Устройство для поддержания прямолинейности движения несимметрично присоединенного посредством задней навески к трактору плуга
Номер патента: U 3917
Опубликовано: 30.10.2007
Авторы: Захаров Александр Викторович, Горин Геннадий Степанович

Текст
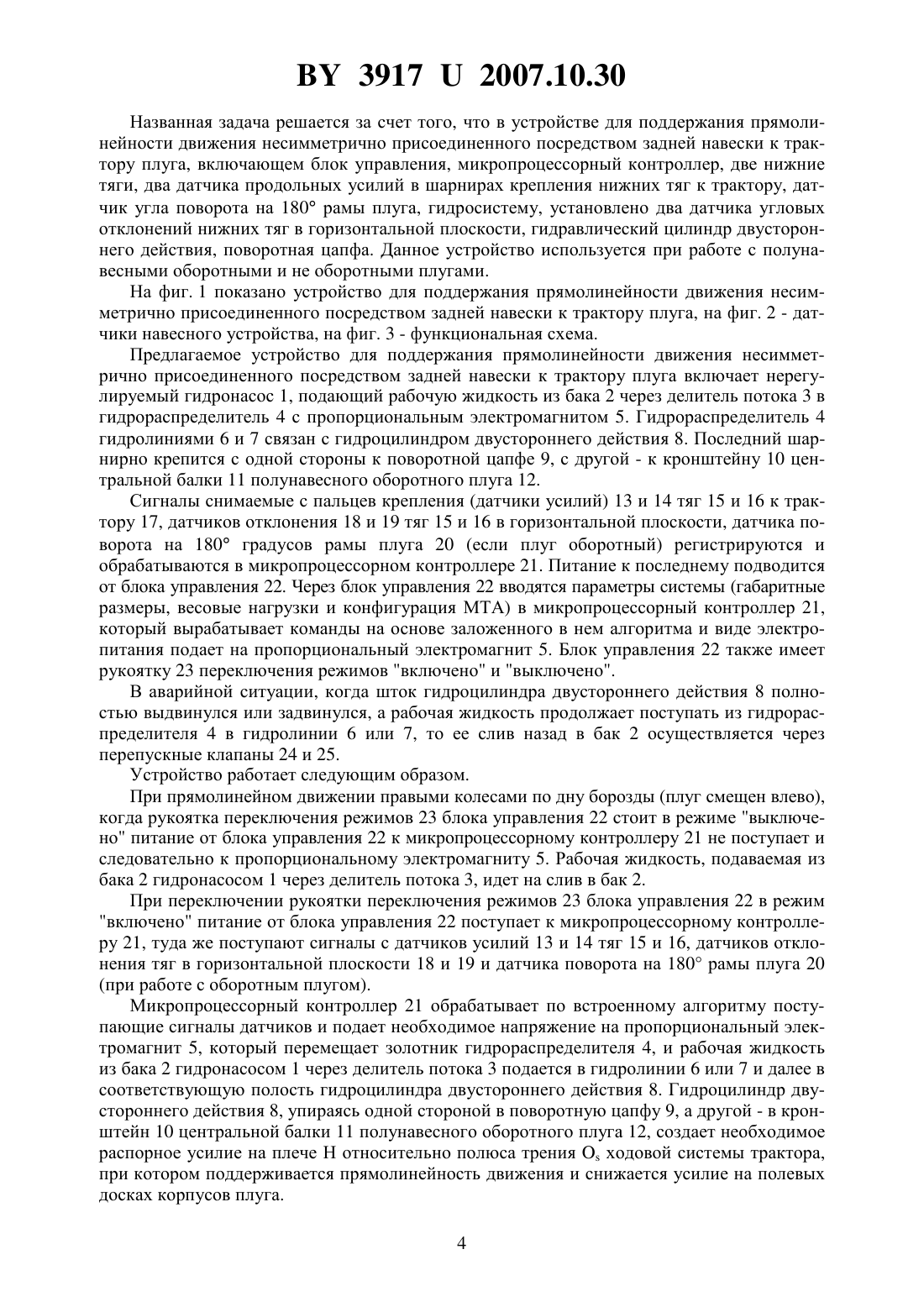
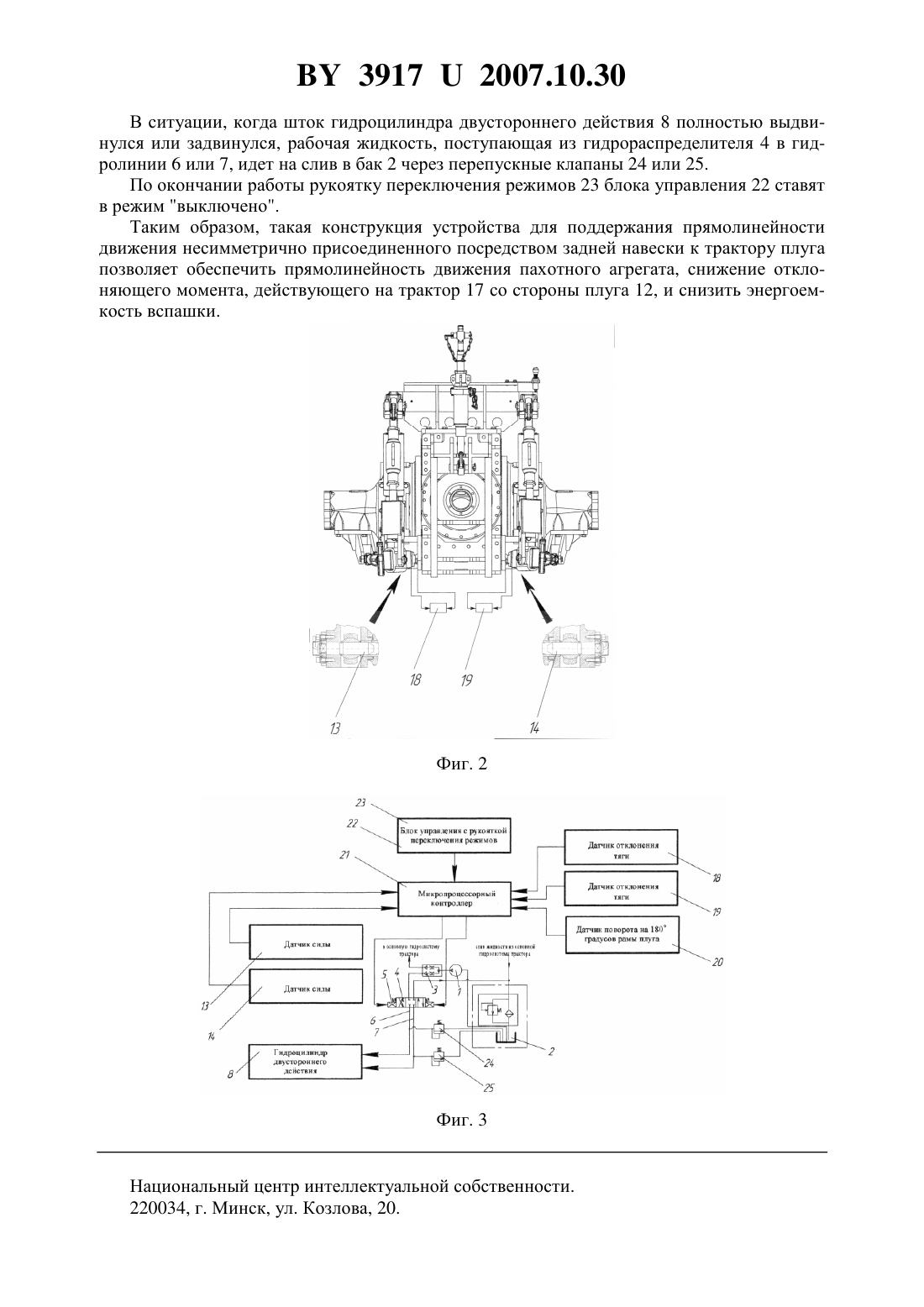
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ПРЯМОЛИНЕЙНОСТИ ДВИЖЕНИЯ НЕСИММЕТРИЧНО ПРИСОЕДИНЕННОГО ПОСРЕДСТВОМ ЗАДНЕЙ НАВЕСКИ К ТРАКТОРУ ПЛУГА(71) Заявитель Учреждение образования Белорусский государственный аграрный технический университет(72) Авторы Горин Геннадий Степанович Захаров Александр Викторович(73) Патентообладатель Учреждение образования Белорусский государственный аграрный технический университет(57) Устройство для поддержания прямолинейности движения несимметрично присоединенного посредством задней навески к трактору плуга, включающее блок управления,микропроцессорный контроллер, две нижние тяги, два датчика продольных усилий в шарнирах крепления нижних тяг к трактору, датчик угла поворота на 180 рамы плуга,гидросистему, отличающееся тем, что имеет два датчика угловых отклонений нижних тяг в горизонтальной плоскости, гидравлический цилиндр двустороннего действия и поворотную цапфу, с возможностью использования при работе с полунавесными оборотными и необоротными плугами.(56) 1. Левков В.Г., Бруенков И.Ф., Бомберов Э.А. Тракторы Беларус 1522/1522 В/1523/1523 В Руководство по эксплуатации. - ПО Минский тракторный завод 2001. - С. 187-189. 2. Статья. Пахать - // Новое сельское хозяйство. - 2006. -5. - . 64-67. 3. Патент США 6.698.524 В 2, МПК А 01 В 63/112, опубл. 02.03.2004. 4. Патент США 6.321.851 В 1, МПК А 01 В 59/04, опубл. 27.11.2001. 39172007.10.30 Предлагаемое техническое решение относится к области сельскохозяйственного машиностроения и предназначено для поддержания прямолинейности движения несимметрично присоединенного посредством задней навески к трактору плуга. Известны наиболее распространенные устройство и способ управления движением трактора с несимметричной тяговой нагрузкой, предотвращающий отклонение от прямолинейности курсового движения, заключающиеся в том, что правые колеса трактора пускают по дну борозды, образованной предыдущим проходом плуга, а левые колеса догружают грузами, с учетом перераспределения нормальной нагрузки на правый борт,вызванным перекосом в поперечно-вертикальной плоскости 1. Недостатки известных устройств и способа управления движением догрузка левых колес трактора не приемлема при работе с оборотными плугами (трактор движется по дну борозды поочередно то правым, то левым бортом) трудоемкость навешивания, так как масса грузов для догрузки борта тракторов тяжелых тяговых классов достигает 8501150 кг не полностью предотвращается отклонение от прямолинейности курсового движения,хотя при таком способе управления движением блокируют межколесные и межосевые дифференциалы. В результате этого в процессе движения происходят продольные сдвиги пятен контакта колес с почвой вокруг полюса трения, расположенного при движении правым бортом по дну борозды на расстоянии (эксцентриситете)от заднего правого колеса вправо, а при движении левым бортом по дну борозды - на расстоянии (эксцентриситете)от заднего левого колеса влево. Переход трактора на криволинейную траекторию движения с радиусом 2530 м вокруг некоторого смещенного назад центра скоростей, приводит к складыванию агрегата,продольному смещению шарнира крепления плуга назад и, как следствие, к бочению плуга - боковому смещению передних корпусов в сторону вспаханного поля. Известны также устройства, включающие электронные системы управления взаимодействием трактора с орудием в горизонтальной плоскости, позволяющие снизить сдвиговые деформации в контактах колес с почвой, а также в контактах плужных корпусов с почвой. Как следствие, уменьшаются паразитные силы и энергозатраты на почвообработку и перемещение пахотного МТА. Такие системы регулирования выполняются, как правило,мехатронными. Они включают измерительное устройство (датчики), микропроцессорный контроллер, где обрабатываются показания датчиков и вырабатываются команды на управление пропорциональным электромагнитом золотника гидрораспределителя и гидравлическим цилиндром или цилиндрами навесного устройства 2. Для выработки правильных команд используют математические модели и алгоритмы. Последние описывают последовательность действий по принятию решений на основе вводимых в память микропроцессорного контроллера параметров системы - габаритных размеров, весовых нагрузок и конфигурации МТА. Недостатки указанных систем регулирования большая сложность конструкции настройка системы требует специальных знаний и навыков большая стоимость. По своей технической сущности к предлагаемому устройству близко устройство для управления движением транспортного средства в соответствии с 3. Названное устройство включает треугольный присоединительный элемент, смонтированный на тракторе с помощью шести гидравлических цилиндров со встроенными шестью электромагнитными чувствительными элементами - датчиками - силовыми и длины, выполненными в соответствии с 4 кроме того, механизм сцепки включает механизм поворота рамы оборотного плуга на 180 вокруг продольной оси. Имеется также датчик угла поворота рамы плуга на 180 39172007.10.30 шарнирный присоединительный узел, включающий пару штанг, присоединенных, с одной стороны, к кронштейну, закрепленному на треугольном присоединительном элементе, а с другой стороны, на качающемся рычаге, закрепленном на одном конце вертикальной осью на раме плуга. На противоположном конце качающийся рычаг упирается в гидравлический цилиндр, предназначенный для регулирования ширины захвата плуга. Названные штанги поворачиваются блокирующим элементом (гидроцилиндр) в горизонтальной плоскости. Углы поворота штанг и вместе с тем рамы плуга замеряются с помощью двух датчиков, установленных на кронштейне, закрепленном на треугольном присоединительном элементе. Использование данной шарнирной системы позволяет разместить точку пересечения осей штанг на направлении результирующей силы тяги, что в свою очередь позволяет уменьшить сдвиговые деформации в контактах колес с почвой и плужных корпусов с почвой. На вход микропроцессорного контроллера подаются сигналы датчиков шести - силы и шести - длины, встроенных в шесть гидравлических цилиндровстяжек, соединяющие треугольный присоединительный элемент с корпусом трактора угла поворота рамы оборотного плуга на 180 двух угла поворота названных штанг крепления рамы плуга к треугольному присоединительному элементу. Недостатками известного устройства являются излишняя сложность измерительного устройства навесной системы, соединяющей треугольный присоединительный элемент с трактором (В электрогидравлических системах , используемых на современных тракторах Беларус, имеются три датчика два - силы, встроенных в шарниры крепления нижних тяг на тракторе и один - угла поворота верхней тяги, встроенный в шарнир крепления последней на тракторе. Остальные показатели взаимодействия рассчитывает микропроцессорный контроллер) устройство-прототип решает только задачу стабилизации движения орудия путем перемещения тяговой точки, которой является центр вращения штанг (ЦВШ), входящих в шарнирный присоединительный узел, соединяющий треугольный присоединительный элемент и качающийся рычаг. Размещая ЦВШ на направлении главного вектора сил тягового сопротивления орудия можно свести до нуля отклоняющий момент, действующий на шарнирную систему и тем самым предохранить орудие от сваливания влево или вправо по ходу движения, снижая тем самым сдвиговые деформации и энергетические потери на перемещение сельхозорудия. Однако, при движении с несимметричной тяговой нагрузкой, например, с правыми колесами, опущенными на дно борозды, открытой предыдущим проходом плуга, на корпус трактора и его ходовую систему действует отклоняющий момент относительно центра вращения, расположенного около колеса-лидера, на которое приходится наибольшая нормальная нагрузка. Под действием отклоняющего момента трактор переходит на криволинейную траекторию движения, что приводит к бочению плуга в соответствии с прототипом используется плуг специальной конструкции - навесной на виде в плане. Большинство плугов, которые агрегатируют с мощными тракторами - полунавесные оборотные. Навесные плуги с мощными тракторами обычно не агрегатируют. Одни из основных причин - из-за большой длины плуга при резком повороте руля и маневрировании в соединительных звеньях возникают перегрузки, плохое копирование поверхности поля. Задачей предлагаемой полезной модели является поддержание прямолинейности движения несимметрично присоединенного посредством задней навески к трактору плуга при движении по дну борозды, образованной предыдущим проходом плуга, снижение отклоняющего момента, действующего на трактор, и энергоемкости процесса вспашки, при одновременно большей простоте измерительного устройства, и использовании полунавесного оборотного плуга. 3 39172007.10.30 Названная задача решается за счет того, что в устройстве для поддержания прямолинейности движения несимметрично присоединенного посредством задней навески к трактору плуга, включающем блок управления, микропроцессорный контроллер, две нижние тяги, два датчика продольных усилий в шарнирах крепления нижних тяг к трактору, датчик угла поворота на 180 рамы плуга, гидросистему, установлено два датчика угловых отклонений нижних тяг в горизонтальной плоскости, гидравлический цилиндр двустороннего действия, поворотная цапфа. Данное устройство используется при работе с полунавесными оборотными и не оборотными плугами. На фиг. 1 показано устройство для поддержания прямолинейности движения несимметрично присоединенного посредством задней навески к трактору плуга, на фиг. 2 - датчики навесного устройства, на фиг. 3 - функциональная схема. Предлагаемое устройство для поддержания прямолинейности движения несимметрично присоединенного посредством задней навески к трактору плуга включает нерегулируемый гидронасос 1, подающий рабочую жидкость из бака 2 через делитель потока 3 в гидрораспределитель 4 с пропорциональным электромагнитом 5. Гидрораспределитель 4 гидролиниями 6 и 7 связан с гидроцилиндром двустороннего действия 8. Последний шарнирно крепится с одной стороны к поворотной цапфе 9, с другой - к кронштейну 10 центральной балки 11 полунавесного оборотного плуга 12. Сигналы снимаемые с пальцев крепления (датчики усилий) 13 и 14 тяг 15 и 16 к трактору 17, датчиков отклонения 18 и 19 тяг 15 и 16 в горизонтальной плоскости, датчика поворота на 180 градусов рамы плуга 20 (если плуг оборотный) регистрируются и обрабатываются в микропроцессорном контроллере 21. Питание к последнему подводится от блока управления 22. Через блок управления 22 вводятся параметры системы (габаритные размеры, весовые нагрузки и конфигурация МТА) в микропроцессорный контроллер 21,который вырабатывает команды на основе заложенного в нем алгоритма и виде электропитания подает на пропорциональный электромагнит 5. Блок управления 22 также имеет рукоятку 23 переключения режимов включено и выключено. В аварийной ситуации, когда шток гидроцилиндра двустороннего действия 8 полностью выдвинулся или задвинулся, а рабочая жидкость продолжает поступать из гидрораспределителя 4 в гидролинии 6 или 7, то ее слив назад в бак 2 осуществляется через перепускные клапаны 24 и 25. Устройство работает следующим образом. При прямолинейном движении правыми колесами по дну борозды (плуг смещен влево),когда рукоятка переключения режимов 23 блока управления 22 стоит в режиме выключено питание от блока управления 22 к микропроцессорному контроллеру 21 не поступает и следовательно к пропорциональному электромагниту 5. Рабочая жидкость, подаваемая из бака 2 гидронасосом 1 через делитель потока 3, идет на слив в бак 2. При переключении рукоятки переключения режимов 23 блока управления 22 в режим включено питание от блока управления 22 поступает к микропроцессорному контроллеру 21, туда же поступают сигналы с датчиков усилий 13 и 14 тяг 15 и 16, датчиков отклонения тяг в горизонтальной плоскости 18 и 19 и датчика поворота на 180 рамы плуга 20(при работе с оборотным плугом). Микропроцессорный контроллер 21 обрабатывает по встроенному алгоритму поступающие сигналы датчиков и подает необходимое напряжение на пропорциональный электромагнит 5, который перемещает золотник гидрораспределителя 4, и рабочая жидкость из бака 2 гидронасосом 1 через делитель потока 3 подается в гидролинии 6 или 7 и далее в соответствующую полость гидроцилиндра двустороннего действия 8. Гидроцилиндр двустороннего действия 8, упираясь одной стороной в поворотную цапфу 9, а другой - в кронштейн 10 центральной балки 11 полунавесного оборотного плуга 12, создает необходимое распорное усилие на плече Н относительно полюса тренияходовой системы трактора,при котором поддерживается прямолинейность движения и снижается усилие на полевых досках корпусов плуга. 4 39172007.10.30 В ситуации, когда шток гидроцилиндра двустороннего действия 8 полностью выдвинулся или задвинулся, рабочая жидкость, поступающая из гидрораспределителя 4 в гидролинии 6 или 7, идет на слив в бак 2 через перепускные клапаны 24 или 25. По окончании работы рукоятку переключения режимов 23 блока управления 22 ставят в режим выключено. Таким образом, такая конструкция устройства для поддержания прямолинейности движения несимметрично присоединенного посредством задней навески к трактору плуга позволяет обеспечить прямолинейность движения пахотного агрегата, снижение отклоняющего момента, действующего на трактор 17 со стороны плуга 12, и снизить энергоемкость вспашки. Фиг. 3 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
МПК: A01B 59/00
Метки: присоединенного, несимметрично, плуга, поддержания, посредством, устройство, навески, трактору, прямолинейности, движения, задней
Код ссылки
<a href="https://by.patents.su/5-u3917-ustrojjstvo-dlya-podderzhaniya-pryamolinejjnosti-dvizheniya-nesimmetrichno-prisoedinennogo-posredstvom-zadnejj-naveski-k-traktoru-pluga.html" rel="bookmark" title="База патентов Беларуси">Устройство для поддержания прямолинейности движения несимметрично присоединенного посредством задней навески к трактору плуга</a>
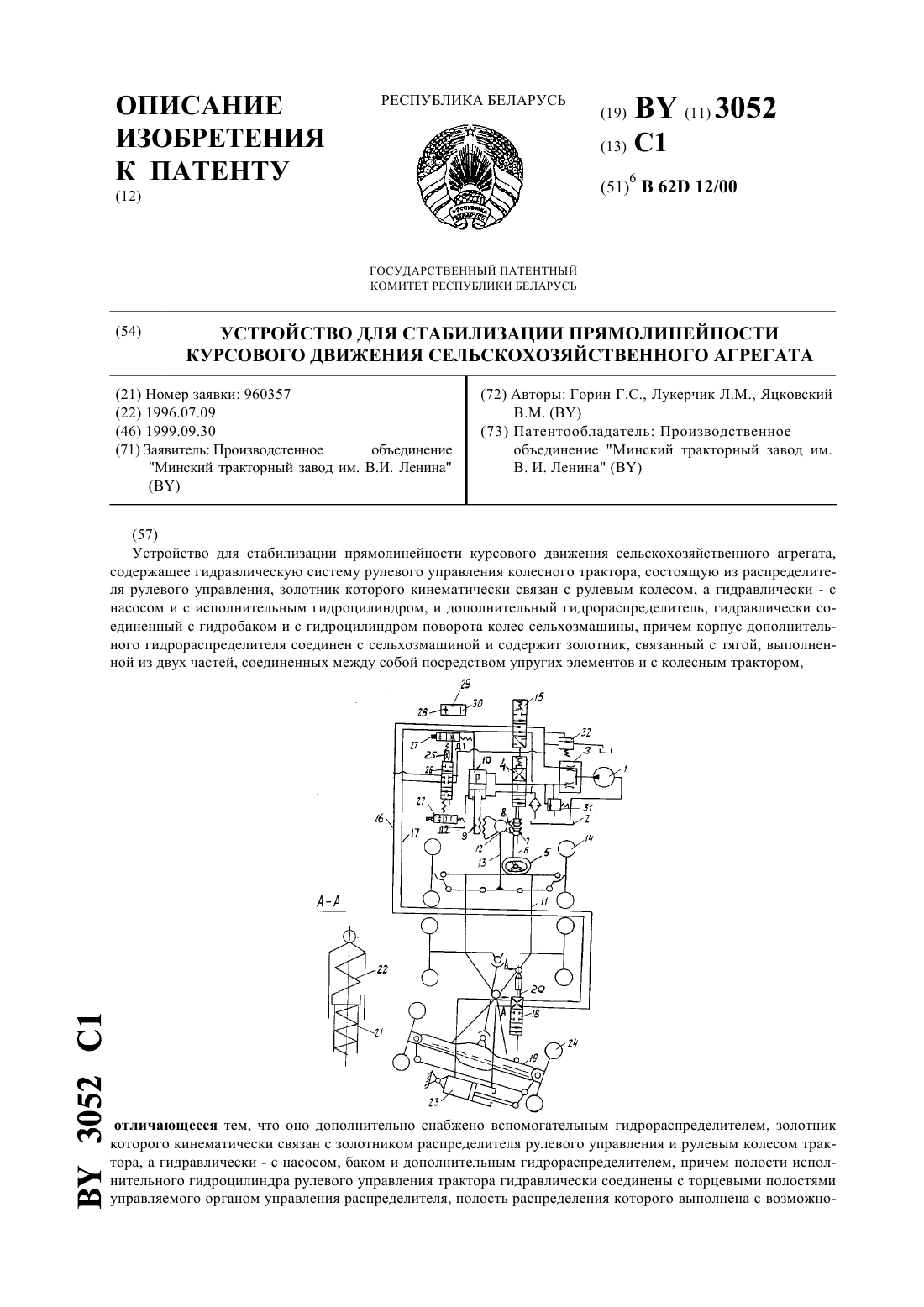
Устройство для стабилизации прямолинейности курсового движения сельскохозяйственного агрегата
Номер патента: 3052
Опубликовано: 30.09.1999
Авторы: Лукерчик Леонид Михайлович, Горин Геннадий Степанович, Яцковский Виктор Михайлович
МПК: B62D 12/00
Метки: стабилизации, движения, прямолинейности, курсового, сельскохозяйственного, агрегата, устройство
Текст:
...распределителя 4 рулевого управления трактора. Вспомогательный распределитель 15 гидролиниями 16 и 17 соединен с дополнительным гидрораспределителем 18, корпус которого шарнирно соединен с остовом сельхозмашины 19. Золотник дополнительного гидрораспределителя 18 встроен в тягу 20, состоящую из двух частей, соединенных между собой посредством упругих элементов 21 и 22, а с остовом трактора 11 и сельхозмашины 19 с помощью шарниров....
Устройство гидроходоуменьшителя к трактору

Номер патента: 4032
Опубликовано: 30.09.2001
Авторы: Костюков Александр Герасимович, Барковский Александр Александрович, Нелипович Владимир Петрович, Сацукевич Константин Павлович
МПК: B60K 17/10
Метки: гидроходоуменьшителя, устройство, трактору
Текст:
...гидромотор, редуктор, шестерню подключения гидроходоуменьшителя в коробке передач трактора, и снабжен муфтой включения, расположенной между гидромотором и упомянутой шестерней, установленной жестко на валу в коробке передач трактора, причем рычаг управления муфты включения кинематически связан с механизмом переключения понижающего редуктора с возможностью обеспечения при включенной муфте нейтрального положения последнего, а при...
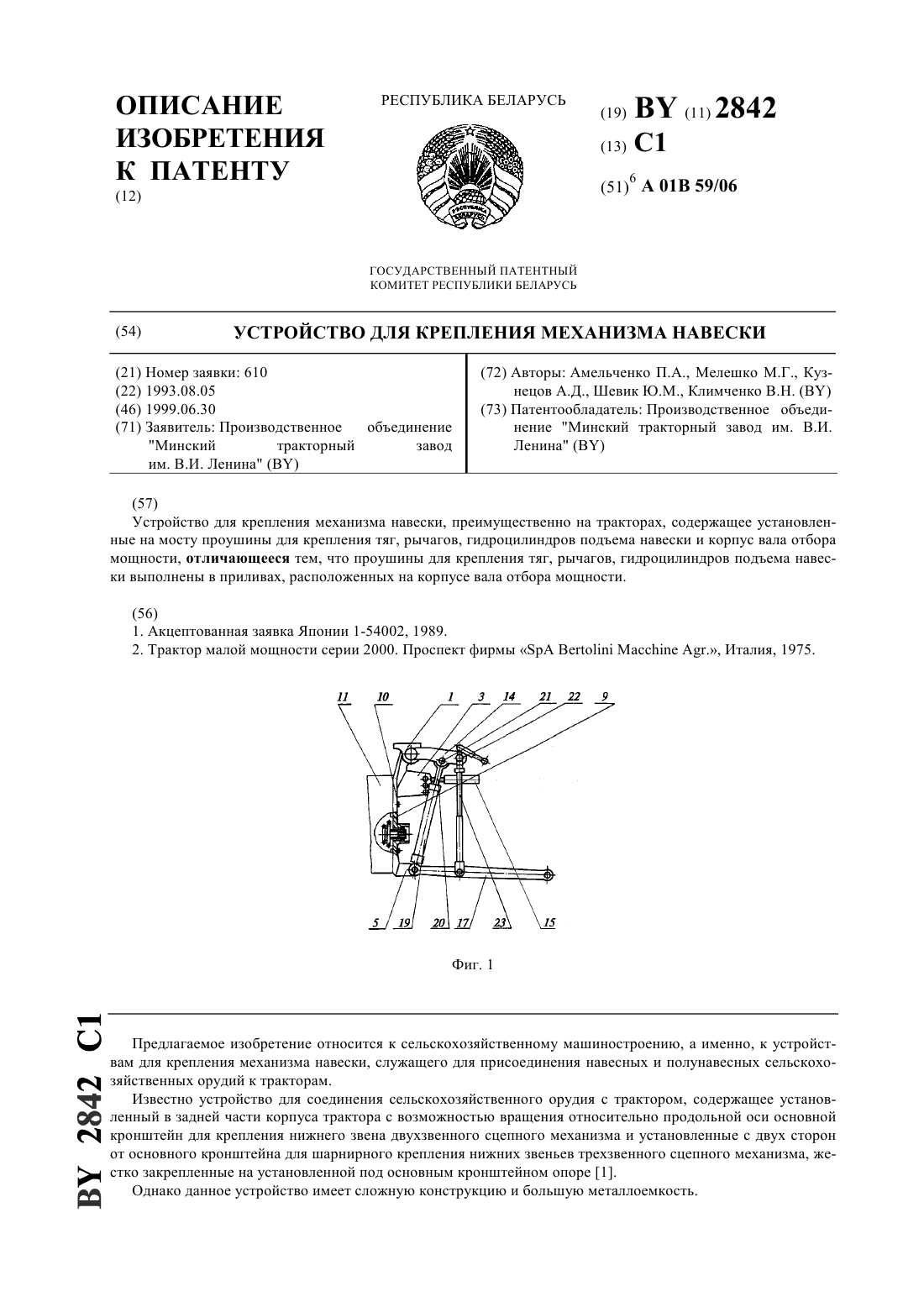
Устройство для крепления механизма навески
Номер патента: 2842
Опубликовано: 30.06.1999
Авторы: Мелешко Михаил Григорьевич, Кузнецов Антон Дмитриевич, КЛИМЧЕНКО Валерий Николаевич, Шевик Юрий Михайлович, Амельченко Петр Адамович
МПК: A01B 59/06
Метки: навески, механизма, крепления, устройство
Текст:
...содержащем установленные на мосту проушины для крепления тяг, рычагов, гидроцилиндров подъема навески и корпус вала отбора мощности, проушины для крепления тяг, рычагов, гидроцилиндров подъема навески выполнены в приливах, расположенных на корпусе вала отбора мощности. Сопоставительный анализ с прототипом показал, что заявляемое устройство для крепления механизма навески отличается тем, что проушины для крепления тяг, рычагов,...
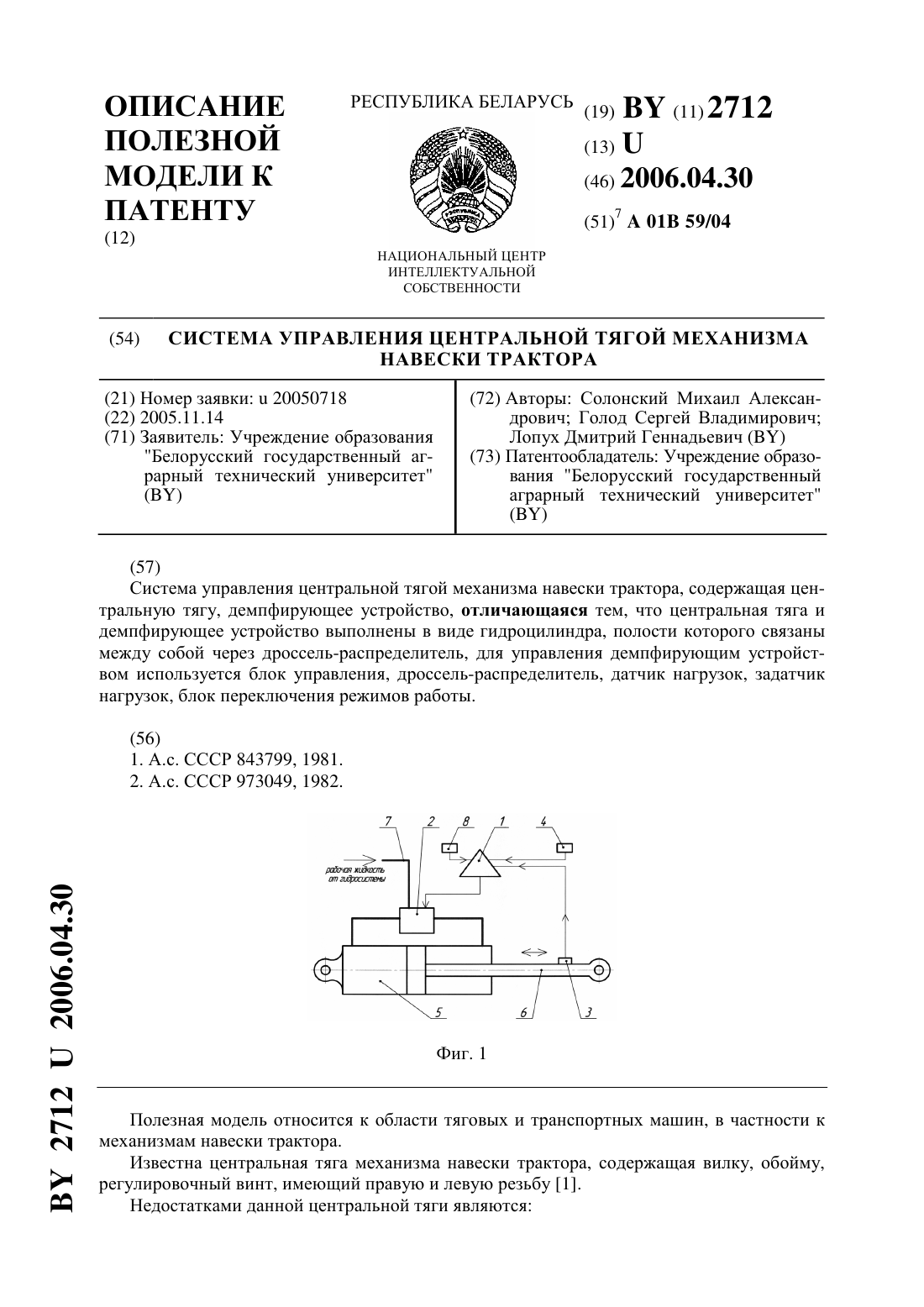
Система управления центральной тягой механизма навески трактора
Номер патента: U 2712
Опубликовано: 30.04.2006
Авторы: Солонский Михаил Александрович, Голод Сергей Владимирович, Лопух Дмитрий Геннадьевич
МПК: A01B 59/04
Метки: управления, центральной, механизма, тягой, система, трактора, навески
Текст:
...навески трактора, содержащая центральную тягу, демпфирующее устройство, где центральная тяга и демпфирующее устройство выполнены в виде гидроцилиндра, полости которого связаны между собой через дроссель-распределитель, для управления демпфирующим устройством используется блок управления, дроссель-распределитель, датчик нагрузок, задатчик нагрузок, блок переключения режимов работы. На фиг. 1 изображена принципиальная схема системы...
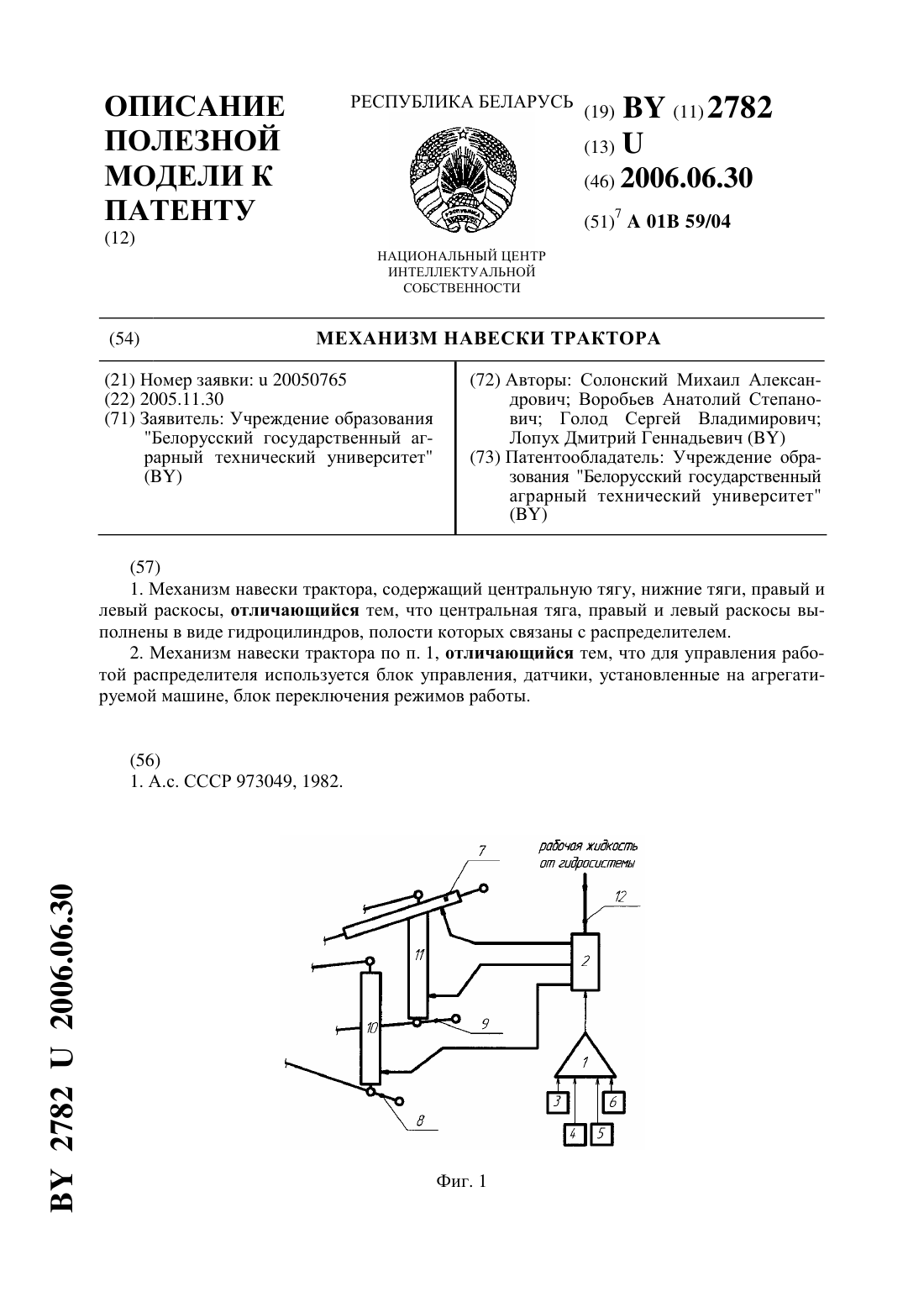
Механизм навески трактора
Номер патента: U 2782
Опубликовано: 30.06.2006
Авторы: Солонский Михаил Александрович, Лопух Дмитрий Геннадьевич, Голод Сергей Владимирович, Воробьев Анатолий Степанович
МПК: A01B 59/04
Метки: механизм, навески, трактора
Текст:
...используется блок управления, датчики, установленные на агрегатируемой машине, блок переключения режимов работы. На фиг. 1 изображена принципиальная схема механизма навески трактора. На фиг. 2 изображен алгоритм работы механизма навески трактора. Система управления центральной тягой механизма навески трактора включает в себя блок управления 1, распределитель 2, датчики 3, 4, 5, установленные на агрегатируемой машине, блок...
Предыдущий патент: Устройство для контактного внесения гербицидов
Следующий патент: Демпфирующий дренёр
Случайный патент: Комбайн для селективной выемки пластов полезного ископаемого с породным прослоем