Привод сцеплений шасси в составе автопоезда
Номер патента: 8966
Опубликовано: 28.02.2007
Авторы: Захарик Юрий Михайлович, Ракомсин Александр Петрович, Корсаков Владимир Владимирович, Захарик Андрей Михайлович, Захарик Александр Михайлович
Текст
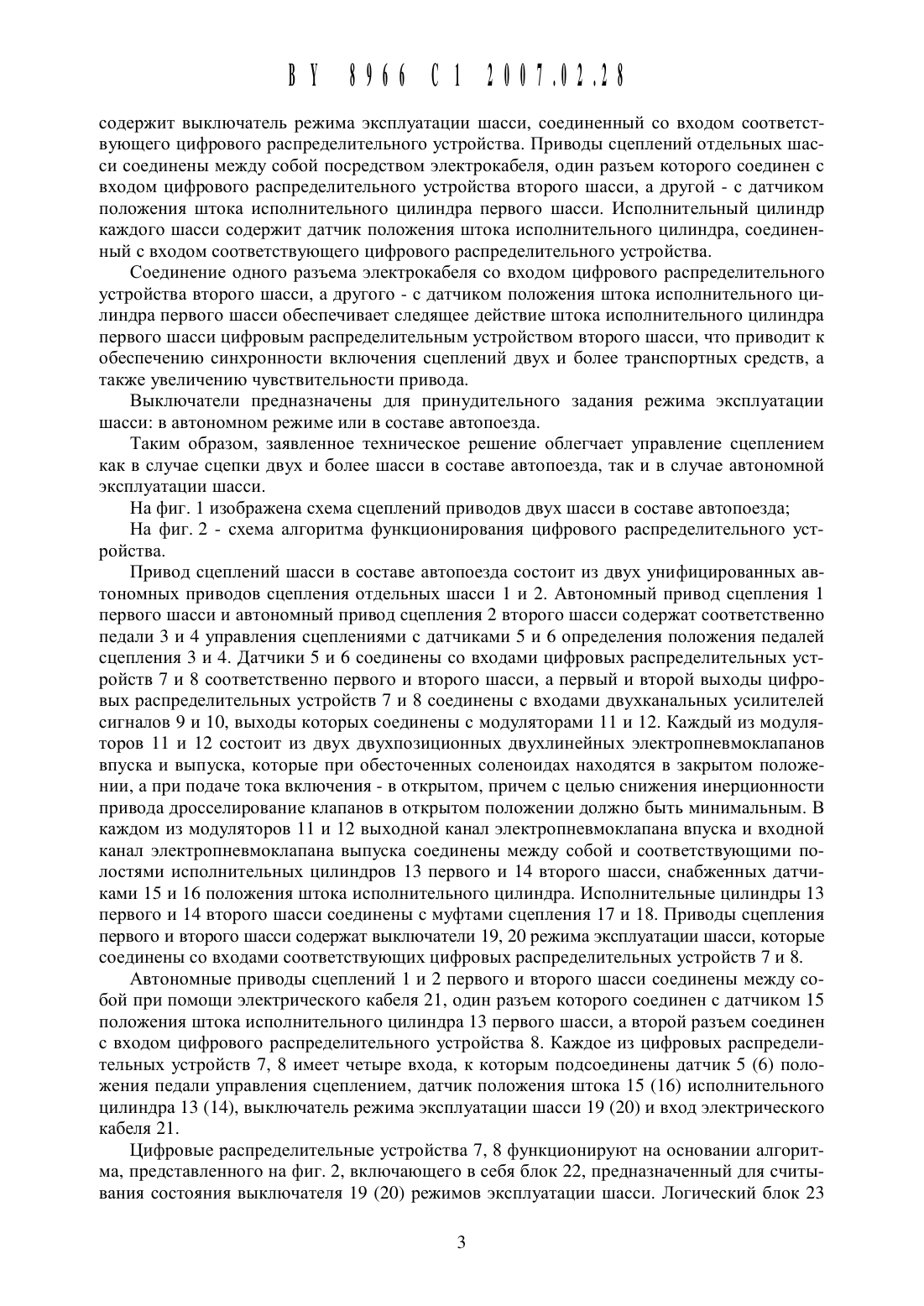
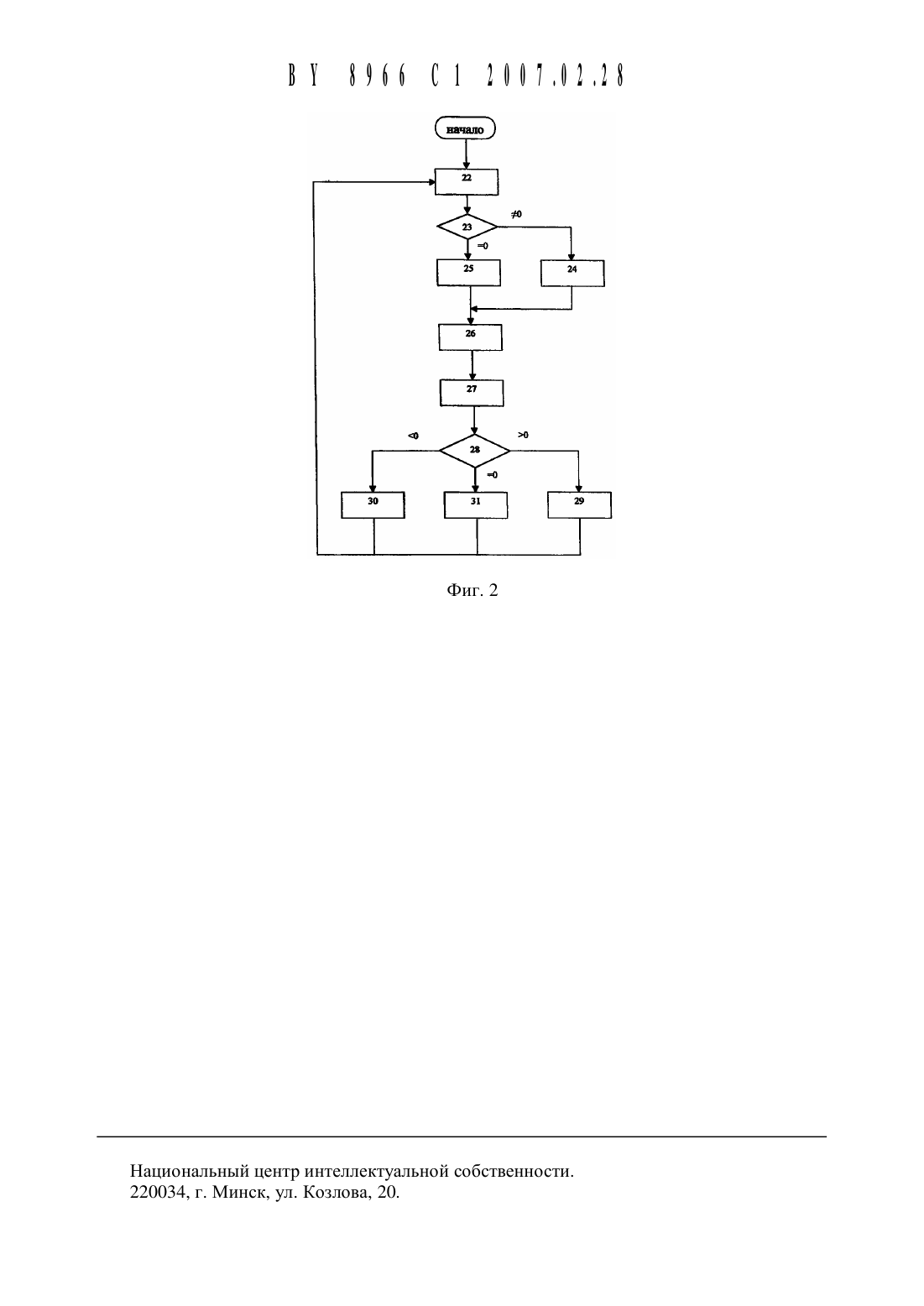
Изобретение относится К области транспортного машиностроения, а более конкретно К устройствам для автоматического управления сцеплениями щасси в составе автопоезда.Известно устройство автоматического управления сцеплением транспортного средства,содержащее датчик угловой скорости вала двигателя, подключенный к частотноаналоговому преобразователю, связанному через регулятор тока и усилитель тока с катушкой электромагнита следящего действия, якорь которого кинематически связан с приводом сцепления, а также выключатель принудительного выключения сцепления, расположенный на рычаге переключения передач и связанный с катушкой электромагнита следящего действия 1. Устройство также снабжено бинарным датчиком исходного положения педали управления дроссельной заслонкой карбюратора, ключевым элементом, генератором одиночных импульсов, ключевым усилителем тока, устройством управления запуском генератора одиночных импульсов, датчиком скорости транспортного средства. Частотноаналоговый преобразователь выполнен двухвходовым, катушка электромагнита следящего действия выполнена с управляющей и форсажной обмотками, последняя из которых включена в выходную цепь ключевого усилителя тока, вход которого подключен к вь 1 ходу генератора одиночных импульсов, вход которого присоединен к выходу устройства управления запуском генератора одиночных импульсов, выход которого соединен через первый диод с первым входом регулятора тока. Второй вход регулятора тока связан через второй диод с выходом частотно-аналогового преобразователя. Выход усилителя тока подключен к управляющей обмотке катушки электромагнита следящего действия, неинвертирующий выход бинарного датчика через ключевой элемент подключен к первому входу регулятора тока, инвертирующий выход бинарного датчика связан с первым входом устройства управления запуском генератора одиночных импульсов, ко второму входу которого подключен выключатель принудительного выключения сцепления.Недостатком известного устройства является отсутствие в его составе цифрового распределительного устройства, что не обеспечивает синхронности и следящего действия приводов сцепления при использовании их в составе автопоезда.Наиболее близким техническим рещением является привод муфты сцепления, содержащий педаль, редуктор давления, исполнительный пневматический цилиндр, цифровое распределительное устройство и датчик положения педали, электрически соединенный с цифровым распределительным устройством 2. Цифровое распределительное устройство через два электрических канала и последовательно соединенный с ними двухканальный усилитель связано с электромагнитами электропневмоклапанов впуска и выпуска модулятора. Входной и выходной каналы электропневмоклапана модулятора соединены между собой и исполнительным пневматическим цилиндром. Редуктор давления связан с входным каналом электропневмоклапана впуска, а выходной канал электропневмоклапана вь 1 пуска соединен с атмосферой.Известный привод обеспечивает плавное трогание щасси с места и плавное переключение передач при автономном использовании. Однако он не предназначен для использования в составе автопоезда и не обеспечивает одновременного и синхронного управления сцеплениями двух и более транспортных средств.Задача, рещаемая изобретением, - расщирение функциональных возможностей привода путем обеспечения регулируемого включения сцеплений в составе автопоезда.Поставленная задача достигается тем, что в приводе сцеплений щасси в составе автопоезда, содержащий автономные приводы сцепления отдельных щасси, каждый из которых содержит педаль управления сцеплением, датчик положения педали, соединенный с цифровым распределительным устройством, которое посредством двух электрических каналов и последовательно соединенным с ними двухканальным усилителем связано с электромагнитами электропневмоклапанов впуска и выпуска модулятора, причем выходной канал электропневмоклапана впуска и входной канал электропневмоклапана выпуска соединены между собой и с исполнительным цилиндром, привод сцеплений каждого щассисодержит выключатель режима эксплуатации щасси, соединенный со входом соответствующего цифрового распределительного устройства. Приводы сцеплений отдельных щасси соединены между собой посредством электрокабеля, один разъем которого соединен с входом цифрового распределительного устройства второго щасси, а другой - с датчиком положения щтока исполнительного цилиндра первого щасси. Исполнительный цилиндр каждого щасси содержит датчик положения щтока исполнительного цилиндра, соединенный с входом соответствующего цифрового распределительного устройства.Соединение одного разъема электрокабеля со входом цифрового распределительного устройства второго щасси, а другого - с датчиком положения щтока исполнительного цилиндра первого щасси обеспечивает следящее действие щтока исполнительного цилиндра первого щасси Цифровым распределительным устройством второго щасси, что приводит к обеспечению синхронности включения сцеплений двух и более транспортных средств, а также увеличению чувствительности привода.Выключатели предназначены для принудительного задания режима эксплуатации щасси в автономном режиме или в составе автопоезда.Таким образом, заявленное техническое решение облегчает управление сцеплением как в случае сцепки двух и более щасси в составе автопоезда, так и в случае автономной эксплуатации щасси.На фиг. 1 изображена схема сцеплений приводов двух щасси в составе автопоездаНа фиг. 2 - схема алгоритма функционирования цифрового распределительного устройства.Привод сцеплений щасси в составе автопоезда состоит из двух унифицированных автономных приводов сцепления отдельных щасси 1 и 2. Автономный привод сцепления 1 первого щасси и автономный привод сцепления 2 второго щасси содержат соответственно педали 3 и 4 управления сцеплениями с датчиками 5 и 6 определения положения педалей сцепления 3 и 4. Датчики 5 и 6 соединены со входами цифровых распределительных устройств 7 и 8 соответственно первого и второго щасси, а первый и второй выходы цифровых распределительных устройств 7 и 8 соединены с входами двухканальных усилителей сигналов 9 и 10, выходы которых соединены с модуляторами 11 и 12. Каждый из модуляторов 11 и 12 состоит из двух двухпозиционных двухлинейных электропневмоклапанов впуска и выпуска, которые при обесточенных соленоидах находятся в закрытом положении, а при подаче тока включения - в открытом, причем с целью снижения инерционности привода дросселирование клапанов в открытом положении должно быть минимальным. В каждом из модуляторов 11 и 12 выходной канал электропневмоклапана впуска и входной канал электропневмоклапана выпуска соединены между собой и соответствующими полостями исполнительных цилиндров 13 первого и 14 второго щасси, снабженных датчиками 15 и 16 положения щтока исполнительного цилиндра. Исполнительные цилиндры 13 первого и 14 второго щасси соединены с муфтами сцепления 17 и 18. Приводы сцепления первого и второго щасси содержат выключатели 19, 20 режима эксплуатации щасси, которые соединены со входами соответствующих цифровых распределительных устройств 7 и 8.Автономные приводы сцеплений 1 и 2 первого и второго щасси соединены между собой при помощи электрического кабеля 21, один разъем которого соединен с датчиком 15 положения щтока исполнительного цилиндра 13 первого щасси, а второй разъем соединен с входом цифрового распределительного устройства 8. Каждое из цифровых распределительных устройств 7, 8 имеет четыре входа, к которым подсоединены датчик 5 (6) положения педали управления сцеплением, датчик положения щтока 15 (16) исполнительного цилиндра 13 (14), выключатель режима эксплуатации щасси 19 (20) и вход электрического кабеля 21.Цифровые распределительные устройства 7, 8 функционируют на основании алгоритма, представленного на фиг. 2, включающего в себя блок 22, предназначенный для счить 1 вания состояния выключателя 19 (20) режимов эксплуатации щасси. Логический блок 23предназначен для сравнения считанного значения блока 22 с нулевым значением, а блок 24 для считывания показаний соединенного при сцепке датчика 15 (16) положения штока исполнительного цилиндра 13 (14). Блок 25 предназначен для считывания показаний датчика 5 (6) положения педали 3 (4) управления сцеплением. Блок 26 предназначен для накопления считанной текущей информации на предшествующем шаге работы цифрового распределительного устройства 7(8), значение которой присваивается задатчику. Блок 27 предназначен для считывания показаний датчика 15 ( 16) положения штока исполнительного цилиндра 13 (14). Логический блок 28 является блоком сравнения показаний информации блоков 26 и 27. Блоки 29 и 30 предназначены для преобразования сигнала разности показаний блоков 27 и 26 в частоту следования импульсов, которая подается на двухканальный усилитель 9 (10), а блок 31 - для отключения входных сигналов усилителя 9 ( 10). Блоки управления 29, 30 и 31 связаны на входе с блоком сравнения 28 и являются вь 1 ходными блоками цифрового распределительного устройства 7 (8).Привод сцепления 1 (2) в составе автопоезда работает следующим образом.Перед началом работы водитель соединяет автономные приводы 1 и 2 между собой электрическим кабелем 21, при этом один разъем электрического кабеля 21 соединен с датчиком 15 положения штока исполнительного цилиндра 13, а второй - с входом цифрового распределительного устройства 8 второго шасси. При этом включается выключатель 20 режима эксплуатации второго шасси.Управление сцеплением осуществляют с первого шасси. В начале работы, когда педаль 3 управления сцеплением полностью отпущена, сцепление находится во включенном состоянии.При нажатии на педаль 3 управления сцеплением первого шасси 1 сигнал от датчика 5 поступает в цифровое распределительное устройство 7 первого шасси. В это время вь 1 ключатель 19 режима эксплуатации первого шасси находится в выключенном состоянии(нулевое значение). Блок 22 считывает состояние выключателя 19, так как значение равно 0,то блок 23 передает управление блоку 25 и осуществляется считывание показаний датчика 5 положения педали 3 управления сцеплением. Затем, в соответствии с функционированием алгоритма цифрового распределительного устройства 7 считанные показания блока 25 присваиваются блоком 26 в качестве задатчика. После чего блок 27 считывает показания датчика 15 положения штока исполнительного цилиндра 13 первого шасси. Исходное положение полностью включенного сцепления принято нулевым. После сравнения показаний блоков 26 и 27 и с учетом того, что указанная разность больше нуля, управление передается блоку 29, который преобразует сигнал разности показаний блоков 26 и 27 в частоту следования импульсов, которая в свою очередь подается на соответствующий канал двухканального усилителя 9. Усиленный частотный сигнал затем подается на электромагнитный клапан выпуска модулятора 11. Происходит постепенное, за счет импульсного способа управления, наполнение воздухом рабочей полости исполнительного цилиндра 9 первого шасси, что соответствует процессу плавного выключения сцепления первого шасси.Одновременно сигнал от датчика 15 положения штока исполнительного цилиндра 13 первого шасси через соединенный электрический кабель 21 подается на цифровое распределительное устройство 8 второго шасси. Так как выключатель 20 режима эксплуатации этого шасси находится во включенном состоянии (ненулевое значение), то в цифровом распределительном устройстве 8 блок 22 считывает состояние выключателя 19, так как значение не равно 0, то блок 23 передает управление блоку 24 и осуществляется счить 1 вание показаний датчика 15 положения штока исполнительного цилиндра 13 первого шасси.После чего в соответствии с функционированием алгоритма цифрового распределительного устройства 8 считанные показания блока 24 присваиваются блоком 26 в качестве задатчика.Блок 27 считывает показания датчика 16 положения щтока Исполнительного цилиндра 14 второго щасси. Исходное положение полностью включенного сцепления принято нулевым. После сравнения показаний блоков 26 и 27 управление передается блоку 29, так как указанная разность больше нуля. Блок 29 преобразует сигнал разности показаний блоков 26 и 27 в частоту следования импульсов, которая подается на соответствующий канал двухканального усилителя 10. Усиленный Частотный сигнал затем подается на электромагнитный клапан выпуска модулятора 12. Происходит постепенное, за счет импульсного способа управления, наполнение воздухом рабочей полости исполнительного цилиндра 14, что соответствует процессу плавного выключения сцепления второго щасси.Таким образом, синхронизация выключения двух сцеплений обеспечивается тем, что задатчиком для привода сцепления второго щасси является датчик 15 положения щтока исполнительного цилиндра 13 первого щасси.Когда педаль управления сцеплением 3 остановлена в каком-то промежуточном положении, в соответствии с функционированием алгоритма цифрового распределительного устройства 7 первого щасси показания задатчика блока 26 остаются постоянными. При считывании блоком 27 показаний датчика положения щтока исполнительного цилиндра 13,равных показаниям задатчика блока 26 (что произойдет в случае, если перемещение Штока исполнительного цилиндра будет точно соответствовать заданному перемещению педали управления сцеплением), блок 28 передает управление блоку 31. Блок 31 отдает команду на обесточивание каналов усилителя 9.В результате электропневмоклапана впуска и выпуска модулятора 11 находятся в закрытом положении, и привод сцепления 1 первого щасси находится в заданном промежуточном положении, соответствующем промежуточному положению педали 3 управления сцеплением. Аналогично устанавливается в заданном промежуточном положении привод сцепления 2 второго щасси.При отпускании педали 3 управления сцеплением разность показаний блоков 26 и 27 становится меньще нуля. В этом случае управление передается блоку 30. В результате воздух постепенно поступает в рабочую полость исполнительных цилиндров 13 и 14, муфты сцепления 17, 18 медленно выключаются. В остальном работа привода сцепления в режиме отпускания педали аналогична работе привода при нажатии педали.Таким образом, следящее управление по положению педали управления сцеплением осуществляется логическим блоком сравнения 28. Реализация плавного трогания автопоезда с места обеспечивается блоками 29 и 30 за счет импульсного способа управления.Описанные режимы позволяют осуществить маневрирование двух и более щасси в составе автопоезда при парковке, в гараже, при маневрировании в стесненных и сложных дорожных условиях.Для автономной эксплуатации двух щасси достаточно разъединить кабель 21 и установить выключатель 19 (20) режима работы первого и второго щасси в выключенное положение. В этом случае работа привода сцепления автономных щасси аналогична работе первого щасси в составе автопоезда.1. Патент РФ Не 2090384, МПК В 60 К 17/02, заявл. 19.10.93, опубл. 20.09.97. 2. А.с. СССР Не 1787818, МПК В 60 К 23/02, заявл. 25.12.89, опубл. 15.01.93 // Бюл.
МПК / Метки
МПК: B60K 23/02
Метки: составе, автопоезда, привод, шасси, сцеплений
Код ссылки
<a href="https://by.patents.su/6-8966-privod-sceplenijj-shassi-v-sostave-avtopoezda.html" rel="bookmark" title="База патентов Беларуси">Привод сцеплений шасси в составе автопоезда</a>
Система управления сцеплениями многозвенного шасси
Номер патента: U 1451
Опубликовано: 30.06.2004
Авторы: Захарик Юрий Михайлович, Захарик Александр Михайлович
МПК: B60K 23/02
Метки: шасси, сцеплениями, управления, многозвенного, система
Текст:
...поочередно соединенными со сливом, соленоиды которых последовательно соединены с включенными встречно обмотками датчиков скоростей вращения валов сцеплений, дополнительно содержит педаль управления двигателем и датчик педали управления двигателем, соединенного с распределителями, при этом распределители выполнены пропорционального типа. Наличие в системе управления сцеплениями многозвенных шасси педали управления двигателем и датчика педали...
Гидропневматический привод сцепления транспортного средства
Номер патента: 1665
Опубликовано: 30.03.1997
Авторы: Евстратовский Александр Владимирович, Захарик Андрей Михайлович, Торгонский Анатолий Романович, Лобачевский Леонид Борисович
МПК: B60K 23/02
Метки: гидропневматический, транспортного, сцепления, средства, привод
Текст:
...упрощении конструкции благодаря исключению оттяжной пружины рычага. Поставленная задача выполняется благодаря тому, что в гидропневматическом приводе сцепления транспортного средства, содержащем педаль сцепления с оттяжной пружиной, главный гидроцилиндр, сообщенный с пневмоусилителем, снабженным подпружиненным поршнем, кинематически связанным с рычагом вала вилки выключения сцепления, и выжимной подшипник, установленный с возможностью...
Шахтное самоходное шасси
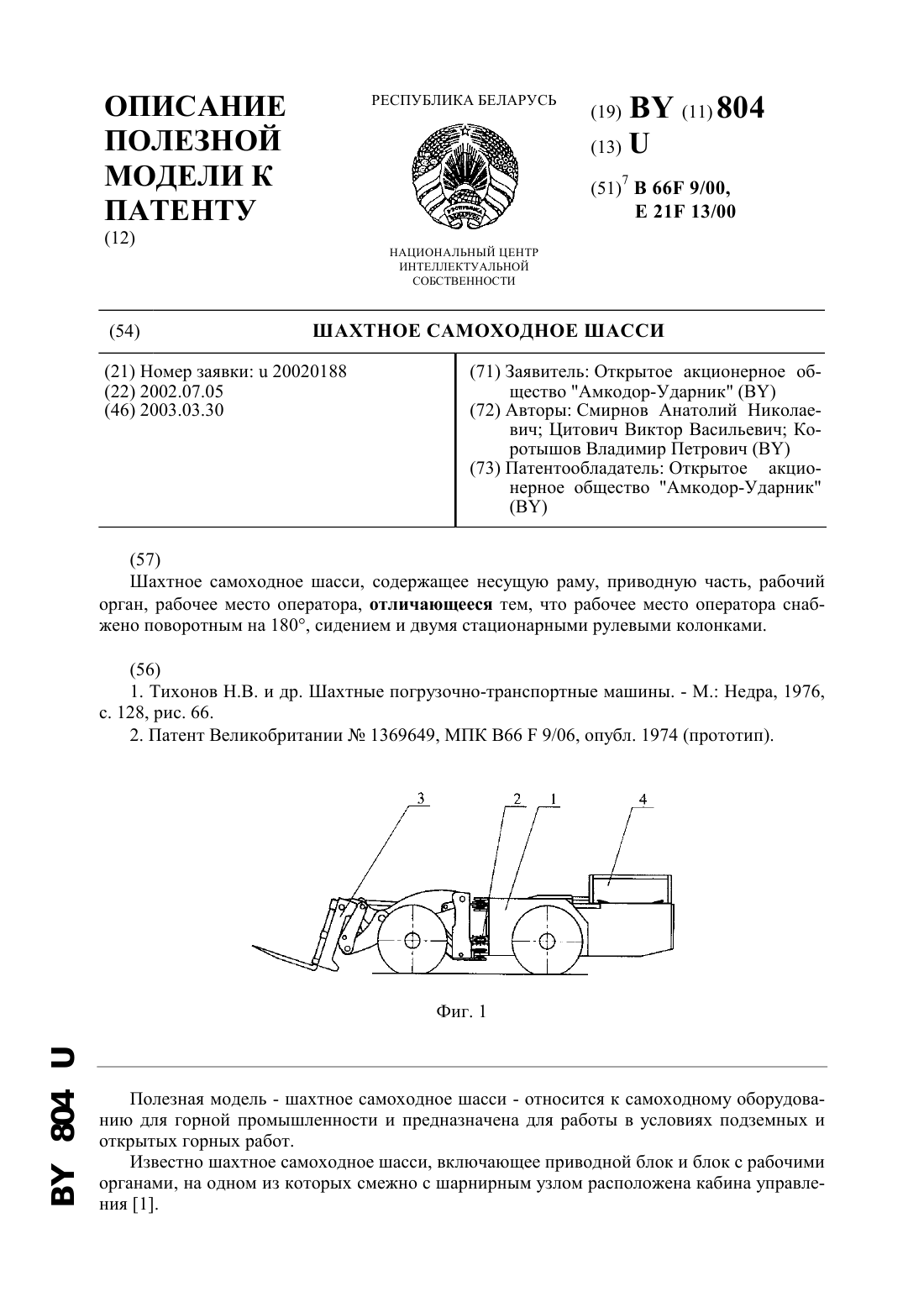
Номер патента: U 804
Опубликовано: 30.03.2003
Авторы: Цитович Виктор Васильевич, Коротышов Владимир Петрович, Смирнов Анатолий Николаевич
МПК: B66F 9/00, E21F 13/00
Метки: шахтное, самоходное, шасси
Текст:
...выполнены с возможностью поворота на 180, вокруг вертикальной оси, что обеспечивает смещение оператора к приводной части или к рабочему органу 2. Недостатком указанного устройства является то, что сложная конструкция поворота кабины оператора исключает возможность применения данной конструкции в шахтных условиях. Задачей полезной модели является упрощение конструкции и обеспечение применения таковой в шахтных условиях. Шахтное самоходное...
Привод выключения сцепления
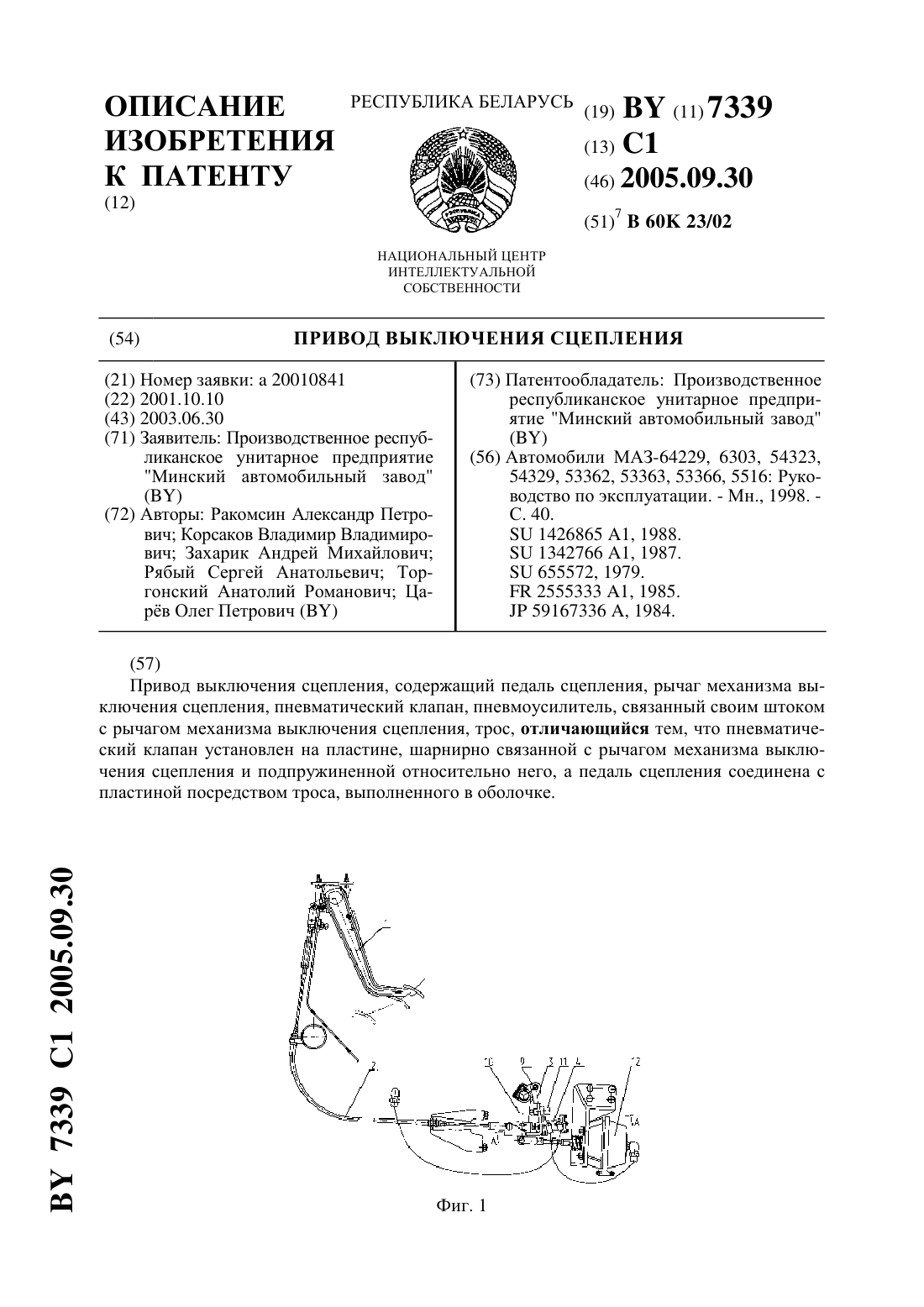
Номер патента: 7339
Опубликовано: 30.09.2005
Авторы: Корсаков Владимир Владимирович, Царёв Олег Петрович, Ракомсин Александр Петрович, Торгонский Анатолий Романович, Рябый Сергей Анатольевич, Захарик Андрей Михайлович
МПК: B60K 23/02
Метки: сцепления, выключения, привод
Текст:
...рычаг механизма выключения сцепления, пневматический клапан, пневмоусилитель, связанный своим штоком с рычагом механизма выключения сцепления, трос, пневматический клапан установлен на пластине, шарнирно связанной с рычагом механизма выключения сцепления и подпружиненной относительно него, а педаль сцепления соединена с пластиной посредством троса, выполненного в оболочке. Таким образом, в предлагаемом приводе выключения сцепления вместо...
Шасси самоходное тракторное
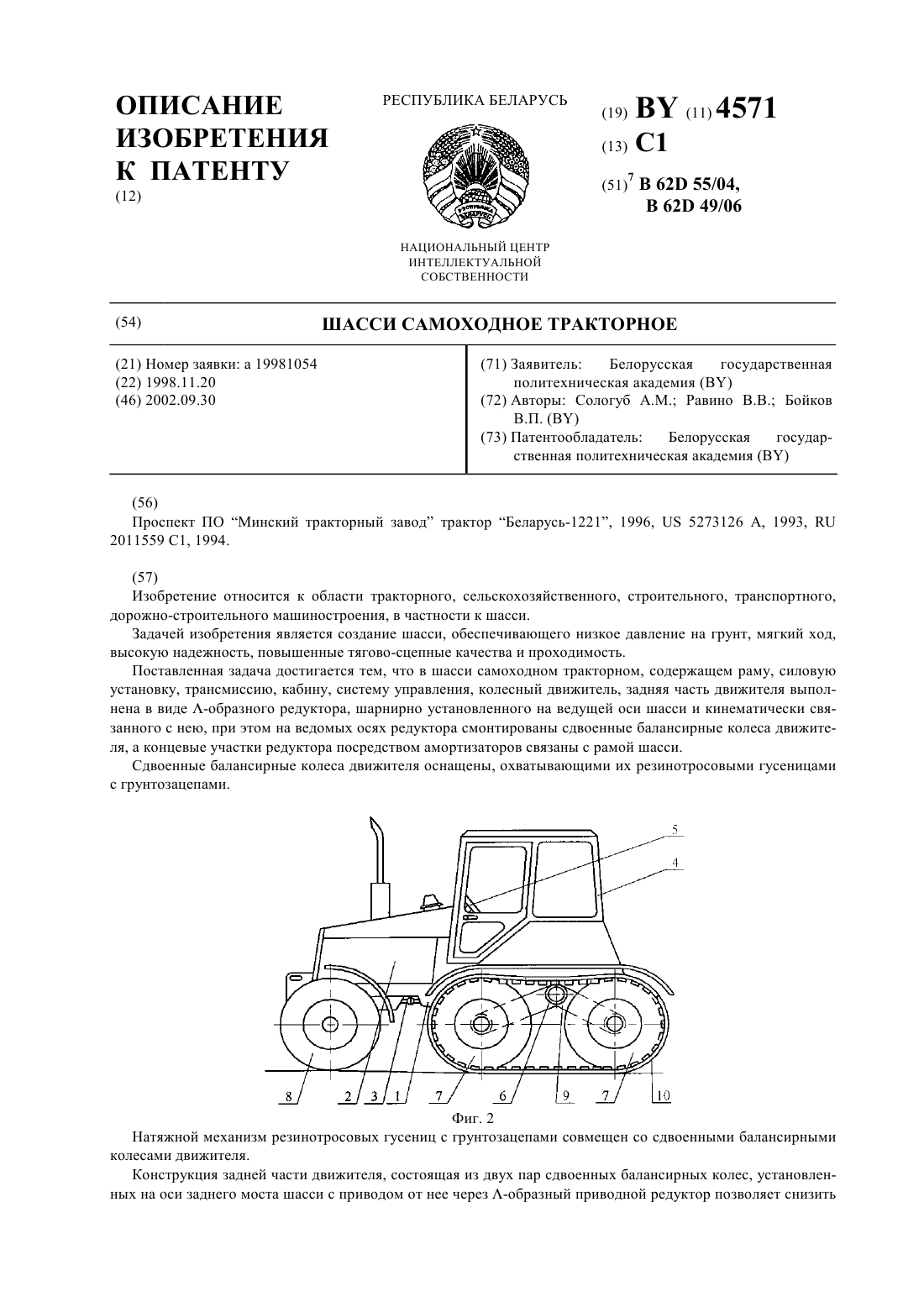
Номер патента: 4571
Опубликовано: 30.09.2002
Авторы: Бойков Владимир Петрович, Сологуб Александр Михайлович, Равино Виктор Валерьевич
МПК: B62D 55/04, B62D 49/06
Метки: тракторное, шасси, самоходное
Текст:
...амортизаторов связаны с рамой шасси. Сдвоенные балансирные колеса движителя оснащены охватывающими их резинотросовыми гусеницами с грунтозацепами. Натяжной механизм резинотросовых гусениц с грунтозацепами совмещен со сдвоенными балансирными колесами движителя. Конструкция задней части движителя, состоящая из двух пар сдвоенных балансирных колес, установленных на оси заднего моста шасси с приводом от нее через -образный приводной редуктор,...
Предыдущий патент: Способ получения канифольного модифицированного продукта для проклейки бумаги и картона в нейтральной среде
Следующий патент: Металлизация полупроводникового прибора
Случайный патент: Аэродромно-дорожная плита покрытия