Автоматический захват для штучных грузов
Номер патента: U 3558
Опубликовано: 30.06.2007
Авторы: Агейчик Валерий Александрович, Агейчик Юрий Валерьевич, Шило Иван Николаевич

Текст
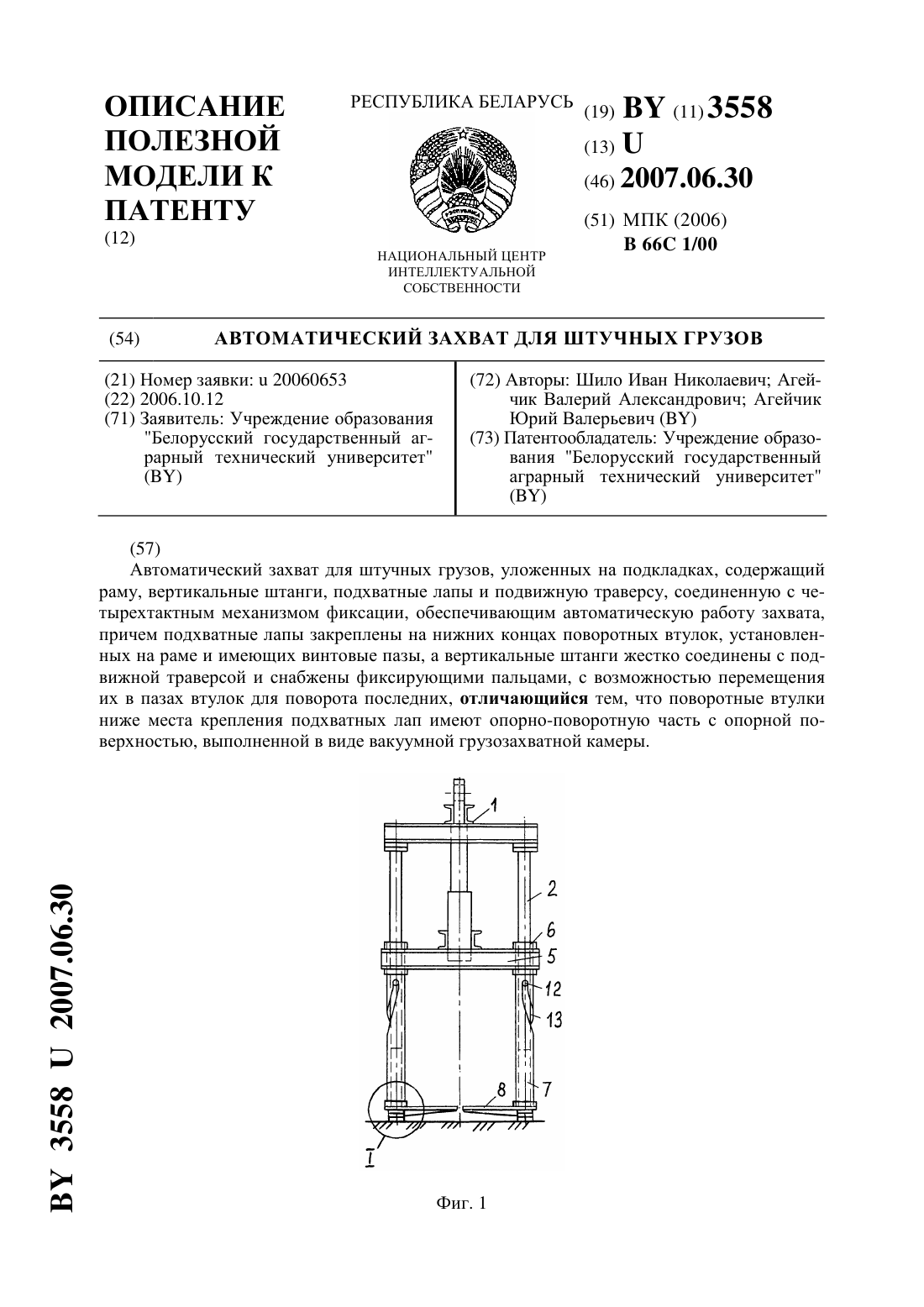
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ(71) Заявитель Учреждение образования Белорусский государственный аграрный технический университет(72) Авторы Шило Иван Николаевич Агейчик Валерий Александрович Агейчик Юрий Валерьевич(73) Патентообладатель Учреждение образования Белорусский государственный аграрный технический университет(57) Автоматический захват для штучных грузов, уложенных на подкладках, содержащий раму, вертикальные штанги, подхватные лапы и подвижную траверсу, соединенную с четырехтактным механизмом фиксации, обеспечивающим автоматическую работу захвата,причем подхватные лапы закреплены на нижних концах поворотных втулок, установленных на раме и имеющих винтовые пазы, а вертикальные штанги жестко соединены с подвижной траверсой и снабжены фиксирующими пальцами, с возможностью перемещения их в пазах втулок для поворота последних, отличающийся тем, что поворотные втулки ниже места крепления подхватных лап имеют опорно-поворотную часть с опорной поверхностью, выполненной в виде вакуумной грузозахватной камеры.(56) 1. А.с. СССР 264650. МПК В 66 С 1/28, 1970. 2. Вайнсон А.А., Андреев А.Ф. Крановые грузозахватные устройства Справочник. М. Машиностроение, 1982. - С. 175-177. 3. Вайнсон А.А., Андреев А.Ф. Крановые грузозахватные устройства Справочник. М. Машиностроение, 1982. - С. 250-254. Полезная модель относится к автоматическим захватам, в частности к автоматическим захватам для штучных грузов, уложенных на подкладках и т.п. Известен автоматический захват для штучных грузов 1, уложенных на подкладках,содержащий раму, вертикальные штанги, подхватные лапы и подвижную траверсу, соединенную с четырехтактным механизмом фиксации, обеспечивающим автоматическую работу захвата, причем подхватные лапы закреплены на нижних концах поворотных втулок,установленных на раме и имеющих винтовые пазы, а вертикальные штанги жестко соединены с подвижной траверсой и снабжены фиксирующими пальцами, перемещающимися в пазах втулок для поворота последних. Такое устройство не обеспечивает в ряде случаев автоматический захват штучных грузов подхватными лапами. Это связано с тем, что поворот подхватных лап и их проникновение под груз может быть осуществлен за счет значительной разности момента от окружной составляющей реакции взаимодействия силы веса поворотной втулки и фиксирующего пальца и момента трения торца поворотной об опорную поверхность, обеспечивающей быстрый поворот поворотной втулки в течение короткого времени нахождения подхватных лап на уровне подкладок с возможностью проникновения между ними. Однако этот процесс осложняется тем, что момент от окружной составляющей реакции взаимодействия силы веса поворотной втулки и фиксирующего пальца в начальный момент равен нулю, а момент трения торца об опорную поверхность наоборот имеет максимальное значение. Несмотря на то, что первый имеет в дальнейшем тенденцию к росту, а второй убывает, вероятность того,что в течение короткого промежутка времени даже при значительной высоте подкладок подхватные лапы успеют повернуться и подхватить груз мала. Задача, которую решает полезная модель, заключается в обеспечении гарантированного автоматического захвата груза подхватными лапами. Поставленная задача решается с помощью автоматического захвата для штучных грузов, уложенного на подкладках, содержащего раму, вертикальные штанги, подхватные лапы и подвижную траверсу, соединенную с четырехтактным механизмом фиксации, обеспечивающим автоматическую работу захвата, причем подхватные лапы закреплены на нижних концах поворотных втулок, установленных на раме и имеющих винтовые пазы, а вертикальные штанги жестко соединены с подвижной траверсой и снабжены фиксирующими пальцами, с возможностью перемещения их в пазах втулок для поворота последних, где поворотные втулки ниже места крепления подхватных лап имеют опорно-поворотную часть с опорной поверхностью, выполненной в виде вакуумной грузозахватной камеры. На фиг. 1 представлена фронтальная проекция, а на фиг. 2 - профильная проекция автоматического захвата для штучных грузов на фиг. 3 показан узелна фиг. 1. Автоматический захват содержит траверсу 1, снабженную, например, четырьмя вертикальными цилиндрическими штангами 2, петлей 3 для подвески к крюку грузоподъемного устройства (на фиг. не показан) и ползуном 4. На раме 5 в подшипниках 6 установлены втулки 7, охватывающие штанги 2 и снабженные подхватными лапами 8. В средней части рамы закреплена пустотелая стойка 9, охватывающая ползун 4, с установленной в ней звездочкой 10. Звездочка 10 совместно с упором 11, приваренным к ползуну 4, и соответствующими прорезями в ползуне 4 и стойке 9 образует известный четырехтактный механизм фиксации 2. На каждой штанге 2 вставлен палец 12, входящий в винтовой паз 13, выпол 2 35582007.06.30 ненный во втулке 7. При этом направления винтовой линии пазов 13 в соседних втулках различны. Ниже места крепления подхватных лап 8 втулки 7 имеют опорно-поворотную часть, выполненную в виде последовательно присоединенных болтовыми соединениями 14 к нижней опорной поверхности втулки 7 внутреннего кольца 15 с расположенными под ним верхних шариковых тел качения 16, наружного кольца 17 с расположенными под ним нижних шариковых тел качения 18, опирающихся на кольцевую нижнюю опорную крышку 19. При этом кольцевая нижняя опорная крышка 19 охватывает проходящее сквозь ее с зазором наружное кольцо 17, которое имеет плоскую круговую опорную поверхность с закрепленным на ней по периферии, например, с помощью клея резиновым кольцом 20, что образует при контакте с бетонной или с другой твердой опорной поверхностью с микронеровностями до 5 мм вакуумную грузозахватную камеру 3. Автоматический захват работает следующим образом. В положении, показанном на чертеже, механизм фиксации разомкнут, траверса находится в верхнем положении, и пальцы 12 упираются в верхние края пазов 13. При этом втулки 7 расположены так, что лапы 8 находятся под грузом. Во время опускания захвата с грузом на опорную поверхность, например бетон или асфальт, первоначально останавливается рама с втулками 7 и лапами 8. Траверса 1 со штангами 2 под действием собственного веса продолжает опускаться, и пальцы 12 разворачивают втулки 7 так, что лапы 8 выходят из под груза. Когда автоматический захват поднимается, его элементы, зафиксированные известным четырехтактным механизмом фиксации 2, остаются в том же положении, и автоматический захват снимается с груза. При опускании автоматического захвата на другой груз механизм фиксации размыкается, и при дальнейшем подъеме траверса 1 со штангами 2 поднимается, а рама 5 с втулками 7 и лапами 8 остается временно на опорной поверхности. Гарантией этого служит образовавшийся в результате деформации, под действием собственного веса автоматического захвата, резиновых колец 20 вакуум под нижними поверхностями наружных колец 17, в результате чего там образуется вакуумная грузозахватная камера, прижимающая нижние части наружных колец 17 к опорной поверхности. При этом пальцы 12 разворачивают втулки 7 так, что лапы 8 снова заводятся под груз. После того, как пальцы 12 упрутся в верхние края пазов 13, грузоподъемное устройство преодолевает присасывающие усилия вакуумных камер под нижними поверхностями наружных колец 17 и автоматический захват с грузом поднимается. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 3
МПК / Метки
МПК: B66C 1/00
Метки: захват, грузов, штучных, автоматический
Код ссылки
<a href="https://by.patents.su/3-u3558-avtomaticheskijj-zahvat-dlya-shtuchnyh-gruzov.html" rel="bookmark" title="База патентов Беларуси">Автоматический захват для штучных грузов</a>
Захват пилы
Номер патента: U 35
Опубликовано: 30.06.1999
Авторы: Зотов Анатолий Валентинович, Кореневский Валерий Степанович, Коноплев Петр Васильевич, Алейников Александр Евгеньевич
МПК: B27B 3/32
Текст:
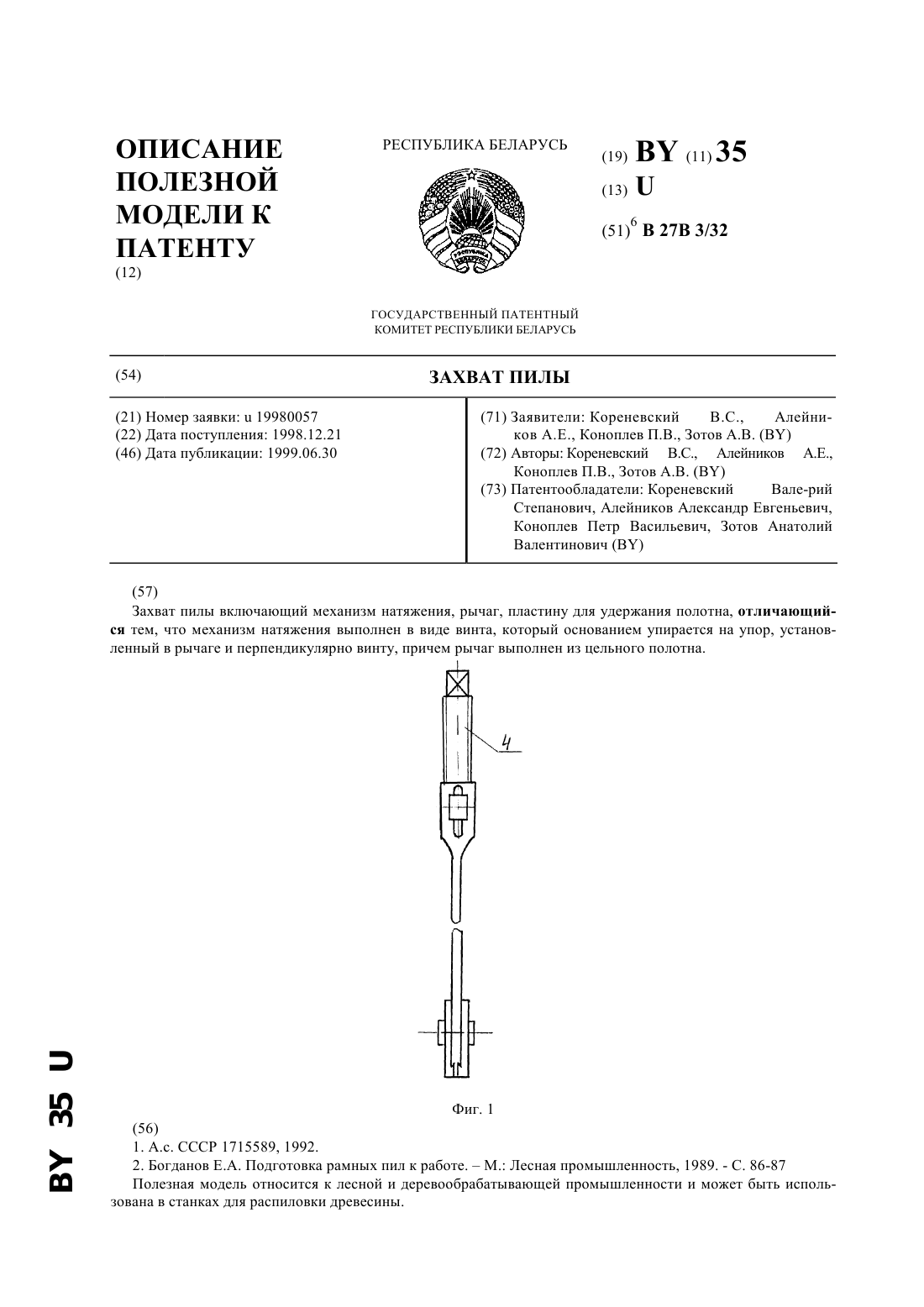
...древесины, что снижает долговечность пил. Осуществляя удары по клиньям в процессе натяжения, снижается долговечность механизмов привода, шарниров. Задачей является повышение долговечности пил, а также механизмов привода, шарниров. Поставленная задача решается так, что в захвате пилы включающим механизм натяжения, рычаг, пластину для удержания полотна, механизм натяжения выполнен в виде винта, который основанием упирается на упор, установленный...
Захват для крепления резинотросовых лент и канатов при испытаниях на разрывной гидравлической машине

Номер патента: U 244
Опубликовано: 30.03.2001
Авторы: Прушак Нина Владимировна, Дворник Александр Петрович, Щерба Татьяна Павловна, Белько Сергей Леонидович, Барановский Анатолий Леонидович, Конопляник Алла Владимировна
МПК: G01N 3/04
Метки: разрывной, испытаниях, резинотросовых, канатов, лент, захват, машине, крепления, гидравлической
Текст:
...лент и канатов при испытаниях на разрывной гидравлической машине, содержащий неподвижную и подвижную зажимные части,размещенные между ними последовательно устанавливаемые вдоль зажимной поверхности неподвижной части элементы, вокруг которых запасовывается испытываемый образец, причем подвижная зажимная часть выполнена в виде рычага с прикрепленной к нему болтами сферической опорой, одним концом рычаг шарнирно крепится к стойке неподвижной...
Захват для крепления резинотросовых лент и канатов при испытаниях на разрывной гидравлической машине
Номер патента: 8102
Опубликовано: 30.06.2006
Авторы: Белько Сергей Леонидович, Конопляник Алла Владимировна, Прушак Нина Владимировна, Барановский Анатолий Леонидович, Дворник Александр Петрович, Щерба Татьяна Павловна
МПК: G01N 3/04
Метки: гидравлической, крепления, резинотросовых, лент, канатов, разрывной, захват, машине, испытаниях
Текст:
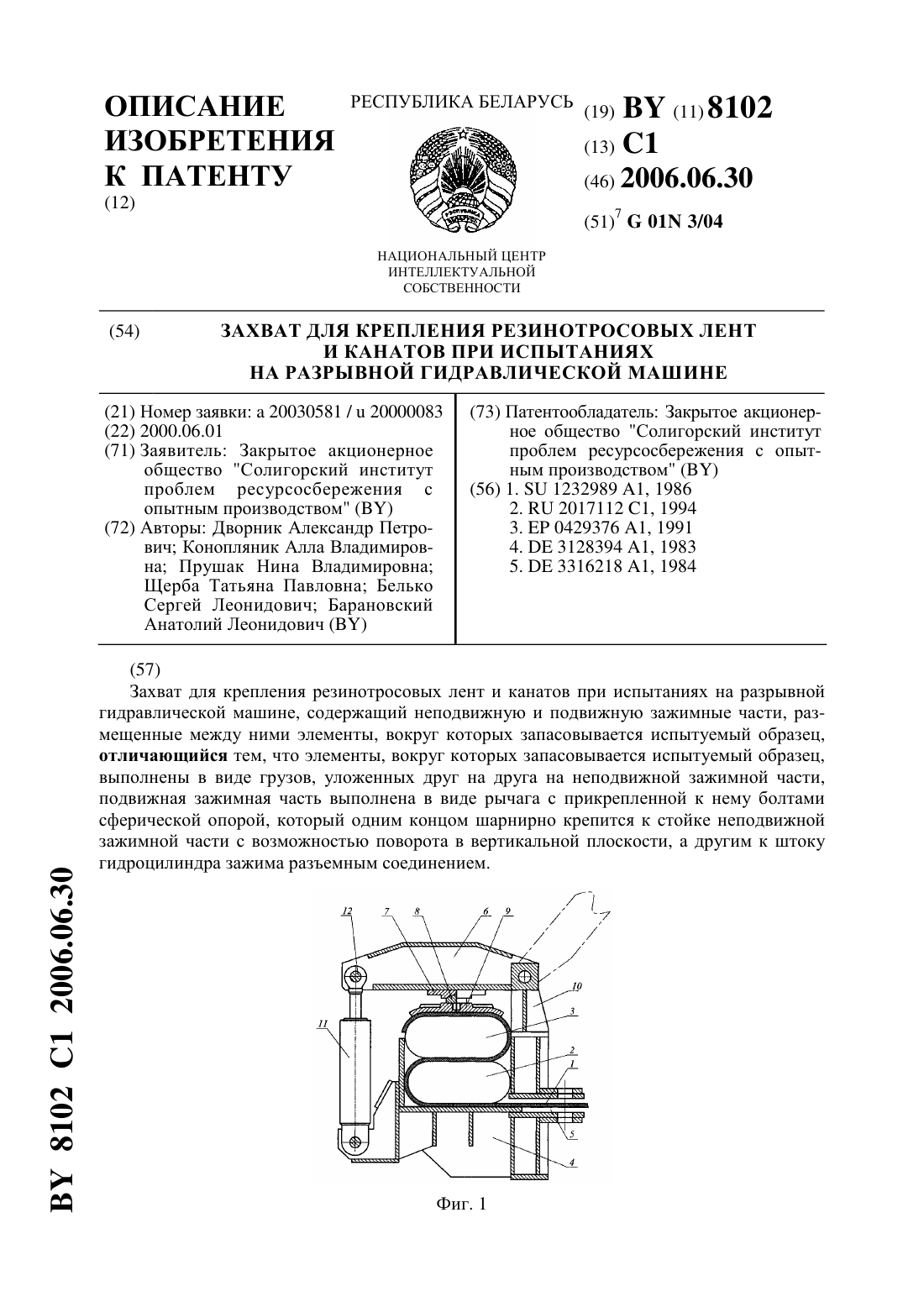
...и канатов при испытаниях на разрывной гидравлической машине, содержащий неподвижную и подвижную зажимные части, размещенные между ними элементы, выполненные в виде грузов, уложенных друг на друга на неподвижной зажимной части, и вокруг которых запасовывается испытуемый образец, причем подвижная зажимная часть выполнена в виде рычага с прикрепленной к нему болтами сферической опорой, который одним концом шарнирно крепится к стойке...
Захват для брёвен
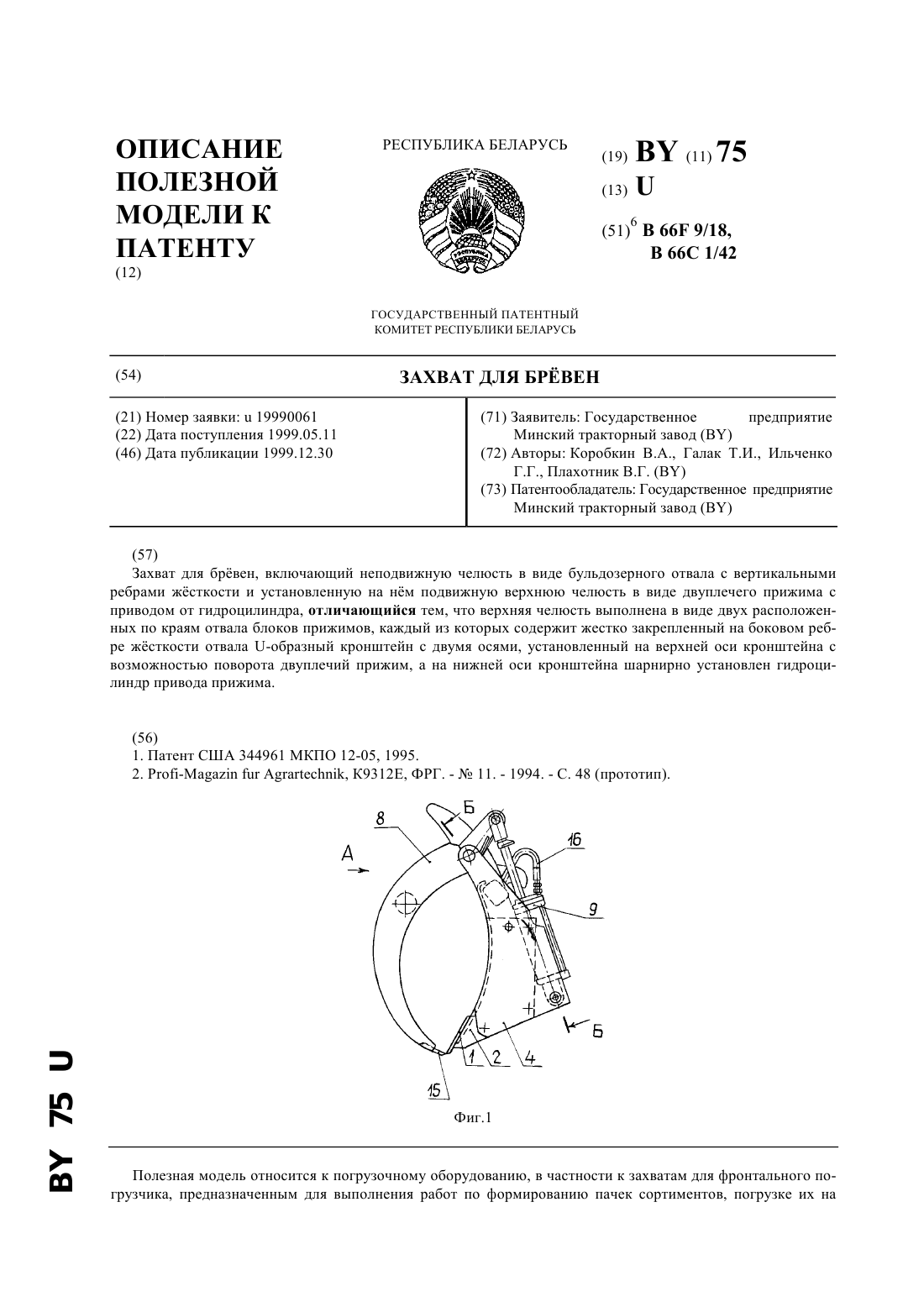
Номер патента: U 75
Опубликовано: 30.12.1999
Авторы: Коробкин Владимир Андреевич, Плахотник Василий Григорьевич, Галак Тамара Иосифовна, Ильченко Георгий Георгиевич
Текст:
...из которых содержит жестко закрепленный на боковом ребре жсткости отвала -образный кронштейн с двумя осями, установленные с возможностью поворота на верхней оси кронштейна двуплечий прижим, а на нижней оси -гидроцилиндр привода, кинематически соединнный с одним плечом прижима. Отличительными признаками предлагаемой полезной модели является выполнение верхней челюсти в виде двух блоков прижимов, включающих жестко закрепленные на боковых...
Групповой захват преимущественно для радиодеталей
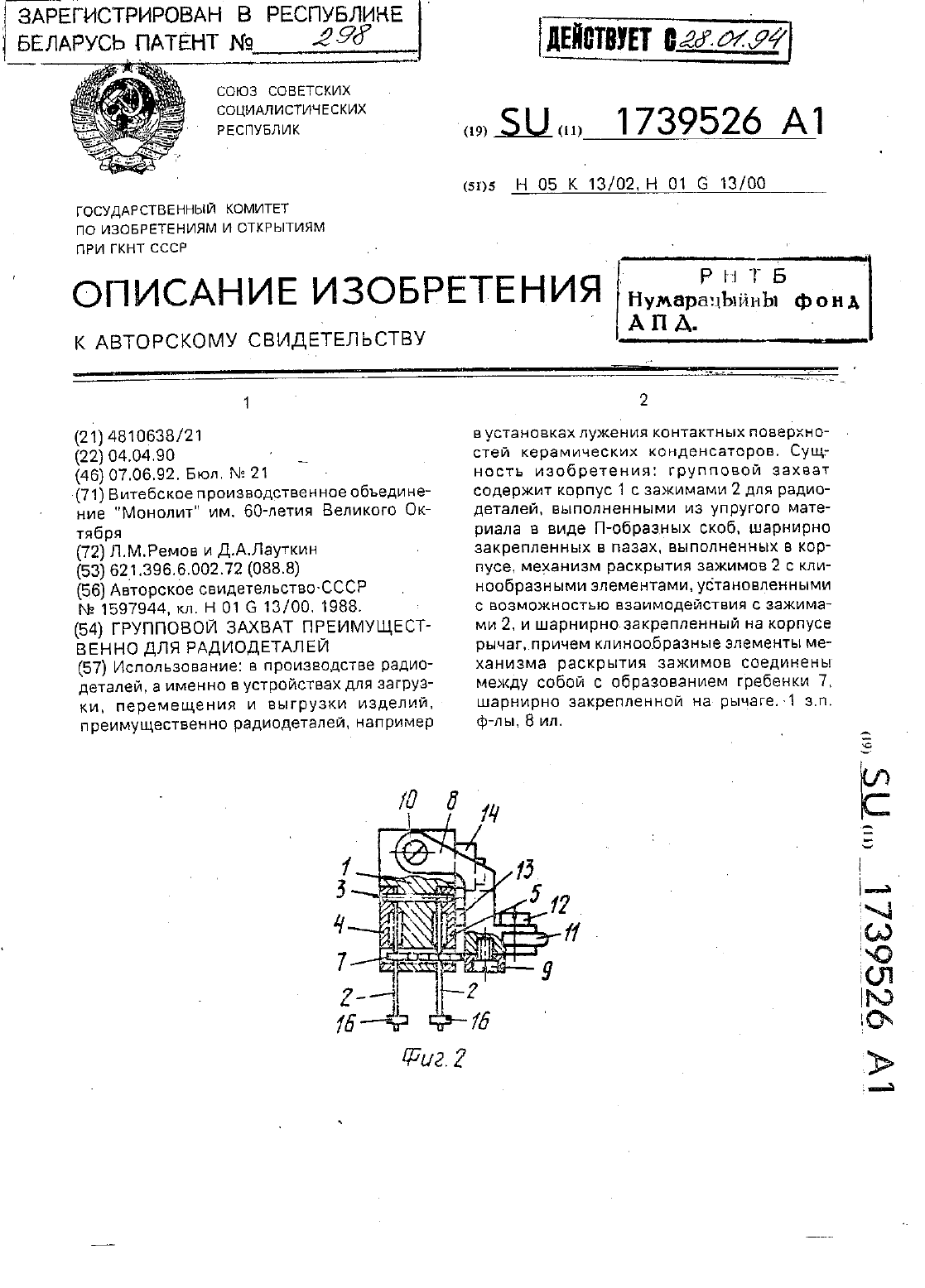
Номер патента: 298
Опубликовано: 30.12.1994
Авторы: Лауткин Д. А., Ремов Л. М.
МПК: H05K 13/02, H01G 13/00
Метки: преимущественно, захват, радиодеталей, групповой
Текст:
...метаплизационньлх покрытий.Транспортирующий механизм. с которым взаимодействует захват. состоит из привода (не показан). транспортирующего диска 17, к которому захват крепится винтами 18. и кулачка 19. связанного с приводом.Устройство для образования слоя сориентированных деталей (изделий) 16 представляет собой многоручъевой вибропитатель, включающий вибратор 20. лоток 21 с пазами 22 для радиодеталей 16 и с пазами 23 для входа зажимов 2 в...
Предыдущий патент: Устройство для очистки раневой поверхности
Следующий патент: Захватное устройство для штучных грузов
Случайный патент: Рабочий орган землеройной машины