Трактор для гладкой пахоты отвальным плугом
Номер патента: 14694
Опубликовано: 30.08.2011
Авторы: Яцкевич Владимир Владимирович, Щербакова Ольга Константиновна, Зелёный Пётр Васильевич, Бойков Владимир Петрович
Текст
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ТРАКТОР ДЛЯ ГЛАДКОЙ ПАХОТЫ ОТВАЛЬНЫМ ПЛУГОМ(71) Заявитель Белорусский национальный технический университет(72) Авторы Зелный Птр Васильевич Яцкевич Владимир Владимирович Бойков Владимир Петрович Щербакова Ольга Константиновна(73) Патентообладатель Белорусский национальный технический университет(57) 1. Трактор для гладкой пахоты отвальным плугом, содержащий остов, несущую его ходовую систему, включающую расположенные попарно спереди и сзади остова четыре колесных движителя, причем передняя пара колесных движителей установлена с возможностью поворота в горизонтальной плоскости для направления движения трактора, а задняя пара колесных движителей снабжена дифференциальным приводом вращения и раздельными тормозами, установленные на остове основной, расположенный сзади, и дополнительный, расположенный спереди, механизмы навешивания технологических машин и орудий с управляемыми гидравлическими приводами их подъема и опускания, Фиг. 1 14694 1 2011.08.30 отличающийся тем, что снабжен пятым колесным движителем, закрепленным на дополнительном механизме навешивания с возможностью свободного вращения в вертикальной и поворота в горизонтальной плоскостях, при этом оси вращения и поворота колеса скрещиваются под прямым углом, причем оба механизма навешивания кинематически связаны между собой в противофазе и снабжены устройством разъединения кинематической связи. 2. Трактор по п. 1, отличающийся тем, что дифференциальный привод вращения снабжен устройством вращения колесных движителей задней пары в противоположных направлениях. Изобретение относится к транспортным средствам, преимущественно внедорожным,для механизации технологических процессов в сельском хозяйстве - тракторам. Известен трактор 1, содержащий остов, несущую его ходовую систему из расположенных попарно спереди и сзади трактора четырех колесных движителей, причем передняя пара движителей установлена с возможностью поворота в горизонтальной плоскости для направления движения трактора, а задняя снабжена дифференциальным приводом вращения и раздельными тормозами, механизм навешивания технологических машин и орудий с управляемым гидравлическим приводом их подъема и опускания, установленный сзади трактора на остове. Недостатком трактора является недостаточная поворачиваемость на загонах в процессе выполнения сельскохозяйственных технологических операций. В результате имеют место большие непроизводительные затраты времени на переориентацию движения трактора в конце гона. Известен трактор 2 (прототип), содержащий остов, несущую его ходовую систему,состоящую из расположенных попарно спереди и сзади трактора четырех колесных движителей, причем передняя пара движителей установлена с возможностью поворота в горизонтальной плоскости для направления движения трактора, а задняя снабжена дифференциальным приводом вращения и раздельными тормозами, два установленных на остове механизма навешивания технологических машин и орудий с управляемыми гидравлическими приводами их подъема и опускания, один из которых - основной - расположен сзади, а второй - дополнительный - спереди. Недостатком этого трактора также является недостаточная поворачиваемость на загонах в процессе выполнения сельскохозяйственных технологических операций. В результате имеют место большие непроизводительные затраты времени на переориентацию движения трактора в конце гона. Задачей, решаемой данным изобретением, является улучшение поворачиваемости трактора на загонах во время выполнения сельскохозяйственных технологических операций с использованием навешенного сзади орудия и сокращение непроизводительных затрат времени. Указанная задача решается тем, что трактор для гладкой пахоты отвальным плугом содержит остов, несущую его ходовую систему, включающую расположенные попарно спереди и сзади остова четыре колесных движителя, причем передняя пара колесных движителей установлена с возможностью поворота в горизонтальной плоскости для направления движения трактора, а задняя пара колесных движителей снабжена дифференциальным приводом вращения и раздельными тормозами, установленные на остове основной, расположенный сзади, и дополнительный, расположенный спереди, механизмы навешивания технологических машин и орудий с управляемыми гидравлическими приводами их подъема и опускания. Кроме того, трактор снабжен колесным движителем, закрепленным на дополнительном механизме навешивания с возможностью свободного вращения в вертикальной и поворота в горизонтальной плоскостях, при этом оси враще 2 14694 1 2011.08.30 ния и поворота колеса скрещиваются под прямым углом, причем оба механизма навешивания кинематически связаны между собой в противофазе и снабжены устройством разъединения кинематической связи. Дифференциальный привод снабжен устройством вращения колесных движителей задней пары в противоположных направлениях. Перечисленная совокупность существенных признаков позволяет получить следующий технический результат. При выполнении сельскохозяйственных технологических операций, например пахоты отвальным плугом, трактор совершает прямолинейные рабочие ходы так, чтобы изъездить всю поверхность поля всякий раз со смещением на рабочую ширину захвата плуга. В конце поля он должен переориентироваться на движение в обратном направлении. Ширина участков по краям поля должна быть минимальной, так как из-за постоянных маневров трактора почва на нем переуплотняется и истирается движителями и поэтому малопродуктивна. Изобретение позволяет максимально улучшить поворачиваемость трактора на загонах - выполнять повороты с минимальным радиусом и без излишних затрат времени, которые, естественно, являются непроизводительными. Особенно это необходимо при выполнении пахоты, называемой гладкой, когда трактор должен совершать рабочий ход в обратном направлении вплотную рядом с только что выполненным рабочим ходом и с оборотом пласта почвы в том же направлении. Поверхность поля при этом остается ровной, и непроизводительные переезды трактора на загонах минимальны. Минимизировать радиус поворота трактора позволяет опирание его передней части на пятый колесный движитель, имеющий возможность самоустанавливаться в направлении движения, а поворачивающий момент создавать за счет раздельного притормаживания или привода задних колесных движителей в противоположных направлениях. Для установки пятого колесного движителя предложено использовать передний навесной механизм для сельхозмашин и орудий, не используемый на пахоте. Минимизировать затраты времени на поворот трактора позволяет кинематическая связь переднего навесного механизма с задним, благодаря которой при подъеме плуга в конце гона одновременно передняя часть трактора опирается на пятый колесный движитель, позволяя передней паре колесных движителей терять контакт с опорной поверхностью, и трактор получает возможность крутого поворота за счет указанного управления приводом задней пары колес,который тут же осуществляют. При опускании плуга в рабочее положение пятый колесный движитель поднимается, позволяя передней части трактора опереться на переднюю пару колесных движителей и развивать им дополнительную в тяговом балансе трактора силу тяги. Возможность реализации предлагаемого технического решения проиллюстрирована на фиг. 1, 2 и 3 приведены относящиеся к изобретению элементы конструкции сельскохозяйственного трактора при виде сбоку соответственно при поднятых в нерабочее транспортное положение сельхозорудии (плуге) и пятом колесном движителе, при опущенном в рабочее положение сельхозорудии и остающемся в поднятом положении пятом колесном движителе и при опирании передней части трактора на пятый колесный движитель и вновь поднятом в нерабочее положение сельхозорудии на фиг. 4 приведена конструкция заднего навесного механизма трактора для сельхозмашин и орудий при виде сверху на фиг. 5 и 6 приведена конструкция пятого колесного движителя сдвоенной конструкции при виде сбоку в разрезе по поворотной опоре и при виде спереди соответственно на фиг. 7 приведены элементы управляемой гидросистемы привода подъемом и опусканием механизмов для навешивания машин и орудий на фиг. 8, 9 и 10 приведены кинематические схемы привода колесных движителей трактора первая - с возможностью затормаживания одного из задних движителей, но без привода передних, вторая - то же, что и первая, но полноприводная, третья - с возможностью вращения движителей задней пары в разных направлениях фиг. 11 и 12 схематично иллюстрируют принцип работы трактора при прямолинейном движении и на повороте без использования пятого колесного движи 3 14694 1 2011.08.30 теля фиг. 13, 14 и 15 схематично иллюстрируют крутой поворот трактора влево с использованием пятого колесного движителя соответственно при затормаживании левого колесного движителя задней пары, при вращении движителей задней пары в противоположных направлениях и при затормаживании правого колесного движителя на фиг. 16 схематично изображено использование изобретения при выполнении трактором в агрегате с оборотным плугом гладкой пахоты на фиг. 17 и 18 схематически проиллюстрирован разворот трактора соответственно при вращении колесных движителей задней пары в противоположных направлениях и при вращении левого колесного движителя задней пары назад при одновременно заторможенном правовом колесном ее движителе. Трактор содержит остов 1, несущую его ходовую систему, состоящую из расположенных попарно спереди и сзади трактора четырех колесных движителей 2, 3, 4 и 5, причем передняя пара движителей 2 и 3 установлена с возможностью поворота в горизонтальной плоскости для направления движения трактора, а задняя 4 и 5 - снабжена дифференциальным приводом 6 их вращения и раздельными дисковыми фрикционными тормозами 7 и 8 с гидравлическим управлением (фиг. 1, 8 и 9). Дифференциальный привод 6 состоит из ведущей 9 и ведомой 10 конических шестерен,образующих центральную передачу. Установлена ведомая шестерня 10 на вращающемся корпусе 11. Внутри этого корпуса установлены две полуосевые конические шестерни 12 и 13, соосные геометрической оси вращения самого корпуса 11, и находящиеся с ними в зацеплении конические шестерни-сателлиты 14, которые расположены на равных удалениях друг от друга (по количеству их может быть 3 или 4). Указанные шестерни и вращающийся корпус 11 образуют дифференциальный зубчатый механизм, предназначенный для деления крутящего момента поровну между левым 4 и правым 5 задними колесными движителями. Чтобы полностью или частично лишить дифференциальный механизм этого свойства в корпусе 11 установлена гидравлически управляемая дисковая фрикционная муфта 15,которая при необходимости позволяет блокировать полностью правую полуосевую шестерню 13 с корпусом 11, заставив вращаться совместно их, вторую полуосевую шестерню 12 и сателлиты 14 как единое целое, или обеспечивать их относительное проворачивание по достижении определенного регулируемого по величине муфтой 15 крутящего момента момента блокирования дифференциального механизма. Полуосевые шестерни 12 и 13 связаны полуосями 16 и 17 с бортовыми планетарными зубчатыми механизмами 18 и 19, обеспечивающими передачу крутящего момента, многократно увеличенного, непосредственно задним ведущим колесным движителям 4 и 5. Бортовые зубчатые механизмы состоят из солнечных цилиндрических шестерен 20 и 21, непосредственно связанных с полуосями 16 и 17, находящихся с ними в зацеплении сдвоенных зубчатых шестерен-сателлитов 22 и 23, посаженных на водила 24 и 25, и коренных цилиндрических шестерен 26 и 27, также находящихся в зацеплении с шестернями-сателитами 22 и 23 соответственно. Водила 24 и 25, несущие шестерни-сателлиты 22 и 23,установлены на полуосях 28 и 29 задних ведущих движителей 4 и 5. Раздельное торможение колес обеспечивается указанными фрикционными дисковыми гидравлически управляемыми тормозами 7 и 8, блокирующими при необходимости полуоси 16 и 17 с остовом 1 трактора и тем самым останавливающими передачу вращения на колесные движители - на один из них или оба сразу. Источником крутящего момента для приведения трактора в движение служит двигатель 30, как правило, внутреннего сгорания с воспламенением топливной смеси от сжатия дизельный. Скорость создаваемого им вращательного движения, прежде чем передаться на ведущую шестерню 9 центральной передачи, регулируется коробкой перемены передач 31,с которой двигатель 30 связан через управляемую фрикционную муфту 32 - главное сцепление. Коробка перемены передач 31 обеспечивает регулирование скорости движения трактора. 4 14694 1 2011.08.30 Передняя пара колесных движителей 2 и 3 может быть ведомой (фиг. 8) или также ведущей, как и задняя (фиг. 9). В том и другом случае она служит для направления движения трактора, и поэтому каждый ее движитель 2 и 3 установлен на несущей поперечной балке 33 с возможностью поворота в горизонтальной плоскости. Возможность поворота обеспечивается шарнирами 34 и 35, посредством которых оси 36 и 37 колес связаны с концами балки 33. Средней частью балка 33 установлена на остове 1 трактора посредством продольного шарнира 38, обеспечивающего ее свободное качание в вертикальной поперечной плоскости при копировании движителями неровностей рельефа опорной поверхности. Поворотные части шарниров 34 и 35 кинематически связаны между собой шарнирным механизмом - рулевой трапецией 39, обеспечивающей определенную относительную геометрию поворота движителей 2 и 3. Сам же поворот при необходимости обеспечивается силовым цилиндром 40, связанным с рулевой трапецией 39. Он же обеспечивает и удержание колес в нужном положении. В случае когда передние колесные движители 2 и 3 являются ведущими (фиг. 9), в несущей поперечной балке 33, выполненной полой, расположены элементы их привода дифференциальный механизм 41, который так же, как и привод задней пары движителей,состоит из центральной передачи, образованной ведущим 42 и ведомым 43 коническими зубчатыми колесами, вращающегося корпуса 44, расположенных внутри него полуосевых конических шестерен 45 и 46 и связывающих их конических шестерен-сателлитов 47. Полуоси 48 и 49 и кардановые шарниры 50 и 51 связывают дифференциальный механизм с поворотными направляющими колесными движителями 2 и 3. Подвод крутящего момента к ведущей шестерне 42 от выходного вала 52 коробки перемены передач 31 осуществлен через пару шестерен 53, продольный вал 54, фрикционную управляемую муфту 55, карданный вал 56. Дифференциальный механизм 41 передней пары колесных движителей 2 и 3 выполнен самоблокирующимся для повышения их тяговых возможностей. Для этого полуосевые шестерни 45 и 46 опираются на корпус 44 через фрикционные диски 57 и 58. В обратном направлении их отжимают тарированные пружины 59 и 60. В результате момент блокирования дифференциального механизма 41 пропорционален передаваемому им крутящему моменту. На повороте такой момент отсутствует вследствие кинематических расхождений между колесными движителями 2 и 3, 4 и 5 передней и задней пар, и блокирующий момент равен нулю. Это и не препятствует движителям совершать движение по дугам разных радиусов (движители передней пары находятся в забегающем режиме движения). Для реализации привода колесных движителей может быть применена также схема,обеспечивающая поворот трактора вокруг середины задней пары колесных движителей 4 и 5 - точки пересечения геометрических осей 61 и 62 (фиг. 10). Сущность этой кинематической схемы - в обеспечении на повороте вращения задних ведущих колес 4 и 5 в противоположных направлениях. Для этого ведомая шестерня 10 центральной (главной) передачи привода задней пары колесных движителей 4 и 5 не имеет постоянной жесткой связи с вращающимся корпусом 11 дифференциального механизма 6, в отличие от рассмотренных обычных схем. Она связана с ним посредством управляемых фрикционных муфт 63 и 64 и может посредством них,быть как подключенной к корпусу 11, так и отключенной от него. Кроме того, шестерни-сателлиты 14 дифференциального механизма 6 указанными фрикционными муфтами 63 и 64 двухстороннего действия могут быть поочередно подключены к ведомой шестерне 10 центральной передачи и в результате принудительно вращаться то в одном, то в другом направлении при остановленном управляемым фрикционным дисковым тормозным механизмом 65 корпусе 11. Для передачи указанного вращения предназначены конические шестерни 66, связанные с шестернями-сателлитами 14 общими осями вращения 67, и находящиеся с ними в зацеплении конические шестерни 68 5 14694 1 2011.08.30 и 69. Эти шестерни могут поочередно подключаться указанными выше двухсторонними дисковыми фрикционными управляемыми муфтами 63 и 64 непосредственно с ведомой шестерней 10 центральной передачи, обеспечивая указанное принудительное вращение колес 4 и 5 на повороте. При этом дифференциальный эффект привода обеспечиваться не будет. При одновременном подключении шестерен 68 и 69 к шестерне 10 привод задней пары колесных движителей 4 и 5 будет работать в блокированном режиме, то есть также без дифференциального эффекта, но при вращении обоих колесных движителей в одном направлении для прямолинейного движения с высокими тяговыми возможностями. Аналогичное обеспечивается и фрикционной дисковой управляемой блокировочной муфтой 15 во всех приведенных схемах. Использование и того и другого в последней схеме (фиг. 10) увеличивает крутящий момент блокирования привода или же, при прочих равных условиях, позволяет уменьшить необходимые размеры фрикционной муфты 15. На схеме изображены также опоры 70 и 71, в которых установлена поперечная балка 33,несущая переднюю пару колесных движителей 2 и 3, что обеспечивает им возможность копирования неровностей поверхности движения во внедорожных условиях без подрессоривания, как это характерно для конструкций колесных сельскохозяйственных тракторов. На остове 1 трактора 72 (фиг. 1) установлены два механизма навешивания технологических машин и орудий с управляемыми гидравлическими приводами их подъема и опускания. Один механизм - основной 73 - расположен сзади, а второй - дополнительный 74 спереди. Задний механизм навешивания 73 состоит из двух продольных тяг 75 и 76, шарнирно связанных с остовом 1 посредством оси 77, и центральной регулируемой по длине тяги 78,также шарнирно связанной с остовом 1 через кронштейн 79. Для поворота нижних тяг 75 и 76 на оси 77 служит силовой гидравлический цилиндр 80. Его корпус посредством шарнира 81 связан с остовом 1, а шток 82 посредством шарнира 83 - со средним плечом 84 трехплечего рычага 85 (фиг. 1 и 4), все плечи которого собраны на горизонтальной оси 86, обеспечивающей поворотное крепление рычага на остове 1. Два других плеча 87 и 88 рычага 85 разнесены в горизонтальной плоскости, будучи закрепленными на концах оси 86. Концы плеч 87 и 88 шарнирно связаны со средней частью нижних тяг 75 и 76 регулируемыми по длине тягами 89. Тяги 89 представляют собой червячно-винтовой механизм (не изображен), расположенный в корпусе, обеспечивающий легкое выдвижение или втягивание штока 90 при вращении его червяка посредством рукояти 91. Раскосы 90 и 91 удерживают нижние тяги 75 и 76 от боковых колебаний, дополнительно шарнирно связывая их с остовом 1. Сельскохозяйственная машина или орудие 92 (например, оборотный плуг) присоединяется к шарнирам 93, 94 и 95 указанных тяг. Это называют навешиванием машины или орудия на трактор, а сам процесс - агрегатированием. Регулирование угловых положений машины или орудия 92 в продольной плоскости осуществляется удлинением или укорачиванием центральной тяги 78 посредством рукояти 96, а в поперечной плоскости - втягиванием или выталкиванием штоков 90 механизированных тяг 89. Центральную тягу 78 можно еще дополнительно для регулировок переставлять в отверстиях кронштейна 79. Расположенный спереди дополнительный механизм навешивания 74 сельскохозяйственных машин и орудий имеет принципиально схожую конструкцию и кинематику. Он собран на отдельной раме 97, прикрепленной к полураме 98 трактора 72, которая, в свою очередь, прикреплена к остову 1, и также содержит центральную регулируемую тягу 99, нижние тяги 100, связывающие их с трехплечим рычагом 101 регулируемые тяги 102. Силовой цилиндр одним концом (корпусом 103) шарнирно связан с рамой 97, а вторым(штоком 104) - со средним плечом трехплечего рычага 101. 6 14694 1 2011.08.30 Дополнительное крепление рамы 97 к трактору обеспечивается длинной 105 и короткой 106 регулируемыми тягами. Они позволяют также регулировать положение дополнительного механизма навешивания 74 в продольной вертикальной плоскости трактора. К шарнирным концам 107 и 108 тяг 99 и 100 присоединена рама 110, шарнирно связывающая концы этих тяг. Регулирование углового положения рамы 110 в продольной вертикальной плоскости трактора 72 обеспечивают удлинением или укорачиванием центральной тяги 99 посредством вращения ее средней части рукоятью 111 (части тяги связаны с этой целью ходовой резьбой). Кроме того, концы 112 нижних тяг 100 можно вдвигать или выдвигать из основной их части, фиксируя в промежуточных положениях. Регулирование углового положения рамы 110 в поперечной вертикальной плоскости обеспечивают удлинением или укорачиванием тяг 102. На передний механизм навешивания 74, вместо сельхозмашины или орудия, установлен пятый колесный движитель 113 согласно изобретению. Он выполнен самоустанавливающимся в направлении движения, то есть так называемого рояльного типа, и состоит из двух колес, посаженных с возможностью свободного вращения на общую горизонтальную ось 114. Эта ось посредством вилки 115 закреплена на нижнем конце вертикальной оси 116 таким образом, что обе оси скрещиваются под прямым углом и смещены на расстояние(фиг. 5). Ось 116 установлена в цилиндрической опоре 117 посредством двух радиальноупорных подшипников 118 и 119 и удерживается от выпадения гайкой 120. Внутреннее подшипниковое пространство опоры закрыто сверху глухой крышкой 121, а снизу - проходной крышкой 122 с подвижным уплотнением 123. Кронштейнами 124 и 125 опора 117 прикреплена к несущей ее раме 109. Оба навесных механизма, согласно изобретению, кинематически связаны в противофазе тягами 126, шарнирно присоединенными к их нижним тягам 100 и 75 через плечи 127 и 128. Эта кинематическая связь обеспечивает согласованное действие обоих механизмов если тяги 100 и 75 одного из них опускаются, то второго поднимаются, то есть имеет место действие в противофазе (фиг. 2 и 3). При необходимости возможна независимая работа указанных механизмов навешивания 73 и 74. Для этого тягу 126, содержащую в средней части силовой гидравлический цилиндр 129, с его помощью разъединяют, и обе части тяги получают возможность перемещаться независимо. Разъединение тяги осуществляют за счет того, что обе полости цилиндра гидрораспределителем 130 с рабочего места водителя сообщают между собой (правая позиция). В левой позиции золотника гидрораспределитель 130 запирает обе полости силового цилиндра 129 в любом необходимом относительном положении частей тяги 126. Управляется гидрораспределитель рукоятью 131 (фиг. 1-3). Гидравлическая система (фиг. 7) управления гидравлическими силовыми цилиндрами 80 и 103 состоит из источника давления рабочей жидкости - насоса 132 со сливом 133 и предохранительным клапаном 134, трех- и четырехпозиционных распределителей 135 и 136 соответственно с рукоятями переключения 137 и 138, расположенными в кабине трактора 72. Работает устройство следующим образом. Устройство рекомендуется использовать, в частности, при выполнении такой сельскохозяйственной энергоемкой технологической операции, как пахота отвальным плугом,характеризующейся небольшой шириной захвата, а следовательно, частыми поворотами на загонах с необходимым минимальным радиусом поворота и отсутствием сельхозорудия на переднем навесном механизме. Ширина захвата плуга, как правило, для трактора среднего класса может составлять 1,4 м или чуть больше. Обычный трактор совершить такой крутой поворот при выполнении гладкой пахоты, когда он для выполнения рабочего 7 14694 1 2011.08.30 хода в обратном направлении должен вернуться в ту же борозду, которую только что проложил последним корпусом плуга, без дополнительного маневрирования на ограниченном,как правило, по ширине загоне не в состоянии. И на это необходимы дополнительные непроизводительные затраты времени, да и ширину загонов желательно иметь как можно уже, так как почва на отводимых под них полосах по краям полей переуплотняется и истирается ходовой системой трактора, имеет нарушенную структуру, плохую воздухопроницаемость и, как следствие, малоурожайна. Устройство позволяет существенно минимизировать указанные недостатки следующим образом. При выполнении прямолинейного рабочего хода сельскохозяйственное орудие 92,например плуг, заглублено в почву посредством опускания вниз нижних тяг 75 и 76 силовым гидравлическим цилиндром 80 через трехплечий рычаг 85 и тяги 89 (фиг. 2). Для этого воздействуют посредством рукояти 138 на гидрораспределитель 136 (фиг. 7),переключив его последовательно в одну правую позицию, а затем - в крайнюю правую,когда орудие 92 заглубится, обеспечив его плавающее положение для копирования рельефа поля. Пятый колесный движитель 113 при этом удерживается навесным механизмом 74 в поднятом положении благодаря тому, что концы его нижних тяг 112 подняты. Это обеспечивается их поворотом по часовой стрелке тягой 126, кинематически связывающей указанные тяги 112 с тягами 75 и 76 (фиг. 2). Силовой цилиндр 103 переднего навесного механизма 74 не препятствует этому повороту, так как распределитель 135, который управляет этим силовым цилиндром, переключен в крайнюю левую позицию, сообщающую полости цилиндра между собой и свободное перетекание рабочей жидкости (фиг. 7). Тяга 126 обеспечивает описанную кинематическую связь нижних тяг обоих навесных механизмов при условии, что обе полости силового цилиндра 129 будут заперты гидравлическим распределителем 130, переключенным посредством рукояти 131 в крайнюю левую позицию (фиг. 2). Прямолинейное движение трактора при выполнении рабочего при этом обеспечивается парой передних направляющих колесных движителей 2 и 3 (фиг. 11), которые поворачиваются и удерживаются в нужном положении силовым гидравлическим цилиндром 40 через рулевую трапецию 39 (фиг. 8-10). Вращение движителей 4 и 5 для приведения трактора 72 в движение и развитие тяговых касательных усилий Рзл и Рзп обеспечивает двигатель 30, как правило внутреннего сгорания с воспламенением топливной смеси от сжатия - дизельный. Обеспечиваемый им крутящий момент управляемой фрикционной муфтой 32 - главным сцеплением - передается на коробку перемены передач 31 и далее на ведущую шестерню 9 центральной передачи (фиг. 8-10). Приводимая этим во вращение ее ведомая шестерня 10 вращает корпус 11 зубчатого дифференциального механизма 6. Вместе с корпусом вращаются как одно целое, при включенной управляемой фрикционной муфте 15, шестерни-сателлиты 14 и находящиеся с ними в зацеплении полуосевые шестерни 12 и 13 и полуоси 16 и 17 с солнечными шестернями 20 и 21 планетарных зубчатых передач 18 и 19. Оба фрикционных тормозных механизма 7 и 8 при этом отключены и не препятствуют описанному вращению. Далее вращение передается на сдвоенные шестерни-сателлиты 22 и 23. При вращении шестерни-сателлиты 22 и 23 обегают вокруг солнечных шестерен 20 и 21, что обеспечивается благодаря нахождению с ними в зацеплении также коренных шестерен 26 и 27 планетарных механизмов 18 и 19. Совершая указанное так называемое планетарное движение, шестерни-сателлиты 20 и 21 вращают водила 24 и 25, а через полуоси 28 и 29 колесные движители 4 и 5 с гораздо меньшей скоростью, чем вращаются полуосевые шестерни 16 и 17, но с возросшим в той же мере крутящим моментом для обеспечения движителями высоких тяговых усилий при сцеплении с опорной поверхностью - грунтом (почвой). 8 14694 1 2011.08.30 Регулирование скорости передвижения трактора 72 обеспечивается при помощи коробки перемены передач 31, которая для этого предназначена. Для осуществления перемены передачи коробку 31 кратковременно отключают от двигателя 30 посредством муфты сцепления 32. Для увеличения тяговых возможностей трактора через управляемую фрикционную муфту 55 (фиг. 9 и 10) к двигателю 30 подключают пару передних колесных движителей 2 и 3, которые развивают дополнительные тяговые касательные усилия пл и пп. При этом вращение от выходного вала 52 коробки перемены передач 31 передается через шестерни 53, вал 54, карданный вал 56, ведущую 42 и ведомую 43 шестерни главной передачи зубчатого дифференциального механизма 41, его корпус 44 и далее через вращающиеся с ним за одно целое шестерни-сателлиты 47, полуосевые шестерни 45 и 46, полуоси 48 и 49,кардановые шарниры 50 и 51, оси 36 и 37 на колесные движители 2 и 3 передней пары. Дифференциальный механизм 41 передней пары колес 2 и 3 выполнен самоблокирующимся. Это обеспечивается тем, что полуосевые шестерни 45 и 46 опираются в осевом направлении на корпус через фрикционные муфты 57 и 58, воспринимающие осевое усилие, возникающее в зацеплении с ними шестерен-сателлитов 47 при передаче крутящего момента. Чем больше передаваемый крутящий момент, тем больше так называемый коэффициент блокирования дифференциального механизма 41. При отключении муфтой 55 подвода крутящего момента на переднюю пару колесных движителей 2 и 3, например, для совершения беспрепятственного поворота трактора 72 коэффициент блокирования становится равным нулю, так как сжатие дисков фрикционных муфт 57 и 58 со стороны полу осевых шестерен 45 и 46 отсутствует, а пружины 59 и 60 даже напротив - разжимают их. Так привод колесных движителей 4 и 5, 2 и 3 работает при совершении трактором 72 прямолинейных рабочих ходов. На фиг. 12 схематически проиллюстрирован поворот трактора с использованием передней пары колесных движителей 2 и 3, когда в повернутом положении на них действуют боковые реакции пл и пп. Угол поворота этих движителей ограничен, и поэтому поворот трактора возможен только с большим радиусом пов (здесь и далее в качестве радиуса поворота трактора принят радиус траектории движения наиболее удаленного колеса, определяющего коридор движения трактора, важный с точки зрения решаемой данным изобретением задачи). В конце гона, когда необходимо совершить крутой разворот трактора для движения в обратном направлении, переключив распределитель 136 в крайнюю левую позицию(фиг. 7), орудие 92 выглубляют и поднимают в верхнее положение (фиг. 3), после чего обе полости силового цилиндра 80 запирают, переключив распределитель 136 во вторую позицию слева (фиг. 7). В процессе подъема орудия нижние тяги 75 и 76 тягами 89 поворачиваются против часовой стрелки. Через тягу 126 они поворачивают в том же направлении и нижние тяги 112. В результате несомый ими пятый колесный движитель 113 переместится вниз, обопрется на опорное основание (поверхность поля) и приподнимет над ним переднюю пару колесных движителей 2 и 3 (фиг. 3). В таком положении движителей 2, 3 и 113 поворот трактора 72 возможен только или за счет торможения одного из движителей 4 или 5 - движителя, расположенного с той стороны, в которую необходимо совершить поворот (фиг. 13), или за счет вращения колесных движителей 4 и 5 в противоположных направлениях (фиг. 13). При этом поворот возможен в коридоре движения с минимальным радиусом пов в первом случае - вокруг точки 139 в центре давления (пятна контакта с поверхностью поля) остановленного движителя (фиг. 13), во втором - вокруг точки 140 пересечения геометрических осей 61 и 62,расположенной между движителями 4 и 5 (фиг. 14). Еще меньшим радиус пов поворота будет, если остановить движитель задней пары, расположенный с противоположной направлению поворота стороны трактора, а другой движитель этой пары привести во вращение в обратном направлении, характерном для движения назад (фиг. 15). 9 14694 1 2011.08.30 Таким образом, возможны три схемы поворота трактора при его опирании на пятый колесный движитель 113. По первой схеме (фиг. 13) поворота, например, влево дисковым фрикционным тормозом 7 (фиг. 8 и 9) останавливают левый колесный движитель 4. В результате шестернисателлиты 14 будут обкатываться по остановленной полуосевой конической шестерне 12,удвоив скорость вращения полуосевой шестерни 13, а следовательно, и правого колесного движителя 5. Колесный движитель 5, развивая касательную силу тяги зп, будет обегать удерживаемый тормозом 7 колесный движитель 4, поворачивая влево весь трактор 72(фиг. 13). При этом блокировочная дисковая фрикционная муфта 15 не препятствует описанной работе привода колесного движителя 5, так как отключается на время совершения поворота (фиг. 8 и 9). Пятый колесный движитель 113, благодаря шарнирной установке его вертикальной оси 116 в цилиндрической опоре 117 посредством двух радиальноупорных подшипников 118 и 119 с возможностью самоустанавливаться в направлении движения (фиг. 5), обеспечиваемом смещением(по типу рояльного колеса), не будет препятствовать повороту трактора таким образом. Оба колеса движителя 113 при этом свободно вращаются на горизонтальной оси 114, и поворот осуществляется с минимальным радиусом пов вокруг точки 139, расположенной в центре давления (пятна контакта с поверхностью поля) остановленного движителя 4 (фиг. 13). По второй схеме поворота (фиг. 14) движители 4 и 5 заставляют вращаться в противоположных направлениях и развивать разнонаправленные касательные тяговые усилия зл и зп, которые обеспечивают поворачивающий момент в плоскости движения трактора. Для этого одной из фрикционных муфт 63 или 64 соединяют коническую шестерню 68 или 69 с ведомой шестерней 10 главной передачи, а корпус дифференциального механизма 11 блокируют от вращения фрикционным дисковым тормозом 65 (фиг. 10). В результате шестерни-сателлиты 14 будут принудительно вращаться через сидящие с ними на одном валу шестерни 66 в одном или в другом направлении в зависимости от того, какая из упомянутых шестерен 68 или 69 будет соединена с ведомой шестерней 10 главной передачи. Движители 4 и 5 задней пары будут вращаться один в одном направлении, другой в другом, создавая указанный поворачивающий момент на трактор 72 для поворота вправо или влево, в общем, куда необходимо. При этом блокировочная дисковая фрикционная муфта 15 не препятствует описанной работе привода колесных движителей 4 и 5, так как отключается на время совершения поворота. Дисковые фрикционные тормоза 7 и 8 при этом оба также отключены, естественно. Пятый колесный движитель 113, благодаря описанной возможности самоустанавливаться в направлении движения (фиг. 14), не будет препятствовать повороту трактора таким образом. Поворот будет происходить вокруг геометрической точки 140, расположенной между движителями 4 и 5 посередине(фиг. 14). По третьей схеме (фиг. 15) поворота, например, также влево дисковым фрикционным тормозом 8 останавливают правый колесный движитель 5 (фиг. 8 и 9) и включают посредством коробки перемены передач 30 задний ход, изменяя на противоположное вращение ведущей шестерни 9 главной передачи и всех других связанных с ней шестерен. В результате шестерни-сателлиты 14 будут обкатываться по остановленной полуосевой конической шестерне 13 в противоположном, как указывалось, направлении, удвоив скорость противоположного вращения полуосевой шестерни 11 и, следовательно, левого колесного движителя 4. Колесный движитель 4 будет обегать задним ходом удерживаемый тормозом 8 колесный движитель 5, поворачивая, как и в первом случае, весь трактор 72 также влево за счет тягового касательного усилия Рзл, направленного назад (фиг. 15). При этом блокировочная дисковая фрикционная муфта 15 не препятствует описанной работе привода колесного движителя 4, так как отключается на время совершения поворота (фиг. 8 и 9). Пятый колесный движитель 113, благодаря шарнирной установке его вертикальной оси 116 в цилиндрической опоре 117 посредством двух радиально-упорных подшипников 118 и 119 10 14694 1 2011.08.30 с возможностью самоустанавливаться в направлении движения (фиг. 5), обеспечиваемом смещением(по типу рояльного колеса), не будет препятствовать повороту трактора таким образом. Оба колеса движителя 113 при этом свободно вращаются на горизонтальной оси 114. Этот поворот осуществляется с таким же, как и в первом случае, минимальным радиусом пов, но уже вокруг точки 141, расположенной в центре давления (пятна контакта с поверхностью поля) остановленного движителя 5 (фиг. 15). На фиг. 16 схематически представлено использование пятого колесного движителя для переориентации движения трактора в конце гона при выполнении такой необходимой сельскохозяйственной операции, как гладкая пахота отвальным оборотным плугом 92. Штриховыми линиями изображено будущее положение трактора и оборотного плуга после того, как будет совершен поворот вокруг точки 139 за счет использования касательной силы тяги Рзп правого колесного движителя 5 правой задней пары (показаны также касательные тяговые усилия Рзл, Рзп, Рпл и Рпп, которые появятся при включении привода на все движители). Направление поворота трактора показано стрелкой 145, а направление будущего рабочего хода - стрелкой 146. Буквамиобозначена рабочая ширина захвата плуга,причем вп - выполненного только что прямого рабочего хода по - предшествующего обратного рабочего хода и ппп - предшествующего ему прямого рабочего хода Вбо - будущего обратного рабочего хода. Позициями 142 и 143 отмечены борозды, по которым трактор двигался при выполнении предшествующих рабочих ходов, а позицией 144 - борозда, по которой трактор будет двигаться в обратном направлении, и в которые он должен точно попадать при развороте без совершения лишних маневров во избежание излишнего переуплотнения почвы и минимизации непроизводительных затрат времени. Это, как явствует из приведенной схемы, обеспечивается предложенным техническим решением. На фиг. 17 и 18 схематически проиллюстрирован разворот трактора соответственно,при вращении задних колесных движителей 4 и 5 в противоположных направлениях и при вращении левого колесного движителя 4 назад и заторможенном правом колесном движителе 5. В первом случае поворот осуществляется вокруг точки 140, и трактор после разворота займет положение в той же вертикальной плоскости, что и при прямом ходе(фиг. 17), а во втором - вокруг точки 141, и трактор после разворота займет смещенное вправо на ширину его колеи положение (фиг. 18). Та или другая схема поворота может оказаться приемлемой в зависимости от конкретной технологической операции и других условий работы, например в стесненных условиях парников, внутри зданий ферм и др. Источники информации 1. Барский И.Б. Конструирование и расчет тракторов Учебник для вузов по специальности Автомобили и тракторы. - 3-е изд., перераб. и доп. - М. Машиностроение, 1980. . 210-212. 2. Ксеневич И.П. Тракторы МТЗ-100 и МТЗ-102. - М. Агропромиздат, 1986. - . 82-90 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 19
МПК / Метки
МПК: A01B 49/04, B62D 49/06
Метки: пахоты, отвальным, плугом, трактор, гладкой
Код ссылки
<a href="https://by.patents.su/19-14694-traktor-dlya-gladkojj-pahoty-otvalnym-plugom.html" rel="bookmark" title="База патентов Беларуси">Трактор для гладкой пахоты отвальным плугом</a>
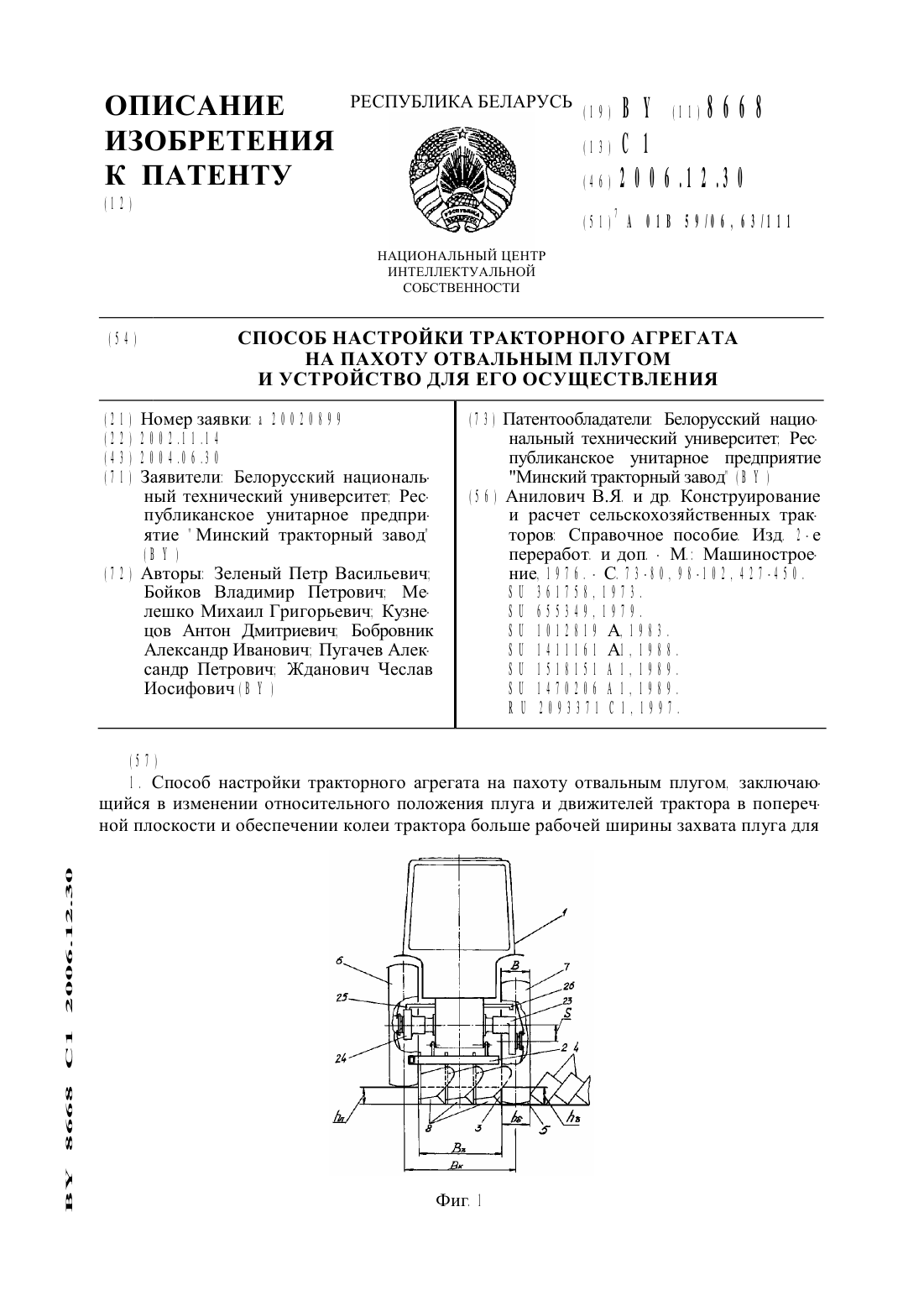
Способ настройки тракторного агрегата на пахоту отвальным плугом и устройство для его осуществления
Номер патента: 8668
Опубликовано: 30.12.2006
Авторы: Бобровник Александр Иванович, Пугачев Александр Петрович, Бойков Владимир Петрович, Жданович Чеслав Иосифович, Кузнецов Антон Дмитриевич, Зеленый Петр Васильевич, Мелешко Михаил Григорьевич
МПК: A01B 63/111, A01B 59/06
Метки: пахоту, отвальным, способ, агрегата, тракторного, осуществления, устройство, плугом, настройки
Текст:
...внешним силам труднее нарушить это устойчивое движение борозда принудительно направляет движение агрегата. не позволяя ему самопроизвольно ни удаляться. ни приближаться относительно вспаханной части поля). Кроме того. навесное агрегатирование придает агрегату более высокие маневреннь 1 е свойства и показатели поворотливости. чем прицепное и полунавесноеОднако даже при таком способе не удается обеспечить вь 1 сокое качество вспашки....
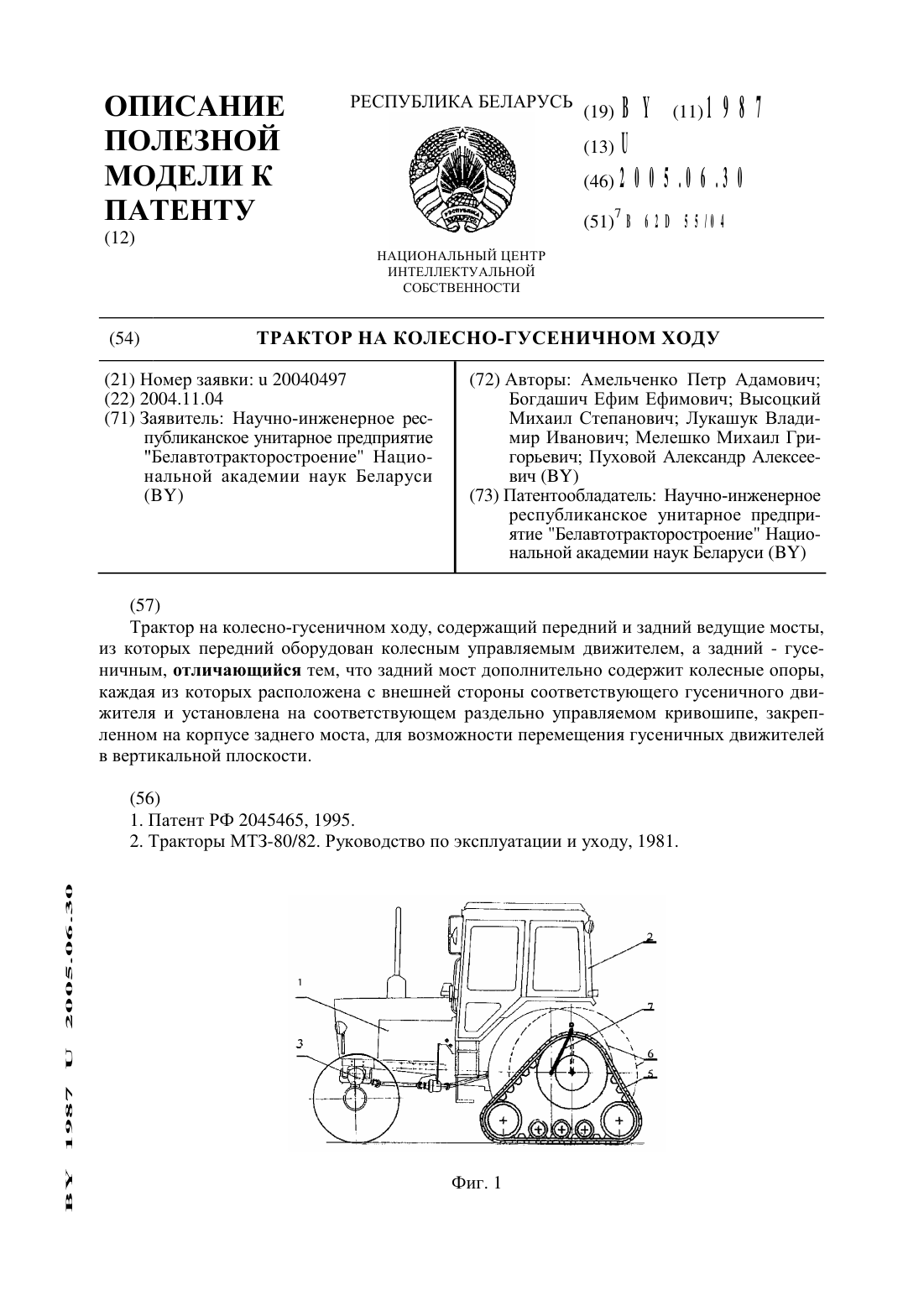
Трактор на колесно-гусеничном ходу
Номер патента: U 1987
Опубликовано: 30.06.2005
Авторы: Высоцкий Михаил Степанович, Богдашич Ефим Ефимович, Амельченко Петр Адамович, Пуховой Александр Алексеевич, Мелешко Михаил Григорьевич, Лукашук Владимир Иванович
МПК: B62D 55/04
Метки: трактор, колесно-гусеничном, ходу
Текст:
...1 х движителях, производить перевод трактора на колесный ход в транспортное положение и устранить перекос трансмиссии на пахоте по схеме колеса в борозде.На фиг. 1 представлена схема трактора на колесно-гусеничном ходу. Фиг. 2 - задний мост в транспортном положении (вид сзади). Фиг. 3 - задний мост в рабочем положении на пахоте (вид сзади).Трактор на колесно-гусеничном ходу состоит из силовой установки 1, муфты сцепления и коробки...
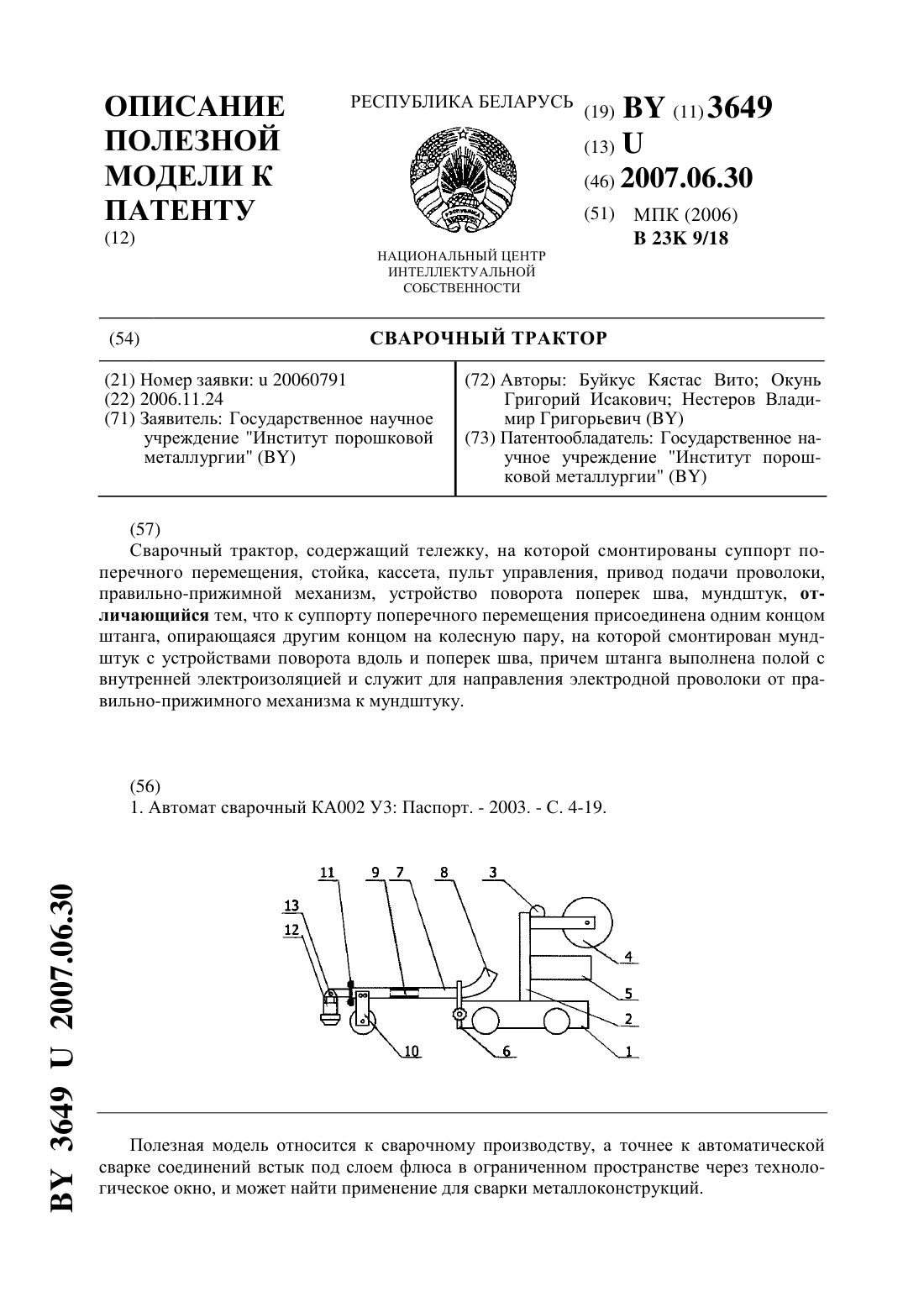
Сварочный трактор
Номер патента: U 3649
Опубликовано: 30.06.2007
Авторы: Окунь Григорий Исакович, Буйкус Кястас Вито, Нестеров Владимир Григорьевич
МПК: B23K 9/18
Текст:
...управления, привод подачи проволоки, правильно-прижимной механизм, устройство поворота поперек шва, мундштук, при этом к суппорту поперечного перемещения присоединена одним концом штанга, опирающаяся другим концом на колесную пару, на которой смонтирован мундштук с устройствами поворота вдоль и поперек шва, причем штанга выполнена полой с внутренней электроизоляцией и служит для направления электродной проволоки от правильно-прижимного...
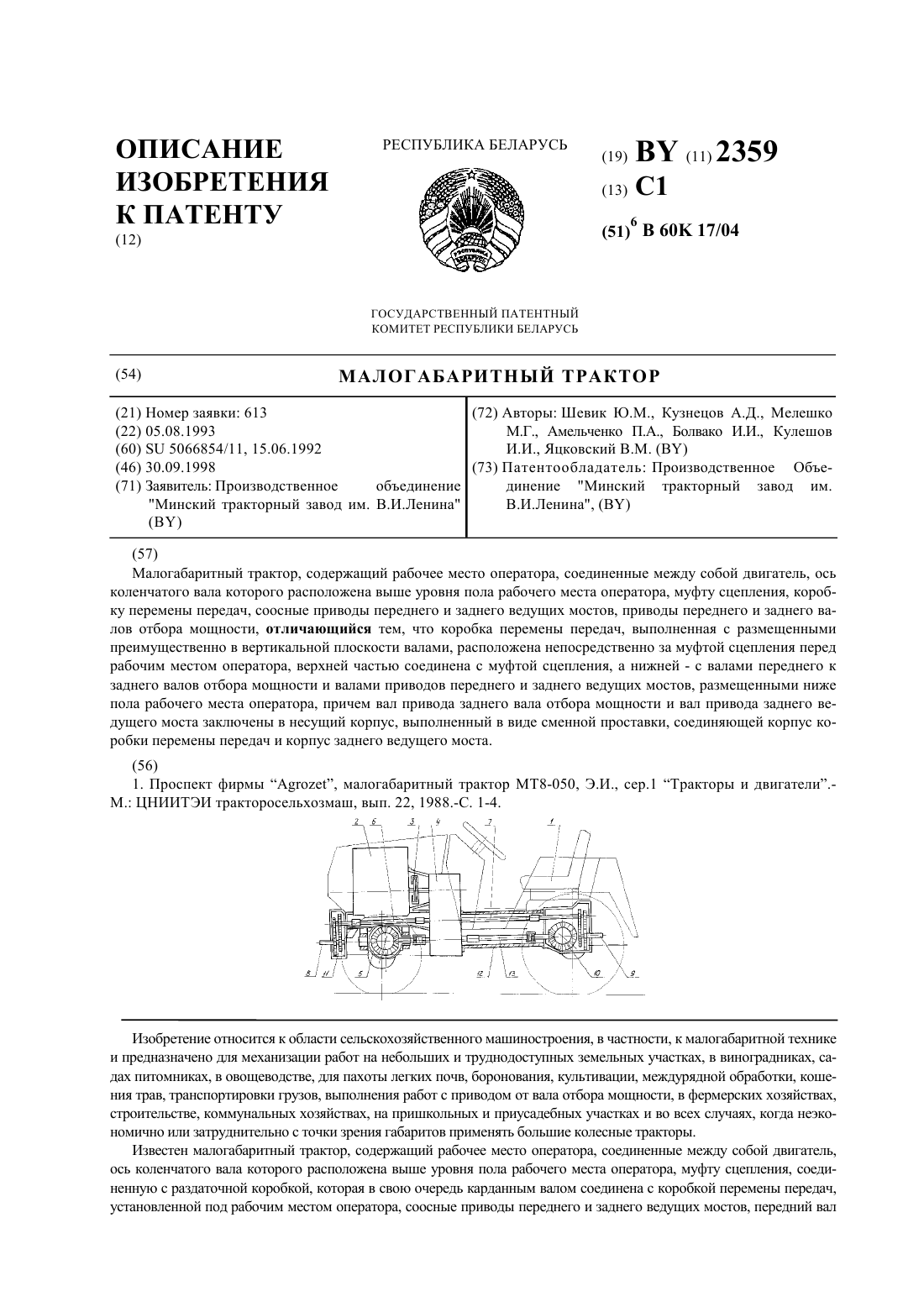
Малогабаритный трактор
Номер патента: 2359
Опубликовано: 30.09.1998
Авторы: Мелешко Михаил Григорьевич, Болвако Иван Иванович, Кузнецов Антон Дмитриевич, Яцковский Виктор Михайлович, Амельченко Петр Адамович, Шевик Юрий Михайлович, Кулешов Иван Иванович
МПК: B60K 17/04
Метки: малогабаритный, трактор
Текст:
...узлов и деталей, карданных соединений, получить различные модификации путем изменения базы трактора. Согласно изобретению малогабаритный трактор содержит рабочее место оператора, соединенные между собой двигатель, ось коленчатого вала которого расположена выше уровня пола рабочего места оператора, муфту сцепления, коробку перемены передач, соосные приводы переднего и заднего ведущих мостов, приводы переднего и заднего валов отбора...
Трактор с газогенератором
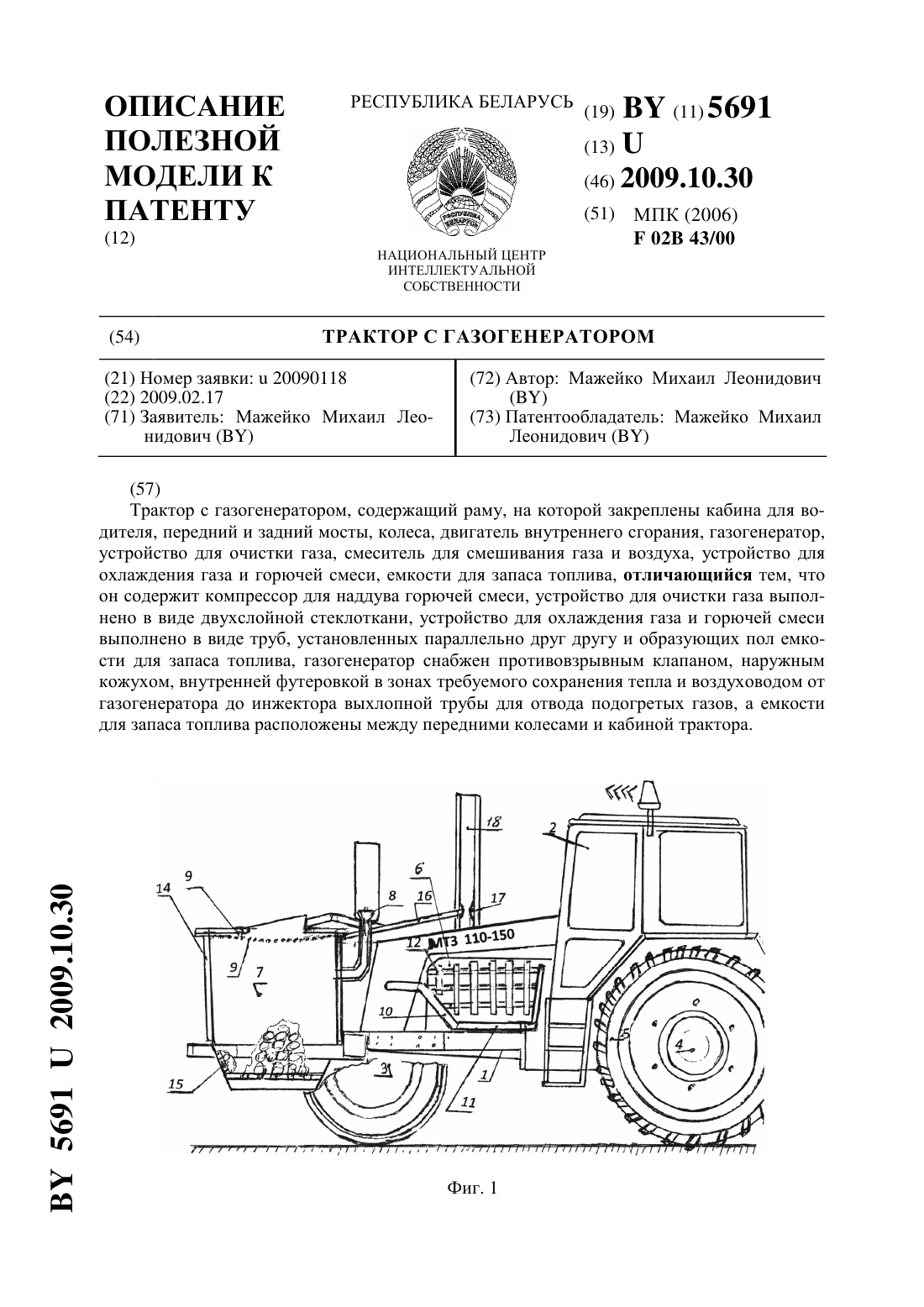
Номер патента: U 5691
Опубликовано: 30.10.2009
Автор: Мажейко Михаил Леонидович
МПК: F02B 43/00
Метки: трактор, газогенератором
Текст:
...задача достигается тем, что трактор с газогенератором содержит раму,на которой закреплены кабина для водителя, передний и задний мосты, колеса, двигатель внутреннего сгорания, газогенератор, устройство для очистки газа, смеситель для смешивания газа и воздуха, устройство для охлаждения газа и горючей смеси, емкости для запаса топлива. При этом трактор содержит компрессор для наддува горючей смеси. Устройство 2 56912009.10.30 для очистки...
Предыдущий патент: Сочлененное транспортное средство
Следующий патент: Устройство для предотвращения раскачивания груза, подвешенного на грузовом канате
Случайный патент: Способ выделения синтетических алмазов