Привод педальный
Текст
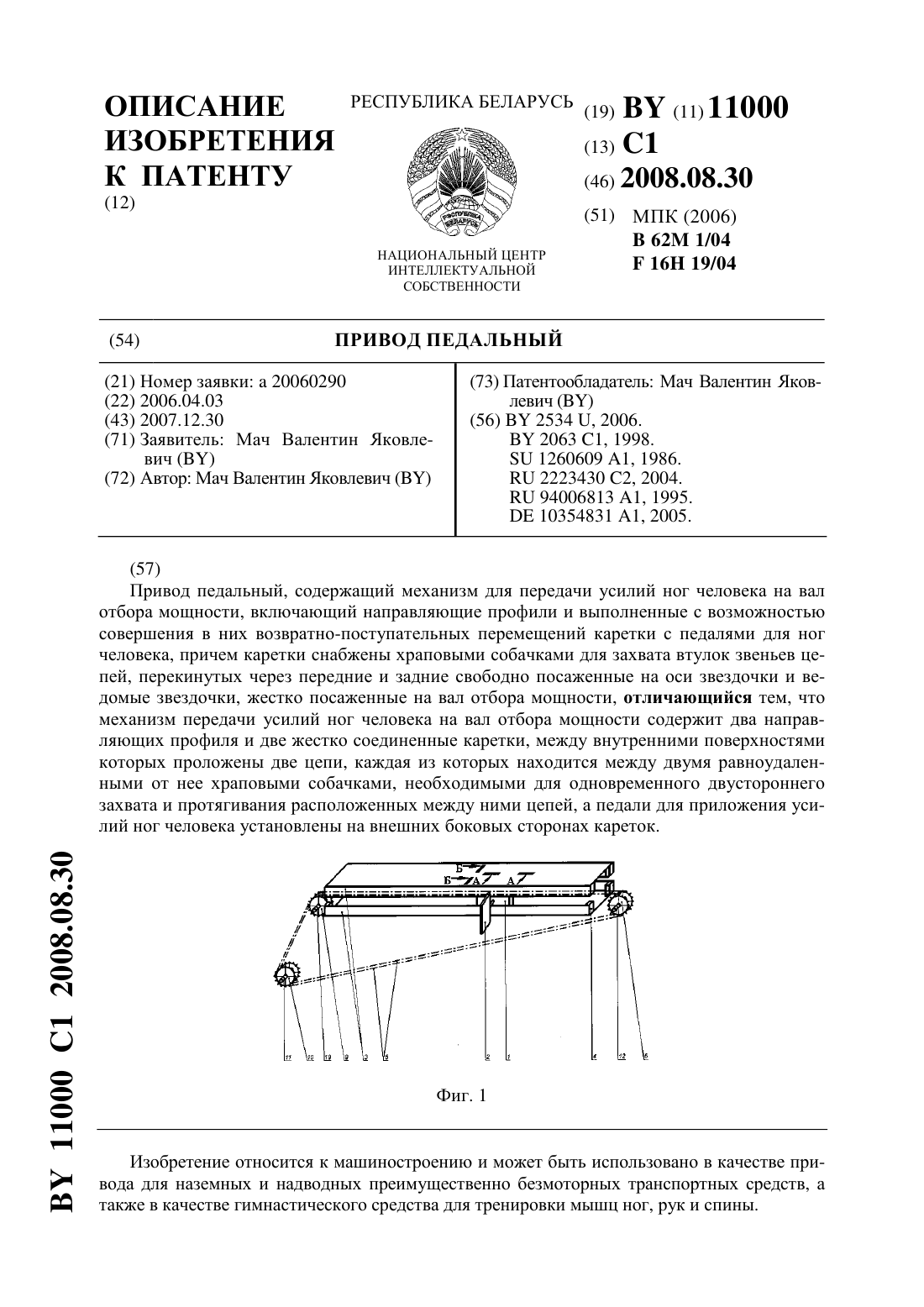
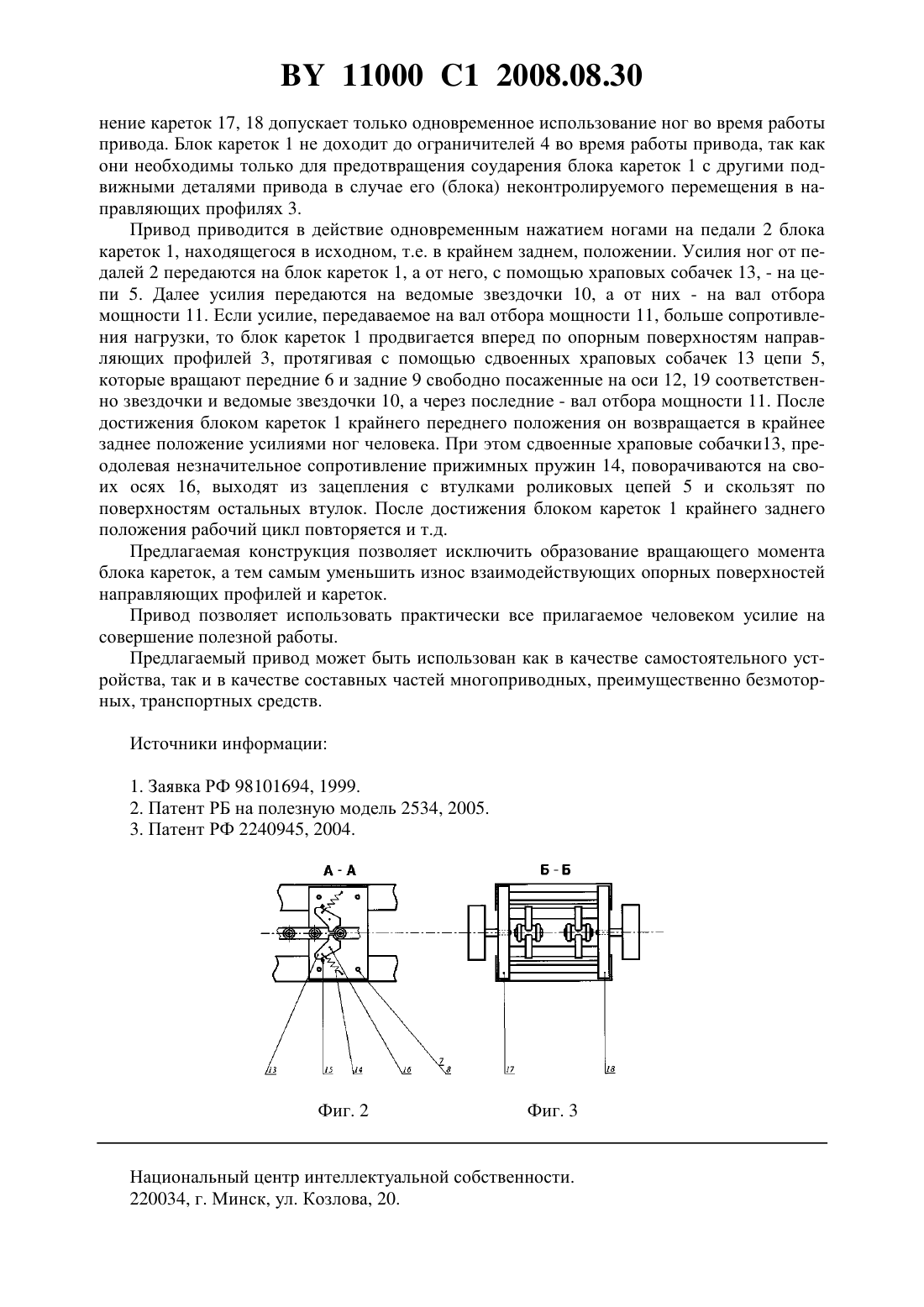
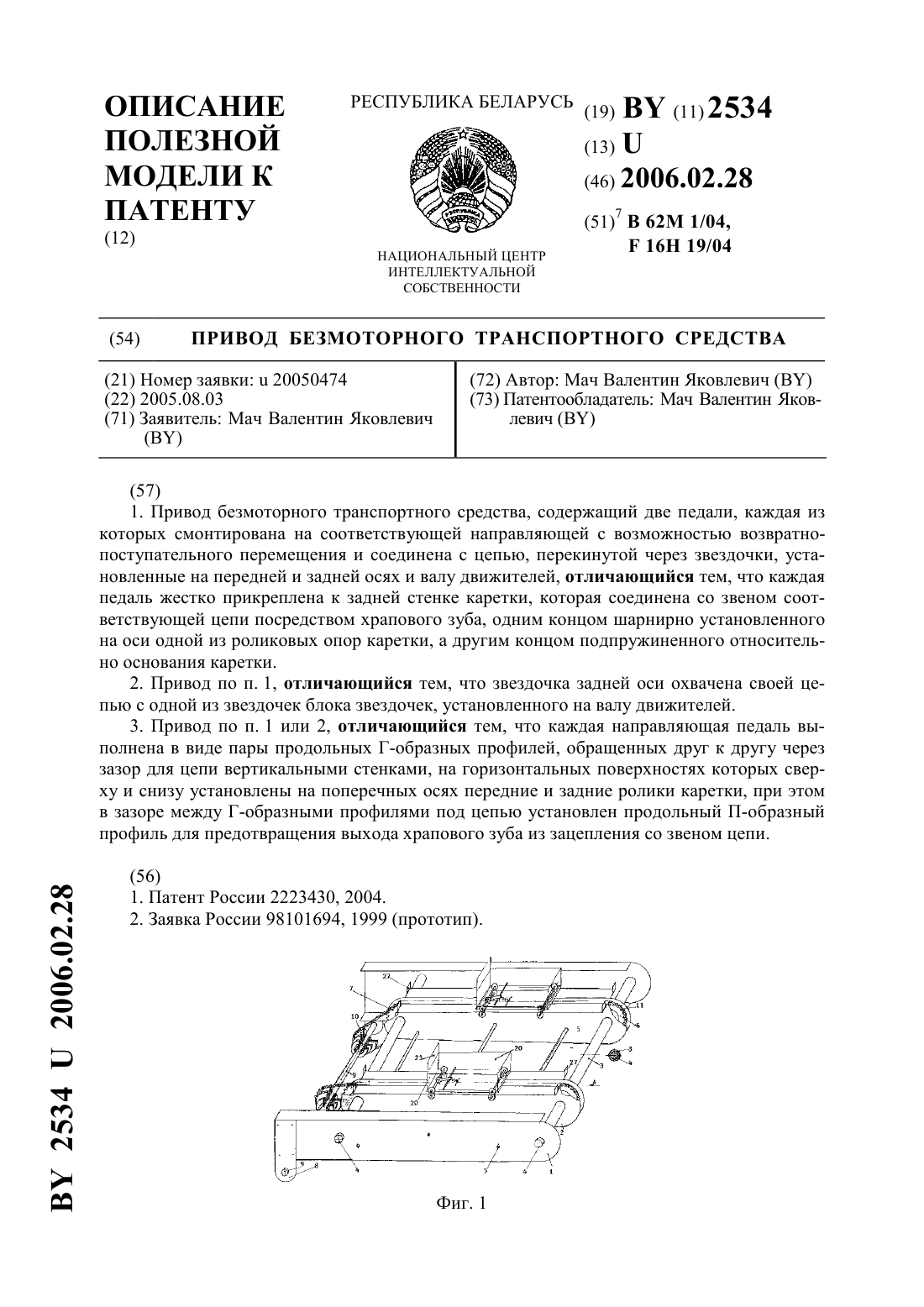
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Мач Валентин Яковлевич(72) Автор Мач Валентин Яковлевич(73) Патентообладатель Мач Валентин Яковлевич(57) Привод педальный, содержащий механизм для передачи усилий ног человека на вал отбора мощности, включающий направляющие профили и выполненные с возможностью совершения в них возвратно-поступательных перемещений каретки с педалями для ног человека, причем каретки снабжены храповыми собачками для захвата втулок звеньев цепей, перекинутых через передние и задние свободно посаженные на оси звездочки и ведомые звездочки, жестко посаженные на вал отбора мощности, отличающийся тем, что механизм передачи усилий ног человека на вал отбора мощности содержит два направляющих профиля и две жестко соединенные каретки, между внутренними поверхностями которых проложены две цепи, каждая из которых находится между двумя равноудаленными от нее храповыми собачками, необходимыми для одновременного двустороннего захвата и протягивания расположенных между ними цепей, а педали для приложения усилий ног человека установлены на внешних боковых сторонах кареток. Фиг. 1 Изобретение относится к машиностроению и может быть использовано в качестве привода для наземных и надводных преимущественно безмоторных транспортных средств, а также в качестве гимнастического средства для тренировки мышц ног, рук и спины. 11000 1 2008.08.30 Известен привод 1, содержащий рычаг с педалями, установленными с возможностью возвратно-поступательных движений, при этом педали соединены с цепью, перекинутой через звездочки, каждая из двух педалей соединена также с двумя подшипниками, скользящими по салазкам, а звездочки соединены с преобразователем, вращающим ведомую звездочку, которая закреплена на заднем колесе велосипеда. Наиболее близким к предложенному решению является привод 2, содержащий механизм передачи усилий ног человека на вал отбора мощности, включающий две пары жестко соединенных между собой направляющих профилей, в которых совершают возвратно-поступательные перемещения независимые каретки с педалями для ног человека в верхней части и снабженные в нижней части подпружиненными с одной стороны храповыми собачками для захвата и протягивания вслед за каретками звеньев цепей, перекинутых через передние и задние свободно посаженные на оси звездочки и ведомые звездочки, жестко посаженные на вал отбора мощности. Недостатком прототипа является то, что в механизме передачи усилий ног человека на вал отбора мощности происходит повышенный износ взаимодействующих опорных поверхностей кареток и направляющих профилей из-за наличия вращающего момента, образующегося в результате действия на каретки пары сил, одной из которых является сила,прилагаемая на педаль ногой человека, а другой - сила реакции звена цепи, взаимодействующего с храповой собачкой. Поставленная задача, решаемая данным изобретением, заключается в устранении недостатков прототипа изменением конструкции механизма передачи усилий ног человека на вал отбора мощности. В механизме передачи усилий ног человека на вал отбора мощности исключение образования вращающих моментов кареток решается конструктивными изменениями направляющих профилей и самих кареток. Рабочий ход кареток вперед обеспечивается наличием упора для спины, образуемого конструкцией сиденья. Ход кареток назад обеспечивается использованием велотуфли с шипом для разъемного крепления к педали 3. Незначительное сопротивление перемещению кареток назад компенсируется упором рук человека в руль. На фиг. 1 схематично показан общий вид привода педального. На фиг. 2 показано сечение А - А, обозначенное на фиг. 1. На фиг. 3 показано сечение Б - Б, обозначенное на фиг. 1. В двух направляющих профилях 3 имеют возможность совершать возвратнопоступательные перемещения две жестко соединенные между собой болтами 7 через распорные втулки 8 , каретки 17, 18, образующие единый блок кареток 1. Между внутренними поверхностями кареток 17, 18 проходят две цепи 5, перекинутые через передние 6 и задние 9 свободно посаженные на оси 12, 19 соответственно звездочки и ведомые звездочки 10, жестко посаженные на вал отбора мощности 11. Каждая цепь 5 находится между двумя храповыми собачками 13, установленными через распорные втулки на осях 16 и расположенными напротив звеньев цепей 5, на равном от них удалении, для одновременного двустороннего захвата и протягивания находящихся между ними цепей вслед за блоком кареток 1. Рабочая поверхность каждой пары храповых собачек 13, находящихся на своих упорах 15 под действием прижимных пружин 14, образована цилиндрической поверхностью, диаметр которой равен диаметру втулки звена цепи 5. На внешних боковых сторонах блока кареток 1 установлены педали 2 для приложения усилий ног человека. Для исключения возможности возникновения вращающего момента блока кареток 1 оси симметрии втулок звеньев цепей 5, захваченных храповыми собачками 13, пара сил, образуемая ногами человека, и сила реакции звена цепи 5 находятся в горизонтальной плоскости симметрии кареток 17, 18. Использование для захвата звеньев цепей 5 двух храповых собачек 13 позволяет более надежно захватывать цепи 5 при укороченной длине рабочих зубьев. В свою очередь, укороченные рабочие зубья облегчают выход храповых собачек 13 из зацепления с звеньями цепей 5 при обратном ходе блока кареток 1. Жесткое соеди 2 11000 1 2008.08.30 нение кареток 17, 18 допускает только одновременное использование ног во время работы привода. Блок кареток 1 не доходит до ограничителей 4 во время работы привода, так как они необходимы только для предотвращения соударения блока кареток 1 с другими подвижными деталями привода в случае его (блока) неконтролируемого перемещения в направляющих профилях 3. Привод приводится в действие одновременным нажатием ногами на педали 2 блока кареток 1, находящегося в исходном, т.е. в крайнем заднем, положении. Усилия ног от педалей 2 передаются на блок кареток 1, а от него, с помощью храповых собачек 13, - на цепи 5. Далее усилия передаются на ведомые звездочки 10, а от них - на вал отбора мощности 11. Если усилие, передаваемое на вал отбора мощности 11, больше сопротивления нагрузки, то блок кареток 1 продвигается вперед по опорным поверхностям направляющих профилей 3, протягивая с помощью сдвоенных храповых собачек 13 цепи 5,которые вращают передние 6 и задние 9 свободно посаженные на оси 12, 19 соответственно звездочки и ведомые звездочки 10, а через последние - вал отбора мощности 11. После достижения блоком кареток 1 крайнего переднего положения он возвращается в крайнее заднее положение усилиями ног человека. При этом сдвоенные храповые собачки 13, преодолевая незначительное сопротивление прижимных пружин 14, поворачиваются на своих осях 16, выходят из зацепления с втулками роликовых цепей 5 и скользят по поверхностям остальных втулок. После достижения блоком кареток 1 крайнего заднего положения рабочий цикл повторяется и т.д. Предлагаемая конструкция позволяет исключить образование вращающего момента блока кареток, а тем самым уменьшить износ взаимодействующих опорных поверхностей направляющих профилей и кареток. Привод позволяет использовать практически все прилагаемое человеком усилие на совершение полезной работы. Предлагаемый привод может быть использован как в качестве самостоятельного устройства, так и в качестве составных частей многоприводных, преимущественно безмоторных, транспортных средств. Источники информации 1. Заявка РФ 98101694, 1999. 2. Патент РБ на полезную модель 2534, 2005. 3. Патент РФ 2240945, 2004. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 3
МПК / Метки
МПК: B62M 1/04, F16H 19/04
Код ссылки
<a href="https://by.patents.su/3-11000-privod-pedalnyjj.html" rel="bookmark" title="База патентов Беларуси">Привод педальный</a>
Привод педальный комбинированный
Номер патента: U 3223
Опубликовано: 30.12.2006
Автор: МАЧ Валентин Яковлевич
МПК: B62M 1/00, F16H 19/00
Метки: комбинированный, педальный, привод
Текст:
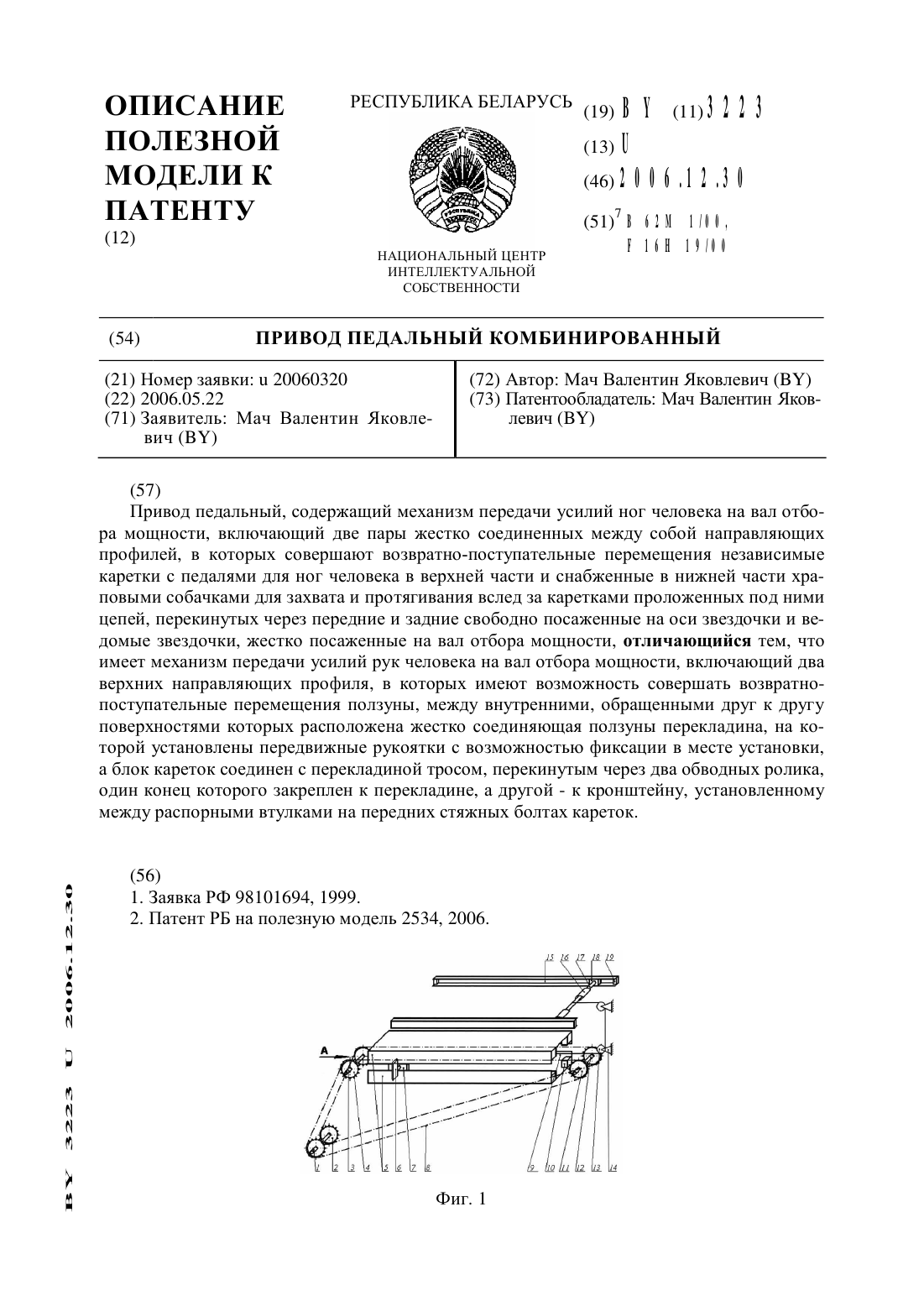
...ними цепей 8 вслед за блоком кареток 7. Рабочая поверхность каждой пары храповых собачек 26,находящихся на своих упорах 27 под действием прижимных пружин 28, образована цилиндрической поверхностью, диаметр которой равен диаметру втулки звена цепи 8. На внешних боковых сторонах блока кареток 7 установлены педали 6 для приложения усилий ног человека. Использование для захвата звеньев цепей 8 двух храповых собачек 26 позволяет более надежно...
Привод педальный комбинированный с удвоенным ходом ползунов

Номер патента: U 3424
Опубликовано: 30.04.2007
Автор: МАЧ Валентин Яковлевич
МПК: F16H 19/00, B62M 1/00
Метки: ползунов, комбинированный, педальный, ходом, привод, удвоенным
Текст:
...сторонами кареток 10, 16 и закрепленными на них щитками 9 на осях 29, расположенными оппозитно относительно цепей 7 для одновременного двустороннего захвата и протягивания находящихся между ними цепей 7 вслед за каретками 10, 16. Рабочие поверхности каждой пары храповых собачек 27, находящихся под действием прижимных пружин 30 на упорах 28, образованы цилиндрической поверхностью, диаметр которой равен внешнему диаметру втулок звеньев цепей...
Привод безмоторного транспортного средства
Номер патента: U 2534
Опубликовано: 28.02.2006
Автор: МАЧ Валентин Яковлевич
МПК: F16H 19/04, B62M 1/04
Метки: транспортного, безмоторного, привод, средства
Текст:
...к задней стенке каретки, которая соединена со звеном соответствующей цепи посредством храпового зуба, одним концом шарнирно установленного на оси одной из роликовых опор каретки, а другим концом подпружиненного относительно основания каретки звездочка задней оси охвачена своей цепью с одной из звездочек блока звездочек, установленного на валу движителей направляющая педали выполнена в виде пары продольных Г-образных профилей,...
Привод трансмиссии малогабаритного трактора
Номер патента: U 1777
Опубликовано: 30.03.2005
Авторы: Кузнецов Антон Дмитриевич, Резвинский Виктор Михайлович
МПК: B60K 17/342
Метки: привод, малогабаритного, трансмиссии, трактора
Текст:
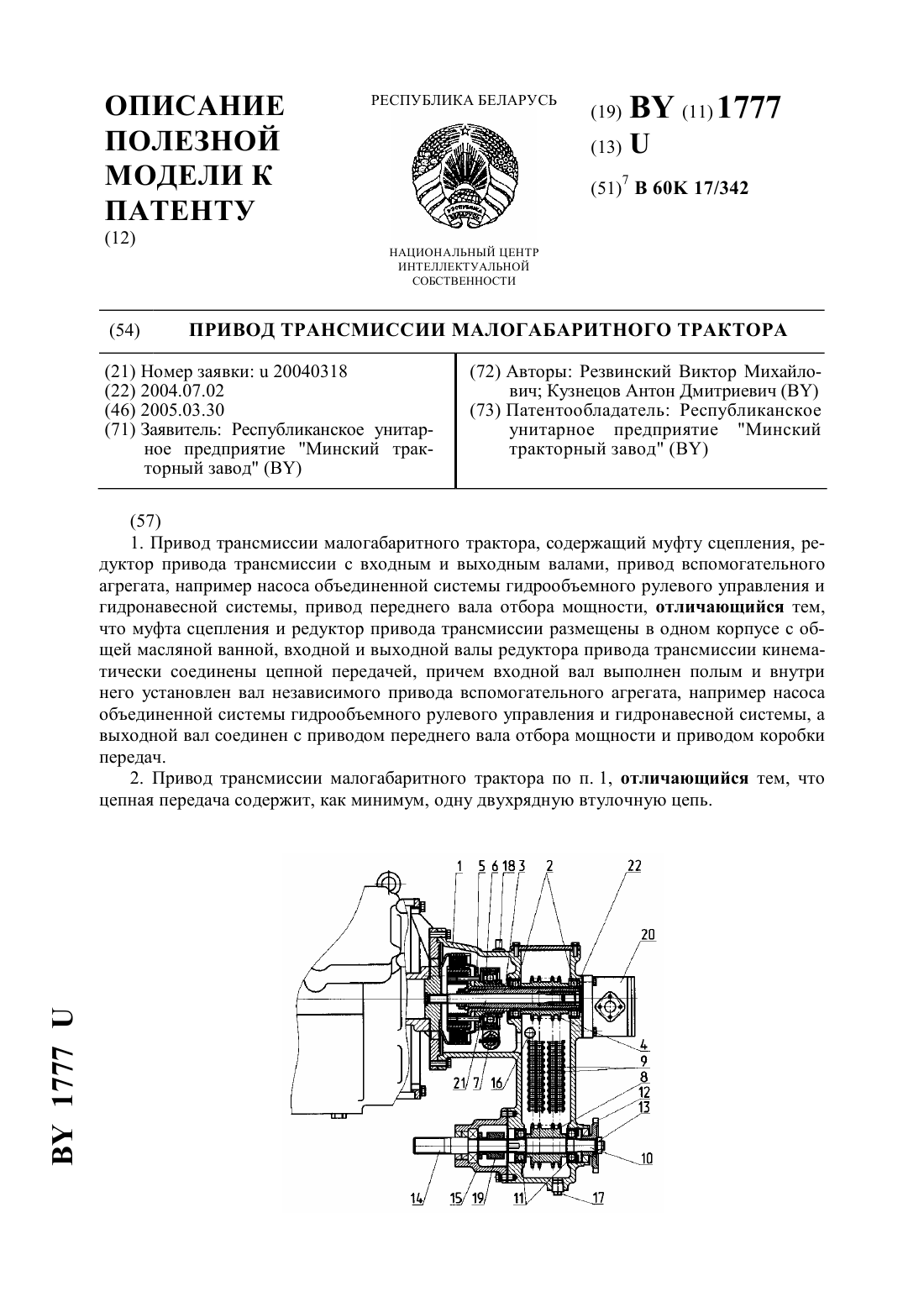
...системы, привод переднего . При этом муфта сцепления и редуктор привода трансмиссии размещены в одном корпусе с общей масляной ванной. Входной и выходной валы редуктора привода трансмиссии кинематически соединены цепной передачей. Входной вал выполнен полым и внутри него установлен вал независимого привода вспомогательного агрегата, например насоса объединенной системы гидрообъемного рулевого управления и гидронавесной системы. Выходной...
Привод вала отбора мощности транспортного средства

Номер патента: 2357
Опубликовано: 30.09.1998
Авторы: Кузнецов Антон Дмитриевич, Трусевич Георгий Георгиевич, Болвако Иван Иванович, Шевик Юрий Михайлович, Амельченко Петр Адамович, Мелешко Михаил Григорьевич
МПК: B60K 17/28
Метки: отбора, транспортного, вала, мощности, средства, привод
Текст:
...элементом передачи крутящего момента, по крайней мере, один дополнительный элемент передачи крутящего момента упомянутой свободно установленной шестерни и соосную ей муфту, снабженную, по крайней мере, одним элементом передачи крутящего момента и установленную с возможностью осевого перемещения. Кинематическая связь ведомого вала привода с ближайшим к входному валу ведомым валом коробки передач может быть выполнена в виде устройства передачи...
Предыдущий патент: Способ профилактики образования лимфокист после операции Вертгейма
Следующий патент: Способ моделирования механической желтухи в эксперименте у млекопитающего
Случайный патент: Состав для приготовления печенья без искусственного разрыхлителя