Управляемая система подрессоривания кабины колесного транспортного средства
Номер патента: U 3320
Опубликовано: 28.02.2007
Авторы: Высоцкий Михаил Степанович, Ракицкий Антон Антонович, Мажей Андрей Андреевич

Текст
ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ к ПАТЕНТУ(54) УПРАВЛЯЕМАЯ СИСТЕМА ПОДРЕССОРИВАНИЯ КАБИНЫ(71) Заявитель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси (ВУ)(72) Авторы Высоцкий Михаил Степанович Мажей Андрей Андреевич Ракицкий Антон Антонович (ВУ)(73) Патентообладатель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси (ВУ)1. Управляемая система подрессоривания кабины колесного транспортного средства,содержащая неподрессоренную массу, по крайней мере один упругий элемент и по крайней мере один управляемый амортизатор, соединяющие кабину с рамой, по крайней мере один датчик для получения информации о движении кабины в вертикальной плоскости,контроллер для обработки информации упомянутого датчика и формирования управляюЩего сигнала для упомянутого амортизатора, отличающаяся тем, что упомянутый датчик для получения информации о движении кабины в вертикальной плоскости связан с неподрессоренной массой.2. Система по п. 1, отличающаяся тем, что в качестве неподрессоренной массы служит передний мост.3. Система по п. 1, отличающаяся тем, что в качестве неподрессоренной массы служит по меньшей мере одно из колес.4. Система по п. 1 или п. 2, или п. 3, отличающаяся тем, что в качестве датчика для получения информации о движении кабины в вертикальной плоскости служит датчик ускорения.(56) 1. М. СгозЬу, КА. Нагшооб, В. Кашорр. УйЬгайоп сошго 1 1151113 зешйасйуе Гогсе депегаготз АЗМЕ о 11 ша 1 оГ Епйпеегйп Гог 1 п 1115 гу, 1974, 96(2), рр. 619-626. 2. Патент США Не 6070681.Предлагаемая полезная модель относится К области машиностроения, а именно К средствам виброзащиты кабин автомобилей, тракторов, дорожно-строительнь 1 х И других Мобильных машин.Известно несколько систем подрессоривания кабины водителя. Система подрессоривания состоит из упругого, демпфирующего и направляющего элементов, соединяющих кабину и несущую часть конструкции - раму. В качестве демпфирующего элемента обь 1 чно используются гидравлические амортизаторы, в качестве упругого элемента - пневматические упругие элементы. С одной стороны, для предотвращения излишних угловых колебаний кабины демпфирующее устройство должно создавать пониженные силы сопротивления относительным перемещениям кабины и рамы. С другой стороны, для снижения негативного эффекта от неровностей дорожного профиля, передающихся на пол кабины,требуется уменьшить степень сопротивления демпфирующего устройства.Противоречие в большой степени удается разрешить путем применения управляемых демпфирующих устройств - управляемых амортизаторов 1. Принцип действия управляемого амортизатора заключается в изменении сечения дроссельного элемента с применением сервопривода, либо вязкости специальной электрореологической или магнитореологической жидкости в соответствии с полученным электрическим сигналом от блока управления. В отличие от традиционного амортизатора, имеющего одну характеристику,то есть зависимость усилия сопротивления от скорости, управляемый амортизатор имеет либо несколько характеристик при дискретном регулировании, либо бесконечное число при бесступенчатом регулировании. Подвеска, в которой содержится демпфирующий элемент с регулируемой характеристикой сопротивления, называется полуактивной. Блок управления формирует необходимый управляющий сигнал на основании показаний датчиков и алгоритма управления. Алгоритм управления в значительной степени определяет конструкцию полуактивной подвески.Ближайшим аналогом предлагаемой полезной модели является управляемая система подрессоривания кабины, предлагаемая в 2. Сигналы одного или нескольких датчиков относительного взаимного вертикального перемещения кабины и рамы поступают в управляющий контроллер. Возможно также дополнение системы датчиками начала торможения, разгона, угловых колебаний кабины. Управляющий контроллер на основании полученных сигналов от датчиков изменяет характеристики одного или нескольких управляемых амортизаторов.Недостатком описанной системы является ее недостаточное быстродействие, определяемое временем отклика. Время отклика описанной системы состоит из времени получения и обработки сигналов датчика, времени переключения амортизатора. Поскольку время отклика не может быть равным нулю, параметры относительного движения кабины и рамы на момент переключения амортизатора никогда не соответствуют измеренным. Это приводит к неточному управлению и ухудшению виброзащиты водителя и пассажиров. Для точного управления необходимо возможно большее снижение времени отклика, связанное с увеличением быстродействия датчиков, линий передачи данных, контроллера и амортизаторов, что повышает стоимость системы полуактивного подрессоривания кабины.Задачей настоящего технического решения является разработка полуактивной системы подрессоривания кабины с повышенным быстродействием.Для решения поставленной задачи система подрессоривания кабины, содержащая упругий элемент, управляемый демпфирующий элемент, направляющий элемент и управляющий контроллер, должна содержать как минимум один датчик вертикального ускоре 2ния неподрессоренной массы, расположенной спереди кабины по ходу движения или под кабиной. Неподрессоренной массой может являться мост, одно или несколько колес.Снижение требований К быстродействию системы достигается путем применения предсказания. При наезде на препятствие колесо приобретает значительное вертикальное ускорение, которое фиксируется датчиком. При этом перемещения рамы запаздывают по отношению к перемещениям колеса в соответствии с передаточной функцией колебательного звена основной системы подрессоривания. Контроллер управления выбирает характеристику управляемого амортизатора, исходя из показаний датчика. Запаздывание колебаний рамы по отношению к перемещениям неподрессоренных масс позволяет в случае необходимости переключить амортизаторы подвески кабины заблаговременно и скомпенсировать время отклика компонентов системы.Предлагаемая полуактивная система подрессоривания является простой по конструкции, позволяет повысить быстродействие системы подрессоривания и улучшить виброзащиту кабинь 1 мобильной машины при отсутствии жестких требований к быстродействию измерительных, вычислительных и исполнительных элементов.На чертеже изображена функциональная схема предлагаемой системы подрессоривания кабины.Кабина 1 связана с подрессоренной рамой 2 направляющим элементом 3, упругим элементом подвески кабины 4, управляемым амортизатором подвески кабины 5.Подрессоренная рама 2 с неподрессоренной массой 6 соединяются главным упругим элементом 7 и главным демпфирующим элементом 8, образующими главную систему подрессоривания. Вертикальные ускорения неподрессоренной массы 6 измеряет датчик для получения информации о движении кабины в вертикальной плоскости 9 (далее - датчик), показания которого передаются в контроллер для обработки информации упомянутого датчика и формирования управляющего сигнала 10 (далее - контроллер). Контроллер 10 на основании алгоритма управления формирует сигналы для переключения управляемого амортизатора подвески кабины 5 на требуемую характеристику. В качестве датчика 9 предпочтительно использовать датчик ускорения.Предлагаемая управляемая система подрессоривания кабины работает следующим образом. Изначально управляемый амортизатор подвески кабины 5 работает в режиме повь 1 шенного сопротивления. Значения вертикального ускорения, поступающие с датчика 9,сравниваются по величине с пороговым значением. При превышении порогового значения амортизатор подвески кабины 5 переключается контроллером 10 в режим с пониженным сопротивлением. Далее амортизатор подвески кабины 5 находится в режиме пониженного сопротивления установленный период времени, зависящий от свойств основной системы подрессоривания. В случае регистрации в течение упомянутого периода времени нового превышения вертикальным ускорением неподрессоренной массы 6 порогового значения отсчет времени повторяется. По истечении упомянутого периода времени управляемый амортизатор подвески кабины 5 возвращается в режим повышенного сопротивления.Описанный алгоритм позволит при переезде неровности уменьшить вертикальные ускорения кабины за счет своевременного уменьшения сопротивления амортизатора и уменьшить дальнейшее раскачивание кабины за счет быстрого переключения амортизатора в режим повышенного сопротивления после переезда неровности.Предлагаемая система подрессоривания кабины может иметь любое число амортизаторов подвески кабины, управляемых по единому принципу, описанному выше. Для повышения точности работы возможна установка датчиков на несколько неподрессоренных масс, например на левое и правое колеса, а также мост. Могут быть установлены дополнительные датчики, уточняющие алгоритм управления при разгоне, торможении, повороте.Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B62D 33/06
Метки: кабины, средства, управляемая, подрессоривания, система, транспортного, колесного
Код ссылки
<a href="https://by.patents.su/3-u3320-upravlyaemaya-sistema-podressorivaniya-kabiny-kolesnogo-transportnogo-sredstva.html" rel="bookmark" title="База патентов Беларуси">Управляемая система подрессоривания кабины колесного транспортного средства</a>
Система стабилизации кабины транспортного средства
Номер патента: U 1473
Опубликовано: 30.09.2004
Авторы: Микулик Николай Александрович, Рейзина Галина Николаевна
МПК: B60G 21/10
Метки: средства, транспортного, кабины, система, стабилизации
Текст:
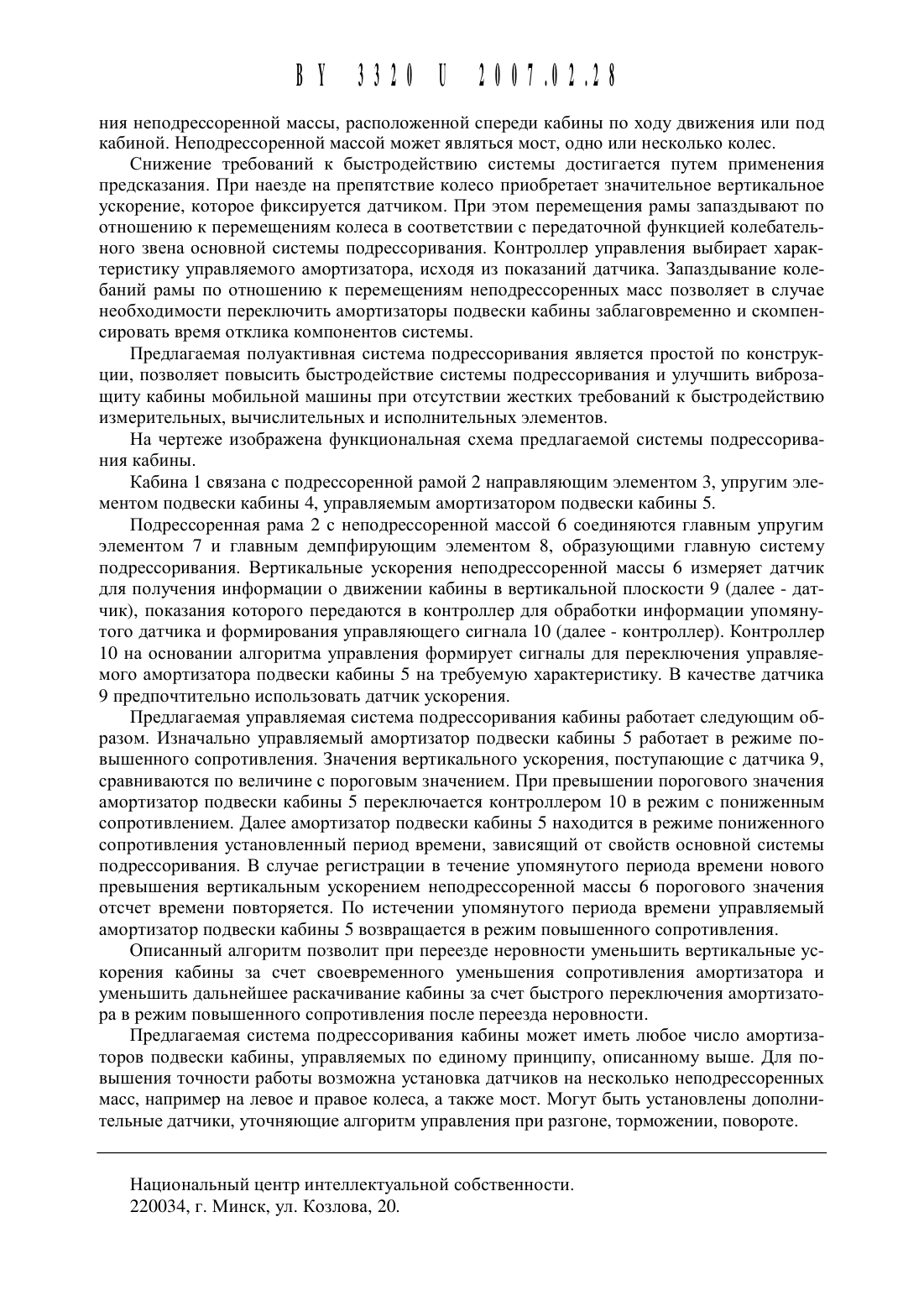
...крепления кабины и улучшении комфортабельности работы водителя за счет снижения крутильных деформаций. Поставленная задача решается тем, что в системе стабилизации кабины транспортного средства, снабженного несущей рамой, на поперечинах которой в трех точках с помощью крепежных устройств установлена кабина, задняя часть кабины посредством крепежных устройств, выполненных в виде демпфирующих элементов, закреплена на задней поперечине...
Подвеска колесного транспортного средства
Номер патента: U 1545
Опубликовано: 30.09.2004
Авторы: Рейзина Галина Николаевна, Микулик Николай Александрович
МПК: B60G 21/00
Метки: транспортного, колесного, подвеска, средства
Текст:
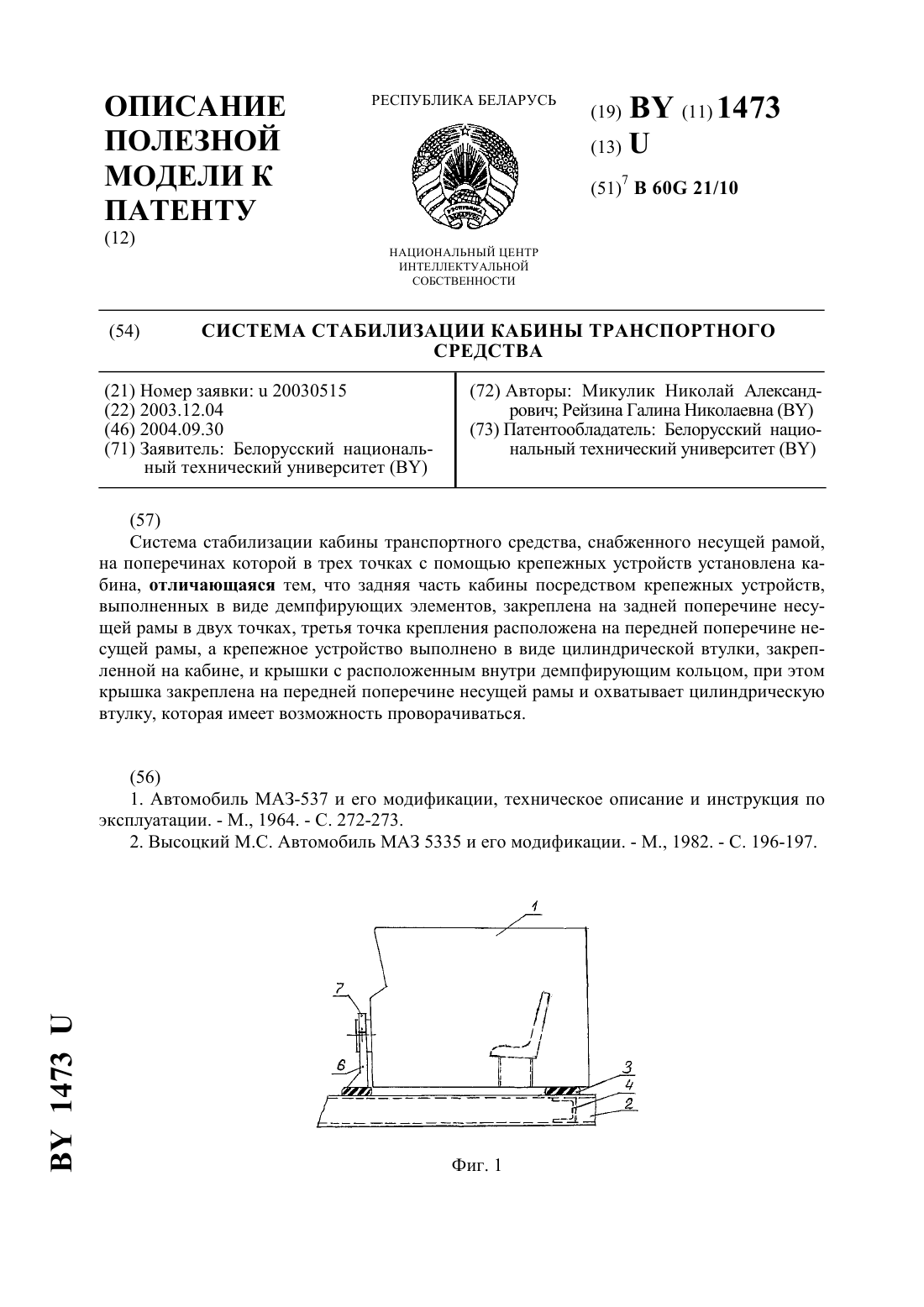
...торсионных валов, помещенных в защитные трубы, амортизаторы гидравлического типа, буфера сжатия и отбоя, верхние и нижние рычаги вильчатого типа, кронштейны крепления рычагов подвески, при этом торсионные валы одними концами соединены с рычагами подвески через шлицевые насадки и шлицы труб рычагов, другими - через шлицевые концы закреплены в кронштейнах подвески. Однако при эксплуатации колесного транспортного средства, особенно в условиях...
Каркас кабины транспортного средства
Номер патента: U 269
Опубликовано: 30.06.2001
Авторы: Ильченко Георгий Георгиевич, Резаков Михаил Евсигнеевич, Коробкин Владимир Андреевич, Плахотник Василий Григорьевич
МПК: B62D 33/06
Метки: каркас, транспортного, кабины, средства
Текст:
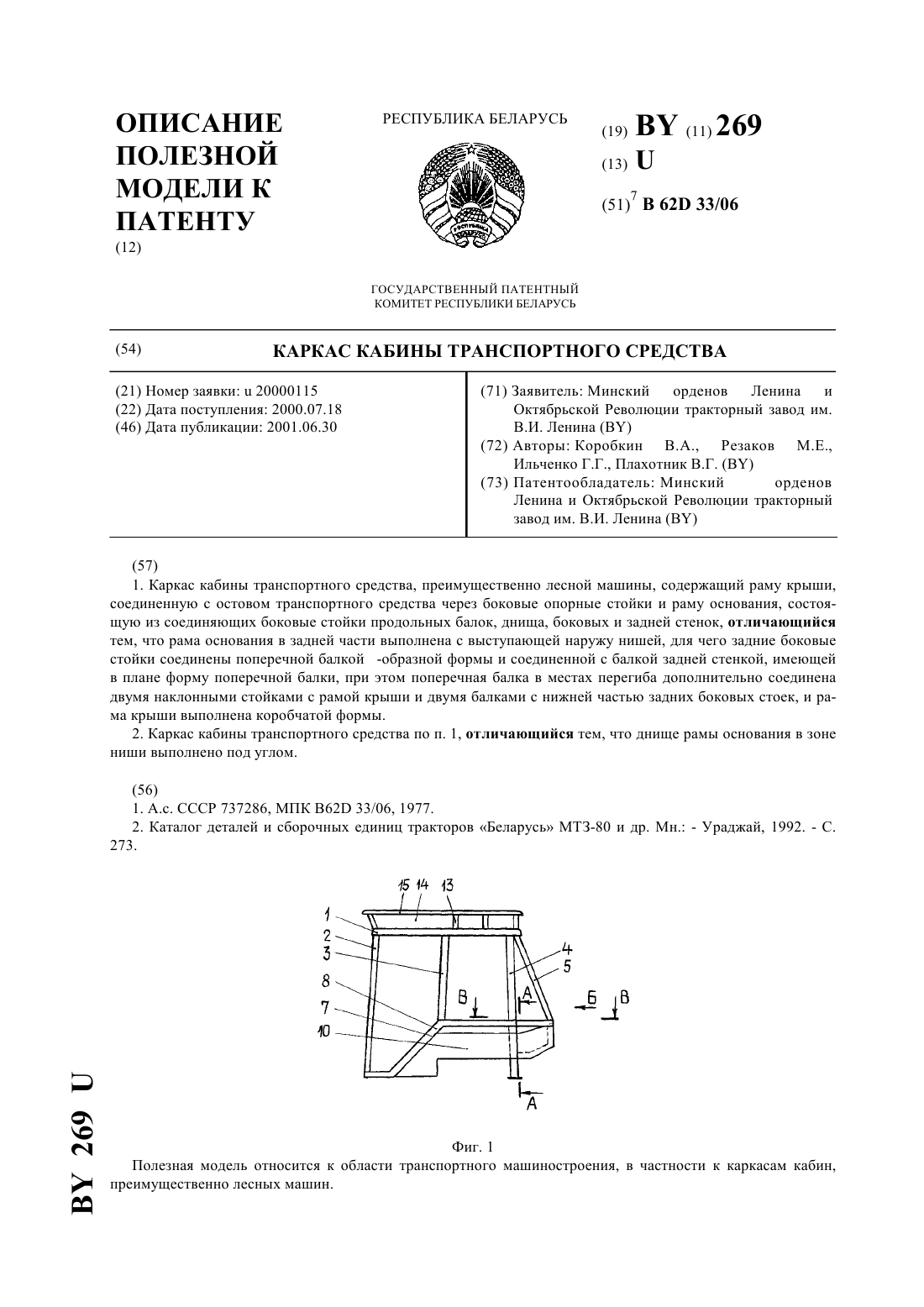
...балкой - образной формы и соединенной с ней задней стенкой, имеющей форму поперечной балки. Для обеспечения необходимой жесткости поперечная балка в местах перегиба соединена наклонными стойками с рамой крыши и балками с нижней частью задних боковых стоек, и рама крыши выполнена коробчатой формы. Днище основания в зоне ниши может быть выполнено под углом. Отличительными признаками предлагаемой полезной модели является выполнение в задней...
Гидропневматическая система подрессоривания моста мобильной машины
Номер патента: U 3319
Опубликовано: 28.02.2007
Авторы: Высоцкий Михаил Степанович, Мажей Андрей Андреевич, Ракицкий Антон Антонович, Ермаленок Валерий Генрихович
МПК: B60G 17/04
Метки: машины, мобильной, моста, гидропневматическая, система, подрессоривания
Текст:
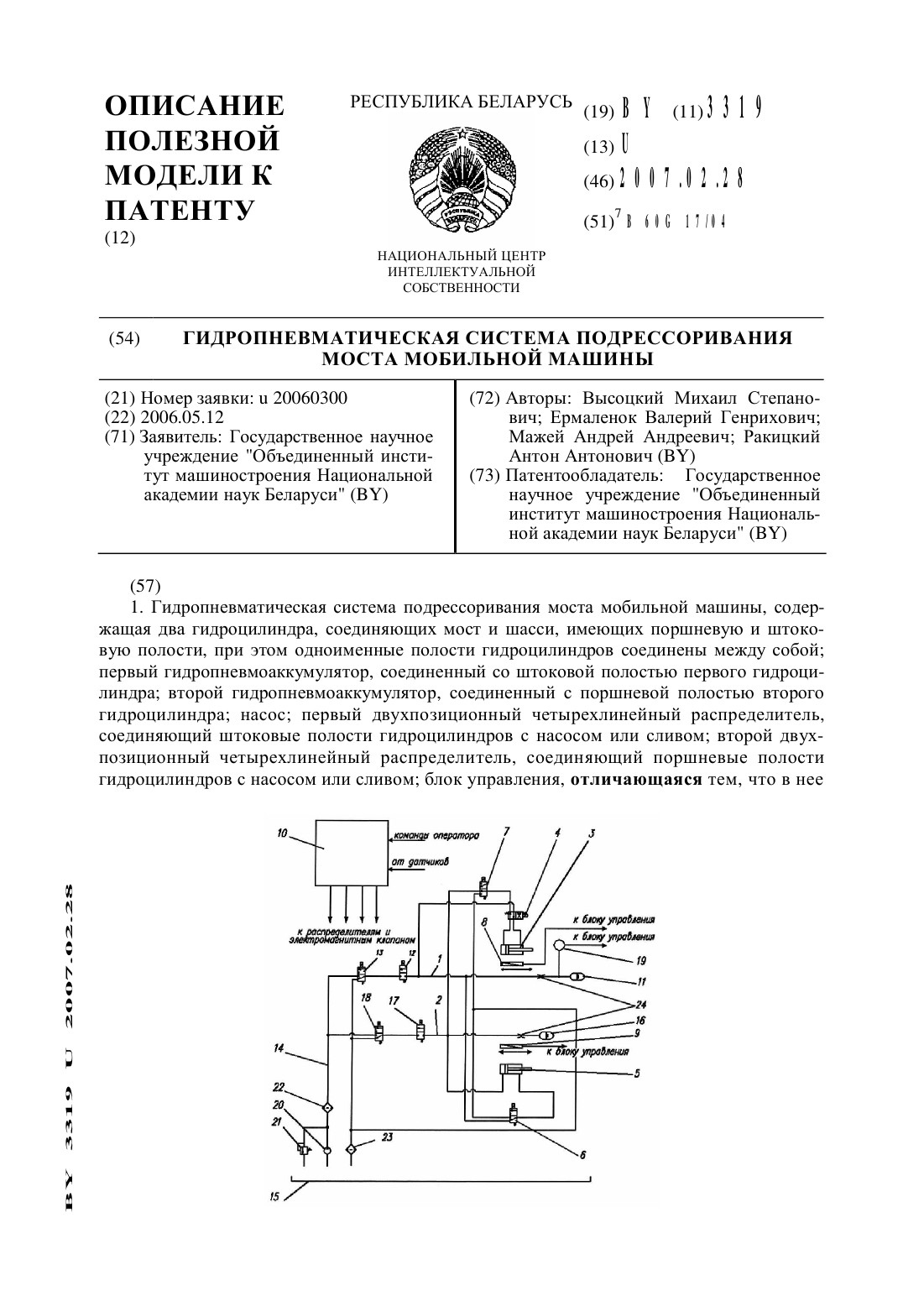
...двустороннего действия с общими поршневыми и штоковыми полостями к гидроцилиндрам одностороннего действия с независимым регулированием давления в поршневых полостях и обратно.Для решения поставленной задачи предлагается дополнить гидропневматическую подвеску тремя распределителями с электромагнитным управлением. Третий двухпозиционный четырехлинейный распределитель подключен к первому гидроцилиндру, соединяющему мост и шасси, и по команде...
Узел колесного тормоза транспортного средства
Номер патента: 4969
Опубликовано: 30.03.2003
Авторы: Крицкий Михаил Андреевич, Мальцев Николай Григорьевич, Корсаков Владимир Владимирович, Рипинский Михаил Сергеевич
Метки: транспортного, колесного, узел, средства, тормоза
Текст:
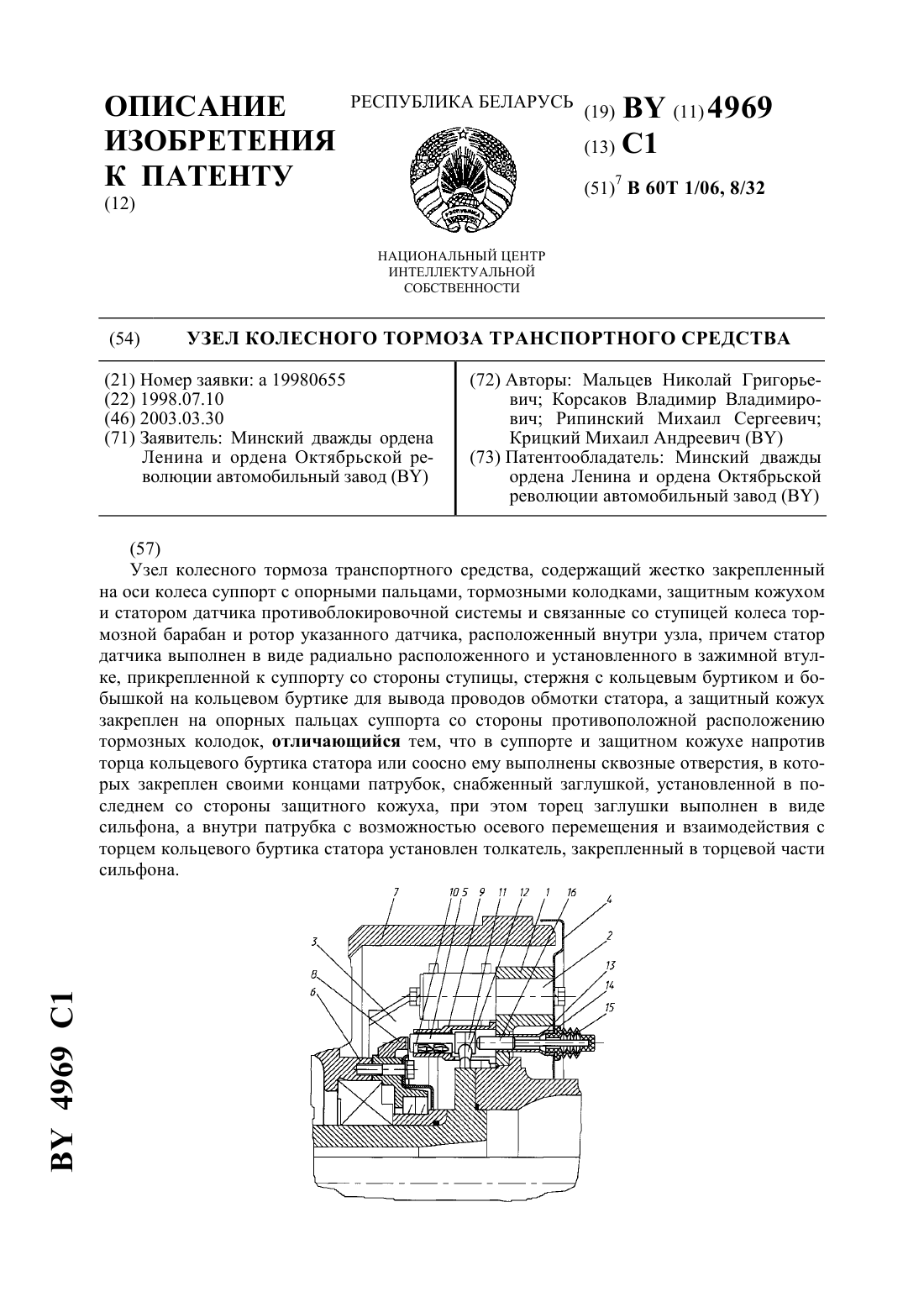
...возможность повреждения датчика при монтажных и ремонтных работах, а также при разрегулировке подшипников ступицы, однако не позволяет провести гарантированную установку или контрольную проверку минимально возможного рабочего зазора между статором и ротором при монтаже и в процессе эксплуатации без снятия тормозного барабана и тормозных колодок. Задача изобретения - снижение трудоемкости регулировки и контрольной проверки...
Предыдущий патент: Бетоносмесительная установка
Следующий патент: Гидравлический усилитель
Случайный патент: Керамическая масса для изготовления черепицы