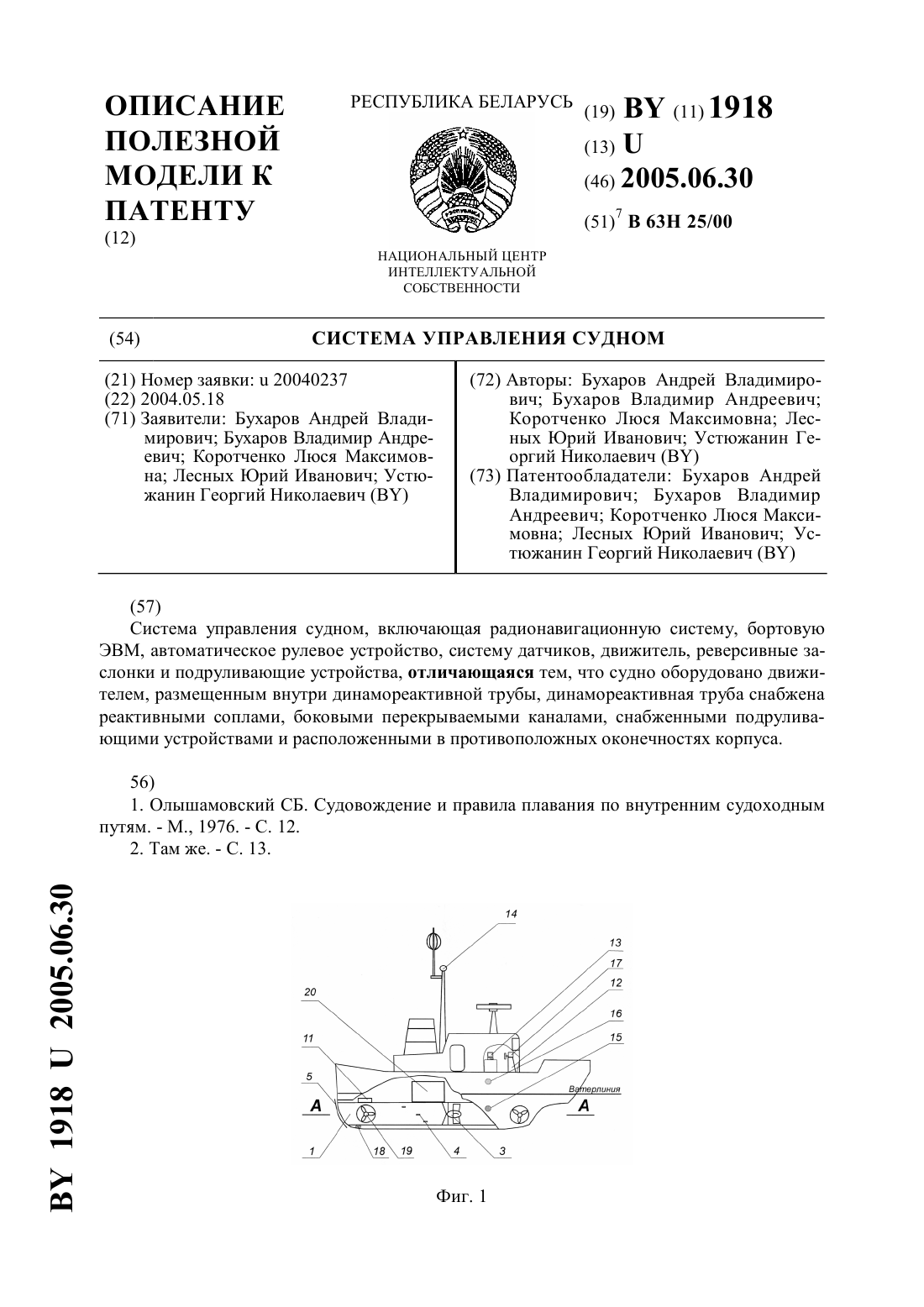
Система управления судном
Номер патента: U 1918
Опубликовано: 30.06.2005
Авторы: Устюжанин Георгий Николаевич, Коротченко Люся Максимовна, Лесных Юрий Иванович, Бухаров Андрей Владимирович, Бухаров Владимир Андреевич
Текст
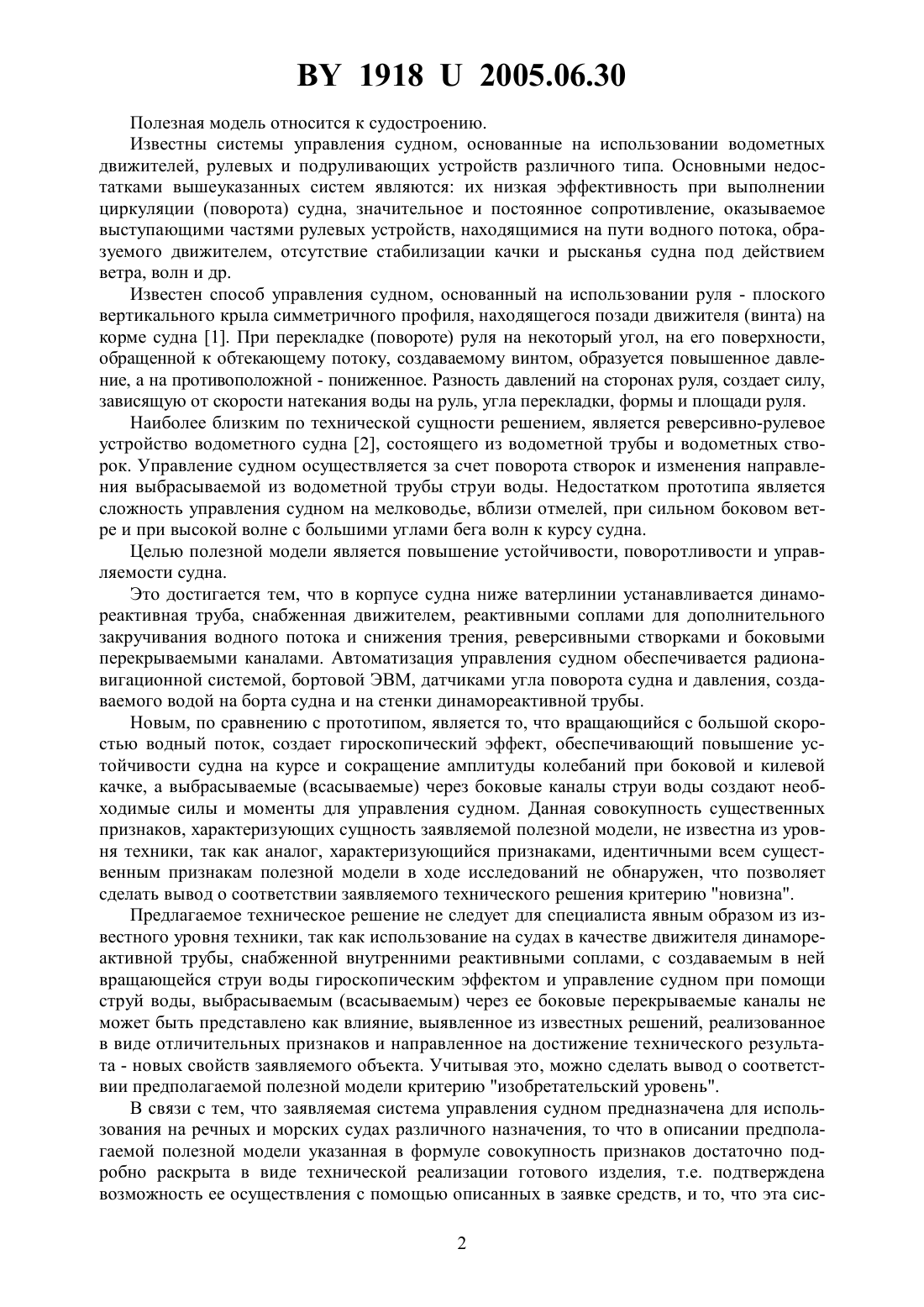
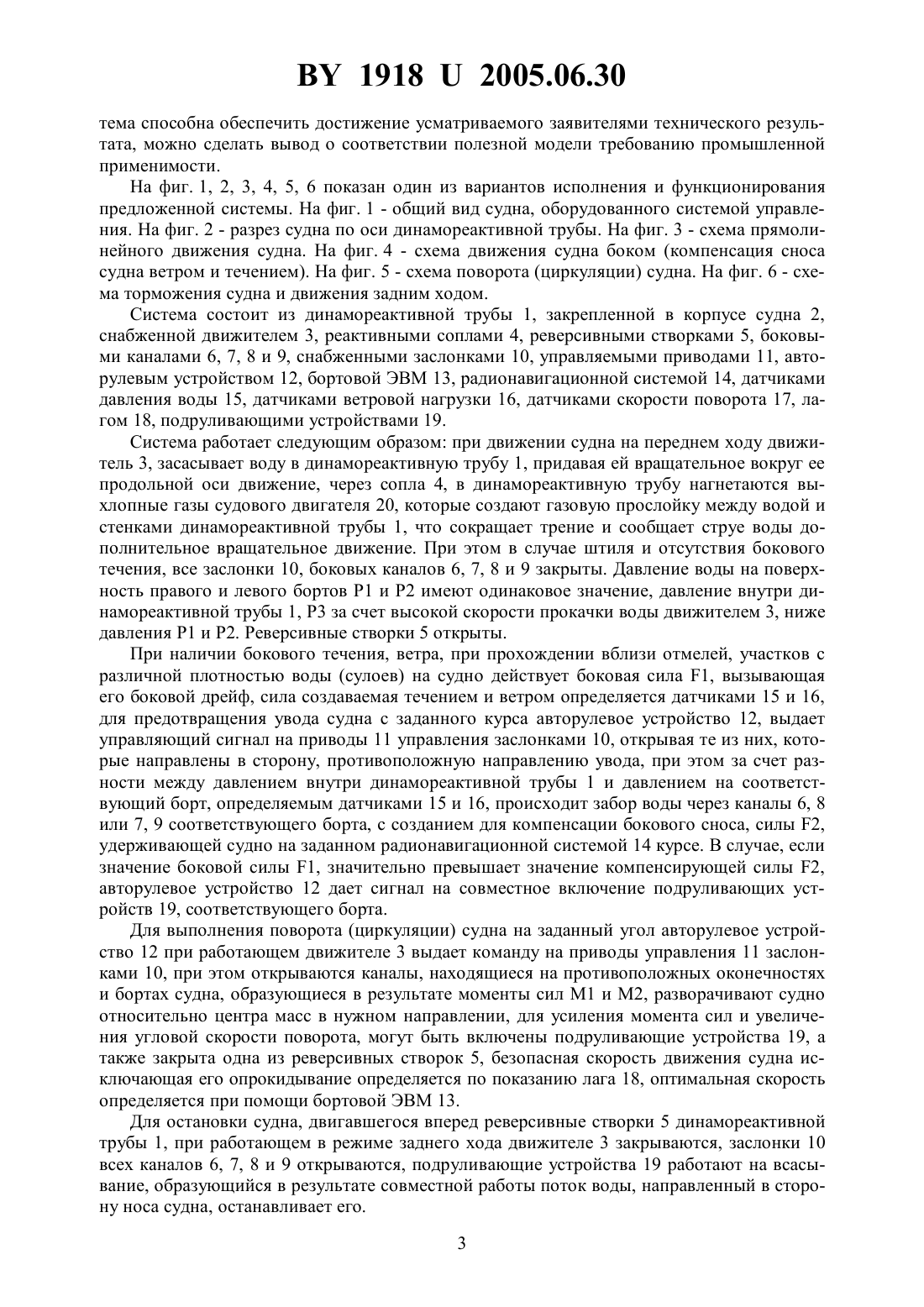
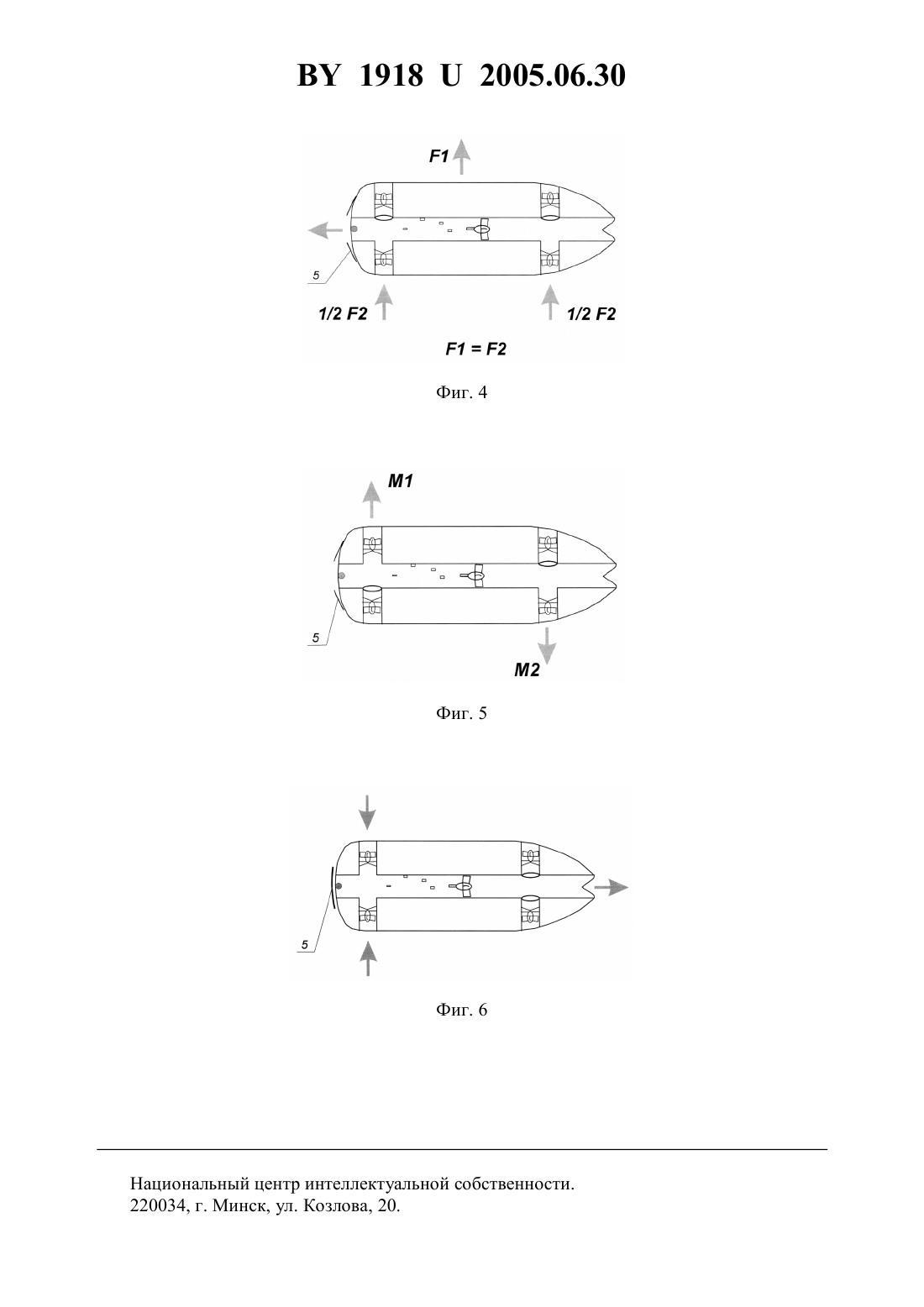
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявители Бухаров Андрей Владимирович Бухаров Владимир Андреевич Коротченко Люся Максимовна Лесных Юрий Иванович Устюжанин Георгий Николаевич(72) Авторы Бухаров Андрей Владимирович Бухаров Владимир Андреевич Коротченко Люся Максимовна Лесных Юрий Иванович Устюжанин Георгий Николаевич(73) Патентообладатели Бухаров Андрей Владимирович Бухаров Владимир Андреевич Коротченко Люся Максимовна Лесных Юрий Иванович Устюжанин Георгий Николаевич(57) Система управления судном, включающая радионавигационную систему, бортовую ЭВМ, автоматическое рулевое устройство, систему датчиков, движитель, реверсивные заслонки и подруливающие устройства, отличающаяся тем, что судно оборудовано движителем, размещенным внутри динамореактивной трубы, динамореактивная труба снабжена реактивными соплами, боковыми перекрываемыми каналами, снабженными подруливающими устройствами и расположенными в противоположных оконечностях корпуса. 56) 1. Олышамовский СБ. Судовождение и правила плавания по внутренним судоходным путям. - ., 1976. - С. 12. 2. Там же. - С. 13. 19182005.06.30 Полезная модель относится к судостроению. Известны системы управления судном, основанные на использовании водометных движителей, рулевых и подруливающих устройств различного типа. Основными недостатками вышеуказанных систем являются их низкая эффективность при выполнении циркуляции (поворота) судна, значительное и постоянное сопротивление, оказываемое выступающими частями рулевых устройств, находящимися на пути водного потока, образуемого движителем, отсутствие стабилизации качки и рысканья судна под действием ветра, волн и др. Известен способ управления судном, основанный на использовании руля - плоского вертикального крыла симметричного профиля, находящегося позади движителя (винта) на корме судна 1. При перекладке (повороте) руля на некоторый угол, на его поверхности,обращенной к обтекающему потоку, создаваемому винтом, образуется повышенное давление, а на противоположной - пониженное. Разность давлений на сторонах руля, создает силу,зависящую от скорости натекания воды на руль, угла перекладки, формы и площади руля. Наиболее близким по технической сущности решением, является реверсивно-рулевое устройство водометного судна 2, состоящего из водометной трубы и водометных створок. Управление судном осуществляется за счет поворота створок и изменения направления выбрасываемой из водометной трубы струи воды. Недостатком прототипа является сложность управления судном на мелководье, вблизи отмелей, при сильном боковом ветре и при высокой волне с большими углами бега волн к курсу судна. Целью полезной модели является повышение устойчивости, поворотливости и управляемости судна. Это достигается тем, что в корпусе судна ниже ватерлинии устанавливается динамореактивная труба, снабженная движителем, реактивными соплами для дополнительного закручивания водного потока и снижения трения, реверсивными створками и боковыми перекрываемыми каналами. Автоматизация управления судном обеспечивается радионавигационной системой, бортовой ЭВМ, датчиками угла поворота судна и давления, создаваемого водой на борта судна и на стенки динамореактивной трубы. Новым, по сравнению с прототипом, является то, что вращающийся с большой скоростью водный поток, создает гироскопический эффект, обеспечивающий повышение устойчивости судна на курсе и сокращение амплитуды колебаний при боковой и килевой качке, а выбрасываемые (всасываемые) через боковые каналы струи воды создают необходимые силы и моменты для управления судном. Данная совокупность существенных признаков, характеризующих сущность заявляемой полезной модели, не известна из уровня техники, так как аналог, характеризующийся признаками, идентичными всем существенным признакам полезной модели в ходе исследований не обнаружен, что позволяет сделать вывод о соответствии заявляемого технического решения критерию новизна. Предлагаемое техническое решение не следует для специалиста явным образом из известного уровня техники, так как использование на судах в качестве движителя динамореактивной трубы, снабженной внутренними реактивными соплами, с создаваемым в ней вращающейся струи воды гироскопическим эффектом и управление судном при помощи струй воды, выбрасываемым (всасываемым) через ее боковые перекрываемые каналы не может быть представлено как влияние, выявленное из известных решений, реализованное в виде отличительных признаков и направленное на достижение технического результата - новых свойств заявляемого объекта. Учитывая это, можно сделать вывод о соответствии предполагаемой полезной модели критерию изобретательский уровень. В связи с тем, что заявляемая система управления судном предназначена для использования на речных и морских судах различного назначения, то что в описании предполагаемой полезной модели указанная в формуле совокупность признаков достаточно подробно раскрыта в виде технической реализации готового изделия, т.е. подтверждена возможность ее осуществления с помощью описанных в заявке средств, и то, что эта сис 2 19182005.06.30 тема способна обеспечить достижение усматриваемого заявителями технического результата, можно сделать вывод о соответствии полезной модели требованию промышленной применимости. На фиг. 1, 2, 3, 4, 5, 6 показан один из вариантов исполнения и функционирования предложенной системы. На фиг. 1 - общий вид судна, оборудованного системой управления. На фиг. 2 - разрез судна по оси динамореактивной трубы. На фиг. 3 - схема прямолинейного движения судна. На фиг. 4 - схема движения судна боком (компенсация сноса судна ветром и течением). На фиг. 5 - схема поворота (циркуляции) судна. На фиг. 6 - схема торможения судна и движения задним ходом. Система состоит из динамореактивной трубы 1, закрепленной в корпусе судна 2,снабженной движителем 3, реактивными соплами 4, реверсивными створками 5, боковыми каналами 6, 7, 8 и 9, снабженными заслонками 10, управляемыми приводами 11, авторулевым устройством 12, бортовой ЭВМ 13, радионавигационной системой 14, датчиками давления воды 15, датчиками ветровой нагрузки 16, датчиками скорости поворота 17, лагом 18, подруливающими устройствами 19. Система работает следующим образом при движении судна на переднем ходу движитель 3, засасывает воду в динамореактивную трубу 1, придавая ей вращательное вокруг ее продольной оси движение, через сопла 4, в динамореактивную трубу нагнетаются выхлопные газы судового двигателя 20, которые создают газовую прослойку между водой и стенками динамореактивной трубы 1, что сокращает трение и сообщает струе воды дополнительное вращательное движение. При этом в случае штиля и отсутствия бокового течения, все заслонки 10, боковых каналов 6, 7, 8 и 9 закрыты. Давление воды на поверхность правого и левого бортов 1 и Р 2 имеют одинаковое значение, давление внутри динамореактивной трубы 1, Р 3 за счет высокой скорости прокачки воды движителем 3, ниже давления 1 и Р 2. Реверсивные створки 5 открыты. При наличии бокового течения, ветра, при прохождении вблизи отмелей, участков с различной плотностью воды (сулоев) на судно действует боковая сила 1, вызывающая его боковой дрейф, сила создаваемая течением и ветром определяется датчиками 15 и 16,для предотвращения увода судна с заданного курса авторулевое устройство 12, выдает управляющий сигнал на приводы 11 управления заслонками 10, открывая те из них, которые направлены в сторону, противоположную направлению увода, при этом за счет разности между давлением внутри динамореактивной трубы 1 и давлением на соответствующий борт, определяемым датчиками 15 и 16, происходит забор воды через каналы 6, 8 или 7, 9 соответствующего борта, с созданием для компенсации бокового сноса, силы 2,удерживающей судно на заданном радионавигационной системой 14 курсе. В случае, если значение боковой силы 1, значительно превышает значение компенсирующей силы 2,авторулевое устройство 12 дает сигнал на совместное включение подруливающих устройств 19, соответствующего борта. Для выполнения поворота (циркуляции) судна на заданный угол авторулевое устройство 12 при работающем движителе 3 выдает команду на приводы управления 11 заслонками 10, при этом открываются каналы, находящиеся на противоположных оконечностях и бортах судна, образующиеся в результате моменты сил 1 и М 2, разворачивают судно относительно центра масс в нужном направлении, для усиления момента сил и увеличения угловой скорости поворота, могут быть включены подруливающие устройства 19, а также закрыта одна из реверсивных створок 5, безопасная скорость движения судна исключающая его опрокидывание определяется по показанию лага 18, оптимальная скорость определяется при помощи бортовой ЭВМ 13. Для остановки судна, двигавшегося вперед реверсивные створки 5 динамореактивной трубы 1, при работающем в режиме заднего хода движителе 3 закрываются, заслонки 10 всех каналов 6, 7, 8 и 9 открываются, подруливающие устройства 19 работают на всасывание, образующийся в результате совместной работы поток воды, направленный в сторону носа судна, останавливает его. 3 19182005.06.30 Для движения судна задним ходом движитель 3, работая в режиме заднего хода при закрытых реверсивных створках 5, всасывает воду через каналы 6, 7, 8 и 9 и выбрасывает ее через носовой срез динамореактивной трубы 1, для увеличения скорости движения судна могут быть включены на всасывание подруливающие устройства 19. Для торможения судна двигавшегося задним ходом открываются реверсивные заслонки 5, а движитель 3 переводится на движение вперед (перекачку воды с носа судна к корме). Для движения судна боком, например при его привале (причаливании), подруливающие устройства 19 включаются таким образом, чтобы каналы 6 и 8, обращенные к причалу 21 работали на всасывание, а каналы 7 и 9, обращенные в противоположную сторону работали на выброс воды, реверсивные створки 5 остаются открытыми, движитель 3 остановлен. Возможно также боковое движение судна за счет работы движителя 3 вперед при закрытых реверсивных створках 5 и открытых каналах 6 и 8 или 7 и 9, соответствующих заданному направлению движения судна. Для торможения судна двигавшегося боком при помощи подруливающих устройств 19 меняют направление движения воды в каналах 6, 7, 8 и 9 на противоположное. Для торможения судна, двигавшегося боком при помощи движителя 3, при закрытых реверсивных заслонках 5, не открывая их, открывают те из каналов 6, 7, 8 и 9, которые обеспечивают соответствующий направлению движения судна выброс воды. Технологичность и простота конструкции позволяют достаточно быстро освоить выпуск данной системы в промышленных условиях и ее широкое использование для установки на суда торгового флота, плавсредства спасательных служб и боевые корабли военно-морского флота. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B63H 25/00
Метки: система, судном, управления
Код ссылки
<a href="https://by.patents.su/5-u1918-sistema-upravleniya-sudnom.html" rel="bookmark" title="База патентов Беларуси">Система управления судном</a>
Система управления положением корпуса гусеничной машины
Номер патента: U 551
Опубликовано: 30.06.2002
Авторы: Котлобай Анатолий Яковлевич, Котлобай Андрей Анатольевич
МПК: B60G 17/04
Метки: управления, гусеничной, корпуса, машины, положением, система
Текст:
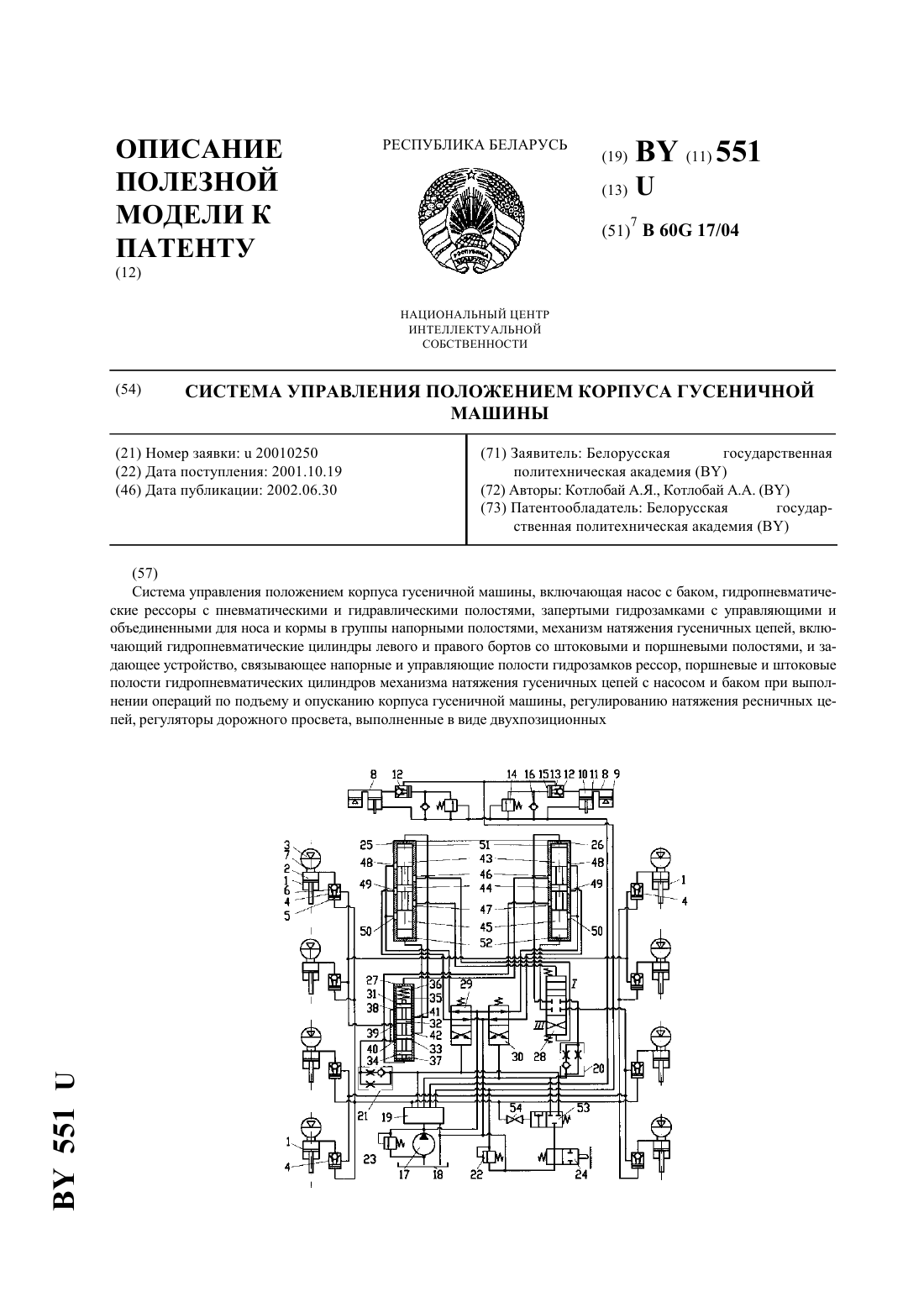
...к гидрозамкам 4 рессор 1 передней группы, открывает их и поступает в полости 2. После достижения плунжером гидроцилиндра дозирования 25 крайнего положения (на чертеже нижнего) жидкость от насоса 17 через двухпозиционный гидрораспределитель переключения 29 (во второй позиции его), каналы 49, 46 гидроцилиндра дозирования 25 поступает в торцевую управляющую полость (на чертеже нижнюю) гидрораспределителя управления 28. Вторая торцевая...
Система управления положением корпуса гусеничной машины
Номер патента: U 1165
Опубликовано: 30.12.2003
Авторы: Бусел Алексей Владимирович, Котлобай Андрей Анатольевич, Котлобай Анатолий Яковлевич
МПК: B60G 17/04
Метки: гусеничной, система, положением, машины, управления, корпуса
Текст:
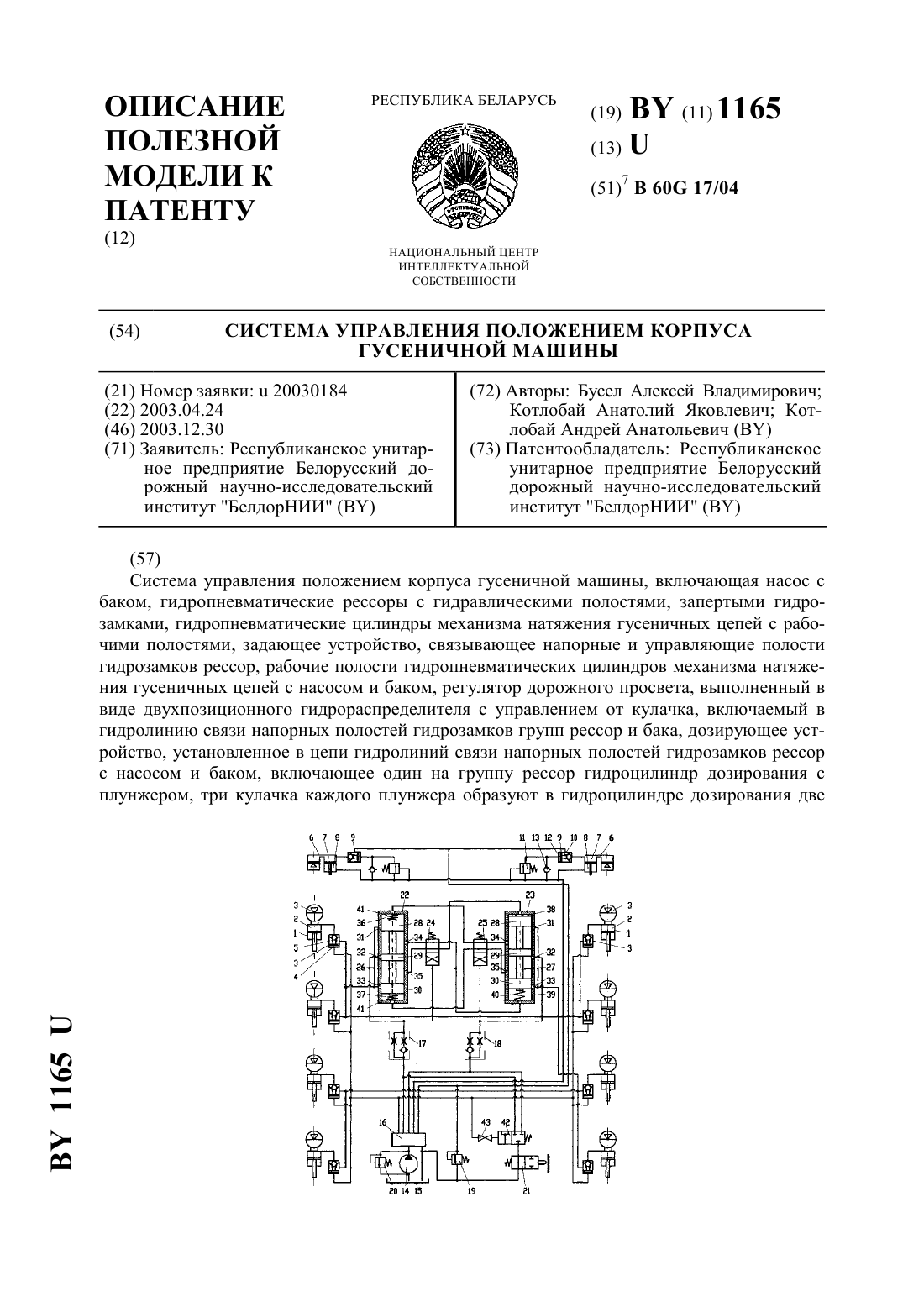
...рабочие полости 36, 37, 38, 39. В рабочей полости 39 гидроцилиндра дозирования 23 задней группы рессор 1 установлена пружина 40, обеспечивающая плунжеру 27 две позиции, у гидроцилиндра дозирования 22 передней группы рессор 1 пружина 41 установлена в каждой рабочей полости 36, 37, обеспечивая плунжеру 26 третью позицию. Пружины 40, 41 имеют незначительную жесткость и не оказывают заметного влияния на работу дозирующего устройства. Центральные...
Система управления положением корпуса гусеничной машины
Номер патента: U 467
Опубликовано: 30.03.2002
Авторы: Котлобай Андрей Анатольевич, Котлобай Анатолий Яковлевич
МПК: B60G 17/04
Метки: положением, гусеничной, машины, корпуса, система, управления
Текст:
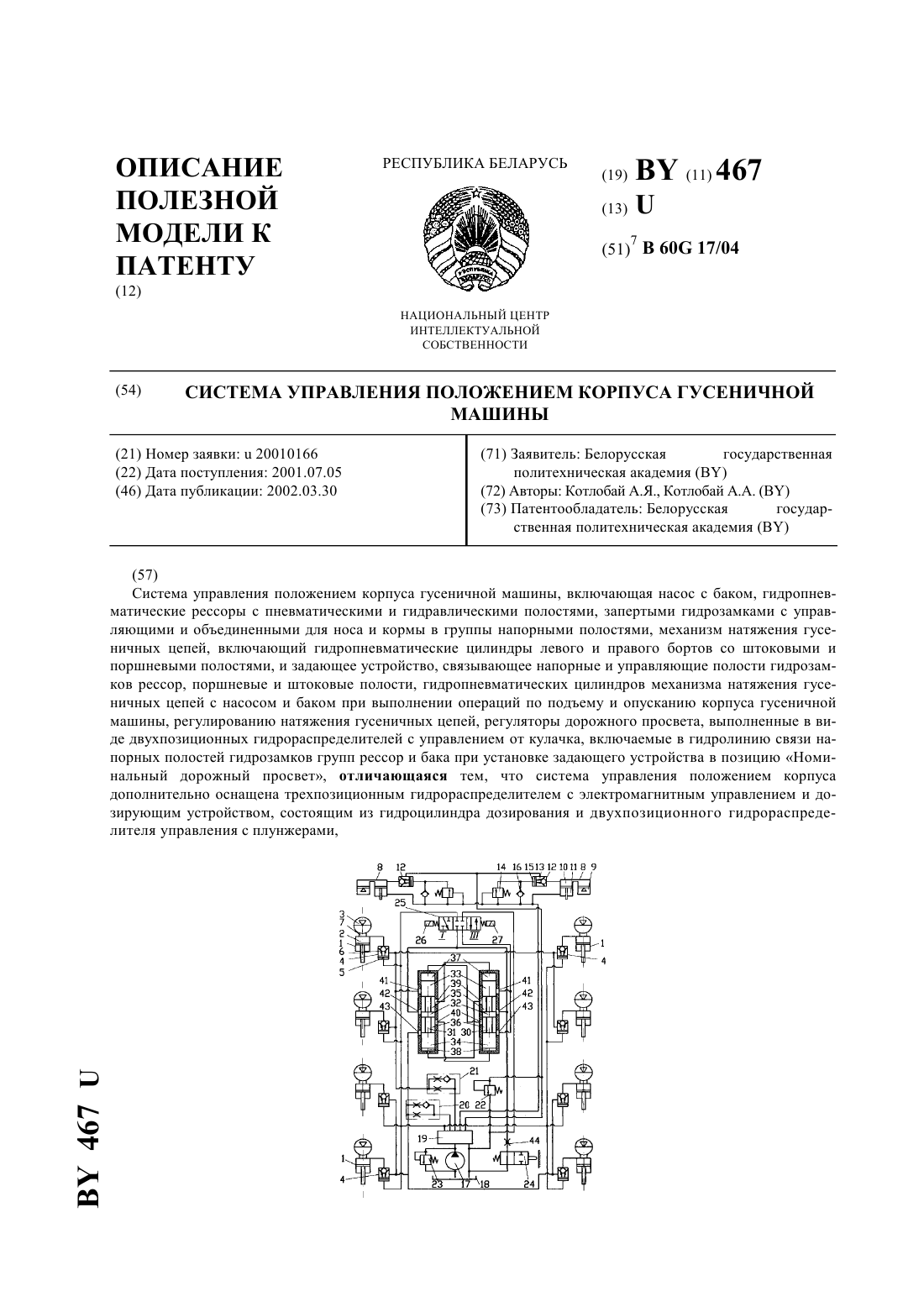
...дозирования объемов рабочей жидкости, закачиваемой в гидравлические полости 2 рессор 1, система управления положением корпуса гусеничной машины дополнительно оснащена трехпозиционным гидрораспределителем 25 с электромагнитным управлением посредством электромагнитов 26, 27 и дозирующим устройством, конструктивная схема которого позволяет работу в режимах сумматора и делителя потоков. Дозирующее устройство состоит из одинаковых по конструктивной...
Система управления сцеплениями многозвенного шасси
Номер патента: U 1451
Опубликовано: 30.06.2004
Авторы: Захарик Александр Михайлович, Захарик Юрий Михайлович
МПК: B60K 23/02
Метки: система, шасси, управления, сцеплениями, многозвенного
Текст:
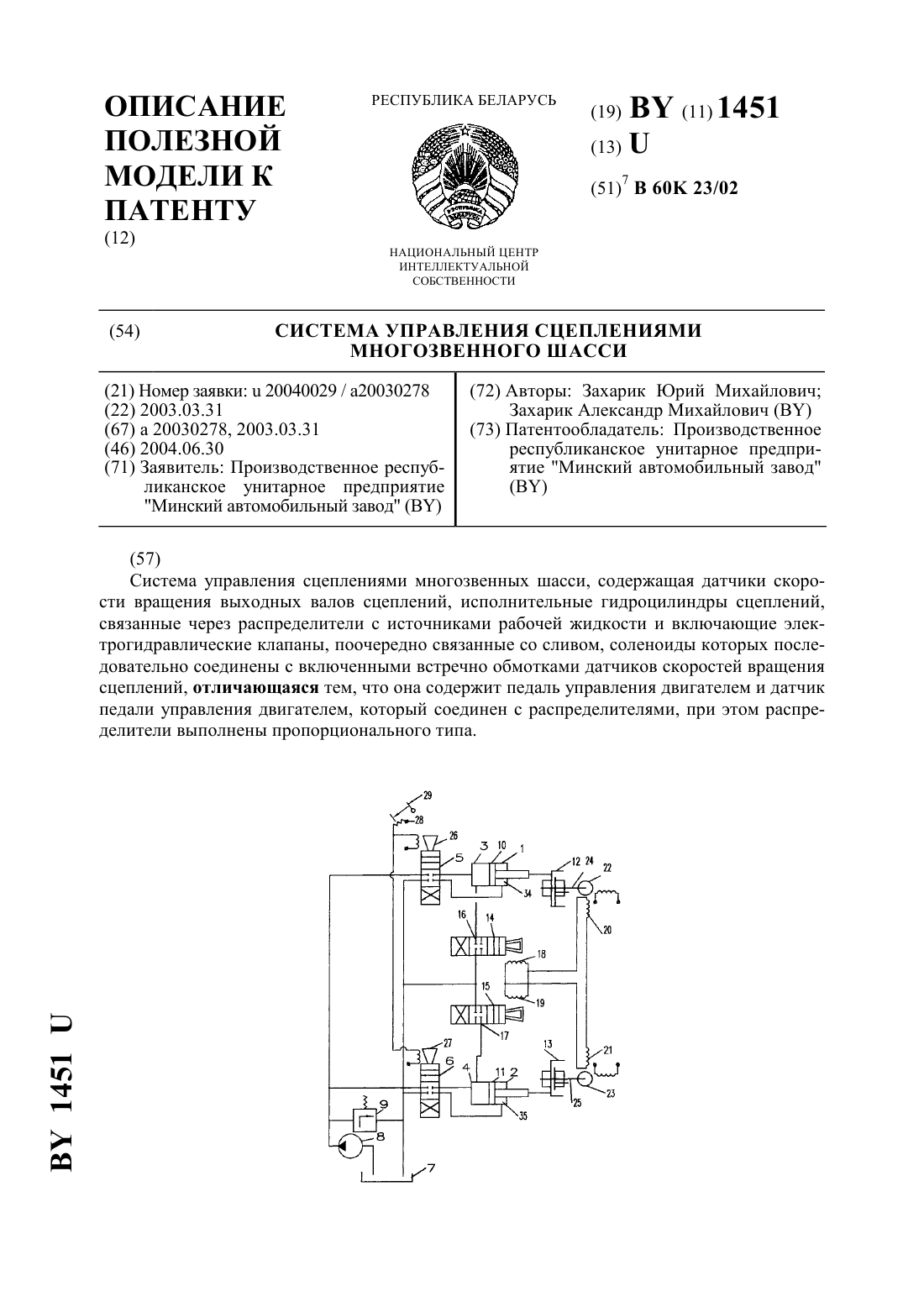
...поочередно соединенными со сливом, соленоиды которых последовательно соединены с включенными встречно обмотками датчиков скоростей вращения валов сцеплений, дополнительно содержит педаль управления двигателем и датчик педали управления двигателем, соединенного с распределителями, при этом распределители выполнены пропорционального типа. Наличие в системе управления сцеплениями многозвенных шасси педали управления двигателем и датчика педали...
Система управления положением корпуса гусеничной машины
Номер патента: U 1739
Опубликовано: 30.12.2004
Авторы: Котлобай Андрей Анатольевич, Котлобай Анатолий Яковлевич
МПК: B60G 17/04
Метки: система, гусеничной, управления, положением, машины, корпуса
Текст:
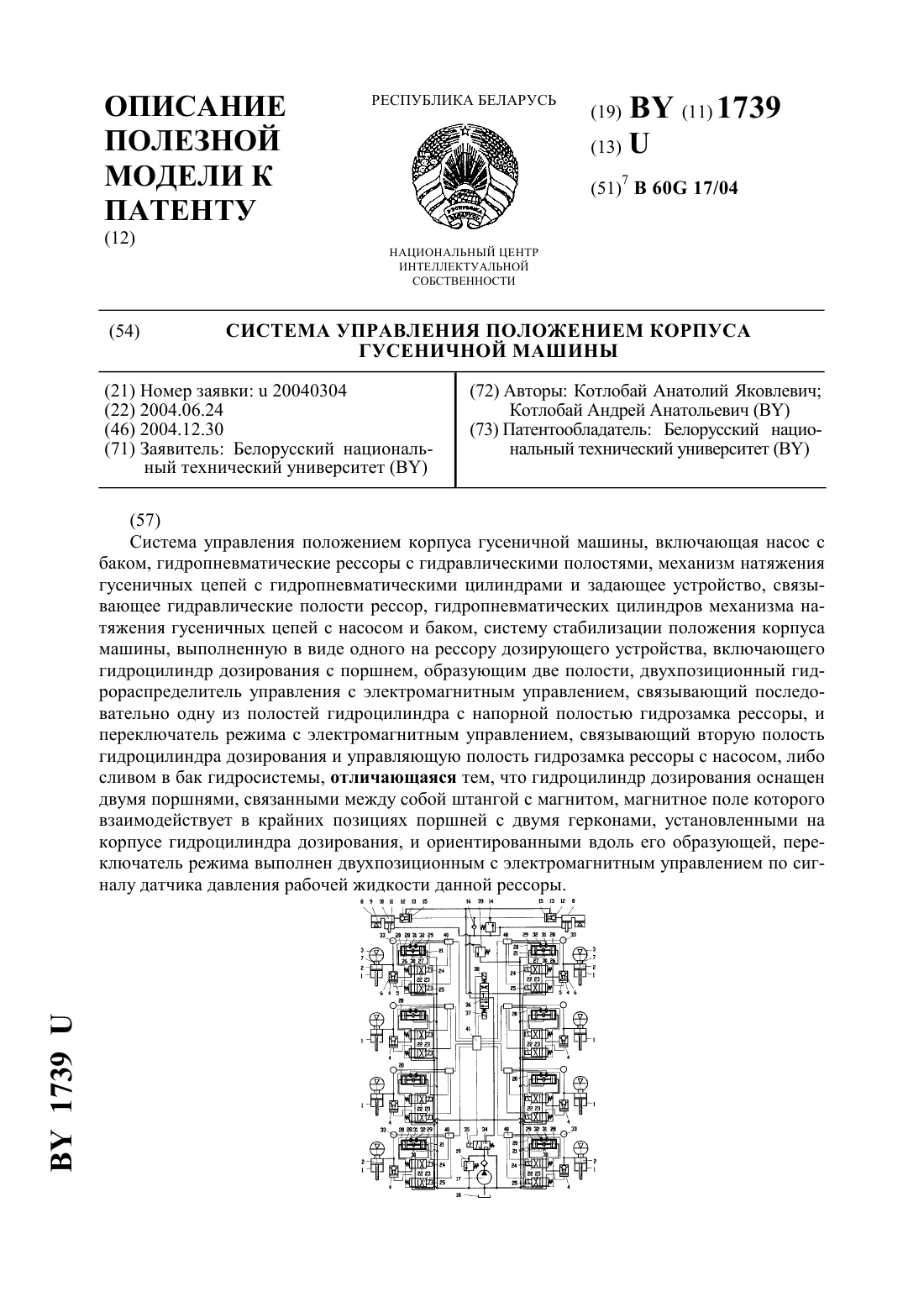
...в зону герконов 31. Герконы 31 замыкаются. Сигналы герконов 31 подаются на блоки управления 40 и далее на задающее устройство 41. При получении задающим устройством 41 сигналов от блоков управления 40 всех дозирующих устройств 20 гидропневматических рессор 1 задающее устройство 41 подает сигнал на блоки управления 40. Блоки управления 40 подают питание на обмотки электромагнитов 24, и гидрораспределители управления 22 переводятся во вторую...
Предыдущий патент: Почвообрабатывающий каток
Следующий патент: Устройство для нанесения гальванического покрытия
Случайный патент: Замок, устойчивый к открыванию отмычкой