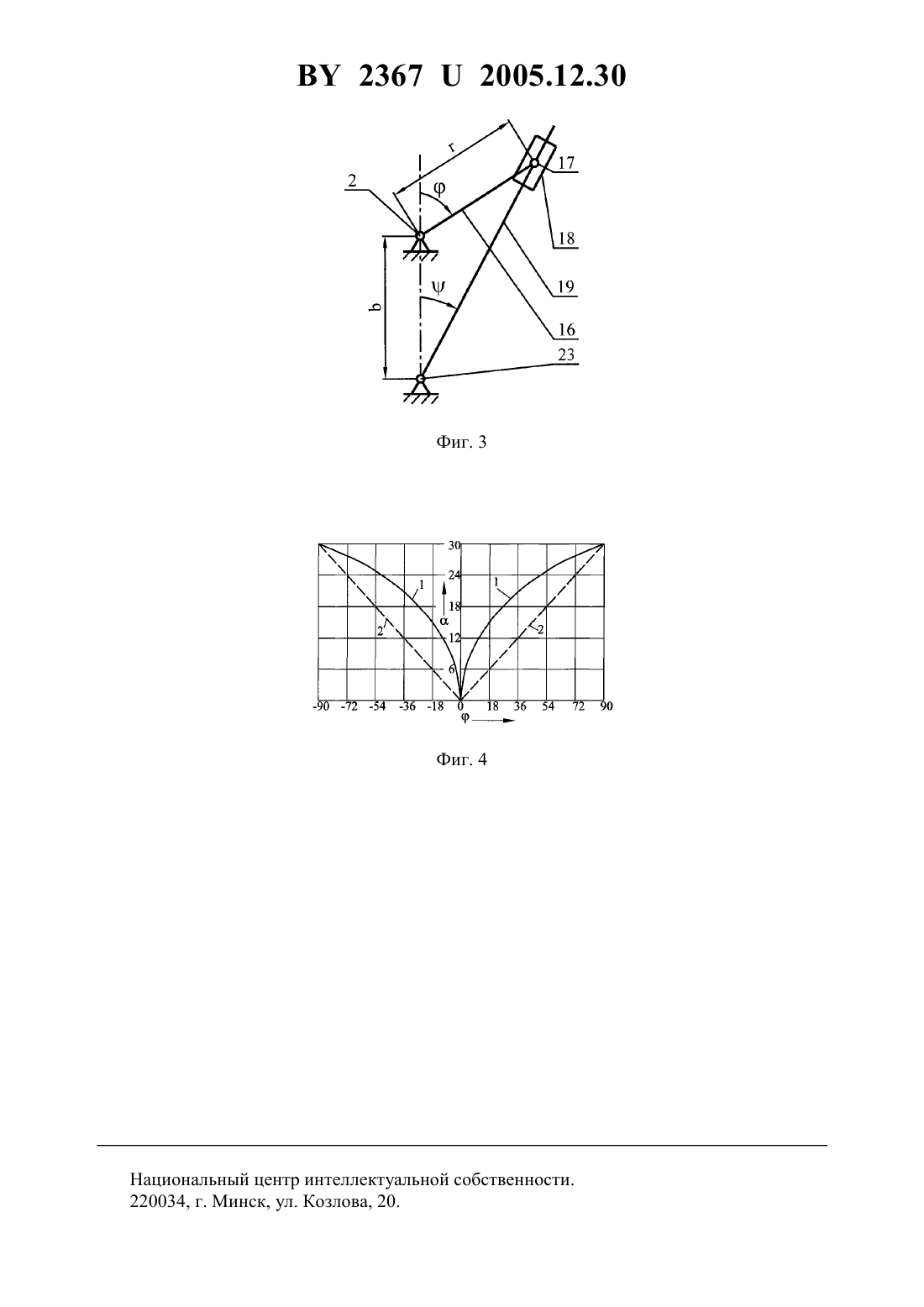
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ РУЛЕВОЕ УПРАВЛЕНИЕ ГУСЕНИЧНОЙ МАШИНЫ(71) Заявитель Белорусский национальный технический университет(72) Авторы Жданович Чеслав Иосифович Мамонов Михаил Иванович Бойков Владимир Петрович Равино Виктор Валерьевич(73) Патентообладатель Белорусский национальный технический университет(57) Рулевое управление гусеничной машины, содержащее рулевое колесо, установленное на рулевом валу, рулевой механизм, выходной вал которого соединен системой тяг и рычагов с рычагом управления подачей насоса объемной гидропередачи, отличающееся тем, что дополнительно содержит кривошипно-кулисный механизм, установленный на рулевом валу, при этом ось кривошипа соединена с осью рулевого колеса, а ось кулисы - с входным валом рулевого механизма. 23672005.12.30 Полезная модель относится к транспортному машиностроению, в частности к устройствам управления гусеничными машинами. Известно рулевое управление гусеничной машины 1, содержащее рулевое колесо,установленное на рулевом валу, поводок, служащий для привода рычагов вала рулевого колеса, свободно посаженных на рулевом валу и соединенных гибкими тросами с рычагами. Недостатком рулевого управления гусеничной машины является сложность управления. Известно также рулевое управление гусеничной машины 2 - прототип, содержащее рулевое колесо (выполненное в виде штурвала), установленное на рулевом валу рулевой колонки, рулевой вал соединен с рулевым механизмом, выполненным в виде зубчатого колеса с реечным зацеплением, выходной вал рулевого механизма системой тяг и рычагов соединен с рычагом управления подачей насоса объемной гидропередачи. Недостатком такого рулевого управления гусеничной машины является малая чувствительность системы управления на углах поворота рулевого колеса близких к нулю и большая чувствительность на углах поворота рулевого колеса близких к максимальному,большое время запаздывания срабатывания системы, большой путь проходимый гусеничной машиной до входа в фиксированный радиус поворота, резкое изменение радиуса поворота на углах поворота рулевого колеса близких к максимальному. Задачей полезной модели является создание рулевого управления гусеничной машины, обеспечивающего высокую чувствительность системы управления, малое время запаздывания срабатывания системы на углах поворота рулевого колеса близких к нулю и сравнительно небольшую чувствительность системы на углах поворота рулевого колеса близких к максимальному, что снижает путь, проходимый гусеничной машиной до входа в фиксированный радиус поворота. Поставленная задача достигается тем, что рулевое управление гусеничной машины,содержащее рулевое колесо, установленное на рулевом валу, рулевой механизм, выходной вал которого соединен системой тяг и рычагов с рычагом управления подачей насоса объемной гидропередачи дополнительно содержит кривошипно-кулисный механизм, установленный на рулевом валу, при этом ось кривошипа соединена с осью рулевого колеса, а ось кулисы - с входным валом рулевого механизма. Такая конструкция обеспечивает увеличение ускорения на больших радиусах поворота и уменьшение на малых. На малых углах поворота рулевого колеса подача насоса изменяется на значительно большую величину, чем на больших углах поворота. Введение такой нелинейности в систему управления позволяет повысить быстродействие системы управления на больших радиусах поворота и обеспечить высокую точность на малых радиусах поворота. На фиг. 1 изображена конструкция рулевого управления гусеничной машины. На фиг. 2 изображено конструктивное исполнение механизма нелинейного регулирования. На фиг. 3 изображена расчетная схема механизма нелинейного регулирования. На фиг. 4 изображена зависимость угла поворота рычага управления подачей насоса от угла поворота рулевого колеса при использовании механизма нелинейного регулирования (кривая 1) и прототипа (кривая 2). Рулевое управление гусеничной машины включает рулевое колесо 1, рулевой вал 2,рулевой механизм 3, тяги 4, 5, 6, 7 рычаги 8, 9, 10 вертикальный валик 11, регулировочную тягу 12, рычаг 13 управления подачей насоса объемной гидропередачи 14. Для обеспечения нелинейного закона управления между рулевым валом 2 и рулевым механизмом 3 в корпусе 15 установлен кривошипно-кулисный механизм, состоящей из кривошипа 16, посаженого на ось рулевого вала 2, второй конец кривошипа соединен с осью 17 ползуна 18, который перемещается по кулисе 19. Сама кулиса 19 соединена с входным валом 20 рулевого механизма 3. На входном валу 20 установлено зубчатое колесо 21, перемещающее рейку 22 и вместе с ней выходной вал 23, связанный с тягой 4. 2 23672005.12.30 Работает рулевое управление следующим образом. При повороте рулевого колеса 1 поворачивается рулевой вал 2 и вместе с ним кривошип 16, который через ось 17 ползуна 18 поворачивает кулису 19. Поворот кулисы вызывает поворот вала 20 рулевого механизма 3. При этом при повороте рулевого колеса 1 на уголна такой же угол повернется рулевой вал 2 и кривошип 16, а угол поворота кулисы 19 и входного вала 20 рулевого механизма 3 составит угол . Пропорционально углу поворота входного вала 20 при помощи рулевого механизма 3, выходного вала 23, тяг 4, 5, 6, 7 рычагов 8, 9, 10 вертикального валика 11,регулировочной тяги 12 будет поворачиваться рычаг 13 управления подачей насоса объемной передачи 14. Поворот рулевого колеса 1 на полный угол от 0 до максимальной величиныдолжен обеспечить соответствующий поворот рычага 13 управления подачей насоса объемной передачи от 0 до максимальной величины . Обозначив передаточное отношение от кулисы 19 кривошипно-кулисного механизма до рычага 13 управления подачей насоса объемной передачи 14 через , получим взаимосвязь между углом поворота рулевого колеса ,углом отклонения кулисыи углом отклонения рычага 13 управления подачей насоса объемной передачи где- длина кривошипа- расстояния между осями вращения кривошипа и кулисы. Величиныивыбираются исходя из требуемой нелинейности,из условия, что при повороте рулевого колеса на максимальный уголрычаг управления подачей насоса также повернется на максимальный угол . На фиг. 4 изображена зависимость угла поворота рычага управления подачей насоса от угла поворота рулевого колеса при использовании механизма нелинейного регулирования(кривая 1). Из графика видно, что на малых углах поворота рулевого колеса угол поворота рычага управления подачей насоса изменяется на значительно большую величину, чем на больших углах поворота, у прототипа же зависимость углов поворота рулевого колеса и рычага управления подачей насоса линейная (кривая 2). Введение такой нелинейности в систему управления позволяет повысить быстродействие системы управления на больших радиусах поворота и обеспечить высокую точность на малых радиусах поворота. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B62D 11/00
Метки: рулевое, машины, управление, гусеничной
Код ссылки
<a href="https://by.patents.su/4-u2367-rulevoe-upravlenie-gusenichnojj-mashiny.html" rel="bookmark" title="База патентов Беларуси">Рулевое управление гусеничной машины</a>
Система управления положением корпуса гусеничной машины
Номер патента: U 552
Опубликовано: 30.06.2002
Авторы: Котлобай Андрей Анатольевич, Котлобай Анатолий Яковлевич, Ковалев Ярослав Никитич
МПК: B60G 17/04
Метки: гусеничной, система, положением, машины, управления, корпуса
Текст:
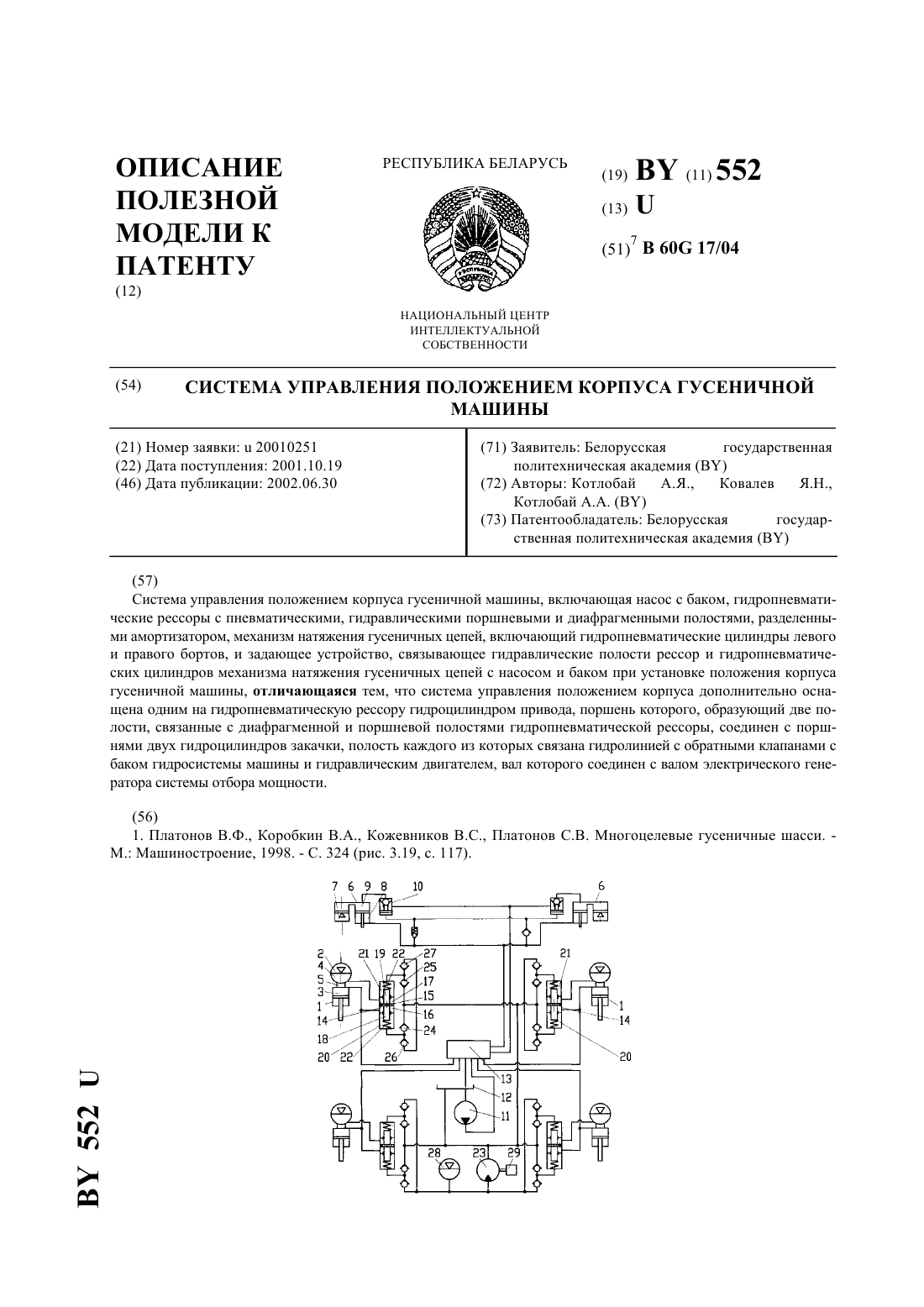
...цепей каждого борта система управления положением корпуса оснащена гидропневматическим механизмом натяжения, включающим один на борт гидропневматический цилиндр 6 с пневматической 7, гидравлической штоковой 8 и поршневой 9 полостями. Поршневые полости 9 заперты гидрозамками 10. Гидравлические полости 3, 4 гидропневматических рессор 1, 8 гидропневматического цилиндра 6, напорные полости гидрозамков 10 связаны с насосом 11 и баком 12...
Система управления положением корпуса гусеничной машины
Номер патента: U 467
Опубликовано: 30.03.2002
Авторы: Котлобай Анатолий Яковлевич, Котлобай Андрей Анатольевич
МПК: B60G 17/04
Метки: машины, гусеничной, корпуса, система, положением, управления
Текст:
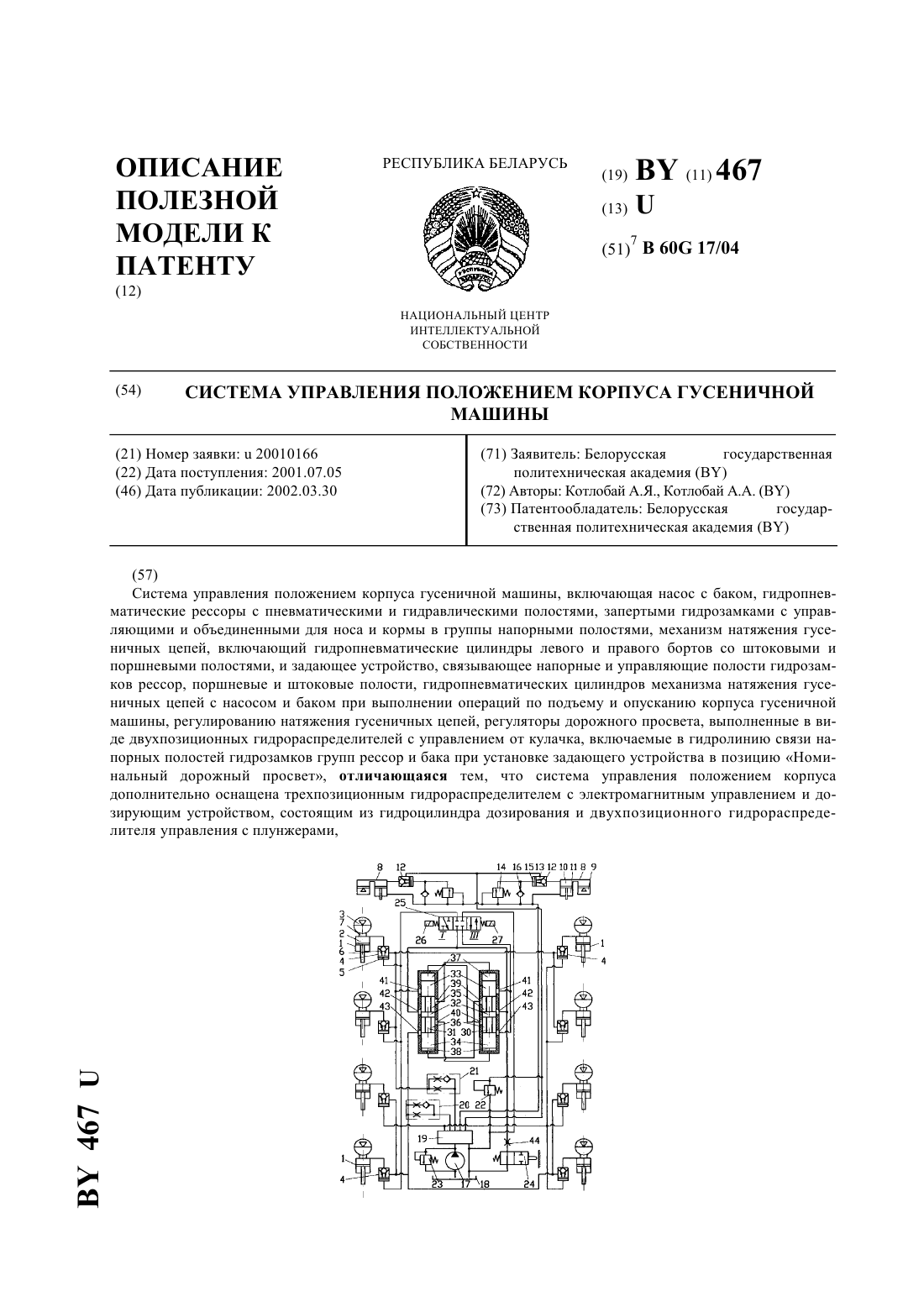
...дозирования объемов рабочей жидкости, закачиваемой в гидравлические полости 2 рессор 1, система управления положением корпуса гусеничной машины дополнительно оснащена трехпозиционным гидрораспределителем 25 с электромагнитным управлением посредством электромагнитов 26, 27 и дозирующим устройством, конструктивная схема которого позволяет работу в режимах сумматора и делителя потоков. Дозирующее устройство состоит из одинаковых по конструктивной...
Система управления положением корпуса гусеничной машины
Номер патента: U 551
Опубликовано: 30.06.2002
Авторы: Котлобай Анатолий Яковлевич, Котлобай Андрей Анатольевич
МПК: B60G 17/04
Метки: система, положением, гусеничной, корпуса, машины, управления
Текст:
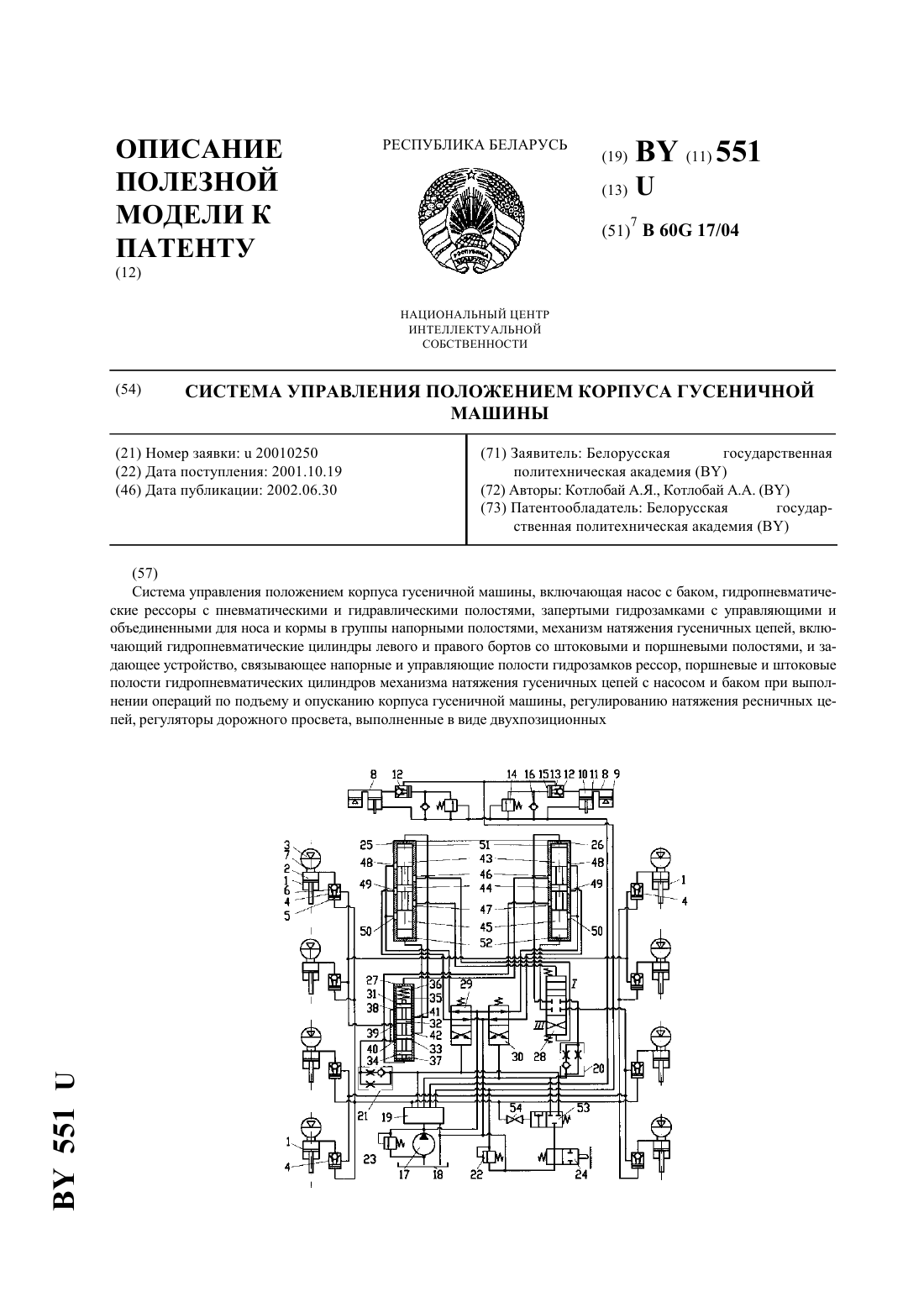
...к гидрозамкам 4 рессор 1 передней группы, открывает их и поступает в полости 2. После достижения плунжером гидроцилиндра дозирования 25 крайнего положения (на чертеже нижнего) жидкость от насоса 17 через двухпозиционный гидрораспределитель переключения 29 (во второй позиции его), каналы 49, 46 гидроцилиндра дозирования 25 поступает в торцевую управляющую полость (на чертеже нижнюю) гидрораспределителя управления 28. Вторая торцевая...
Система управления положением корпуса гусеничной машины
Номер патента: U 1165
Опубликовано: 30.12.2003
Авторы: Котлобай Анатолий Яковлевич, Котлобай Андрей Анатольевич, Бусел Алексей Владимирович
МПК: B60G 17/04
Метки: машины, управления, система, положением, гусеничной, корпуса
Текст:
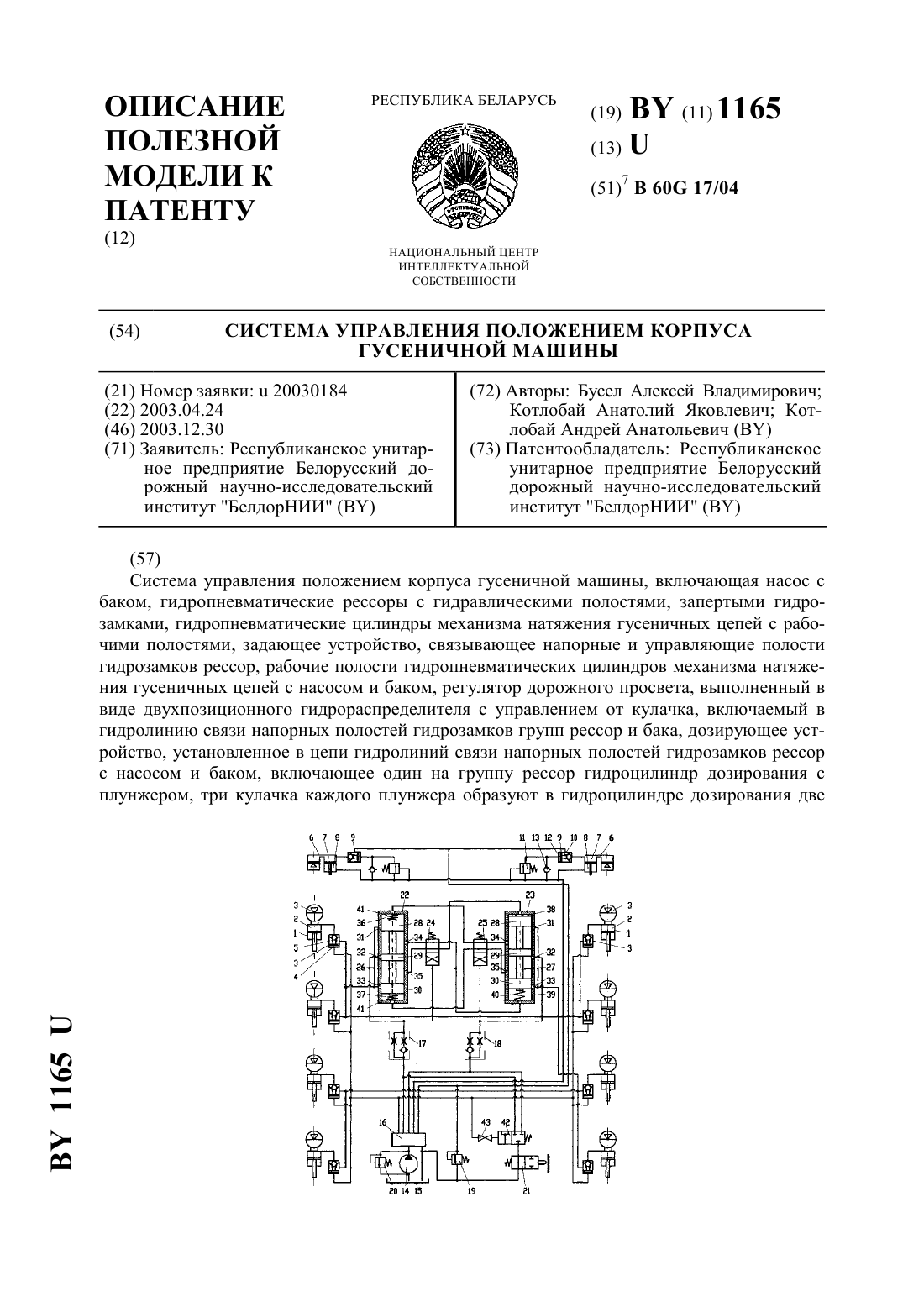
...рабочие полости 36, 37, 38, 39. В рабочей полости 39 гидроцилиндра дозирования 23 задней группы рессор 1 установлена пружина 40, обеспечивающая плунжеру 27 две позиции, у гидроцилиндра дозирования 22 передней группы рессор 1 пружина 41 установлена в каждой рабочей полости 36, 37, обеспечивая плунжеру 26 третью позицию. Пружины 40, 41 имеют незначительную жесткость и не оказывают заметного влияния на работу дозирующего устройства. Центральные...
Система управления положением корпуса гусеничной машины
Номер патента: U 468
Опубликовано: 30.03.2002
Авторы: Котлобай Андрей Анатольевич, Котлобай Анатолий Яковлевич
МПК: B60G 17/04
Метки: корпуса, система, гусеничной, положением, управления, машины
Текст:
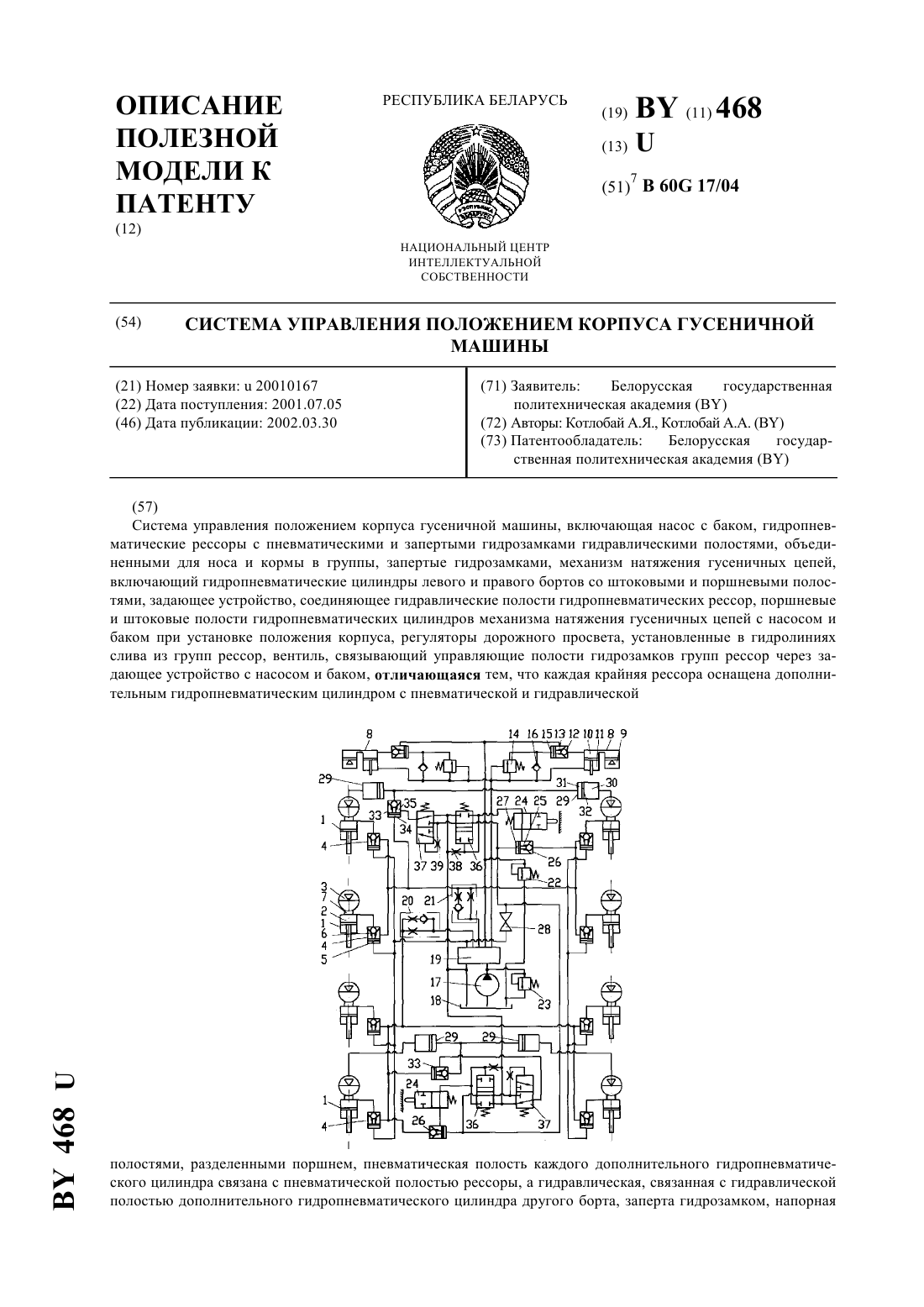
...предохранительные клапаны 14 связаны с управляющими полостями 15 гидрозамков 12. Параллельно предохранительным клапанам 14 установлены обратные клапаны 16, обеспечивающие слив жидкости из управляющих полостей 15 в штоковые полости 11 гидропневматических цилиндров 8. Для выполнения штатных операций по изменению положения корпуса гусеничной машины, установке его в положение Номинальный дорожный просвет, регулирования натяжения гусеничной цепи...
Предыдущий патент: Система для подогрева аккумуляторной батареи транспортного средства
Следующий патент: Автоматизированная система откорма свиней
Случайный патент: Портативное устройство для спасения людей на воде