Кривошипно-шатунный механизм
Текст
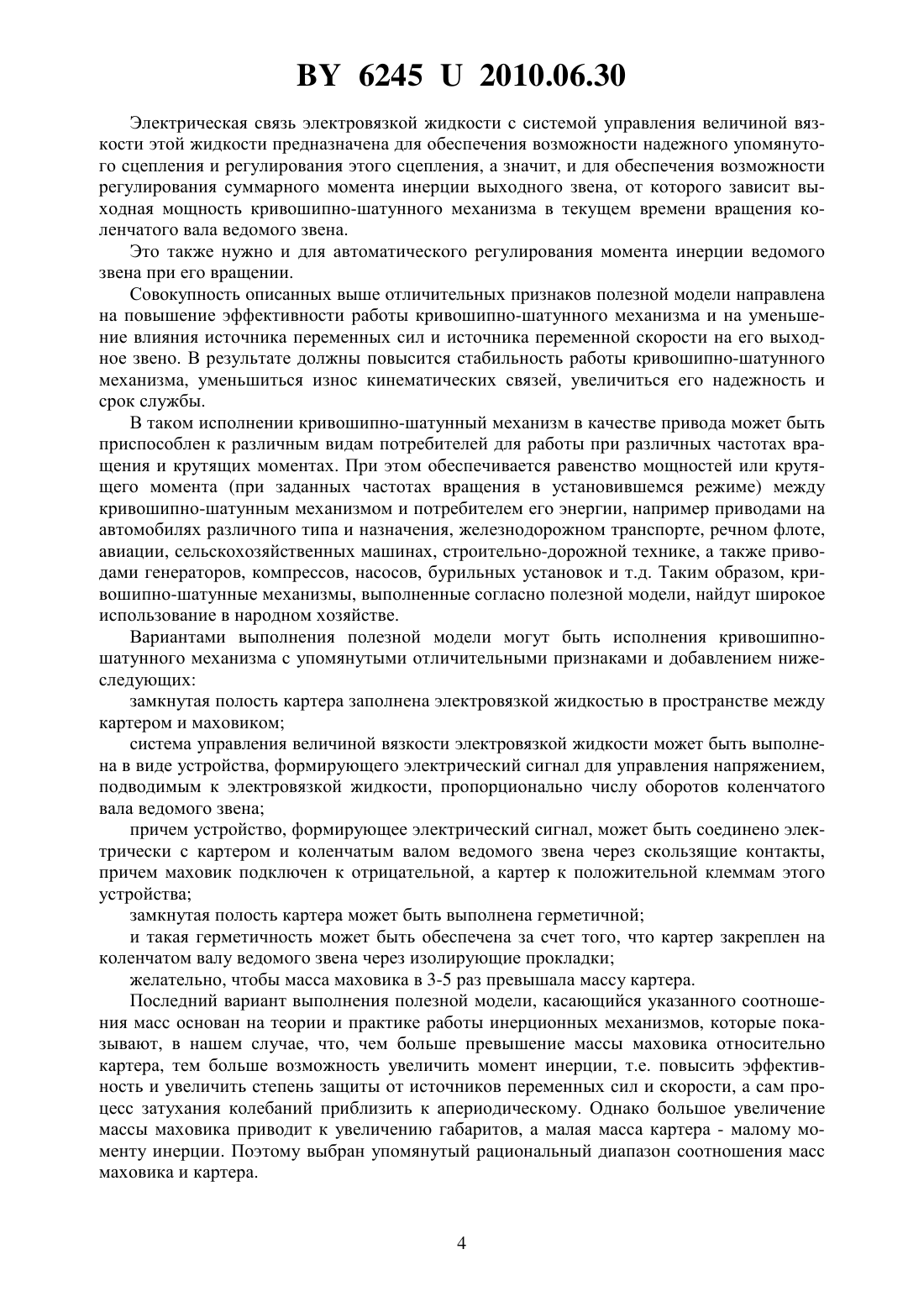
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Мишута Дмитрий Викторович(72) Автор Мишута Дмитрий Викторович(73) Патентообладатель Мишута Дмитрий Викторович(57) 1. Кривошипно-шатунный механизм, содержащий установленный в корпусе шатун,связанный с ведущим звеном возвратно-поступательного движения и с ведомым звеном вращательного движения, выполненным в виде коленчатого вала, на котором расположен ведомый диск, при этом ведомое звено вращательного движения снабжено корректирующим механизмом, отличающийся тем, что ведомый диск выполнен из двух частей в виде установленного жестко на коленчатом валу картера с замкнутой полостью и в виде маховика, установленного на коленчатом валу соосно картеру на подшипнике внутри замкнутой полости картера, причем корректирующий механизм образован ведомым диском,замкнутая полость картера которого заполнена электровязкой жидкостью, связанной электрически с системой управления величиной вязкости этой жидкости. 2. Механизм по п. 1, отличающийся тем, что замкнутая полость картера заполнена электровязкой жидкостью в пространстве между картером и маховиком. 62452010.06.30 3. Механизм по п. 1, отличающийся тем, что система управления величиной вязкости электровязкой жидкости выполнена в виде устройства, формирующего электрический сигнал для управления напряжением, подводимым к электровязкой жидкости, пропорционально числу оборотов коленчатого вала ведомого звена. 4. Механизм по п. 3, отличающийся тем, что устройство, формирующее электрический сигнал, соединено электрически с картером и коленчатым валом ведомого звена через скользящие контакты, причем маховик подключен к отрицательной, а картер к положительной клеммам этого устройства. 5. Механизм по п. 1, отличающийся тем, что замкнутая полость картера выполнена герметичной. 6. Механизм по п. 5, отличающийся тем, что герметичность замкнутой полости обеспечена за счет того, что картер закреплен на коленчатом валу ведомого звена через изолирующие прокладки. 7. Механизм по п. 1, отличающийся тем, что масса маховика в 3-5 раз превышает массу картера.(56) 1. Артоболевский И.И. Механизмы в современной технике Т.П. - М Наука, 1979. С. 449. 2. А.с. ССР 1036998 А 1, МПК 16 29/08, 1983 (прототип). 3. Алексеев В.П., Иващенко Н.А., Ивин В.И. и др. Двигатели внутреннего сгорания. М. Машиностроение, 1980. - С. 39. Полезная модель относится к машиностроению и может быть использована для кривошипно-шатунных механизмов, применяемых в приводах различных машин и механизмов для повышения их коэффициента полезного действия (КПД). Известен кривошипно-шатунный механизм, содержащий шатун, один конец которого связан с ведущим звеном поступательного перемещения, а второй с кривошипом - с диском ведомого звена вращательного движения 1. Недостатком такого аналога полезной модели является низкий КПД кривошипношатунного механизма из-за падения развиваемых им усилий во время движений ведущего звена около так называемых мертвых точек, например поршня двигателя внутреннего сгорания в крайнем верхнем и нижнем положении своего возвратно-поступательного движения. Известен кривошипно-шатунный механизм 2 с более высоким, чем у аналога 1,КПД, выбранный за прототип полезной модели. Он содержит шатун, один конец которого связан с ведущим звеном поступательного перемещения, а второй - с диском ведомого звена вращательного движения через корректирующий его вращение ленточно-роликовый механизм. Корректирующий ленточно-роликовый механизм выполнен в виде ленты, охватывающей ведомый диск. Один конец ленты связан с шатуном, а второй - с этим диском через ролик, взаимодействующий с боковой поверхностью диска с возможностью перемещения вдоль оси последнего. При этом лента имеет возможность взаимодействия с двумя кулачками, закрепленными по разные стороны от диска. Так как упругая лента, охватывающая ведомый диск, во время движения шатуна передает усилие ведомому звену по касательной к диску, то он поворачивается под действием максимальной силы, не зависящей от угла наклона шатуна, чем достигается увеличение крутящего момента и обеспечивается более высокий КПД кривошипно-шатунного механизма. Однако недостатками прототипа 2 являются отсутствие возможности эффективно увеличивать полезную мощность кривошипношатунного механизма, управляя двумя факторами увеличением частоты вращения и од 2 62452010.06.30 новременно величиной вращающейся массы ведомого диска ведомого звена, т.е. его крутящего момента нестабильность работы кривошипно-шатунного механизма, низкая надежность, повышенный износ, обусловленные колебаниями скорости вращения диска ведомого звена. Данные колебания скорости называются вынужденными, под ними понимают колебания,происходящие под действием внешних периодически изменяющихся сил. Эти колебания происходят с различными амплитудами и частотами и обусловлены источниками переменных сил и переменной скорости, воздействующих непосредственно на диск ведомого звена. Они возникают в основном при превращении поступательного движения поршня в его верхней и нижней точках этого движения (мертвых точках) во вращательное движение ведомого диска. Колебания скорости также обусловлены переменной силой трения в подшипниках коленчатого вала, в подвижных узлах потребителей энергии вследствие шероховатости поверхности подшипников и непостоянством их смазки. Колебание скорости могут возникать из-за некачественного изготовления зубьев шестерен передаточных механизмов. Указанные недостатки прототипа 2 вызывают снижение эффективности кривошипно-шатунного механизма, увеличение расхода потребляемой энергии и, как следствие,ухудшение экологии. В указанном механизме не обеспечивается автоматическое регулирование момента инерции вращающего ведомого звена в процессе работы в зависимости от необходимой мощности потребителя энергии и запаса его прочности по мощности. Колебания скорости вращения диска ведомого звена, обусловленные источниками переменных сил и скорости, вызывают нестабильность работы механизма, уменьшение его надежности, увеличение износа и уменьшение срока службы. Задача полезной модели в повышении эффективности и надежности работы кривошипно-шатунного механизма вследствие упрощения кинематических связей в нем и обеспечения автоматического увеличения момента инерции его вращающегося ведомого звена в процессе работы устройства в зависимости от необходимой мощности потребителя энергии и запаса его прочности по мощности для повышения эффективности и надежности устройства в работе, а также для увеличения срока его службы. Это решается тем, что кривошипно-шатунный механизм, содержащий установленный в корпусе шатун, связанный с ведущим звеном возвратно-поступательного движения и с ведомым звеном вращательного движения, выполненным в виде коленчатого вала, на котором расположен ведомый диск, при этом ведомое звено вращательного движения снабжено корректирующим механизмом, имеет отличительные признаки ведомый диск выполнен из двух частей в виде установленного жестко на коленчатом валу картера с замкнутой полостью и в виде маховика, установленного на коленчатом валу соосно картеру на подшипнике внутри замкнутой полости картера, причем корректирующий механизм образован ведомым диском, замкнутая полость картера которого заполнена электровязкой жидкостью, связанной электрически с системой управления величиной вязкости этой жидкости. Выполнение ведомого диска из двух частей направлено на появление элементов, создающих раздельные моменты инерции на валу ведомого звена. Жесткая установка на коленчатом валу картера с замкнутой полостью и установка на коленчатом валу маховика соосно картеру на подшипнике внутри замкнутой полости картера необходимы для того, чтобы обеспечить упомянутую раздельность моментов инерции. Образование корректирующего механизма ведомым диском позволит устранить прямой контакт такого механизма с шатуном, что направлено на устранение сложной и малонадежной, как у аналога 1, кинематической связи шатуна с кривошипом через ленту. Заполнение замкнутой полости картера электровязкой жидкостью позволит применить ее способность по изменению своей вязкости для того, чтобы быть своеобразной регулируемой муфтой сцепления между поверхностями картера и маховика. 3 62452010.06.30 Электрическая связь электровязкой жидкости с системой управления величиной вязкости этой жидкости предназначена для обеспечения возможности надежного упомянутого сцепления и регулирования этого сцепления, а значит, и для обеспечения возможности регулирования суммарного момента инерции выходного звена, от которого зависит выходная мощность кривошипно-шатунного механизма в текущем времени вращения коленчатого вала ведомого звена. Это также нужно и для автоматического регулирования момента инерции ведомого звена при его вращении. Совокупность описанных выше отличительных признаков полезной модели направлена на повышение эффективности работы кривошипно-шатунного механизма и на уменьшение влияния источника переменных сил и источника переменной скорости на его выходное звено. В результате должны повысится стабильность работы кривошипно-шатунного механизма, уменьшиться износ кинематических связей, увеличиться его надежность и срок службы. В таком исполнении кривошипно-шатунный механизм в качестве привода может быть приспособлен к различным видам потребителей для работы при различных частотах вращения и крутящих моментах. При этом обеспечивается равенство мощностей или крутящего момента (при заданных частотах вращения в установившемся режиме) между кривошипно-шатунным механизмом и потребителем его энергии, например приводами на автомобилях различного типа и назначения, железнодорожном транспорте, речном флоте,авиации, сельскохозяйственных машинах, строительно-дорожной технике, а также приводами генераторов, компрессов, насосов, бурильных установок и т.д. Таким образом, кривошипно-шатунные механизмы, выполненные согласно полезной модели, найдут широкое использование в народном хозяйстве. Вариантами выполнения полезной модели могут быть исполнения кривошипношатунного механизма с упомянутыми отличительными признаками и добавлением нижеследующих замкнутая полость картера заполнена электровязкой жидкостью в пространстве между картером и маховиком система управления величиной вязкости электровязкой жидкости может быть выполнена в виде устройства, формирующего электрический сигнал для управления напряжением,подводимым к электровязкой жидкости, пропорционально числу оборотов коленчатого вала ведомого звена причем устройство, формирующее электрический сигнал, может быть соединено электрически с картером и коленчатым валом ведомого звена через скользящие контакты,причем маховик подключен к отрицательной, а картер к положительной клеммам этого устройства замкнутая полость картера может быть выполнена герметичной и такая герметичность может быть обеспечена за счет того, что картер закреплен на коленчатом валу ведомого звена через изолирующие прокладки желательно, чтобы масса маховика в 3-5 раз превышала массу картера. Последний вариант выполнения полезной модели, касающийся указанного соотношения масс основан на теории и практике работы инерционных механизмов, которые показывают, в нашем случае, что, чем больше превышение массы маховика относительно картера, тем больше возможность увеличить момент инерции, т.е. повысить эффективность и увеличить степень защиты от источников переменных сил и скорости, а сам процесс затухания колебаний приблизить к апериодическому. Однако большое увеличение массы маховика приводит к увеличению габаритов, а малая масса картера - малому моменту инерции. Поэтому выбран упомянутый рациональный диапазон соотношения масс маховика и картера. 62452010.06.30 Сущность полезной модели поясняется его принципиальной схемой. Кривошипно-шатунный механизм расположен в корпусе 1 потребителя его энергии,например двигателя внутреннего сгорания. Шатун 2 кривошипно-шатунного механизма одним из своих концов связан с ведущим звеном поступательного перемещения, например через палец 3 с поршнем 4. Вторым своим концом шатун 2 связан через подшипник скольжения 5 с кривошипом 6 ведомого звена вращательного движения, например, коленчатого вала 7, который посажен в подшипники 8 корпуса 1. Кривошипно-шатунный механизм включает в себя также корректирующий механизм вращения своего ведомого звена, который расположен без контакта с шатуном 2. Такой корректирующий механизм выполнен в виде закрепленного жестко на коленчатом валу 7 через изолирующие прокладки 9 картера 10 и маховика 11, расположенного внутри картера 10 и закрепленного через подшипник качения 12 на коленчатом валу 7, а также электровязкой жидкости 13 в картере 10, датчика 14 с роликом 15, управляющего блока 16 системы подачи электрического напряжения. Масса маховика 11 значительно больше массы картера 10. Например, для двигателей внутреннего сгорания автомобилей - в 3-5 раз. Применяемая электровязкая жидкость 13 это реологическая среда с дисперсными системами двух или трех фаз в виде мелких твердых частиц - ферромагнетиков, распределенных в вязкой жидкости, которую также называют магнитной. Вал ведомого звена снабжен датчиком 14, измеряющим, например, частоту вращения коленчатого вала 7 через ролик 15, контактирующий с этим валом. Датчик 14 электрически связан с управляющим блоком 16 системы подачи электрического напряжения от источника питания, например от генератора 17. На своем выходе управляющий блок имеет положительную и отрицательную клеммы 18, 19. К положительной клемме 18 подключен провод 20, который соединен со скользящим контактом 21, прижатым к токопроводящей части торцевой поверхности картера 10. К отрицательной клемме 19 подключен провод 22, который соединен со скользящим контактом 23, прижатым к токопроводящей части торцевой поверхности коленчатого вала 7. Таким образом, через эти скользящие контакты 21 и 23 и токопроводящие части маховика 10 и коленчатого вала 7 электровязкая жидкость 12 электрически связана через управляющий блок с генератором 17. Ход поршня 4 ограничен нижней мертвой точкой 24 и верхней мертвой точкой 25. Кривошипно-шатунный механизм работает следующим образом. Осуществляется воздействие на ведущее звено движущей силы, например, от высокого давления газов, образующихся при сгорании топлива. Они давят на поршень 4 и перемещают его вниз относительно корпуса 1 до нижней мертвой точки 24, после этого по инерции поршень устремляется вверх и доходит до верхней мертвой точки 25. Затем цикл такого рабочего хода поршня 4 повторяется. Поступательное движение поршня 4 во время рабочего хода через шатун 2 передается коленчатому валу 7, который, вращаясь, преобразует поступательное движение поршня 4 во вращательное движение ведомого звена потребителя, например колеса автомобиля. Каждому рабочему ходу предшествуют пассивные подготовительные процессы. Например, для двигателя внутреннего сгорания это такты всасывания, выпуска и т.п. Они не приводят во вращение коленчатый вал 7, а осуществляются за счет созданного его крутящего момента. В процессе самого рабочего хода поршня 4 происходит уменьшение воздействия усилия на него около мертвых точек 24 и 25. Учитывая, что кривошипно-шатунный механизм должен осуществлять привод различных устройств, момент инерции коленчатого вала, а следовательно, и его крутящий момент должны быть регулируемыми и увеличенными. Изменение момента инерции ко 5 62452010.06.30 ленчатого вала 7 измеряется датчиком 14 и осуществляется через управляющий блок 16 путем изменения, пропорционально текущей величине оборотов коленчатого вала 7, электрического напряжения, прикладываемого к электровязкой жидкости 13 через скользящие контакты 21, 23 и токопроводящие части картера 10 и маховика 11. Поэтому меняются вязкость и, следовательно, сила сцепления между картером 10 и маховиком 11 и тем самым уменьшается или увеличивается общая вращающаяся масса этих элементов корректирующего механизма. В начальный момент, например при пуске кривошипно-шатунного механизма, начинает вращаться только картер 10. Поэтому момент инерции коленчатого вала 7 незначительный. Это облегчает запуск двигателя. При увеличении числа его оборотов увеличивается управляющее напряжение, подаваемое на магнитную жидкость 13, и увеличивается трение между картером 10 и маховиком 11, т.е. увеличивается общая вращающаяся масса кривошипно-шатунного механизма. В процессе его работы при значительной вязкости магнитной жидкости 13 достигается жесткое сцепление на коленчатом валу 7 маховика 11 с картером 10. Поэтому момент инерции кривошипно-шатунного механизма равен сумме моментов их инерции и коленчатого вала 7. Так как масса маховика значительно превышает массу картера, а момент инерции пропорционален массе, то за счет автоматического увеличения подаваемого напряжения на электровязкую жидкость 13 возможно значительное увеличение момента инерции ведомого звена. Полезная эффективная мощностькривошипно-шатунного механизма, которую можно получить на коленчатом валу 7, зависит от крутящего моментаи частоты вращенияколенчатого вала согласно известной формуле 3. Так как упомянутое увеличение вращающейся массы ведомого звена кривошипношатунного механизма повышает частоту вращения его коленчатого вала 7, то будет обеспечиваться увеличение эффективной мощности кривошипно-шатунного механизма и, в конечном итоге, потребителя его энергии. В предложенном устройстве, в отличие от существующих 1, 2, регулировкой частоты вращения его коленчатого вала 7 с помощью изменения вязкости магнитной жидкости 13 можно более эффективно влиять на эффективность работы кривошипно-шатунного механизма и потребителя его энергии. Это происходит потому, что, согласно вышеприведенной формуле, в этом случае изменяется не только мощность, но и крутящий момент,вследствие того, что величина приложенного управляющего напряжения к магнитной жидкости 13 пропорциональна частоте вращения коленчатого вала 7. Следовательно, это автоматически вызывает увеличение вязкости магнитной жидкости 13 и автоматически вызывает повышение сцепления между картером 10 и маховиком 11 с последующим увеличением общей вращающейся массы кривошипно-шатунного механизма и крутящих моментов его коленчатого вала 7 и потребителя. Обеспечение необходимой мощности потребителя путем изменения числа оборотов и,следовательно, величины крутящего момента практически осуществляется с помощью известных устройств, например регулятора частоты вращения двигателя внутреннего сгорания (не показано). Такой регулятор управляет подачей горючей смеси или топлива в цилиндр двигателя внутреннего сгорания с помощью, например, дроссельной заслонки во впускном трубопроводе (не показаны). Таким образом, регулятором частоты вращения устанавливается необходимая мощность кривошипно-шатунного механизма 7, используемого для привода различных потребителей. В процессе работы кривошипно-шатунного механизма известных устройств 1, 2, за счет непостоянства скорости вращения его ведомого звена, обусловленного источниками переменных сил и переменной скорости, ухудшается стабильность работы конечного по 6 62452010.06.30 требителя энергии. В предложенном же устройстве трение, возникающее между картером 10 и маховиком 11, обусловлено наличием магнитной жидкости 13 и приложенным напряжением, определяющим величину вязкости этой жидкости. Это предотвращает изменение характера вращения картера 11, за счет постоянно вращающегося маховика 10 с большей массой, т.е. будет происходить демпфирование колебаний рабочих характеристик кривошипно-шатунного механизма, вызванных внутренними (износ, нагрев и др.) и внешними (изменение сопротивления выходному звену со стороны потребителя энергии,климатические условия и т.д.) факторами. Чем больше момент инерции ведомого звена,тем больше он защищен от воздействия источника переменных сил и переменной скорости, т.е. увеличивается коэффициент защиты и механический импеданс, характеризующие стабильность работы кривошипно-шатунного механизма. При остановке кривошипно-шатунного механизма уменьшается число оборотов его коленчатого вала 7, напряжение на магнитной жидкости приближается к нулю. Следовательно, массивный маховик 11 по инерции свободно вращается, незначительно сцепляясь с картером 10. В результате чего будут уменьшаться динамические нагрузки на кривошипно-шатунный механизм и будет обеспечиваться плавность его остановки. В процессе работы устройства по полезной модели трение, возникающее между картером 10 и маховиком 11, обусловленное наличием магнитной жидкости 13, приводит также к уменьшению энергии не только вынужденных, но и собственных колебаний кривошипно-шатунного механизма. Одновременно с увеличением массы ведомого звена кривошипно-шатунного механизма увеличивается крутящий момент его коленчатого вала 7. В результате уменьшается и мощность механических потерь, обусловленная пассивными подготовительными процессами. Это, в конечном итоге, уменьшает усилия на поршень 4 около мертвых точек 24, 25 его возвратно-поступательного движения. Такое уменьшение усилий на поршень 4 за счет увеличения крутящего момента коленчатого вала 7, определяемого плавно изменяющейся частотой его вращения при пуске, работе и остановке, увеличивает надежность и стабильность работы кривошипно-шатунного механизма и увеличивает срок его службы. При использовании предложенного устройства необходимая его мощность достигается при меньшем давлении на поршень 4 (по сравнению с существующими механизмами) за счет увеличения крутящего момента на коленчатом валу 7. Все это повышает эффективность и надежность работы кривошипно-шатунного механизма и потребителей его энергии. Для двигателей внутреннего или внешнего сгорания,для которых предназначен кривошипно-шатунный механизм, будет наблюдаться также уменьшение расхода топлива и улучшение их экологических показателей, что с учетом массовости применения таких двигателей на различных транспортных средствах позволит улучшить экологию в целом. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 7
МПК / Метки
МПК: F16H 29/00
Метки: кривошипно-шатунный, механизм
Код ссылки
<a href="https://by.patents.su/7-u6245-krivoshipno-shatunnyjj-mehanizm.html" rel="bookmark" title="База патентов Беларуси">Кривошипно-шатунный механизм</a>
Кривошипно-шатунный механизм
Номер патента: 7199
Опубликовано: 30.09.2005
Автор: Клаус Пенниг
МПК: G01F 15/04, F16H 21/18, G01F 3/02...
Метки: механизм, кривошипно-шатунный
Текст:
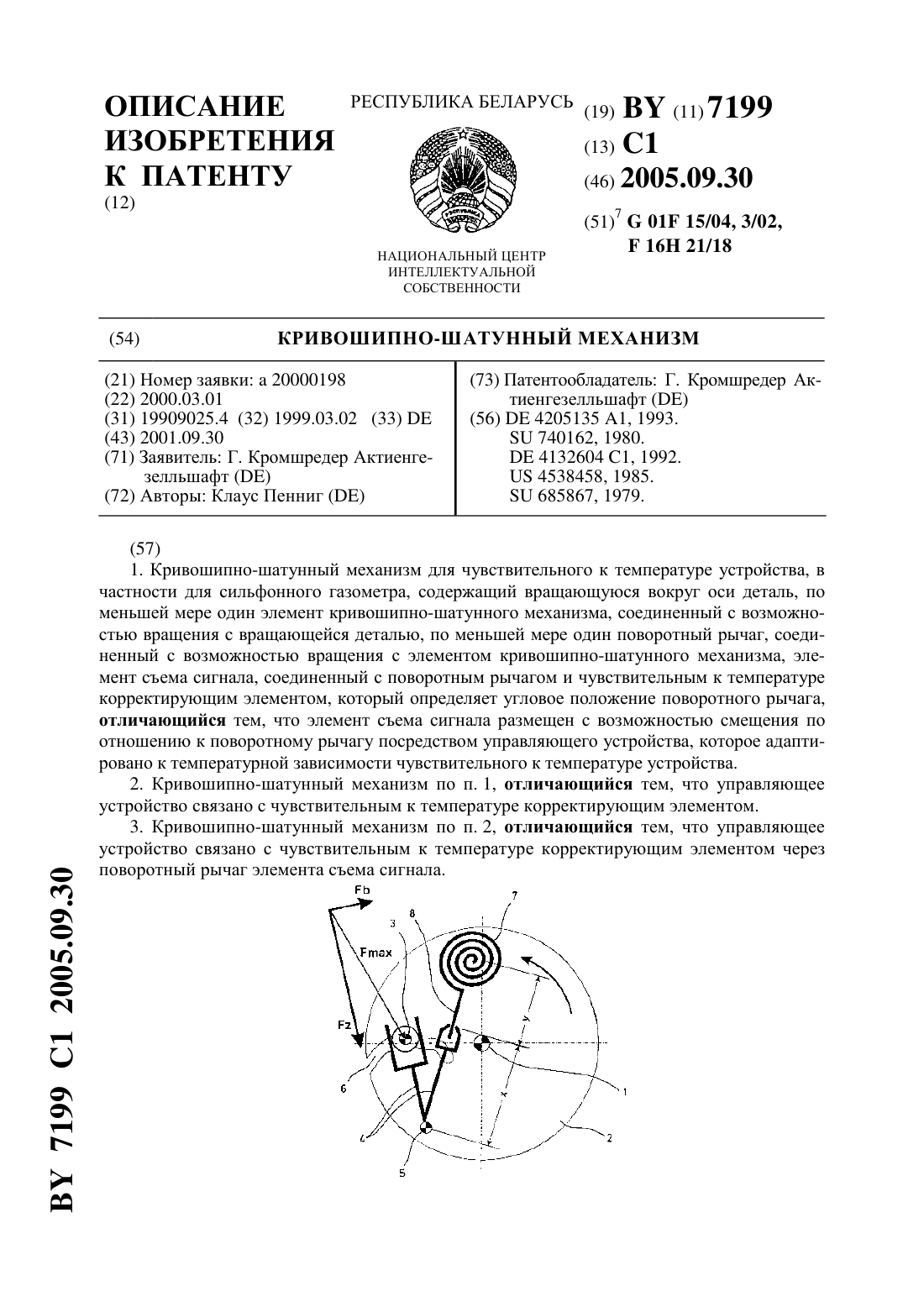
...для данного прибора оптимизация температурной корректировки. При дальнейшем развитии этого изобретения предлагается связывать управляющее устройство с чувствительным к температуре корректирующим элементом, причем эта 3 7199 1 2005.09.30 связь предпочтительно осуществляется через поворотный рычаг элемента съема сигнала,угловое положение которого определяется корректирующим элементом и тем самым представляет зависящий от температуры...
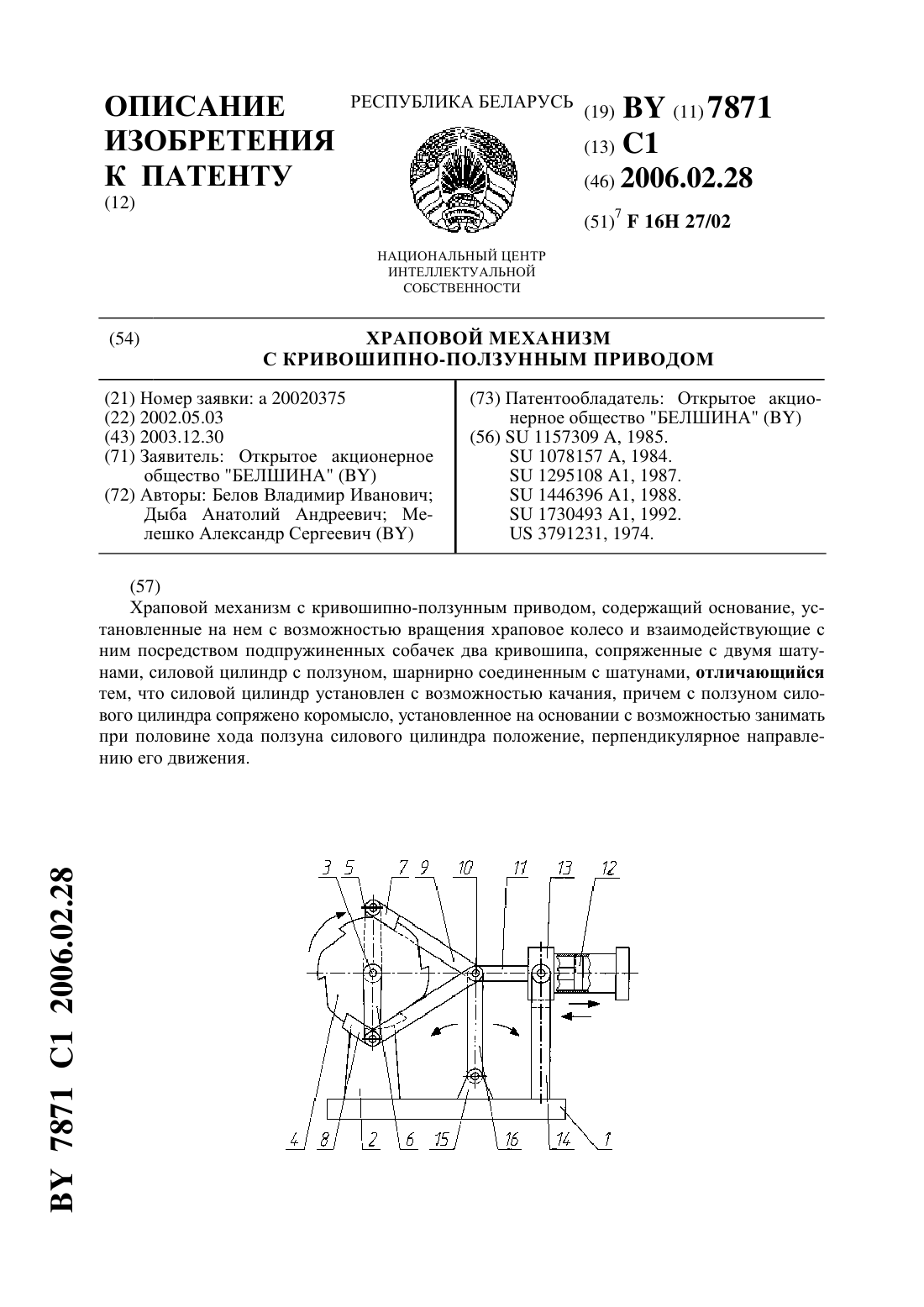
Храповой механизм с кривошипно-ползунным приводом
Номер патента: 7871
Опубликовано: 28.02.2006
Авторы: Дыба Анатолий Андреевич, Мелешко Александр Сергеевич, Белов Владимир Иванович
МПК: F16H 27/02
Метки: храповой, кривошипно-ползунным, механизм, приводом
Текст:
...износу. Задачей изобретения является повышение надежности работы механизма путем снижения износа силового цилиндра. Сущность изобретения состоит в том, что храповой механизм с кривошипноползунным приводом содержит основание, установленные на нем с возможностью вращения храповое колесо и взаимодействующие с ним посредством подпружиненных собачек два кривошипа, сопряженные с двумя шатунами, силовой цилиндр с ползуном, шарнирно соединенным с...
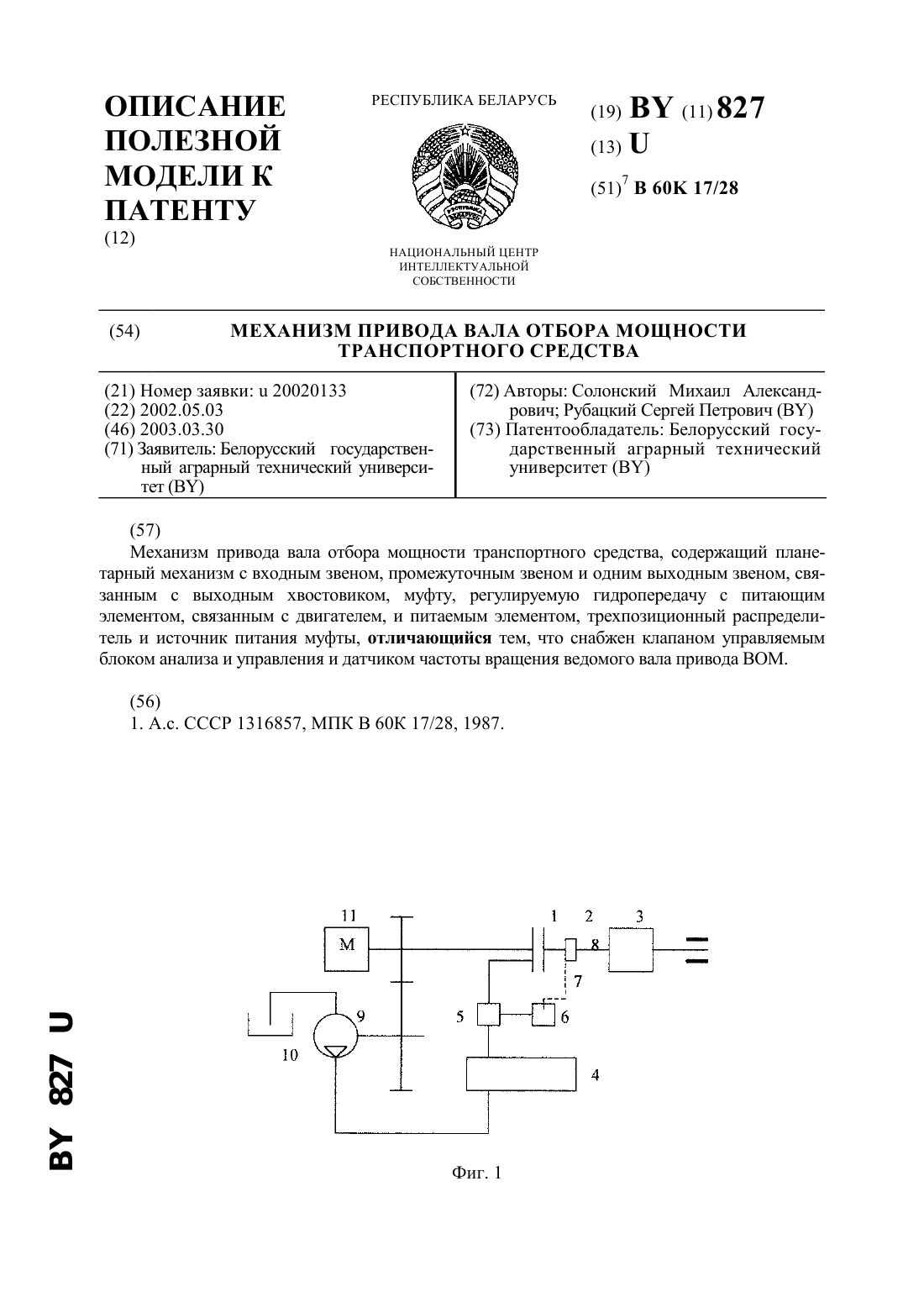
Механизм привода вала отбора мощности транспортного средства
Номер патента: U 827
Опубликовано: 30.03.2003
Авторы: Солонский Михаил Александрович, Рубацкий Сергей Петрович
МПК: B60K 17/28
Метки: мощности, вала, механизм, транспортного, отбора, средства, привода
Текст:
...связанным с выходным хвостовиком, муфту, регулируемую гидропередачу с питающим элементом, связанным с двигателем, и питаемым элементом,трехпозиционный распределитель и источник питания муфты, снабжен клапаном управляемым блоком анализа и управления, датчиком частоты вращения ведомого вала привода ВОМ. На фиг. 1 изображено предлагаемое устройство. Устройство содержит гидравлическую фрикционную муфту 1, передающую при включении вращение...
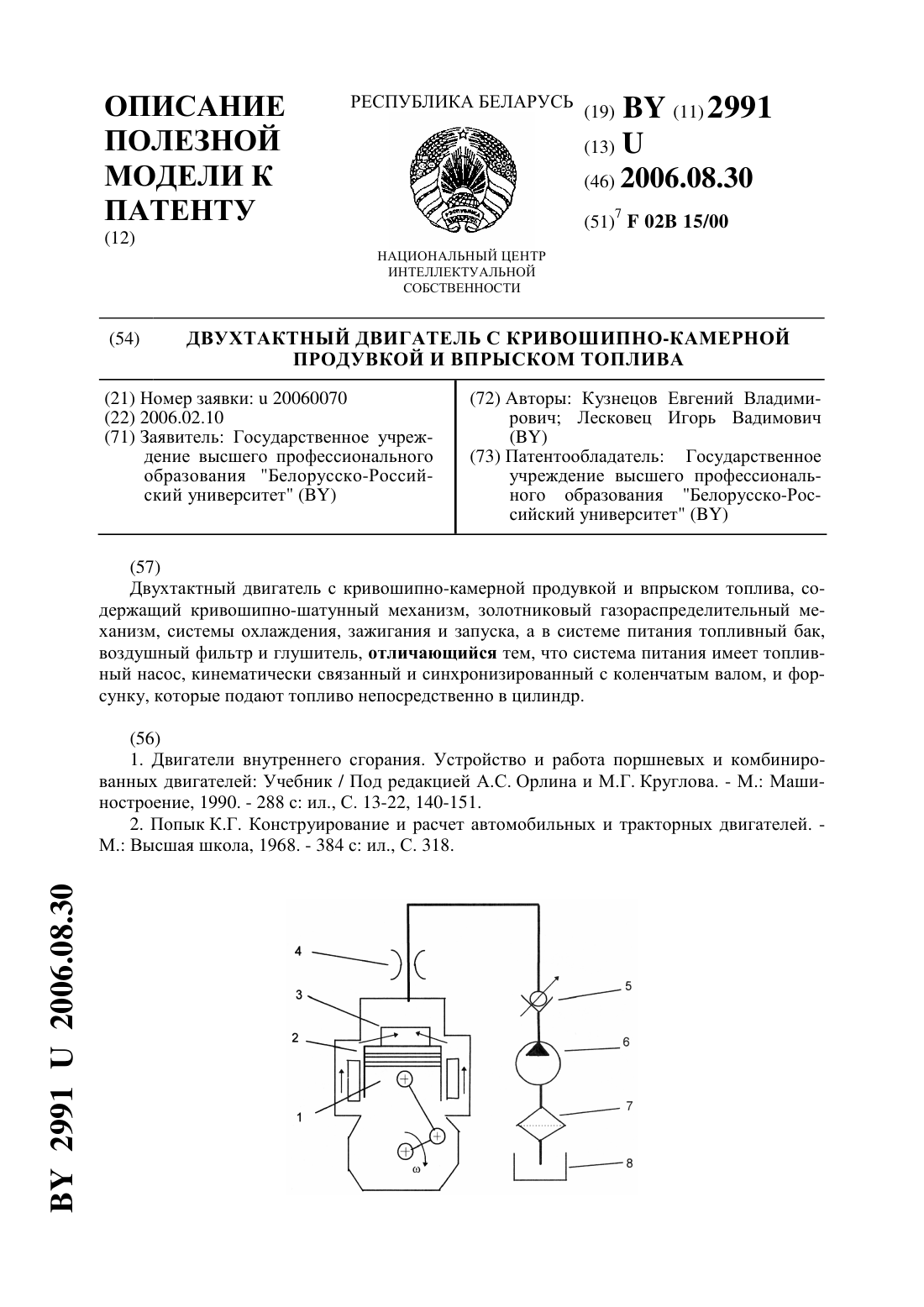
Двухтактный двигатель с кривошипно-камерной продувкой и впрыском топлива
Номер патента: U 2991
Опубликовано: 30.08.2006
Авторы: Лесковец Игорь Вадимович, Кузнецов Евгений Владимирович
МПК: F02B 15/00
Метки: продувкой, кривошипно-камерной, впрыском, двигатель, топлива, двухтактный
Текст:
...глушитель, согласно полезной модели,система питания имеет топливный насос, кинематически связанный и синхронизированный с коленчатым валом, и форсунку, которые подают топливо непосредственно в цилиндр. Достижение задач обеспечивается за счет применения непосредственного впрыска топлива в цилиндр в конце процесса продувки и начале сжатия, то есть без потерь топлива при продувке цилиндра, которая в данном случае осуществляется воздухом. В...
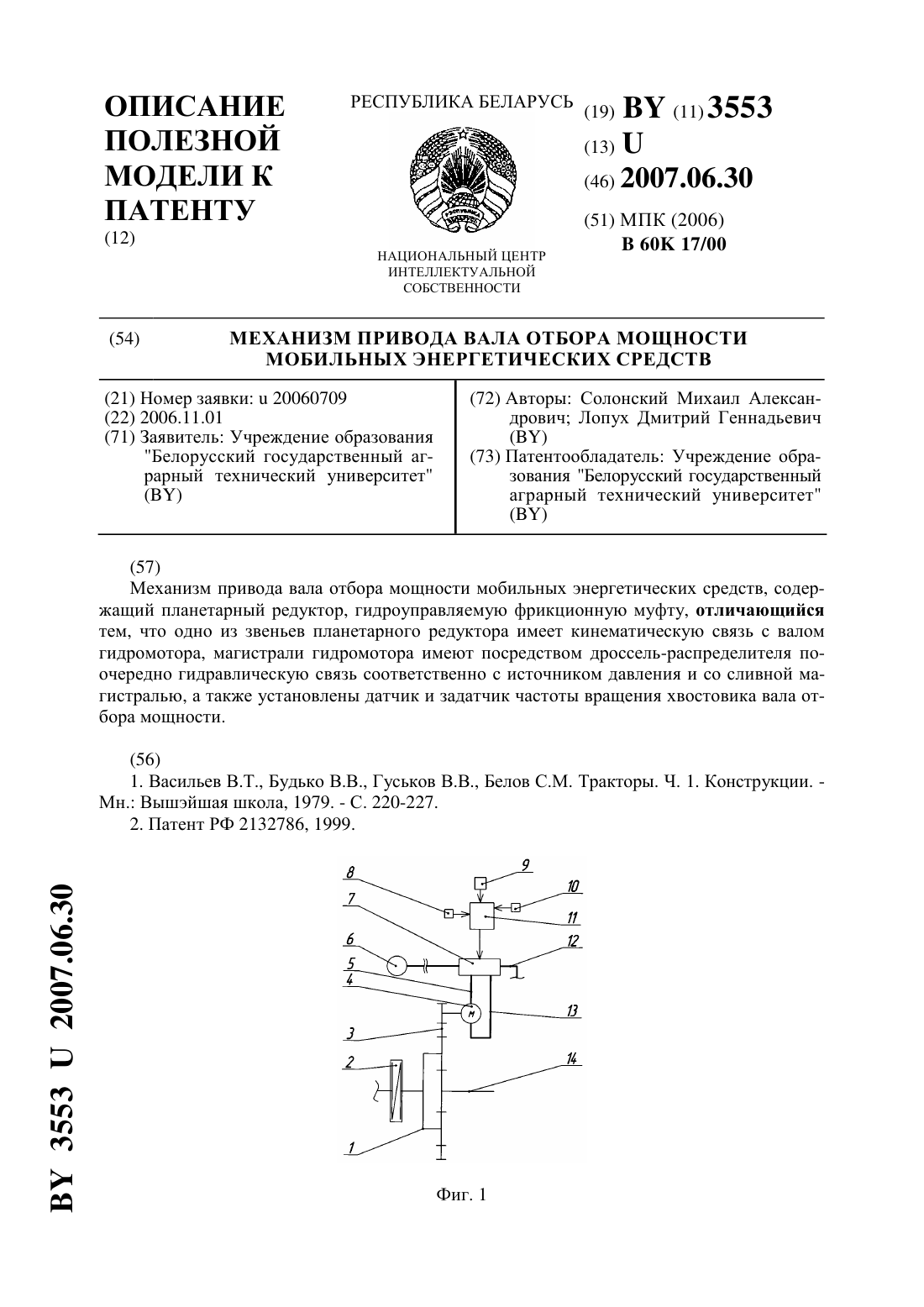
Механизм привода вала отбора мощности мобильных энергетических средств
Номер патента: U 3553
Опубликовано: 30.06.2007
Авторы: Лопух Дмитрий Геннадьевич, Солонский Михаил Александрович
МПК: B60K 17/00
Метки: мобильных, механизм, отбора, привода, вала, мощности, энергетических, средств
Текст:
...средств. На фиг. 2 изображен алгоритм работы механизма привода вала отбора мощности мобильных энергетических средств. Механизм привода вала отбора мощности мобильных энергетических средств включает планетарный редуктор 1, гидроуправляемую фрикционную муфту 2, звено планетарного редуктора 3, гидромотор 4, магистраль гидромотора А 5, источник давления 6, дроссель-распределитель 7, задатчик частоты вращения хвостовика вала отбора мощности 8,орган...
Предыдущий патент: Кремниевая эпитаксиальная структура ориентации (111)
Следующий патент: Комбайн для уборки и сушки зерна
Случайный патент: Композиция для внутренних деталей обуви