Система стабилизации линии визирования
Номер патента: 1407
Опубликовано: 16.12.1996
Авторы: Синаторов Михаил Петрович, Литвяков Сергей Борисович, Павлович Дмитрий Иосифович, Батюшков Валентин Вениаминович, Покрышкин Владимир Иванович
Текст
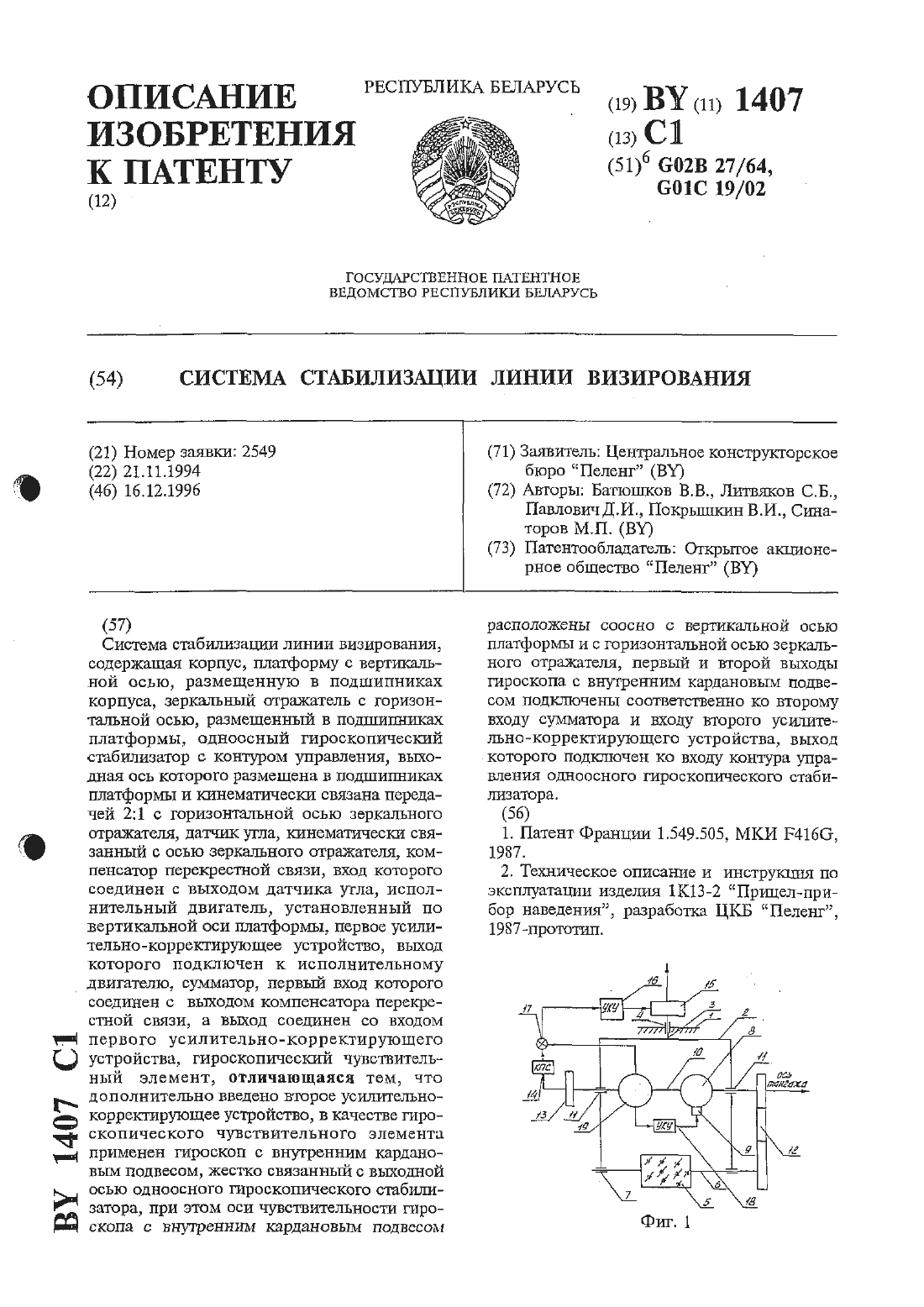
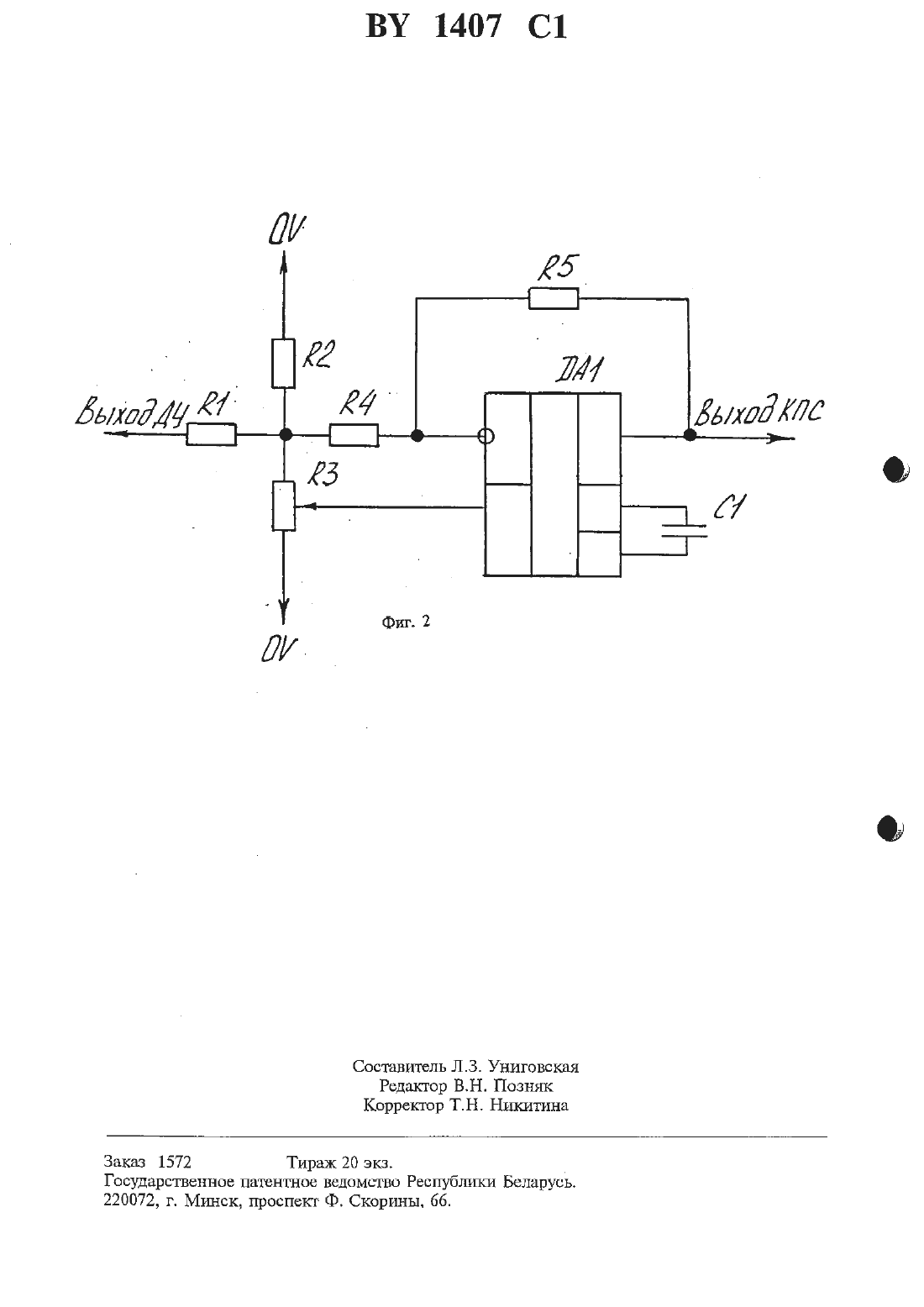
Изобретение относится к области оптического приборостроения, в частности, к гиростабилизируюцшм устройствам, размещаемьли на подвиэкиьтх объектах для обеспечения стабилизации поля зрения и управления линией визирования оптических приборов в вертикальной И горизонтальной плоскостях.Современные подвижные объекты для решения задач стабилизации поля зрения и управления линией визирования снабжаются различными стабилизирующими устройствами, обеспечивающими среднеквадратическую точность стабилизации линии визирования прицелов на уровне 0,05-О,1 мрад, что позволяет решать следующие задачи- обеспечить высокое качество наблюдения и точность прицеливания- выполнить операции измерения дальности- повысить разрешающую способность прицела И дальность обнаружения Цели.Как правило, стабилизирующие устройства Представляют собой различные варианты гироскопических устройств, соединенных с одним или несколькими зеркалами, входяШиьш в оптическую систему визирования.Известна система стабилизации ЗШНРШ визирования (ССЛВ) 1.ССЛВ обеспечивает стабилизацию линии визирования в вертикальной и горизонтальной плоскостях. уВ подтшшниках корпуса устанавливается гшатформа, обладающая свободой вращения вокруг вертикальной оси. В подшипниках платформы установлены зеркало и рамка с двумя одноосными гироскопичесюлш стабилизаторами, при этом горизонтальная ось вращения зеркала связана с горизонтальной осью вращения рашш ленточной передачей 12. На горизонтальной оси вращения рамки и вертикальной оси платформы установлены моментные двигатели. Одноосньте гиросколичестоите стабилизаторы установлены в рашсе таким образом, что их выходные оси параллельньт вертитсштьной оси платформы и горизонтальной оси зеркала. Для обеспечения стабилизации датчшси угла одноосных гироскопических стабилизаторов электрически связаны с моментньпш двигателями через усилители.Описанная в патенте ССЛВ обладает следующими недостатками- низкая точность стабилизации в горизонтальной плоскости при качке объекта по танГЗЖУ- налигше незатухаюцтих колебаний зеркала в горизонтальной плоскости в условиях вибрации объекта- низкая точность наведения линии визирования На цель в ревт/те управления оператоРОМ.Наиболее близким по технической сущноСТИ И достигаемому результату к настоящему изобретению является система стабилизации зеркала (ССЗ), разработанная ЦКБ Пеленг 21 ССЗ, в составе блока зеркала, блока управления и даттшка угла гироскопического,обеспечивает стабилизацию поля зрения и управление линией визирования по каналу вертикального наведения (ВН) и каналу горизонтального наведения (ГН),при этом среднеюзадратическая ошибка стабилизации при Движении объекта по трассе составляет 0,150,2 мрад.В подпшпниках корпуса блока зеркала установлена платформа с вертикальной осью, по оси платформы установлены датчик угла ГН и исполнительный двигатель. В подшиштиках платформы установлены одноосньпй гироскопический стабшшзатор (ОГС) с контуром управления И зеркало с горизонтальной осью,причем горизонтальная ось зеркала связана ленточной передачей 12 с выходной осью ОГС и осью датчика угла ВН, установленного на платформе.Стабилизация линии визирования в вертикальной плоскости осуществляется ОГС с контуром управления, обеспечивающим разворот зеркала.Стабилизация линии визирования в горизонтальной плоскости осуществляется электроприводом ГН, включающим исполнительный двигатель, усилительно-корректирующее устройство и сумматор, по сигналам гироскопического чувствительного элемента. В качестве гироскопического чувствительного элемента используется датчик угла гироскопический (ДУТ), при этом ДУТ и блок зеркала жестко устанавливаются на объекте таким образом, чтобы линия визирования была параллельна вектору ЮшетичесКого момента гиромотора.Для работы ДУГ в системе координат, связанной с зеркалом, обеспечивается слежение вектора кинетического момента гиромотора за линией визирования электроприводом слежения.Коьптенсатор перекрестной связи, вход которого соединен датчиком угла положения лштии визирования по каналу ВН, а выход электрически связан с электроприводом горизонтального наведения, устраняет погрецлчостъ стабилизашаи линии визирования в горизонтальной плоскости, возникающую при качке объекта по оси тангажа.ССЗ обладает рядом существенных недостатков- низкая точность стабилизации в горизонтальной плоскости, обусловленная неточностью совмещения системы координат,связанной с осями подвеса ДУГ относительно системы координат, связанной с осями подвеса зеркала (неточность выставки ДУГ относительно блока зеркала)- наличие погрешности стабилизации линии визирования в горизонтальной плоскости, возникающей при качке объекта по крону, обусловленной ошибками слежения вектора патетического момента гиромотора за линией визирования- низкая точность наведения линии визирования в режиме управления оператором, обусловленная наличием большой скорости собственного дрейфа стабилизированного направления линии визирования и малым диапазоном скоростей наведения, присущим одноосным гироскопическим стабилизаторам.Задачей настоящего изобретения является повышение точности стабилизации линии визирования за счет устранения погрешностей, обусловленных неточностью совмещения системы Координат, связаннои с гироскопическим чувствительным элементом, относительно системы координат, связанной с подвесом зеркала, повышение точности наведения линии визирования на цель за счет устранения дрейфа стабияшзированного направления и увеличения диапазона скоростей наведения Для повышения точности стабилизации И наведения линии визирования в ССЛВ, содержащую корпус, платформу с вертикальной осью, размещенную в подпшпниках корпуса,зеркальный отражатель с горизонтальной осью, размещенный в подшипниках платформы, одноосный гироскопический стабилизатор (ОГС) с контуром управления,выходная ось которого размещена в подшипниках платформы и кинематически связана передачей 21 с горизонтальной осью зеркального отражателя, датчик угла, ш/гнематичестсн связанный с осью зеркального отражателя,компенсатор перекрестной связи (КПС), вход которою соединен о выходом датчика угла,исполнительный двигатель, установленный по вергпшальной оси платформы, первое усилительно-корректирующее устройство (УКУ). выход которого подключен к исполнительному двигателю, сумматор, первый вход которого соединен с выходом компенсатора перекрестной связи, а выход соединен со входом первою усилительно-корректирующего устройства, гироскопический чувствительный элемент. в отличие огг прототипа, гироскопическнй чувствительный элемент вьшолнен в виде гироскопа с внутреннимкардановым подвесом (ГВК) и жестко связан с выходной осью одноосного гироскопического стабилизатора, при этом оси чувствительности гироскопа с внутренним кардановым подвесом расположены соосно с вертикальной осью платформы и с горизонтальной осью зеркального отражателя, и дополнительно введено второе усилительноКорректирующее устройство, выход которого подключен ко входу контура управления одноосного гироскопического стабилизатора,первый и второй выходы гироскопа с внутренним кардановым подвесом подкшочены соответственно ко второму входу суь/шатора и входу второго усилительно-корректирутощего устройства.Реализация системы стабилизации линии визирования в соответствии с изобретением позволила решить следующие задачи.1. Повысить точность стабитшзации линии визирования в горизонтальной плоскости- среднеквадратическая ошибка стабитшзаЦИИ уменьшена до уровня 0,1 мрад за счет применения ГВК, обладающего высокой точностью, до 0,05 мрад, сохранения стабилизированного положения в пространстве вектора мистического момента ротора ГВК- устранены оцшбтш стабилизации, вызванные неточностью выставки гироскопического чувствительного элемента относительно осей подвеса зеркального отражателя за счет размещения ГВК на единой платформе с зеркальным отражателем и жесткой связи с выходной осью ОГС.2. Повысить точность прицеливания и сопровождения цели за счет расширения диапазона скоростей наведения линии визирования и устранения дрейфа стабилизируемого направления , вызванного вредньпуш моментами ОГС.3. Построение ССЛВ по указанной схеме также позволяет- уменьшить габаритные размеры ССЛВНа фиг. 2 представлена принципиальная электрическая схема КПС.Система стабилизации линии визирования содержит корпус 1, закрепленный на подвижном объекте, платформу 2 с вертикальной осью 3, размещенную в подшшшиках 4 корпуса 1, зеркальный отражатель 5 с горизонтальной осью 6, размещенный в подшипниках 7 платформы 2, ОГС 8 с контуром управления 9. выходная ось 10 которого размещена в подшипниках 11 платформы 2 и югнематттесшг связана передачей 12 в соотношении 21 с горизонтальной осью 6 зер 7 ВУ 1407 С 1 акального отражателя 5, датчик угла 13, кинематически связанный с горизонтальной осью 6 зеркального отражателя 5, КПС 14, вход которого соединен с выходом датчика угла 13,исполнительный двигатель 15, установленный по вертитсальной оси 3 платформы 2,первое УКУ 16 , выход которого подключен к исполнительному двигателю 15, сумматор 17,первьш вход которою соединен с выходом КПС 14, а выход соединен с входом первого УКУ 16, второе УКУ 18, выход которого подключен ко входу контура управления 9 ОГС 8, ГВК 19 жестко связанный с выходной осью 10 ОГС 8 и установленный так, что оси ЧУВСТВИТВЛЬНОСТИ раСПОЛОЖВНЫ СООСНО С Вбртикальной осью 3 платформы 2 и с горизонтальной осью 6 зеркального отражателя 5,а первый и второй выходы ГВК 19 соответственно подключены ко второму входу сумматора 17 и входу второго УКУ 18.Основными элементами ГВК 19 являются ротор, задающий стабилизируемое направление, электродвигатель, упругий подвес, датчики угла, датчики момента. Конструктивные схемы реализации ГВК 19 и принцип работы описаньт например, в ю-тиге Д.С.Пельпор и др. Динамически настраиваемые гироскопы, Мацшностроение, 1988 г, конкретная ССПВ выполнена с использованием малогабаритного гироскопа МГ-4.В Качестве датчгжа угла 13 применен вращающийся трансформатор 2,5 ВТ, 0,05/0,1 ЛШ 3.010.394 ЛШО.3 О 1.О 14 ГУ.Электропривод горизонтального наведения,вктпочаюший датчик угла ГВК 19, выдающий сигнал рассогласования в горизонтальной плоскости, сумматор 17, первое УКУ 16,исполнительньтй двигатель 15, может быть вьшолнсн в соответствии с авторским свидетельством Не 1640668.В качестве исполнительного двигателя 15 использован датчик Момента ДЭМ 12,6 Д 2.326.012 ТУ.Конструктивная схема реализации и принцип работы ОГС 8 с контуром управления 9 И контуром межрамотптой коррекции описаны, напрштер, в книге Д.С.Пельпор Гироскопичестше системы, часть 1, Высшая школа, 1971 г.Контур управления 9, предназначенный для управления поворотом выходной оси ОГ С 8,содержит усилитель мощности, датчик момента и гироскоп .КПС 14, предназначенный для формирования сигнала, пропорционального погрешности стабилизации линии визирования. обусловленной погрешностью совмещения осей чувствительности ГВК 19 и горизонтальной оси 6 зеркального отражателя 5, возникающей при качке объекта по оси тантажа.может быть реализован в соответствии с фиг.2.Сигнал, соответствующий погрешности,формируется электронным устройством, реализованным на операционном усилителе ДА 1(УД 14), включенньш по модифицированной схеме Дифференциального усилителя, позволяющего регулировкой резистора 113 получить вьтходной сигнал в пределах от минус Пвх до Пвх. При качке объекта по тангажу с датчика угла 13 снимается сигнал, пропорционапьньтй углу поворота объекта относительно зеркального отражателя 5, и подается на вход КПС 14, одновременно в КПС 14 резистором КЗ задается сигнал, пропорциональный погрешности совмещения осей чувствительности ГВК 19 и горизонташэной оси 6 зеркального отражателя 5. КПС 14 обеспечивает перемножение двух сигналов. С вь 1 хода КПС 14 сигнал, пропорциональный погрешности, подается на вход сумматора 17,и далее через первое УКУ 16 поступает на исполнительный двигатель 15, которьш поворачивает платформу 2 в горизонтальной плоскости с учетом погрешности.Второе УКУ 18 формирует корректирующий сигнал в контур управления 9 ОГС 8 и обеспечивает устранение статической ошибтш углового рассогласования между выходной осью 10 ОГС 8 и ротором ГВК 19, исключая дрейф лштии визирования.Второе УКУ 18 реализует закон управления,который описывается передаточной функцией видагде К - коэффициент усиления, Т 1- постоянная времени дифференцирующего звена,Т - постоянная времени апериодического звена, Р - оператор дифференцирования.Стабилизация линии визирования в вертикальной плоскости осуществляется ОГ С 8,управляющим поворотом зеркального отражателя 5 вокруг горизонтальной оси 6.При движении объекта по выходной оси 10 ОГС 8 действуют внешние возмущающие моменты (момент трения в подпштттпнсах,момент тяжения токоподводов моменты дебаланса, инерционные моменты).Под влиянием внепших возмущающих моментов, в соответствии с законом прецессии,гироскоп поворачивается вокруг оси внутренней рамтси с угловой скоростью ЬМвс/Н где Ь - угловая скорость поворота, Мвс моменты внешних сил, действующих по выходной оси 10 ОГС 8, Н - кинетический момент гироскопа.При движении гироскопа с угловой скоростью Ь. по выходной оси 10 ОГС 8 действуетИнерционный гироскопический момент равный МгирНЬ и направленный в сторону,противоположную внепшему возмущаюшему моменту, одновременно при повороте гироскопа на угол Ь с ДУП снимается сигнал,пропорциональный углу поворота, и через УКУ поступает на двигатель разгрузки, который развивает момент, пропоршюнатгьньпй углу поворота Ь и также направленный в сторону, противоположную внешнему возмущающему моменту. В динамике инерционный гироскопический момент и момент,развиваемый двигателем разгрузки, уравновешивают момент внепгнщ сил и движение гироскопа вокруг оси внутренней рамки прекращается.Таким образом, сумма всех моментов, действующих по выходной оси 10 ОГС 8, равна нулю, при этом выходная ось 10 ОГС 8 и линия визироваъптя сохраняют свое положение в пространстве, а зеркальный отражатель 5 поворачивается на угол, равньпй половине угла поворота объекта в вертикальной плоскости.Стабилизация линии визирования в горизонтальной плоскости осуществляется электроприводом горизонтального наведения,включающим последовательно соединенные первьпй выход ГВК 19 (выходные обмотки датчика угла горизонтального наведения) сумматор 17, первое УКУ 16, исполнительный двигатель 15.При двиэкенша объекта по трассе по вертикальной оси 3 платформы 2 действуют различные внешние возмущающие моменты(момент трения в подшипниках, момент тяжения токоподводов, моменты дебаланса,инершиюнные моменты), вызывающие отклонение платформы И линии визирования от стабилизируемого направления, задаваемого ротором ГВК 19, при этом с первого выхода ГВК 19 снимается сигнал, пропорциональный углу отклонения линии визирования относительно стабилизируемого направления в горизонтальной плоскости. Сигнал Г ВК 19 через сумматор 17 подается в первое УКУ 16, формирующее закон управления исполнительным двигателем 15. С выхода первого УКУ 16 управляющее напряжение подается на обмотку исполнительного двигателя 15, который разворачивает платформу 2 с зеркальным отражателем 5 вокруг вертикальной оси 3, чтобы устранить рассогласование между линией визирования и ротором ГВК 19 (обнулить сигналы датчика угла ГВК 19) И, ТЕПСИМ образом, со 10хранить в пространстве положение линшт визирования.При повороте объекта по оси тангажа с выхода датьпша угла 13 снимается сигнал,пропорциональный углу поворота объекта относительно стабилизируемого направления в вертикальной плоскости и подается на вход КПС 14. КПС 14 формирует сигнал, пропорциональный погрешности, обусловленной неточностью выставки осей чувствительности ГВК 19 относительно горизонтальной оси 6 зеркального отражателя 5. Сщнал с выхода КПС 14 подается на первьй вход сумматора 17 электропривода горизонтального наведения, обеспечивающего поворот лш-тии визирования в горизонтальной плоскости с учетом погрешности.Контур слежения, включающий последовательно соединенные второй выход ГВК 19(выходные обмотки датчика угла вертикального наведения ГВК 19), второе УКУ 18 и датчик момента контура управления 9 ОГС 8,ОбВС/ПСЧИБЗТ СЛЕЖС/НИВ ДТП/ПНИ ВИЗИРОВННИЯ 351 ротором ГВК 19 , задающим стабилизируемое направление.При наличтти большой скорости дрейфа выходная ось 10 ОГС 8 разворачивается относительно стабилизируемого направления, при этом со второго выхода ГВК 19 снимается сшнал, пропорциональный углу оттшонентш линии визирования относительно задаваемого ротором ГВК 19 стабидшзируеьтого направления в вертикальной плоскости. Сигнал ГВК 19 подается во второе УКУ 18, формируЮЩСБ ЗЗКОН УПРЗВЛВНИЯ ПОВОРОГОМ ГИРОСКОПЗ. ОГС 8. С выхода второго УКУ 18 управлялощее напряжение подается в контур управления 9 ОГС 8, развивающего управляющий момент, под действием которого гироскоп прецессирует и через ленточную передачу 12 разворачивает зеркальный отражатель 5,чтобы устранить рассогласование тяежду линией визирования и ротором ГВК 19 (обнулить сигнал датчика угла ГВК 19) и, таким образом, сохранить в пространстве положение лштии визирования.Наведение шнии визирования на цепь осуществляется по сигналам управления, поступающим на обмотки датчика момента ГВК 19. Под действием управляющих моментов ротор ГВК прсцессирует со скоростью, пропорциональной величине управляющего напряжения. что приводит к изменению стабплизируемого направления в вертикальной и горизонтальной плоскостях.
МПК / Метки
МПК: G01C 19/02, G02B 27/64
Метки: линии, визирования, система, стабилизации
Код ссылки
<a href="https://by.patents.su/6-1407-sistema-stabilizacii-linii-vizirovaniya.html" rel="bookmark" title="База патентов Беларуси">Система стабилизации линии визирования</a>
Система стабилизации линии визирования
Номер патента: 711
Опубликовано: 30.06.1995
Авторы: Покрышкин В. И., Павлович Д. И., Синаторов М. П., Литвяков С. Б., Батюшков В. В.
МПК: F41G 3/02, G02B 27/64
Метки: стабилизации, визирования, линии, система
Текст:
...системы координат, связанной с линией визирования- наличие незатухающих колебаний зеркала в условиях вибрации объекта, обусловленных применением в качестве чувствительных элементов одноосных силовых гироскопическихстабилизаторов, имеющих низкую резонансную частоту нутационных колебаний, находящуюся в диапазоне вибраций, возникающих при движении объекта- НИЗКЗЯ ТОЧНОСТЬ СЛЕЖЕНИЯ ЛИНИИ ВИЗИРОвания в режиме управления оператором,...
Система стабилизации многоканального прицельного комплекса
Номер патента: 1102
Опубликовано: 14.03.1996
Авторы: Батюшков Валентин Вениаминович, Павлович Дмитрий Иосифович, Покрышкин Владимир Иванович, Мартинович Геннадий Михайлович, Литвяков Сергей Борисович
МПК: F41G 3/02, G02B 27/64
Метки: многоканального, прицельного, стабилизации, комплекса, система
Текст:
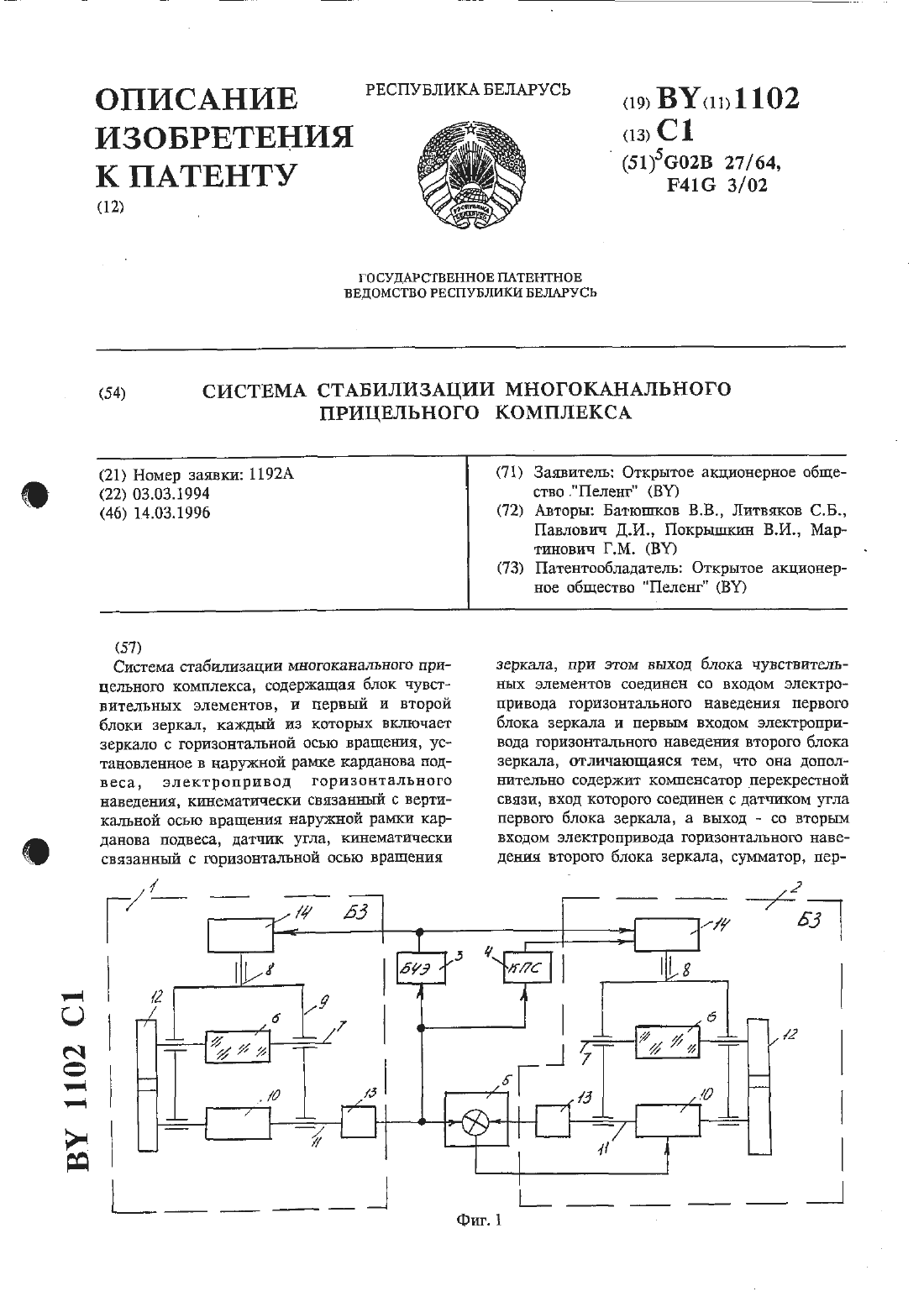
...каналов обеспечиваетсн двумн зеркалами,размешенными на единой платформеустанов ленной в кардановсм подвесе. В качестве чувствительного алемента сись темы стабилизации полн зрении используется двункоординатный ГИРООНОПИ ческий датчикустановленный на платформепри атом оси чувствительности датчика совпадет с осями подвеса платформы.Основным недостатком рассмотренного технического решении нвлнютон большие габариты поворотной платформыпоскольку на...
Охлаждающий участок линии проволочного стана
Номер патента: 952
Опубликовано: 15.12.1995
Авторы: Дышлевич Виктор Федорович, Бондаренко Александр Николаевич, Жучков Сергей Михайлович, Бобренок Геннадий Людвигович, Стеблов Анвер Борисович, Сокиркин Сергей Николаевич, Асанов Валерий Николаевич, Токмаков Вадим Анатольевич
МПК: B21B 45/02
Метки: проволочного, стана, участок, линии, охлаждающий
Текст:
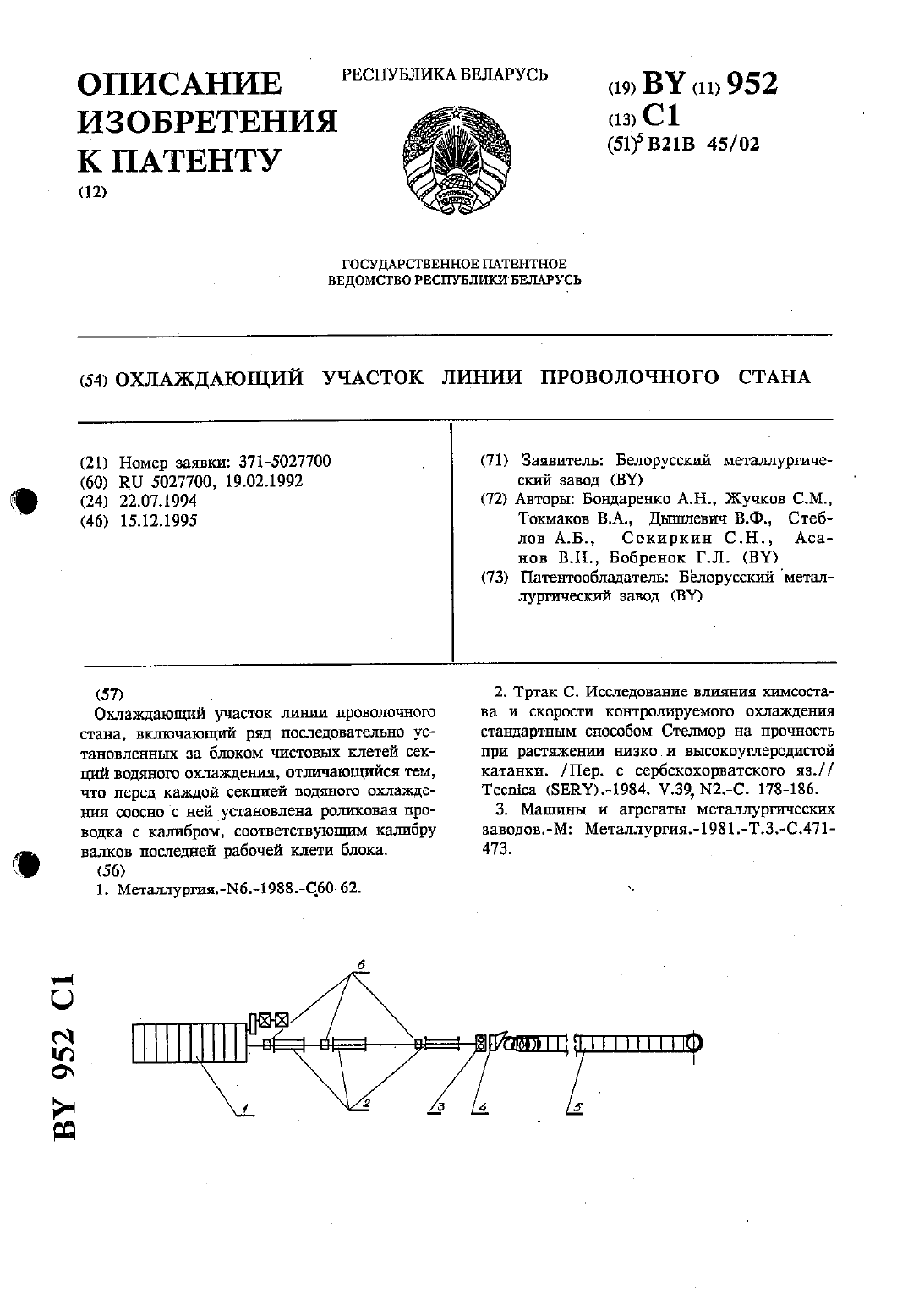
...задача РСШЗВТСЯ тем, ЧТО В устройстве для охладения катания в потоке стана, состоящем из ряда последовательно установленных за блоком чистовых клетей секций водяного охлаждения, перед каждой секцией соосно с ней установлена роликовая проводка с калибром, соответствующем кадшбру валков последней рабочей клети блока.Изобретение поясняется чертежом, на котором изображена схема линии водяного охлажДСНИЯ ПРОВОЛОЧНОГО стана, ИСПОЛЬЗУЮЩВГО...
Отражательный передатчик и система связи
Номер патента: 1157
Опубликовано: 14.06.1996
Авторы: Хартмут Бургхардт, Штефан Киндт, Юрген Янс
МПК: H04B 9/00
Метки: система, отражательный, передатчик, связи
Текст:
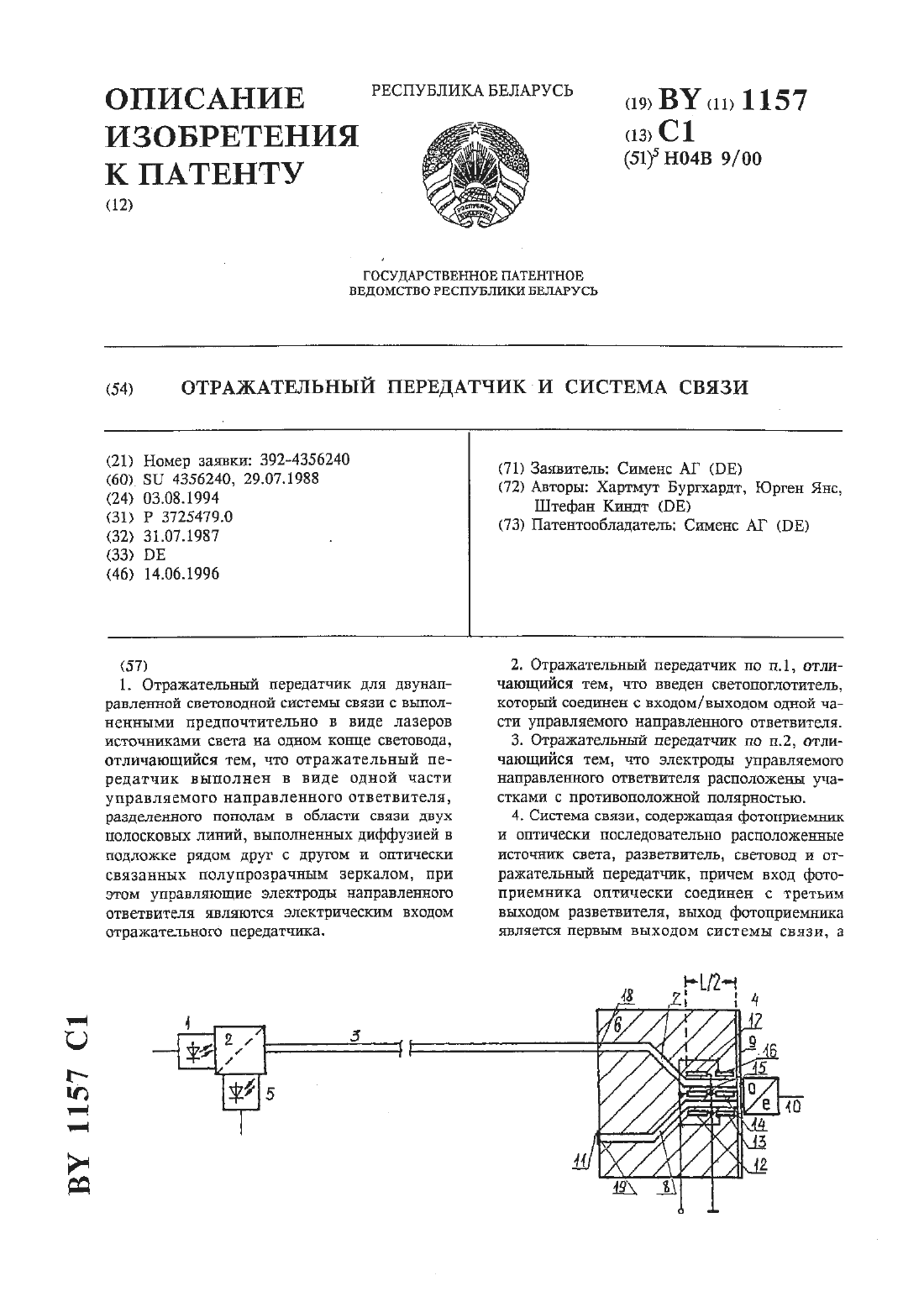
...например, с помощью рйп-диода.Рядом и между полосковыми линиями 7 и 8 находятся электроды 12-17 одной части управляемого оптического направленного ответвителя 6, которые нагружеяы передаваемым по световоду 3 сигналом передатчика, например сигналом 140 мбит/ сек. Электроды при этом участками могут иметь встречную полярность,как это, в принципе, известно у так называемых АБ -реверсивных направленных ответвителей. Это создает лучшие условия...
Спутниковая система связи
Номер патента: 287
Опубликовано: 30.12.1994
Автор: Петер Дондль
МПК: H04B 7/185
Метки: система, связи, спутниковая
Текст:
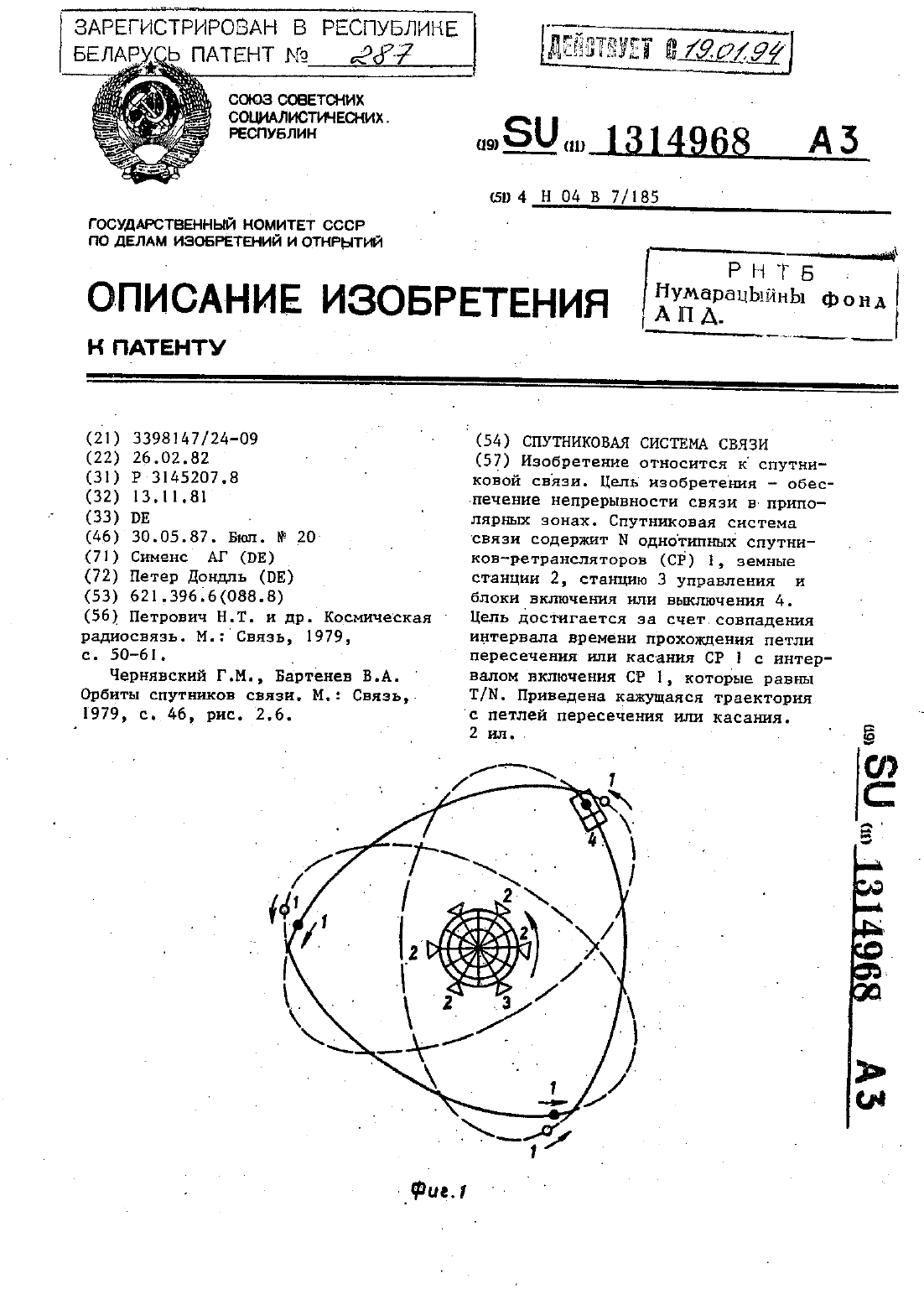
...касания установить на 10 восточной долготылии), то два других номинальных положения получаются сами собой.В северном полушарии одно 130 восточной долготы (над Манчжурией в Китае) и второе - 1100 западной долготы (над штатом Уайоминг, США). В этом примере исполнения неблагоприятная немецкая радиостанция связи будет во Фленсбурге где антенну придется двигать из направленя на Зенит до минимального угла меставремени, при сопровождении...
Предыдущий патент: Установка для опаливания ошпаренных тушек птицы
Следующий патент: Противоблокировочная тормозная система транспортного средства
Случайный патент: Нож для кормоуборочных машин