Передвижная выправочно-подбивочная машина
Текст
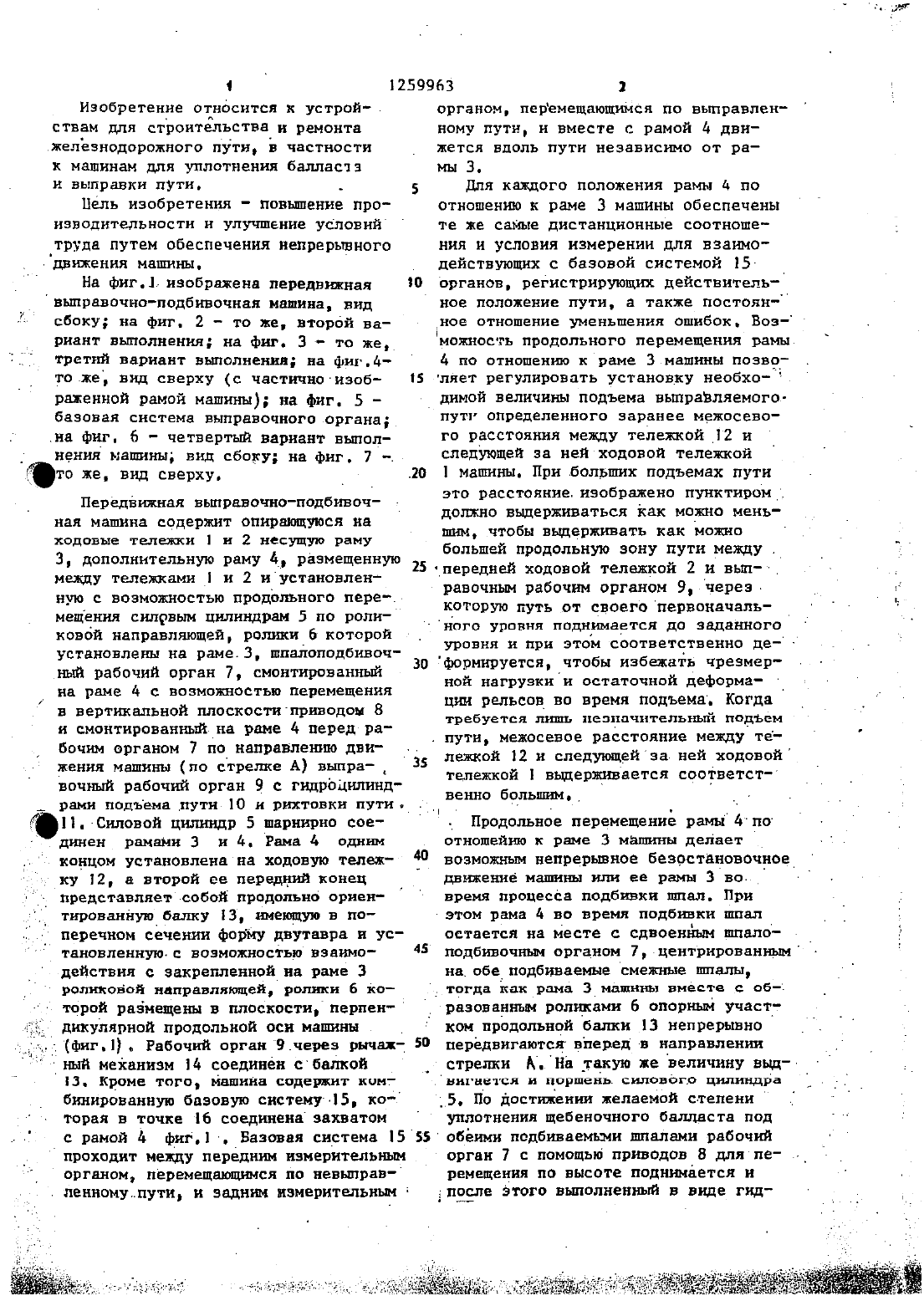
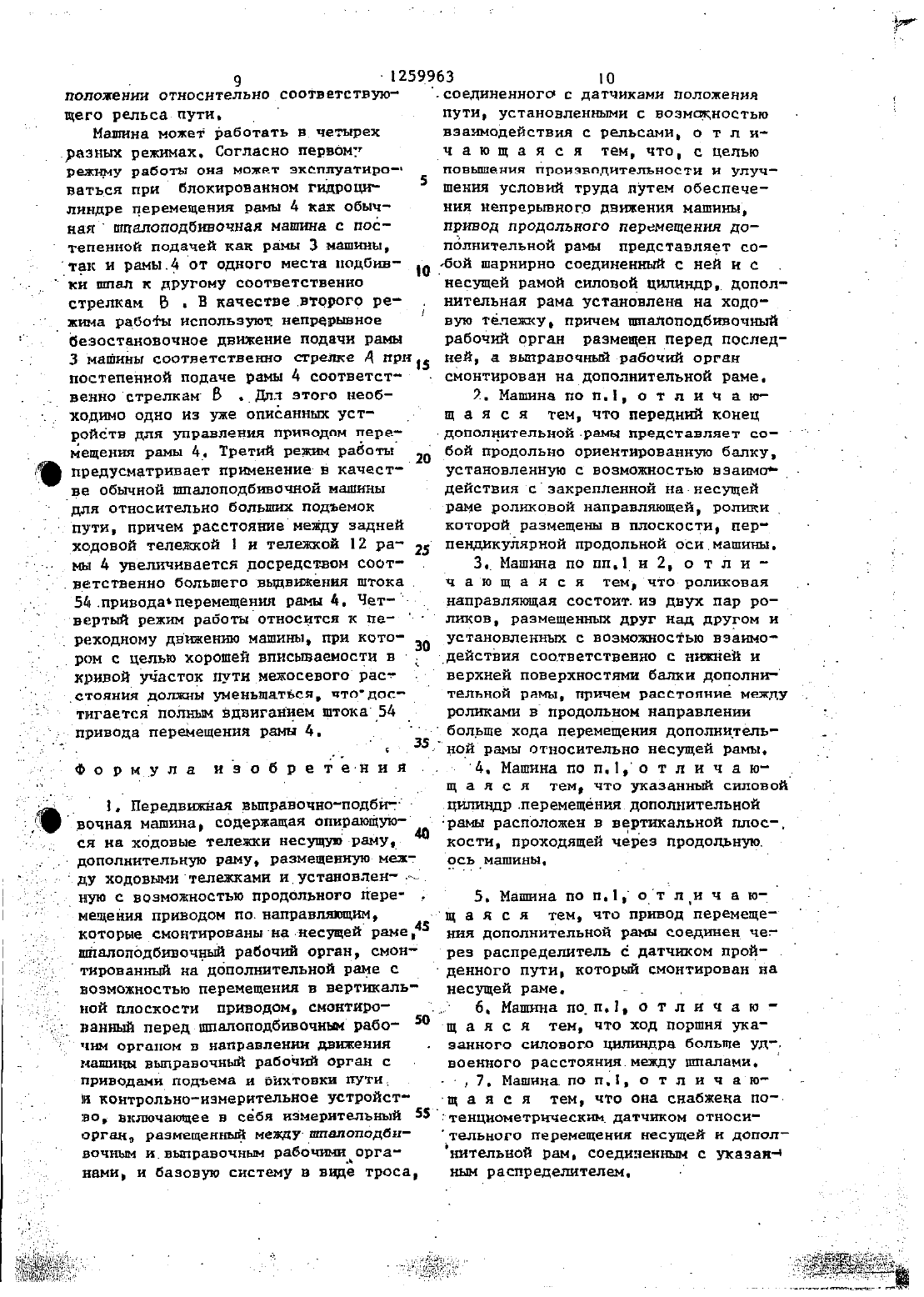
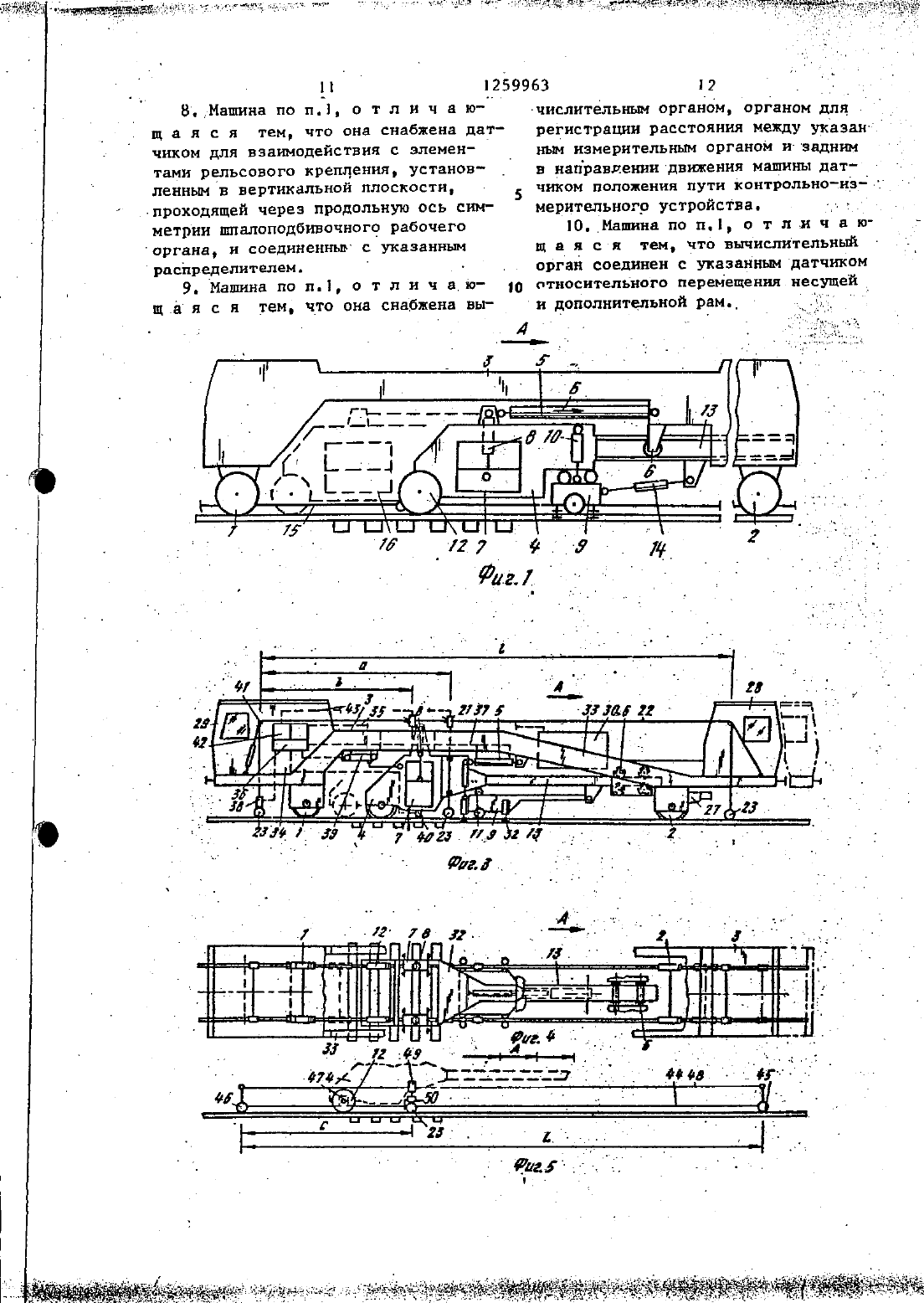
изобретение относится к устрой. стввм для строительства и ремонта.железнодорожного пути, Ь частности к машинам для уплотнения балласта и вьтравки пути.Цель изобретения - повышение производительности и улучшение условий труда путем обеспечения непрерывного двиения машины. 7На фиг.1 изображена передвижная выправочиоподбивочная машина, видсбоку на фиг. 2 то же, второй вариант выполнения на фиг, 3- то же трети вариант выполнения на фиг.д то.же вид сверху (с частично изоб раженной рамой машины) на фиг. 5 базовая система выправочного органа.на фиг. 6 - четвертый вариант выполнения машины вид сбоку на фиг, 7 чПередвиная выправочно-подбивочная машина содержит опирающуюся на ходовые тележки и 2 несущую раму 3, дополнительную раму 4, размещенную между тележками и 2 и установленную с возможностью продольного перемещения силовым цилиндрам 5 по роли-И новой направляющей, ролиии 6 которой установлены на раме.3, шпалоподбивочни рабочий орган 7, смонтированный на раме А с возможностью перемещения в вертикальной плоскости приодом 8 и смонтироваины на раме 4 перед рабочи органом 7 по направлению движения машины (по стреле А) выпра вочый рабочий орган 9 с гидроцилинд рами подъема пути 10 и рихтовки пути..концом установлена на ходовую тележку 12, а второй се передии конец представляет собой продольно ориентированиую балку 13, имеющую в по й перечном сечении форму двутавра и ус ТДНОВПЕННУЮ- С ВОЗНОЖНОСЬО ВЗДНМОдействия с закрепленной на раме 3 роликовой направляющей, ролики 6 ко Ш торой раамещены в плоскости, перпенднкулярной продольной оси машины 1 (фиг.1) Рабочий орган 9 через рычаж-нй механизм 14 соединен с балкой 3. Кроме того, машина содержит комбинированную базовую систему 15, которая в точке 16 соединена захватоморганом, перенещаюшися по выправленному пути, и вместе с рамой 4 движется вдоль пути иеэависно от рамы 3.Для каждого положения рамы Д по отношени к раме 3 машины обеспечены те же самые дистанционные соотношения н условия измерении Для взаимодействующих с базовой системой 15 органов регистрирующих действительное положение пути, а также постонндное отношение уменьшения ошибок. Воз МОЖНОСТЬ ПРОДОЛЬНОГО перемещения рамы.4 по отношению к раме 3 машины позволяет регулировать установку необхо днмой величины подъема выправляемогопутг определенного заранее межосевого расстояния между тележкой 12 Иследующей за ней ходовой тележкой1 машин. При.большик подъемах пути это расстояиие.ивображено пунктиром должно выдерживаться Как можно меньшим, чтобы выдерживать как можнобольшей продольную зону пути междупередней ходовой тележкой 2 и вып равочным рабочим органом 9, через КОТОРУЮ путь от своего первоначаль ного уровня подниается до заданного уровня и при этом соответственно деформируетсв чтобы избежать чрезмерной нагрузки и остаточной деформа- У ци рельсов во время подъема Когда требуется лишь незначительный подъем. пути, межосевое расстояние междУ те лежкой 12 и следующей за ней ходовой тележкой 1 выдерживается соответственно большш.Продольное перемещение рамы 4 по отношейнш к рае 3 машины делает возможны непрерывное беэостаиовочиое двиение машины ил ее рамы З во-р время процесса подбишки шпал. При-этом рама 4 во время подонки шпал остается на месте с сдвоеииы шлепо на обе подбиваемые смежные шпалы, дтогда как рама 3 машины вместе с об 50разоваинм ролнми 6 спорим участком продольной балки 13 непрерывно ПЕРЗДБНГЭЮТСЯ ВПЕРЕД В НВПРВВЛЕНН стрелки А На такую же величину выд-.5. По достиении желаемой степени уплотнения щебеночного балласта подс рамой 4 флг.1-. Базовая система 1555 и обеими подбиаемыми шпалами рабочиорган 7 с помощью приводов 8 для перемещення по высоте поднимается идпосле этого выполнении в виде гид проходнт между передним измерительнморганом, перемещающимся по невырав ч ЛЕННОМЫПУТН, Н ВНДННМ ШЗНЕРНТШ 1 ЪНЬШ 5роцилиндра-двойного действия привод З нагружается в направлении, покаэанном стрелкой Б. Рама 4 до тех пор подвергается с относительно болвщой скоростью на величину, равную пример-5 но трем расстояниям между шалани,пока шпалоподбивочиый рабочий орган 7 ие будет находиться в центрирую щем положении относительно последующих подбиваемьпе шпал, находящихся 10 впереди. .Во втором варианте выпрлиения машины (фиг.2) рама Зчсостоит-из двух шарнирно.соединенным междусобой поворотной опорой 17 частей, под ко-15 торой установлена тележка 18. На передней части рамы З установлены шпалоподбивочный 7 И выправочный 8,рабочие органы. На второй части рамы 3 установлена дополнительная ра- 20 ма 4, один конец которой опирается на тележку 12, а второй, выщолненный в виде продольной балки 13, через, ролик 19 опирается на направляющуюд цилиндром 5 перемещается относиТЕЛЬНО рамы 3. На. машине СМОНТНРОВЗ но контрольно-измерительное устрой 39 ство включающее в себн измеритепь- ные органы 21, размещенные между шпа- лоподбивочнм и выщравочным рабочи-. ми органами, и базовую систему в внде троса 22, соединенного с датчима-з 5мн 23 положения пути в процессе ра- боты машнд вэаиодействующии с рельсами-путиИзмерительные органы 21 представляют собой вращающиеся потенциометры, соединенные с датчи- 40 ками 2 З,.взаимодействуют с тросами 22 и предназначены для определения раз-ности между заданным И действительным положениями пути в зонах размег .щения рабочих органов 7 и 9. Впра- е 45, вечные рабочие органы 9 имеют собственную контрольно-измерительную систему, состояющую из проходящегов основном по оси пути троса 24, натянутого между передней 25 и задней 50 26 измерительными тележками. Тележ ка 25 перемещается по невыправпениому пути, а тележка 26 повыправд . ленному пути.С тросом 24 взаиодейд ствуют щупы (не показаны), установ- 55 дленне на датчиках 23 и-предназначендные для опредепения разностей между заданной и действительной стреламичин органов 7 и 9. В процессе работы машины могут испольэоватвся только рабочие органы 7 и 9, смонтированные на передней по направлени двиеникд машины части рамы 3 (по стрелке А) при цищличной работе машины или рабочие органы,смонтированные на зад-ней части рамы 3, при непрерывномдвижении машины. При работе всех ре-бочих органон машины передний шшапо-т, подбивочн рабочий орган 7 сначаламойдпалы, а эатемзадний шпапопод бивочный рабочий орган 7 центрирует ся относительно подбишаемой шшалы.ДВозможно одновременное использование шпалоподбиочнын рабочих органов 7при разным расстояниях между ыщаламн. При работе машины возможен болъшойПОДЪЕМ ПУТИ за СЧЕТ ПОСЛЕДОВЗТЕЛЬНОГО Йего подъема выщравочнымн рабочими органами 9. 1На фиг.З и 4 показан предпочтительный вариант выполнения машмиы, 1иг.. При атом роликовая направлякг щая состоит из двух пар роликов 6,размещении друг над другом и установленным с возможностью взаиодействин соответственно с ниней и верх-1 ней поверхностями балки 13, причем 2 расстояние между роликами 6 в продопъном направлении больше кода перемещения рамы 4 относительно раны 3. Машина имеет привод 27 тележ- дана на раме 3 аналогично вариантустрелкой А. На машине установлены две кабины 28 и 29 для обслуживающего персонала и энергетическая ус-У тановка 30. Выправочнъй рабочий ор ган 9 направляется по пути ролиами З с.ребордой и имеет взаиодейству ющие с нннейчастью головки рельса подъемие ролики 32. Рама 3 машины в месте расположения рамы 4 состоит из двух продольнм балок 33. Концы тросов 22 контрольно-нэмерителъного устройства машин соединены с датчиками 23 положения пути, один из которых размещаются на невьшравленном.пути, а вторые - на вышравленном. По одному датчику 23 размещается в эоне.выправни пути на каждом рельсе пути, зти датчики связаны с измери-тельнми органами 21. Машина об 0 РУдована дополнительным устройствами,согласно которому рама 4 смонтиро-пути, который через каждый сантиметрдОна раме 4 примерно по осн симмет- Комбинированная базовая система- рин шалоподбивочного рабочего орга- (фиг.5) пригодиа. например. для УС на 7. Этот датчик 40 ведет себя нейт- .тановки в выправочно-подбивочную ма сительное перемещение между рамой 4КОТОРЫВ ОбеСПеЧНВдЮТ аВТНаТЧеСКОе Щего положения индуктивный датчик 40 УПРЕВПЕНИЕ РЗООЧННН ОРГЗНВМН МЗШИНЫ передает на распределитель 36 управН содержат БЛОК 3 д Управления КОТО лающий сигнал, увеличивающий илиРей ПРОВОДОМ 35 С 0 едННеН.С Энергетн уменвшающнй в зависиости от отклоЧеСКОй УСТЗНОВЕОЙ 30 И имеет РОСПРЕ 5 иеиия подвод рабочей жидкости к сиделитепъ 35, ЧеРе 3 КОТОРЫЙ ПО ТРУ 5 О . ловомуцнлиндру 5. Таким образом,провоцУ 37 УПРЗВПЯЕТСЯ СИЛОВОЙ пи шпалоподбивочный рабочий орган 7 осЛННДР 5 ПеРеНеЩеННЯ Рамы 4. Машина тается до окончания работы подбивкисодержит Объеднненннй с датчиом 23 шпалы в центрируюшем положении по ПОЛОЖЕНИЯ ПУТИ датчик 38 пройденного о отношению к нейПри этом существует возможность пройденного машиной пути подаетиараспределитель 36 управляющий сигнал,регулирующий подвод рабочей жидкости в правую полость цилиндра 5 так. что рама Д с рабочим органом 7 до окончания процесса подбнвки шпалы остается неподвиной относитепьно.подбиваемой шпалы В момент пуска в ход шпалолодбивочиык рабочих органов 7 распределитель 36 реверсируется с помощью концевых вьшлшчателей, левая полость ци линра 5 нагружается сжатием И рама наченном жирной линией, соединенный 4 ОЫСТРЫМ ХОДОМ передвигается ВПеРед.25 с датчиком 23 измерительный орган 21 П 0 Ка Шпалоподбивочные Рабочие ОРГа находится на относительно большем НЫ 7 Не ОУДУТ НЗХОДЛТЪСЯ В ЦЕНТРНРУЮ расстоянии ц отзадией базовой кощем положении относительно следУЮЩей. нечной точки 4 натяжного троса 22. подбиваеной шпалы. Одновременно с. исходя из общей длины натяжного опусканием шпалоподбивочныщ рабочихъ 30 троса 22 коэффициент уменвшенил ошиорганов 7 датчик 38 пройденного пу л бок равен о( в показанном пунктир-Д ти устанавливается на нуль, после ной линией заднем конечном положении чего начинается новы рабочй цикл. рамы 4 расстояние измерительного орТакой же ход движения получается н при нспольаованни вкючающего отио-35 УМВНЪШЗЕТСЯ Н 35 еПНЧИНУ Б так. ЧТО получается коэффициент уменьшения ошибок. равный БЕ . Это означаетством торможения тележки 12 и одновременного регулирования без давле 15 ния цилиндра 5 перемещения раны 4 во-время подбивки шпал. Во время процесса подбнвки шпал и непрерывного лродвиения машины вперед (фиг.3) изменяются дистанцидд онные соотношения и тем самым отно шеине-уменьшении ошибок контрольноизмерительного устройства. В перед и рамой 3 машины измерительного органа который в случае примера вы- что козффиЦИеНТУНеЪшЕЯшнбк полненнл сконструирован как потенцио- прнниает оптимальное значение кметрический датчик 39 канатной тяги до окончани процесса подбивки шпал.т.е. ко времени окончательной выправки пути.Блок 34 управления снабгжен корректировочные или вычислитель УПРЗБЛЕННЕ движением ПОРШНЯ цилиндра 5 происходит пропорционально-двиеННЮ ПЕРЕМЕЩЕНИЕ ИЛИ ННВЮЩЕНУСЯ В качестве сигнала выходному напряжению д 5 соединен с измерительным органом 21,потенциометрического датчиша 39. с датчиком 38 пройденного пути или- - ет ическн атчнжом 39 Третья возможность управления рас- потенциом Р Дкото ЬЩ иомпенсн ет влияние различпределителем 36 заключается в уста- Р ру Б.- е - ным расстояии от а-до до величиНОВКЕ взаимодействующего с рельсовы - -. ны вып авки 2 мн креплениями индуктивного датчика 5 - Р ральнодо тех пор, пока он находится шину, конструкция КОТОРОЙ ПОКе 9 еН 8 в центрнрующем положении по отноше- 55 на фиг.3 н Ь. Особенность этоибазоиию к соответствующему рельсовому вой системы состоит в том, что она креплению или к подбнваемой шшале. независимо-от рамы 3 машины вместе При отклонениях от своего центрирую- с несущей рабочие органы 7 И 9 Рабустанавливать на пути раму д посред нем конечном положении рамы д,обозгаиа 21 от базовой конечной точкид 1мой д постепенно движется в продоль-Ц нон направлении пути от одного места подбивкн шпал к другому в направпении стрелки А . С этой целью в ка-Ц честве исходной прямой предусмотрен установленный в основном по оси пути механизм М, который тянется от пе редней измерительной тележки 45, идущей повьшравленному пути, до эад- ней измерительной тележки 146, идущей Ю по выправленному пути, и который соединен с рамой д соединительным узлом 17, Последний, воздействующий,например, на тележку 12 рамы д, выполнен- так, что он обеспечивает зах- 15 ват механизма. Мг в продольиомнаправлении путии не препятствует свободной подвижности механизма М по- перек пути. В качестве нивелировочной базовой системы над каждым рельсам 20 пути установлен Чъатяжной трос 48, дпротянутьъй между измерительными тележками 45 и 46. Относящийся кране 4 кг измерительный орна 21 взаимодейстт вует с базовойсистемой для регистра-д цин разностей междУ действительным и ЗЗДНННЫМ ПОПОЖЕЬНЕМ ПУТИ. Б ПЛЗН и профиле. Для этого ог-ъимеет на каэкдый рельс пути выполненный как. вращающийся потенциометр изнеритель- 30-ный щуп 49, который взаимодействует с относящимся к соответствующему рельсу натюкньм тросом 48. другой измерительный щуп 50, установленный на измерительном органе 21, по. оси 55 пути взаимодействует с механизмом для регистрации разностей между. дейчдгиба пути. У данной базовой системы оказывается постоянный коэффициент до уменьшения ошибок ЕЛ. так, что уст тановка корректировочного или вычис-д дтнтелъиого органа 142 является излиш На фиг-б и 7, показана въшравочно- 45-подбивочная машина ъгмеющая передвнт гаюпппося с помощью ходовых тележек 18 и 2 по пути, состоящему. из рельсов н шпал, раму 3 машины, дот-орал ш-яеет действующий на обе ходовые те- 50 лежки 1 и 21 привод 51 пощения, д энергетическую установку 30 и кабинудбочее направление наш-хны показано стрелкойА . СтрелкиВ накладно по- 55 называют постепенное движение подат л Ечи рамы 3 машины. На заднем конце этой рамы 3 машины находится опориькйг.. . участок, который выполнен как враща . ющаяся вокруг вертикальной осн 52 -. к шарнирная муфта 53. Этой вращающедд-д муфтой 53 рана 4 тяжелой конструкции, . ч опирающаяся на одноосную ходовую те- лежку 12, щарнирно соединена с рамой3 машины. На раме 4 установлены кат у - бина 29 для обслуживающего персонала и над каждым рельсам пути с возмок- ностыо перемщения в вертикальной - у плоскости приводом 8 шпапоподбивочч ньлй рабочий орган 7. Продольная бал ка 13 рамы 4 редставлнет собой тид- роцилиндр перемещения рамы д отно- ситеЪьно рамы 3. Шток 54 этого гидроцилиндра соединена с муфтой, 53. Вьш-дравочный рабтий орган 9 посредст вом тягиу 55 з гидроцилиндров 10 смонтирован на-ранед. Рабочий орган 9 оснащеннаправтяющими роликами 31 с тебордой и пщгьениьлми роликами 32 Машина эборудатвана оптической баао-вой системой, размещаемой над кап дьвч релвсом пути и состоящей из передатчика 56, шпример инфракрасногоили лазерногоуперемещаемого по невыправленпому пути тележкой 2, и к приемника 57 опирающегося на тележку 12, перемещающуюся по выправлениому пути. Базовая система содериит экран 58, который через стойку 59 А опирается на измерительный орган 60,перемещающийся по рельсам пути, и взаимодействует с лучом Ы передат- Чика 56. Маши-ш также содержит рьпстот вочную- базовую систему 62, передний конец которой закреплен на измерич тельной теленке 63. перемещающейся уч конец - на измерительной тележке 64, перемещающейсопо направленному путте.- Тепежкакбд соединена с рамой 4 идили стойкой бзсоединен щуп бБ, вы шолненньцй в вще евра-щаэощсгося потенщнометра и взаимодействующий с база- Йа они наказаны автоматическое слежение я установка рамы 1 и соединению с ней рабочих органов 7Ни -9 по продольному направлению пути.Рама 14 следует независимом рамы 3 Й машины по направлению кривой путитак, что механизмы шпалоподбнвочнъш-7 и вшъравочнькг 9 рабочих ОЬГЗНРБ постоянно находятся в правильном
МПК / Метки
МПК: E01B 27/17
Метки: передвижная, выправочно-подбивочная, машина
Код ссылки
<a href="https://by.patents.su/8-558-peredvizhnaya-vypravochno-podbivochnaya-mashina.html" rel="bookmark" title="База патентов Беларуси">Передвижная выправочно-подбивочная машина</a>
Выправочно-подбивочно-отделочная машина
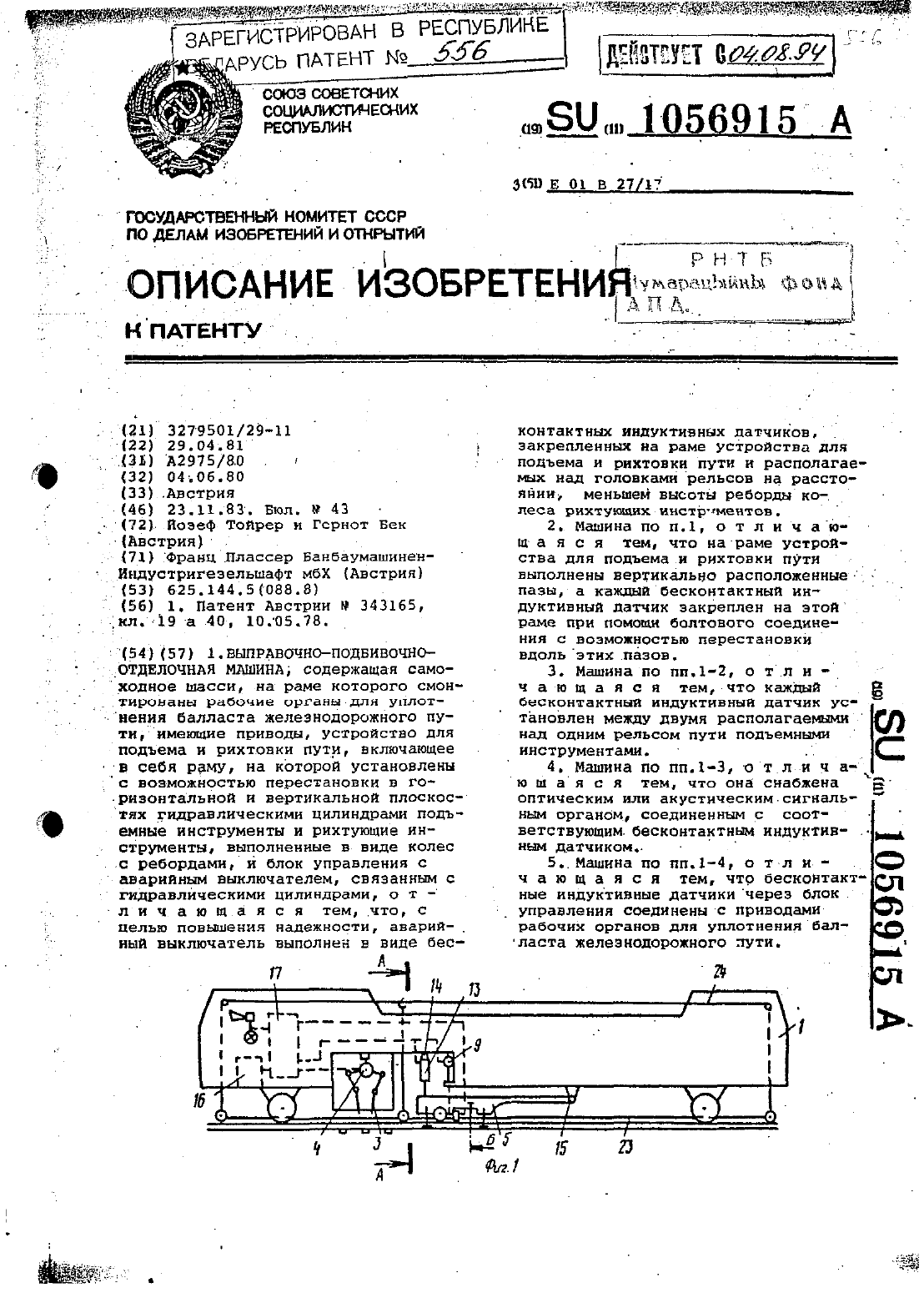
Номер патента: 556
Опубликовано: 30.06.1995
Авторы: Гернот Бёк, Йозеф Тойрер
МПК: E01B 27/17
Метки: машина, выправочно-подбивочно-отделочная
Текст:
...машмнед содержащей самоходное шасси, на раме которогосмонтированы рабое чне органы для уплотнения балластавод, устройство для подъема н рнх товкн пути, включающее в себя раму,на которой установлены с возможнос трио перестановки в кэризонтапьной и вертикальной плоскостях гидравли ческими цилиндрами подъемные инстр 9 35машина содержит самоходное шасси 1, на раме 2 которого смонтированы рабочне органы 3 для уплотнения балласта...
Машина для выправки железнодорожного пути
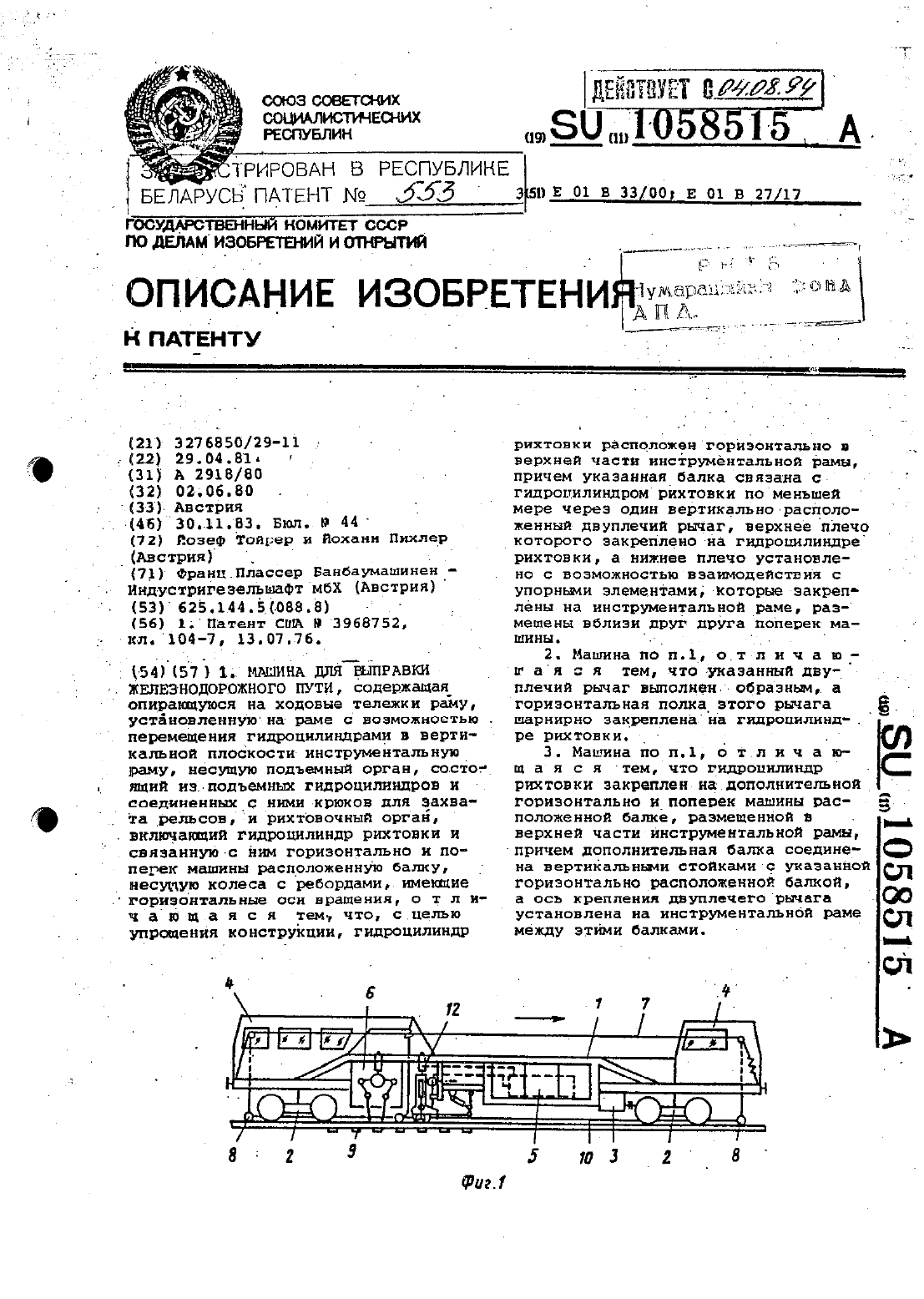
Номер патента: 553
Опубликовано: 30.06.1995
Авторы: Йозеф Тойрер, Йоханн Пихлер
МПК: E01B 33/00, E01B 27/17
Метки: машина, пути, выправки, железнодорожного
Текст:
...стойками с указанНОЙ ГОРИЭОНТЕЛЬНО РЗСПОЛОЖЭННОЙ балкон. а ось крепления двуплечегорычага установлена на инструментальной раме между этими балками.На Фиг.1 изображена машина для выправки желеэнодорожногопути общий вид на фиг.2 подъемный ну рихтовочны органы в увеличенном масштабе, вид сбоку на фиг.3 Вид А На ФНг.2 наФиг.4 г вариант выполнения погъемного органа, вид сбоку на фиг.5 6 и 7 подъемныя и риктовочныи органы иекшие различные...
Машина Голубева В. И.
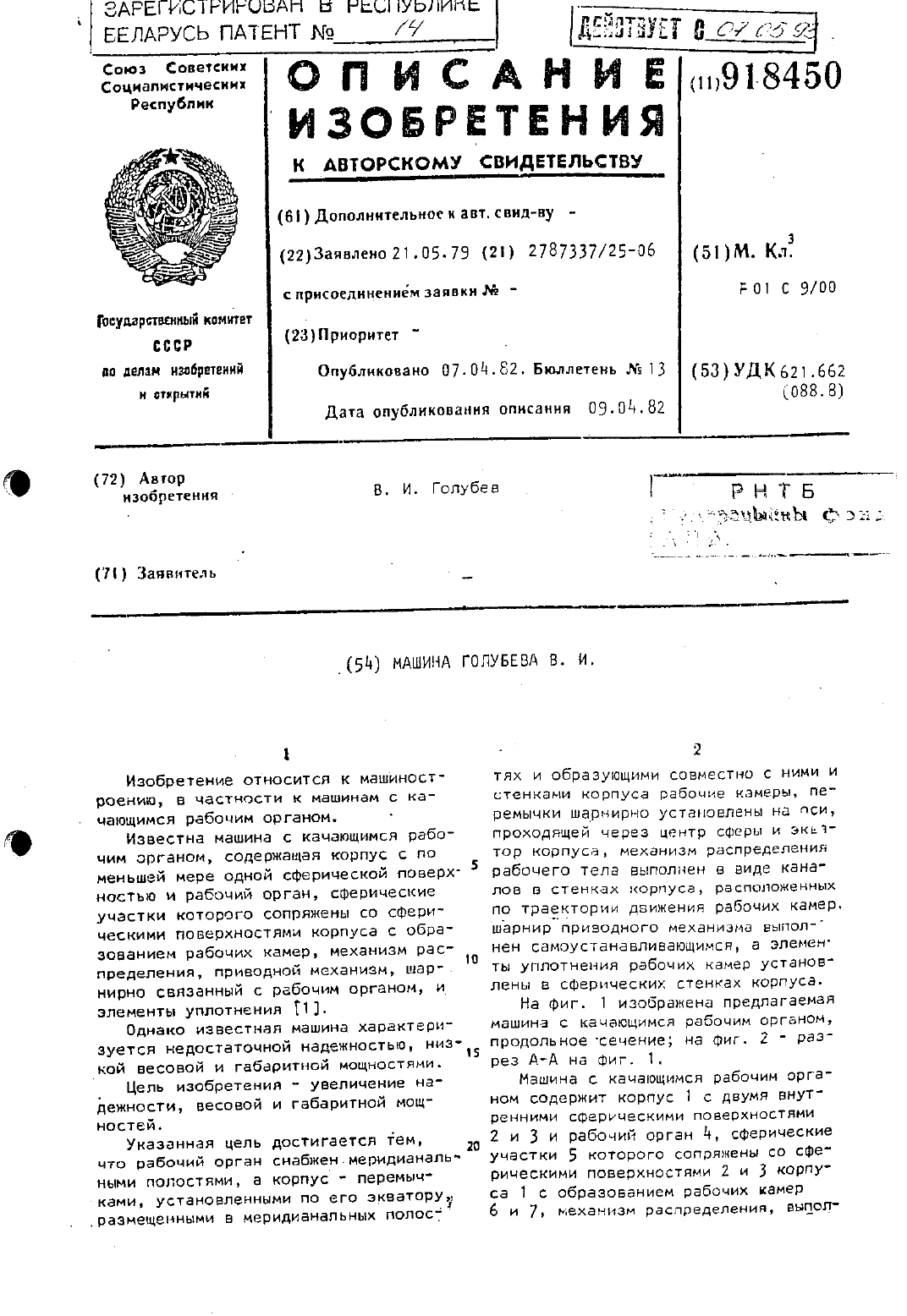
Номер патента: 14
Опубликовано: 30.05.1994
Автор: Голубев В. И.
МПК: F01C 9/00
Текст:
...рабочим орга- тонон в режиме двигателя работает следующим образом.Рабочее тело подается в коллектор,объединяющий все каналы 8, находящие ся с одной стороны вдоль рабочих ка- 15мер Б. отводится рабочее тело из каналов 9 в отводящий коллектор (не показан). При этом под давлением рабочего тела рабочие камеры 6, подклю ченные к каналам 8, начинают двигать-дася относительно перемычек 16 и приводят в движение рабочий орган Ц, связанный с...
Машина Голубева В. И. с качающимся рабочим органом
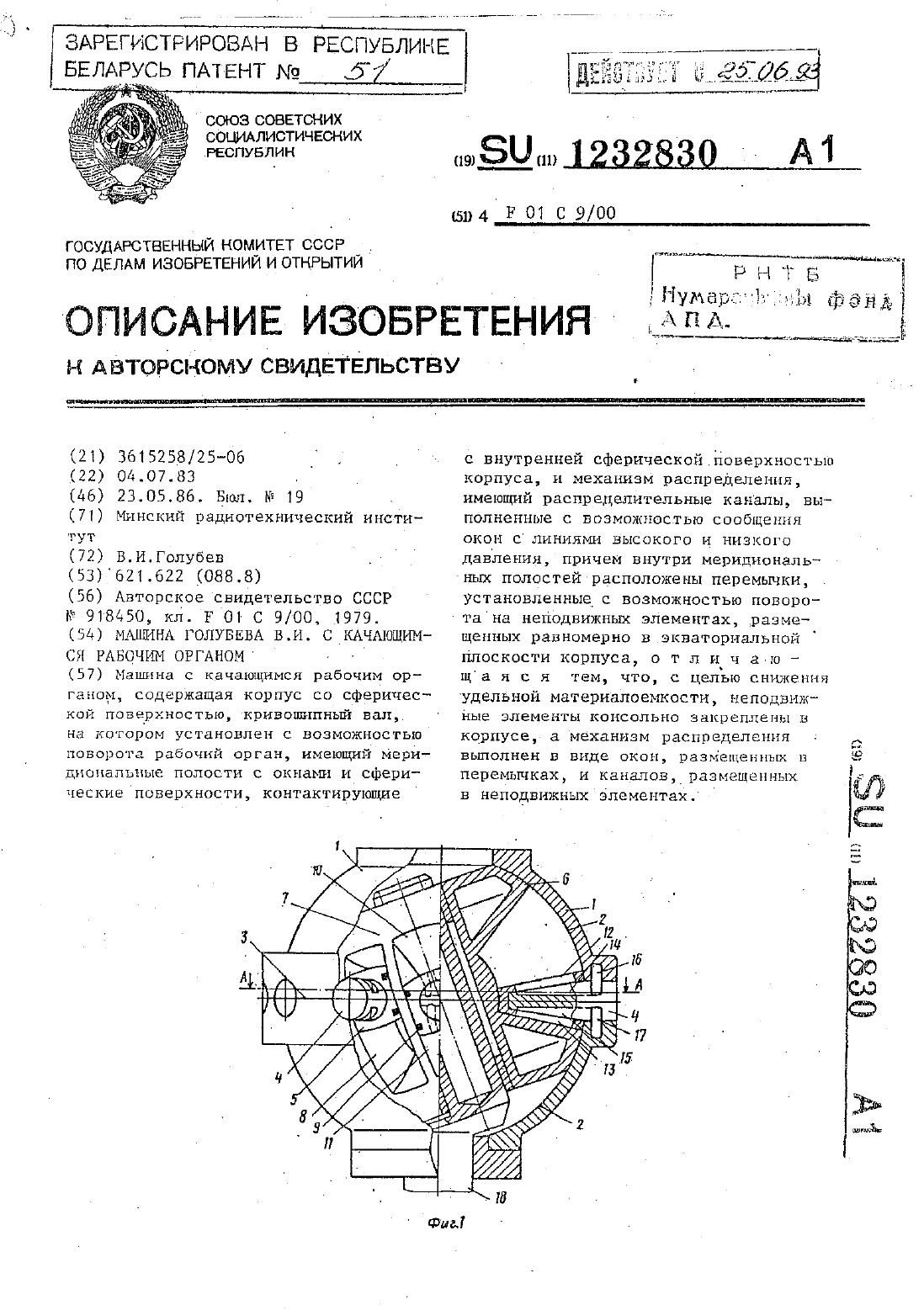
Номер патента: 51
Опубликовано: 30.09.1994
Автор: Голубев Владимир Иосифович
МПК: F01C 9/00
Метки: голубева, органом, рабочим, машина, качающимся
Текст:
....На фиг. 1 изображена машина с качающимся рабочим органом на фиг.2 разрез АА на фиг. 1 на фиг 3 печ ремычка и неподвижный элемент, поперечньй разрез.МЗЦННЕ С КЗЧЗЮЪЦИЙСН рабочим органом содержит корпус 1 с внутренней сферической поверкноствю 2. По экватору 3 корпуса 1 нанеподвижных злее ментах 4, выполненным в виде консоль но закреппенны в корпусе-1 осей, ус тановлены с возможностью поворотапе ремычки 5 Машина содержит также ран бочий...
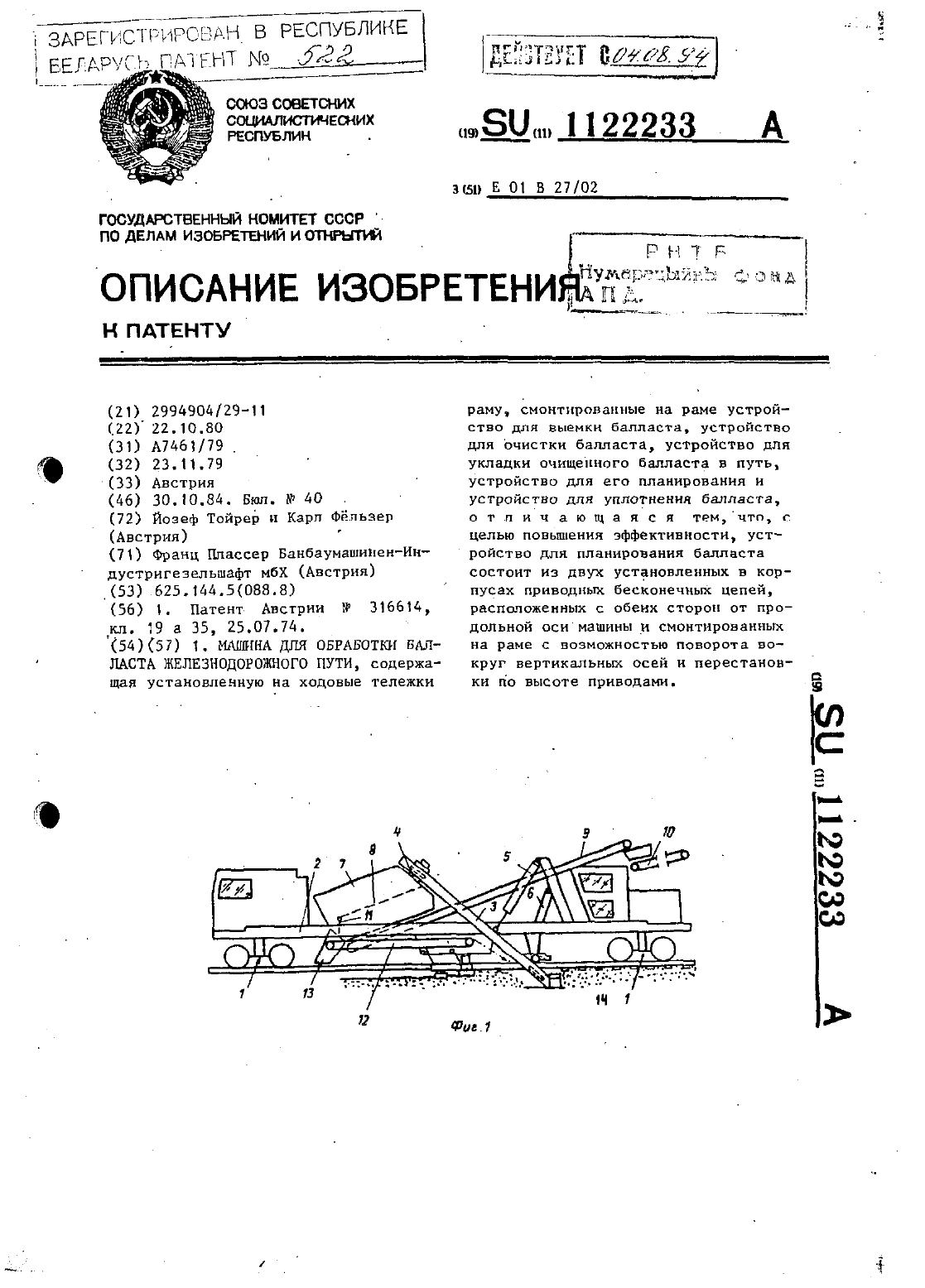
Машина для обработки балласта железнодорожного пути
Номер патента: 522
Опубликовано: 30.06.1995
Авторы: Йозеф Тойрер, Карл Фёльзер
МПК: E01B 27/02
Метки: балласта, пути, обработки, железнодорожного, машина
Текст:
...фиг.1 схематически изображена машина-для обработки балласта желез иодорожного пути, общий Вид Нафиг.2 устройство для планировании балласта и устройстводля-его Уплотнения, вид сбоку на фиг.3- разрез А-А на фиг.2. .Машина для обработки балласта железнодорожного пути содержит установленную на ходовые тележки 1 раму 2. На-раме 2 смонтировано устройство 3 для выемки балласта, состоя Ещее из бесконечной тяговой цепи,которая с помощью...
Предыдущий патент: Шпалоподбивочный агрегат передвижной путевой машины
Следующий патент: Устройство для подбивки шпал и выправки пути для путевой машины со смонтированной на ходовых тележках рамой
Случайный патент: Композиция для приготовления лекарственного средства для лечения или профилактики заболеваний щитовидной железы