Система стабилизации линии визирования
Номер патента: 711
Опубликовано: 30.06.1995
Авторы: Литвяков С. Б., Синаторов М. П., Павлович Д. И., Покрышкин В. И., Батюшков В. В.
Текст
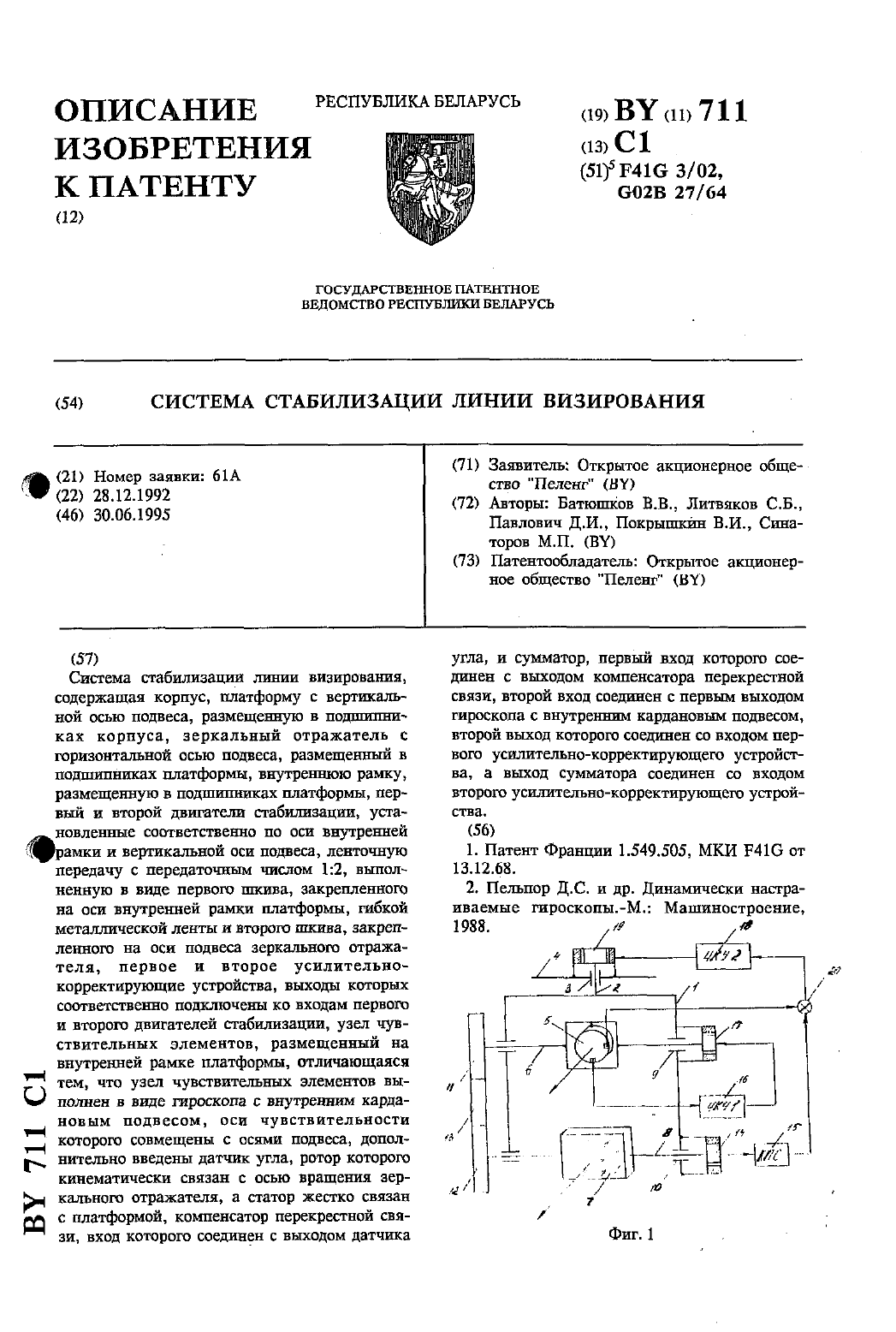
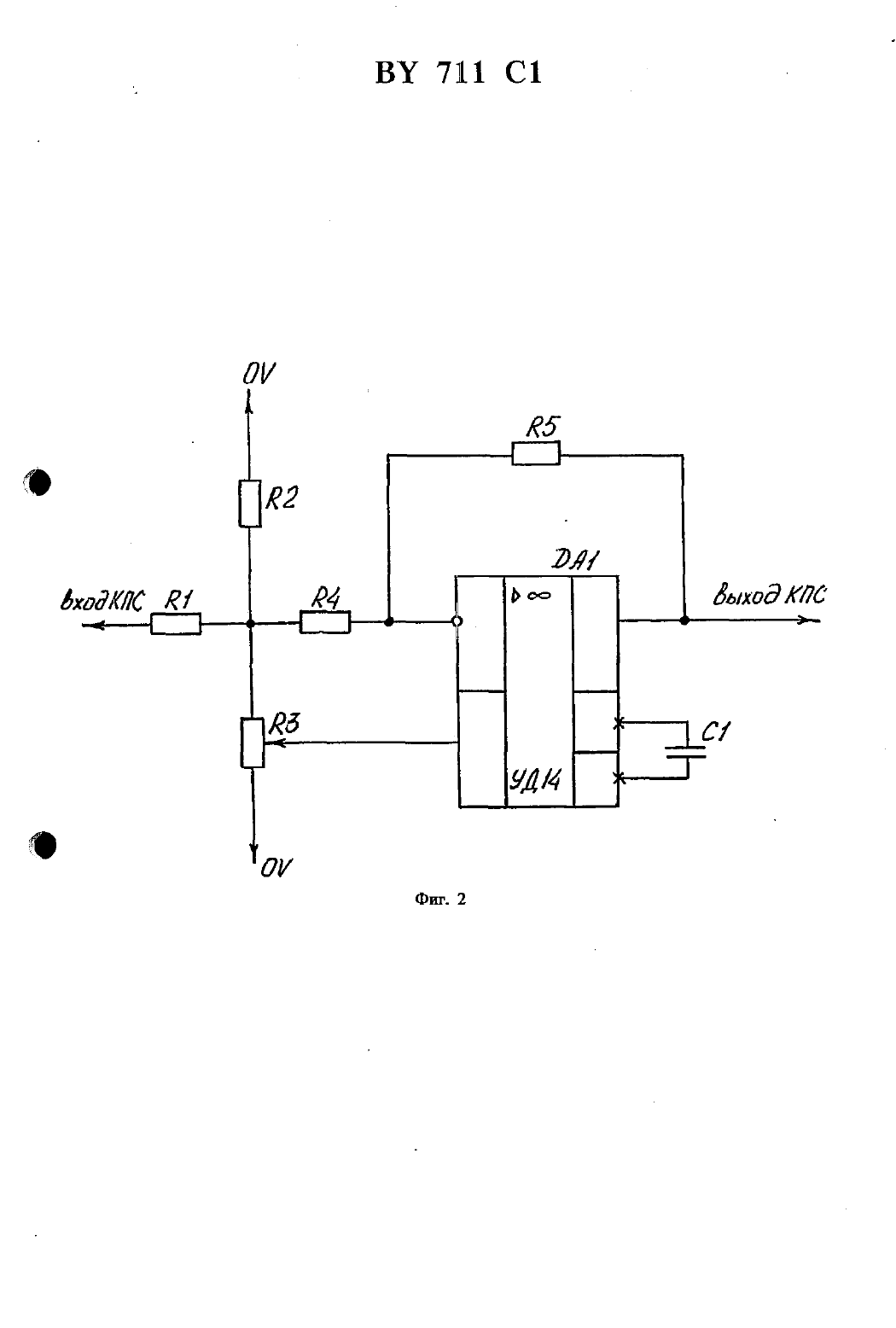
Изобретение относится к области оптического приборостроения, в частности к гиростабилизирующим устройствам, размещаемым на подвижных объектах для обеспечения стабилизации поля зрения и управления линией визирования оптических приборов в вертикальной и горизонтальной плоскостях.Современные подвижные объекты для решения задач стабилизации поля зрения и управления линией визирования снабжаются различьтьтми стабилизирующим устройствами,обеспечивающими точность стабилизации линии визирования пртщелов на уровне О,05-0,1 мрад. что позволяет решать следующие задачи- обеспечить высокую точность прицеливания,- выпошшть операции измерения дальности,- повысить разрешающую способность прицела и дальность обнаружения цели.Как правило, стабилизирующие устройства представляют собой различные варианты гироскопических устройств, соединенных с одним или несколькими зеркалами, входящими в оптическую систему визирования.Известна система стабилизации зеркала(ССЗ), разработанная ЦКБ Пеленг, принцип работы которой изложен в техническом описанин 1572.00.00.000 Т 0.ССЗ, в составе блока зеркала, блока управления и датчика угла гироскопического, обесПСЧИВВСТ СТЗБИЛИЗЗЦИЮ ПОЛЯ ЗРЕНИЯ И управление линией визирования по каналу вертикального наведения (канал ВН) и каналу горизонтального наведения (канал ГН) при этом среднеквадратическая ошибка стабилизации при движении объекта по трассе составляет 0,15-02 мрад.Стабилизация линии визирования в вертикальной плоскости осуществляется зеркалом,установленным в кардановом подвесе, и одноосным гироскопическим стабилизатором(ОГС), выходная ось которого связана с юризонтальной осью вращения зеркала ленточной передачей 12.ОГС представляет собой электромеханическую систему, состоящую из гиромотора, установленного в кардановом подвесе, датчика угла прецессии (ДУП) и магнита наведения,установленных на оси внутренней рамки подвеса, двигателя разгрузки (ДР), установленного на оси наружной рамки подвеса.Выходная ось ОГС связана с осью вращения зеркала ленточной передачей 12, поскольку для обеспечения стабилизации линии визирования по каналу ВН зеркало должно поворачиваться на угол, равный половине угла качки основания.Ось вращения гиромотора ОГС удерживается на направлении, перпендикулярном к плоскости наружной рамы карданова подвеса с помощью контура разгрузки, включающегоНа осн вращения наружной рамки карданова подвеса зеркала установлен датчик угла положения линии визирования по каналу ГН и исполнительный двигатель канала ГН, на наружной рамке карданова подвеса зеркала установлен датчик угла положения линии визирования по каналу ВН, при этом ось враЩСНИЯ датчика угла связана ЛСНТОЧНОЙ передачей 122 с осью вращения зеркала.Стабшшзация линии визирования в горизонтальной плоскости осуществляется электроприводом канала ГН по сигналам датчика угла гироскопического (ДУГ), при этом ДУГ и блок зеркала жестко устанавливаются на подвижном основании таким образом, чтобы линия визирования была параллельна вектору кинетического момента гиромотора ДУГ.ДУГ является электромеханической систе мой, измеряющей угол поворота основания относительно стабилизируемого направления и состоит из гиромотора, установленного в кардановом подвесе, датчика угла положения гиромотора по каналу ВН и магнита горизонтального наведения, установленных на оси внутренней рамы подвеса, двигателя стабилизации и датчика положения гиромотора по каналу ГН, установленных на оси вращения наружной рамы подвеса.Для работы ДУГ в системе координат, связанной с зеркалом, в системе стабилизации обеспечивается слежение вектора Н кинетического момента гиромотора ДУГ за линией визирования электроприводом.Электропривод состоит из сумматора, усилительно-корректирующего устройства, исполнительного двигателя, установленного на вертикальной оси подвеса ДУГ, датчика угла, УСТЕНОВЛСННОГП на ТОПИЗОНТЗЛЬНПЙ ОСИ ПОЛЕЗЕМДУГ. На вход сумматора электропривода п ступает сигнал с датчика угла положения лиНИИ визирования В вертикальной ПЛОСКОСТИ.ССЗ обладает рядом существенных недостатКОЕ- низкая точность стабилизации в горизонтальной плоскости, обусловленная неточноСТЬЮ СОВМСЩЕНИЯ СИСТЕМЫ координат,связанной с осями подвеса ДУГ относительно СИСТЕМЫ КООРДИННТ, СВЯЗЗННОЙ С ОСЯМИ ПОДВВСЗ зеркала (неточность выставки ДУГ относительно блока зеркала)- наличие погрешности стабилизации линии визирования в горизонтальной плоскости, возникающей при качке объекта по крену, обусловленной ошибками в контуре слежения вектора кинетического момента ДУГ за литшей визирования- наличие незатухающих колебаний зеркала в условиях вибрации объекта, обуштовленныхприменением В КЗЧССТВО ЧУВСТВИТСЛЬННХ эле ментов одноосных силовых гироскопических стабилизаторов, имеющих низкую резонансную частоту нутационных колебаний 70-80 ГЦ,находящуюся в диапазоне вибраций, возникающих при движении объекта- низкая точность слежения линии визирования в режиме управления оператором, обусловленная наличием большой скорости собственного дрейфа заданного направления до 16 мрад/ мин и невысокой скоростью наведения, присущей одноосным силовым гироскогшческим стабилизаторам.Наиболее близким по технической сущности и достигаемому результату к настоящему изобретению является система стабилизации линии визирования (ССЛВ) 1.ССЛБ обеспечивает стабилизацию линии визирования в вертикальной и горизонтальной ПЛОСКОСТЯХ.Зеркало и узел чувствительных элементов размещаются на платформе, установленной в подшипниках корпуса и обладающей свободой вращения вокруг вертикальной оси. В подшипниках платформы установлены зеркало и УЗЕЛ ЧУВСТВИТЛЬНЫХ ЭЛЕМЕНТОВ, ПРИ ЭТОМ горизонтальная ось вращения зеркала связана С ТОРИЗОНТЗЛЬНОЙ ОСЬЮ вращения УЗЛЗ. ЧУВСТвительных элементов ленточной передачей 21. На горизонтальной оси вращения узла ЧУБСТВИТСЛЬНЫХ ЭЛЕМЕНТОВ И ВСРТИКЗЛЬНОЙ ОСИ платформы установлены исполнительные двигатели. Узел чувствительных элементов ВЫПОЛНЕН В ВИДЕ ДВУХ ОДНООСНЫХ ГИРОСКОПИ ческих стабилизаторов, установленных на оси таким образом, ЧТО ИХ ОСИ ЧУВСТВИТЕЛЬНОСТИ параллельны ББРТИКЕЛЬНОЙ ОСИ платформы И горизонтальной оси зеркала. Для обеспечеиия стабилизации узел чувствительных ЭЛЕМЕНТОВ ЭЛСКТРИЧССКИ СВЯЗЗН С ИСПОЛ нительными двигателями усилительно-корректирующими устройствами.Описанная в патенте ССЛВ обладает следующими недостатками- низкая точность стабилизации, обусловлен НаЯ применением В КЗЧССТВВ узла ЧУВСГВИТЕЛЬНЫХ ЭЛЕМЕНТОВ ДВУХ ОДПООСПЫХгироскопических стабилизаторов, обладающих большой собственной погрешностью сохранения в пространстве заданного направления- низкая точность стабилизации в горизонтальной плоскости при качке объекта по тангажу, обусловленная неточностью совмещения системы координат, связанной с узлом чувствительных элементов относительно системы координат, связанной с линией визирования- наличие незатухающих колебаний зеркала в условиях вибрации объекта, обусловленных применением в качестве чувствительных элементов одноосных силовых гироскопическихстабилизаторов, имеющих низкую резонансную частоту нутационных колебаний, находящуюся в диапазоне вибраций, возникающих при движении объекта- НИЗКЗЯ ТОЧНОСТЬ СЛЕЖЕНИЯ ЛИНИИ ВИЗИРОвания в режиме управления оператором, обусловленная наличием большой скорости собственного дрейфа стабилизируемого направления и малым диапазоном скоростей наведения, присущим одноосным силовым ГИВОСКОПИЧВСКИМ стабилизаторам.Целью настоящего изобретения является поВЫШВНИС ТОЧНОСТИ СТЗОИЛИЗВЦИИ ЛИНИИ ВИЗИрования за счет устранения погрешностей,обусловленных неточностью совмещения системы координат, связанной с узлом чувствиТЕЛЬНЫХ ЭЛВМВНТОВ, ОТНОСИТЕЛЬНО СИСТЕМЫ координат, связанной с подвесом зеркала и за счет повышения точности сохранения в пространстве НЗПРЗВЛВИИЯ, ЗЗДНВЗЕМОГО УЗЛОМ ЧУВСТВИТСЛЬНЫХ ЭЛЕМЕНТОВ.Для повышения точности стабилизации линии визирования в ССЛВ, содержащую корпус, платформу с вертикальной осью подвеса,размещенную в подшипниках корпуса, зеркальный отражатель с горизонтальной осью подвеса, размещенный в подшипниках платформы, внутреннюю рамку, размещенную в подшипниках платформы, первый и второй двигатели стабилизации, установленные соответственно по оси внутренней рамки и вертикальной оси подвеса, ленточную передачу с передаточным числом 12, выполненную в виде ПВрВОГО шкива, ЗЗКРВПЛСННОГО на ОСИ ВНУТРЕНней рамки платформы, гибкой металлической ЛЕНТЫ И второго ШКИВВ, ЗЗКРСПЛВННОТО на ОСИ подвеса зеркального отражателя, первое И ВТОрое усилительно-корректирующее устройства,выходы которых соответственно подключены ко входам первого и второго двигателей стабилизации, узел чувствительных элементов,размещенный на внутренней рамке платформы, в отличие от прототипа, узел чувствительных элементов выполнен в виде гироскопа с внутренним КЕРДЗНОБЫМ ПОДВССОМ, ОСИ ЧУВСТВИТЕЛЬНОСТИ КОТОРОГО СОВМСЩСНЫ С ОСЯМИ ПОДвееа, дополнительно введены датчик угла,ротор которого кинематически связан с осью вращения зеркального отражателя, а статор жестко связан с платформой, компенсатор перекрестной связи, вход которою соединен с выходом датчика угла и сумматор, первый вход которого соединен с выходом компенсатора перекрестной связи, второй вход соединен с первым выходом гироскопа с внутренним кардановым подвесом, второй выход которого соединен СО ВХОДОМ первою усилительномхорректирующево устройства, а выход сумматора соединен со входом второго усилительно-корректирующею устройства.При движении объекта основание, на котором установлена ССЛВ, подвержено качке по оси тангажа, оси курса, оси крена. Наличие непараллельности оси вращения Г ВК и оси вращения зеркала приводит к возникновению погрешности стабилизации линии визирования в горизонтальной плоскости при качке основания по оси тангажа. Значение ошибки стабилизации с высокой степенью точности может быть определено по формуле 1 БШЬ - Зйпц,для малых углов формула может быть представлена в виде 1 Ьс 1, где 1 погрешность стабилизации линии визирования, Ь - непараллельносгь в вертикальной плоскости, с угол качки основания по оси тангажа.Введение датчика угла, компенсатора перекрестной связи и сумматора позволяет компенсировать указанную погрешность подачей в электропривод горизонтального наведения сигнала, пропорционального погрешности. Соответствующий сигнал формируется электронным устройством - компенсатором перекрестной связи. При качке основания по тангажу с датчика угла снимается сигнал, пропорциональный углу тангажа, и подается на вход КПС, одновременно в КПС выставляется сигнал, пропорциональный непараллельности горизонтальных осей вращения зеркала и ГВК. КПС обеспечивает перемножение двух сигналов. При подаче на вход сумматора сигнала,пропорционального погрешности, электропривод горизонтального наведения поворачивает линию визирования на угол, равный погрешности стабилизации линии визирования.Предложенная схема ССЛВ с использованием в качестве узла чувствительных элементов ГВК позволяет значительно повысить точность сохранения в пространстве заданного направления, поскольку ГВК работает в оптимальном режиме (отклонение вектора кинетического момента ГВК относительно корпуса является минимальным), что уменьшает действие вредных моментов, влияющих на скорость систематического дрейфа.Реализация системы стабилизации линии визирования в соответствии с изобретением позволила решить следующие задачи.1 Повысить точность прицеливания и сопровождения цели- среднеквадратическая ошибка стабилизации уменьшена до уровня 0,1 мрад по каналам ВН и ГН, за счет применения ГВК, обладающего высокой точностью, до 0,05 мрад, сохранения стабилизированного положения в пространстве вектора кинетического момента- устранены ошибки стабилизации по каналу ГН, вызванные неточностью выставки узла чувствительного элемента относительно зеркала за счет введения компенсатора перекрестной связи.2. Увеличить дальность распознавания цели- разрешающая способность оптического прибора, установленного на движущемся объекте значительно улучшена, поскольку частота нутационных колебаний ГВК значительно выше, чем в классических одноосных гироскопических стабилизаторах, используемых в аналоге и прототипе.3. Значительно расширены тактические возможности объекта- увеличен диапазон скоростей управления линией визирования.Построение ССЛВ по указанной схеме также позволяет- уменьшить габаритные размеры ССЛВ по сравнению с аналогом и прототипомНа фнг.2 представлена принципиальная электрическая схема КПС.ССЛВ (см.фиг.1) содержит платформу 1,имеющую вертикальную ось вращения 2, установленную в подшипниках 3 корпуса 4, ГВК 5, установленный на внутренней рамке с горизонтальной осью вращения 6 и зеркало 7 с горизонтальной осью вращения 8, при этом ось вращения 6 внутренней рамки и ось вращения 8 зеркала 7 соответственно установлены в подшипниках 9, 10 платформы 1 и кинематически связаны ленточной передачей с передаточным числом 12 посредством шкивов 11,12 и гибкой металлической лентой 13, датчик угла 14, статор которого жестко связан с платформой 1, а ротор кинематически связан с осью вращения 8 зеркала 7, компенсатор перекрестной связи 15, вход которого соединен с выходом датчика угла 14, первое УКУ 16,выход которого соединен с первым двигателем стабилизации 17, размещенным на платформе 1, причем выходная ось двигателя связана с горизонтальной осью вращения 6 внутренней рамки, первый выход ГВК 5 соединен со входом первого УКУ 16, второе УКУ 18, выход которого соединен со вторым двигателем стабилизации 19, размещенным на корпусе 4,причем выходная ось двигателя связана с вертикальной осью вращения 2 платформы 1, сумматор 20, первый вход которого соединен с выходом КПС 15, второй вход соединен со вторым выходом ГВК 5, а выход сумматора 20 соединен со входом второго УКУ 18.Основными элементами ГВК являются ротор,электродвигатель, упругий подвес, датчик угла, датчик момента. Конструктивные схемы реадшзации ГВК 5 и принцип работы описаны 2, конкретная ССЛВ выполнена с использованием ГВК-10.
МПК / Метки
МПК: G02B 27/64, F41G 3/02
Метки: стабилизации, система, линии, визирования
Код ссылки
<a href="https://by.patents.su/6-711-sistema-stabilizacii-linii-vizirovaniya.html" rel="bookmark" title="База патентов Беларуси">Система стабилизации линии визирования</a>
Система регулирования натяжения раската в черновой группе клетей непрерывного прокатного стана
Номер патента: 136
Опубликовано: 30.09.1994
Авторы: Мачулин В. М., Зиберт В. П., Силантьев М. А., Рассадин В. М., Дышлевич В. Ф.
МПК: B21B 37/06, B21B 37/00
Метки: стана, раската, регулирования, клетей, непрерывного, система, прокатного, натяжения, группе, черновой
Текст:
...18. воздействуя на заданное значение скорости регулятор 3 скорости привода предыдущей клети. Уантегратор 18 стремится сигнал с сумматора 13 сделать раеньтм нулю. что соответствует заданнотнчу мехккпетевогхчу натвжению. Сигнал с сумматора 14 поступает также в устройство, регулирующее натяжение в предыдущем тиежклетевом промежутке (сигнал ХЗ. По мере продвижения головы заготовки вступает а работу устройство оегулирующее натяжение в...
Цифровая система управления
Номер патента: 162
Опубликовано: 30.09.1994
Авторы: Овод-Марчук Г. В., Филиппович В. Н., Найденов Г. А.
МПК: G05B 19/18
Метки: цифровая, управления, система
Текст:
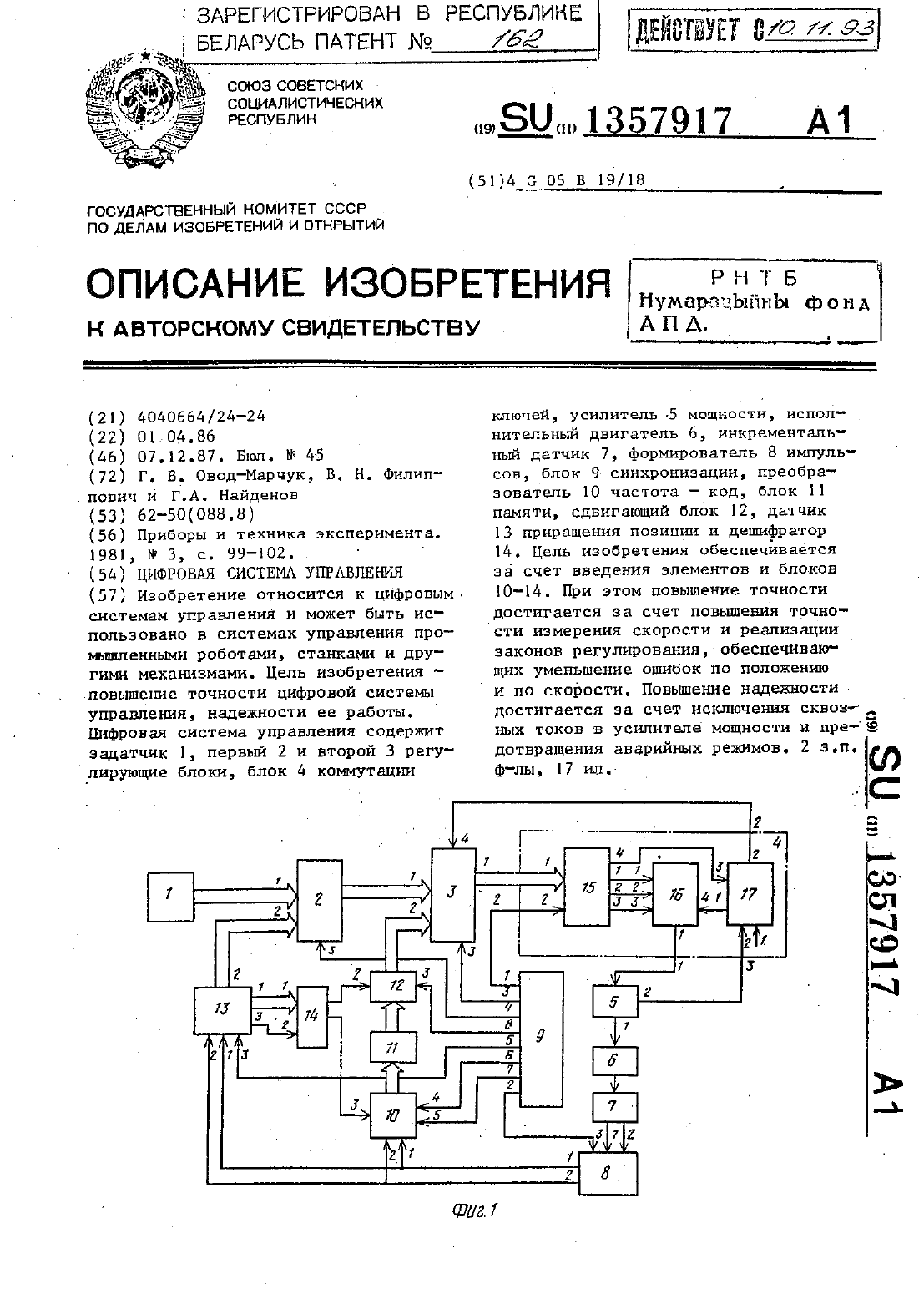
...выходов (например, на первом)-формирователн 8 ньшульсов появляются позиционные импульсы (фиг. 7 В. Каждьт позиционный импульс изменяет на единицу содержимое третьего счетчика 37 датчика 13 приращения позиции(фиг. 7 С). Первый дешифратор 1 дформпрует на первом выходе разрешающий сигнал,-а на втором выходе - импульсной сигнал (фиг. 7 П), если текущий код на выходе третьего счетчика 37 равен Ы, 2, п 0,1,2, .на второй вход сдвигающего блока...
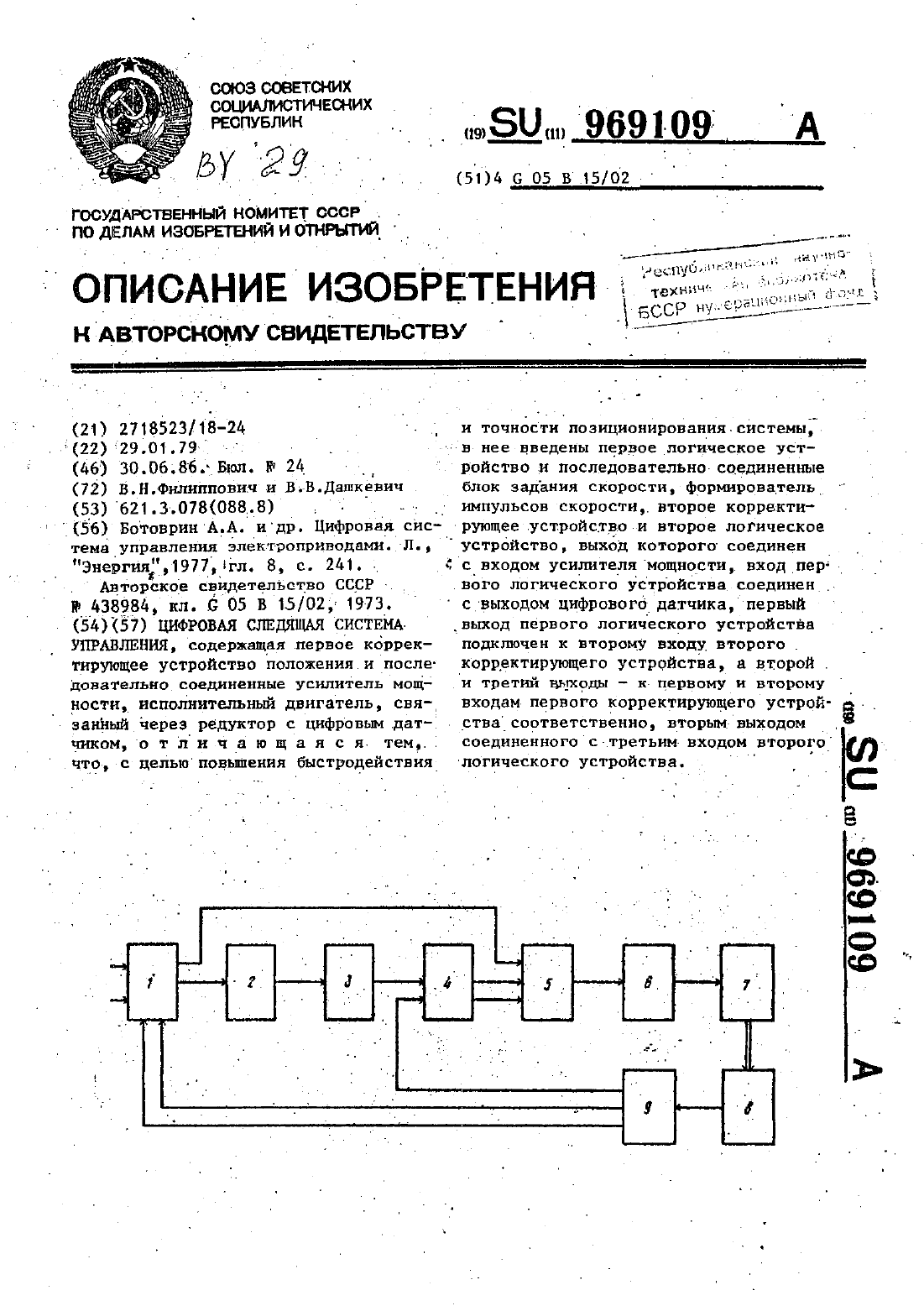
Цифровая следящая система управления
Номер патента: 29
Опубликовано: 30.05.1994
Авторы: Филиппович Валерий Николаевич, Дашкевич В. В.
МПК: G05B 15/02
Метки: управления, следящая, цифровая, система
Текст:
...0 Устройства,И Третий выходы к первому и второму входам первого корректирующего УСТРФЙСТВН соответственно, втдрм-выходом соединенного с третьим входом,второго логического устройства.Такое решение позволит повысить 5 ЫСТрОдЕйствие-и точность позиционирования системы.На чертеже-изображена блоксхема предлагаемой цифровой следящей систет мы управления.Система состоит из последовательно соединенньш первого корректируюЩегоустройства 1,...
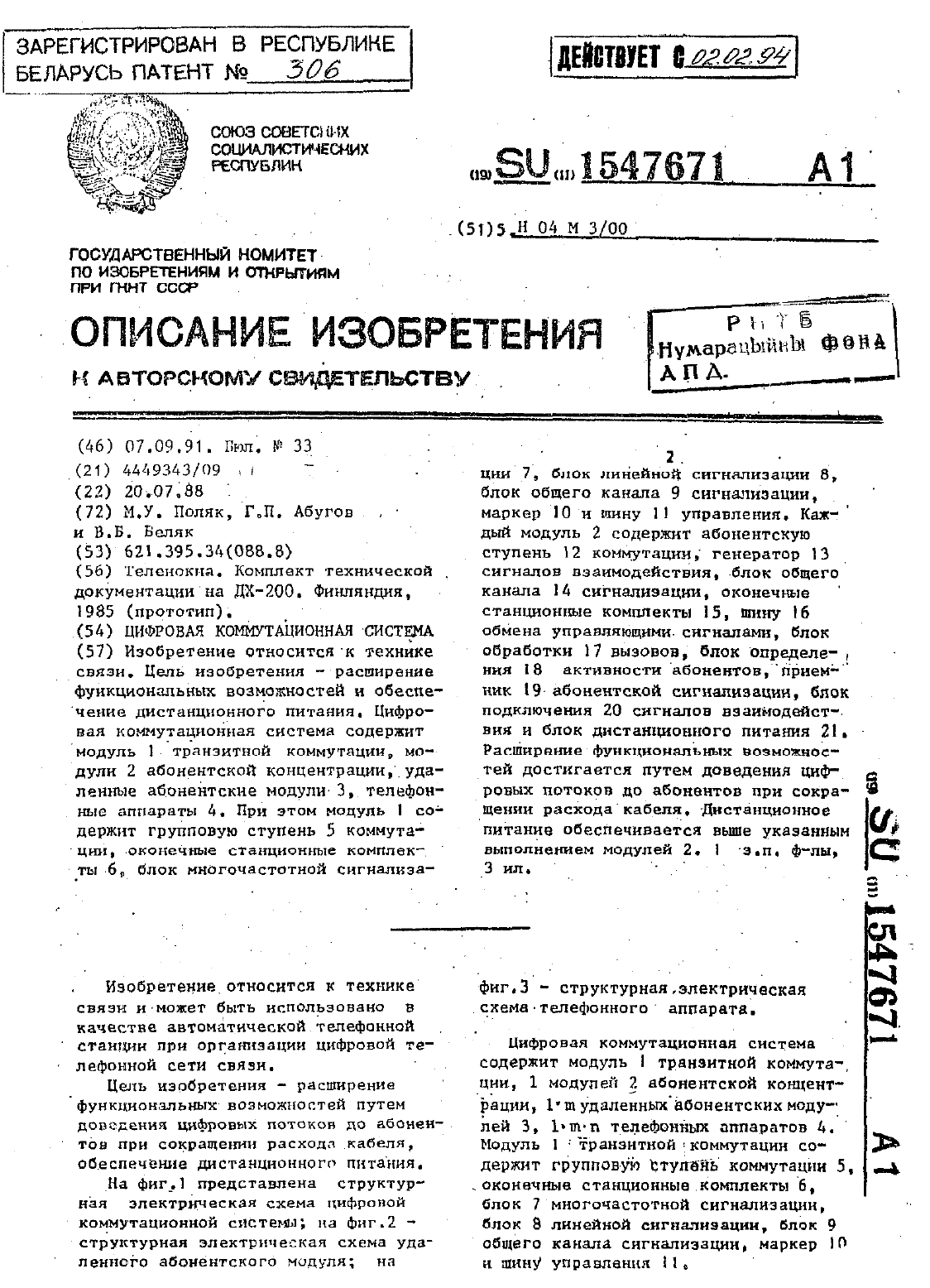
Цифровая коммутационная система
Номер патента: 306
Опубликовано: 30.12.1994
Авторы: Беляк В. Б., Абугов Г. П., Поляк М. У.
МПК: H04M 3/00
Метки: система, цифровая, коммутационная
Текст:
...32. .Поднятие микротелефонной трубки приводит к появлению логических еди-. ниц (фоновой комбинации номеронабиратела 43) или сигнала от аналоге-цифрового преобразователя 38 в абонентском канале, что фиксируется приемником 9 абонентской сигнализации (сигнал Пауза и воспринимается блоком 17 обработки вызовов как ответ на сигнал вызова. При ЭТОМ К 5 П 0 НУ 20дами модуля транзитной коммутации, 7подключения сигналов взаимодействия подается...
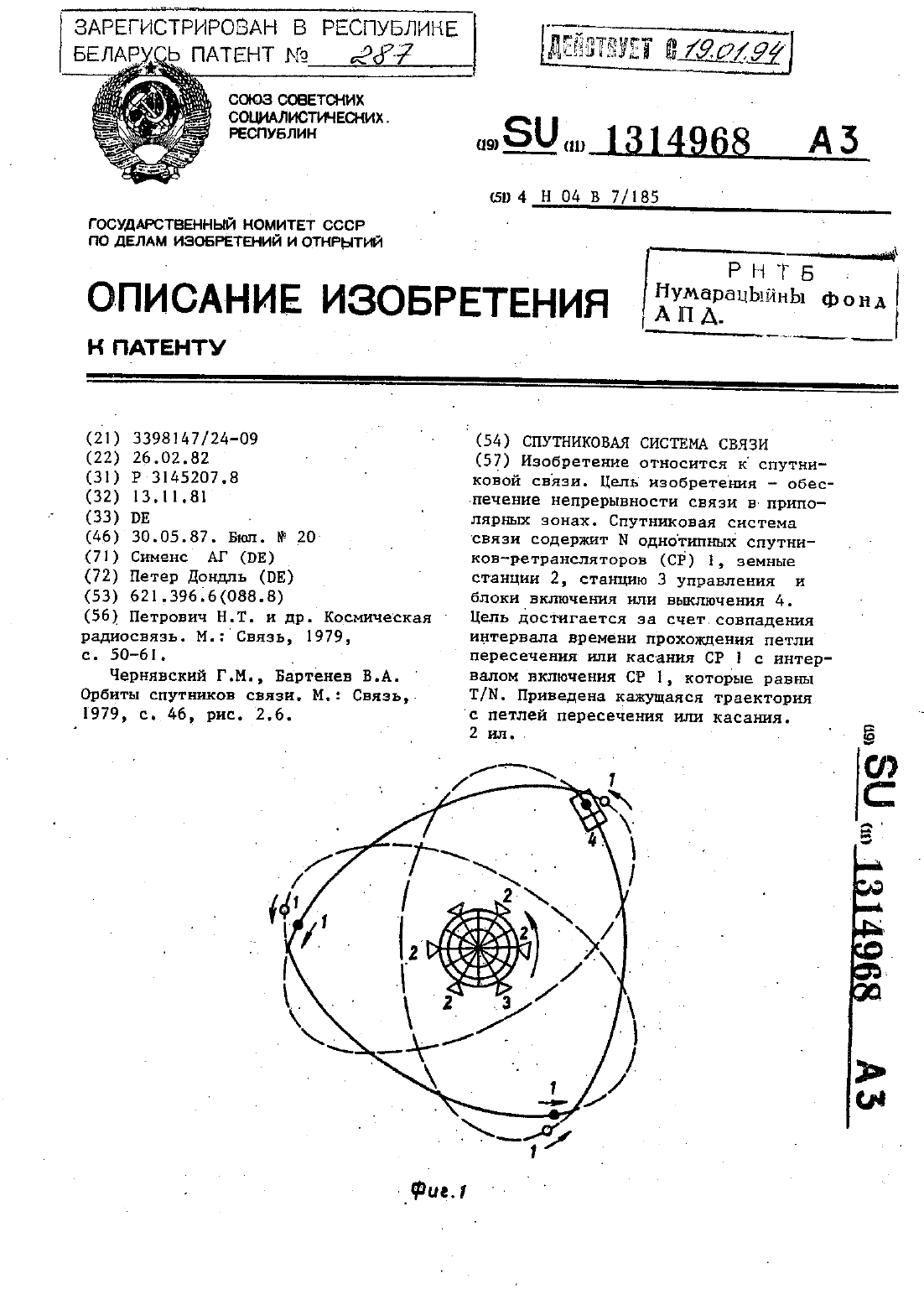
Спутниковая система связи
Номер патента: 287
Опубликовано: 30.12.1994
Автор: Петер Дондль
МПК: H04B 7/185
Метки: связи, система, спутниковая
Текст:
...касания установить на 10 восточной долготылии), то два других номинальных положения получаются сами собой.В северном полушарии одно 130 восточной долготы (над Манчжурией в Китае) и второе - 1100 западной долготы (над штатом Уайоминг, США). В этом примере исполнения неблагоприятная немецкая радиостанция связи будет во Фленсбурге где антенну придется двигать из направленя на Зенит до минимального угла меставремени, при сопровождении...
Предыдущий патент: Способ восстановления канавок поршней
Следующий патент: Устройство для непрерывного гальванического осаждения металла
Случайный патент: Способ получения креатинамидиногидролазы