Датчик угла поворота рулевого колеса автомобиля
Номер патента: U 5310
Опубликовано: 30.06.2009
Авторы: Анищик Виктор Михайлович, Ярмолович Вячеслав Алексеевич
Текст
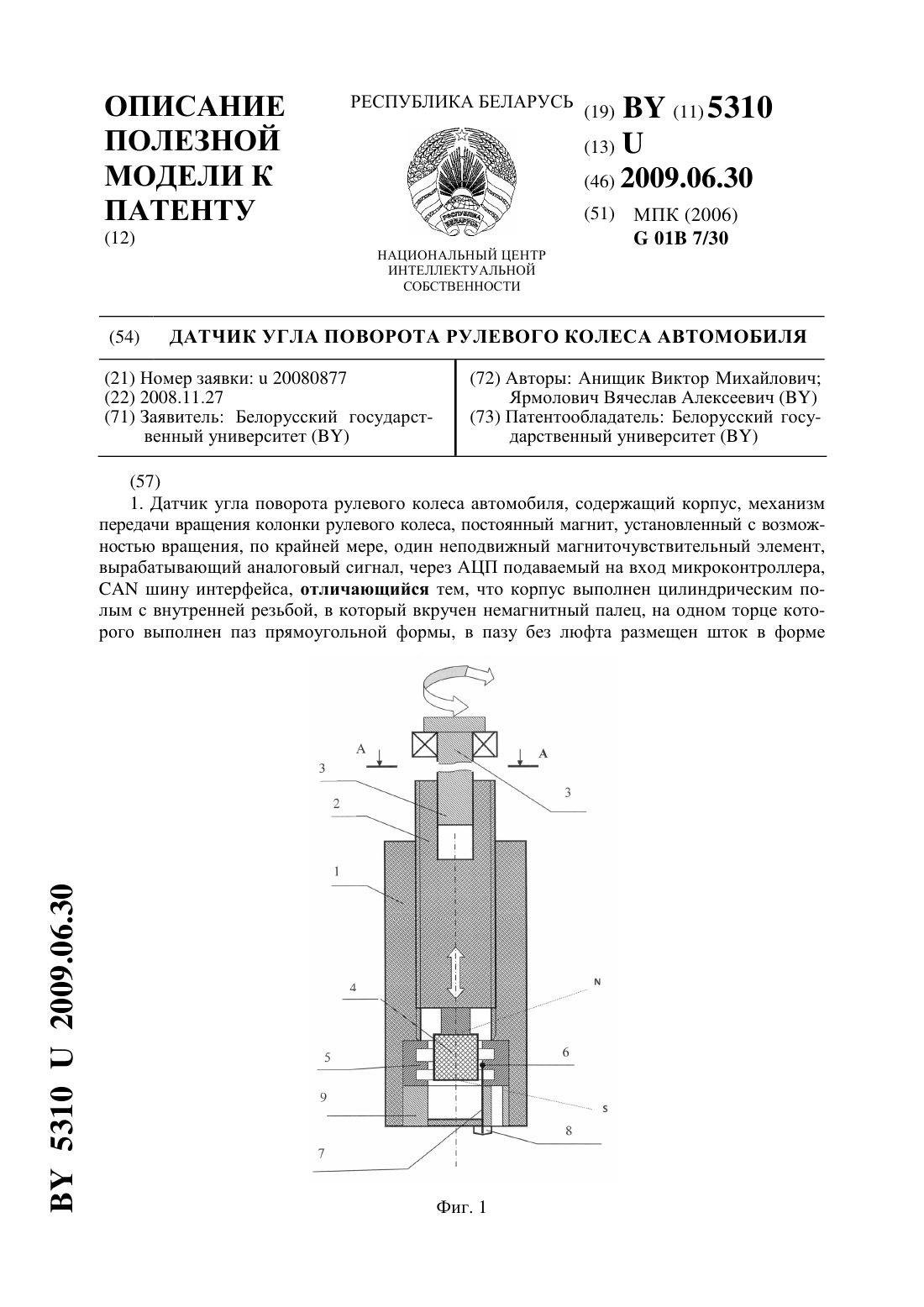
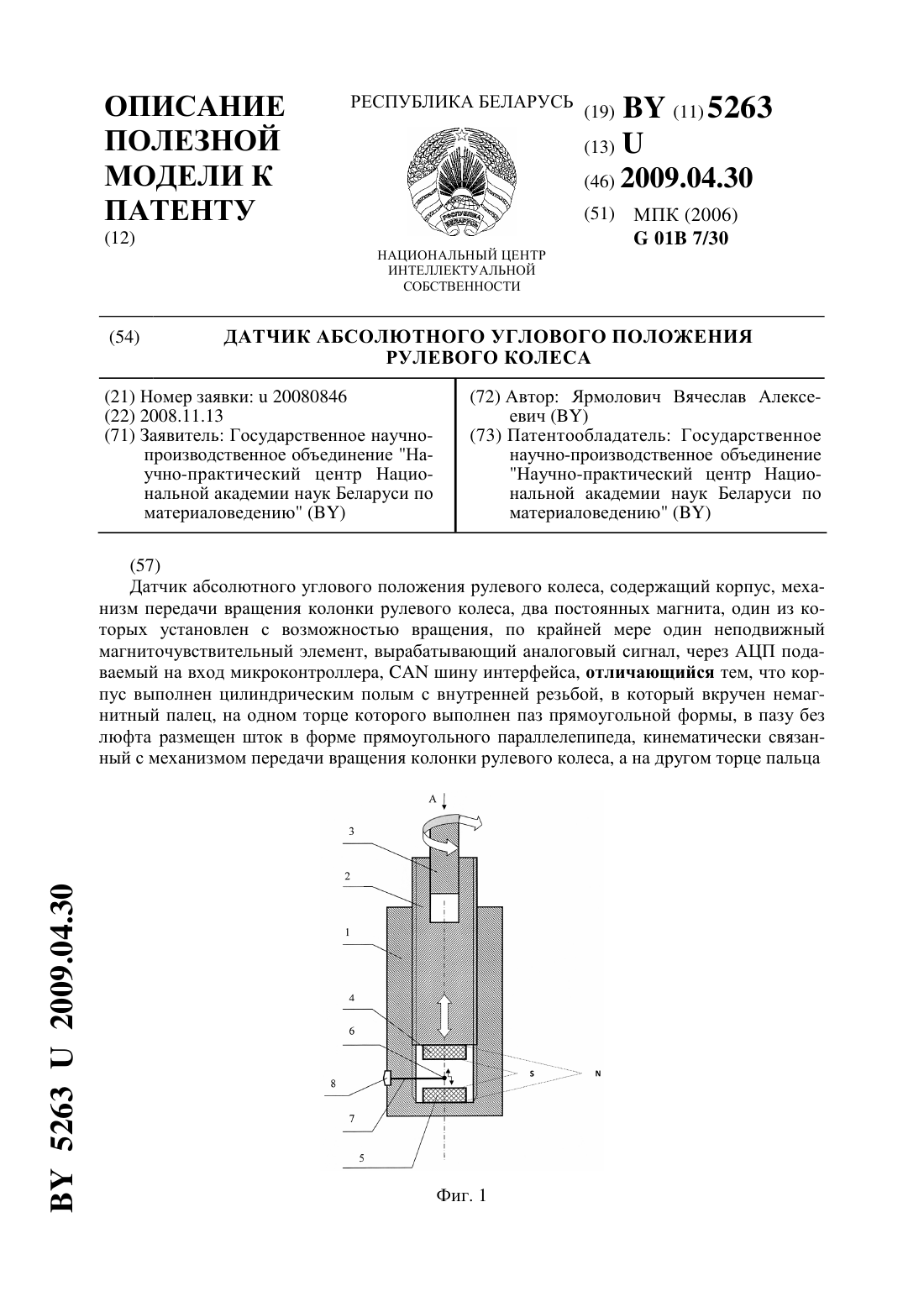
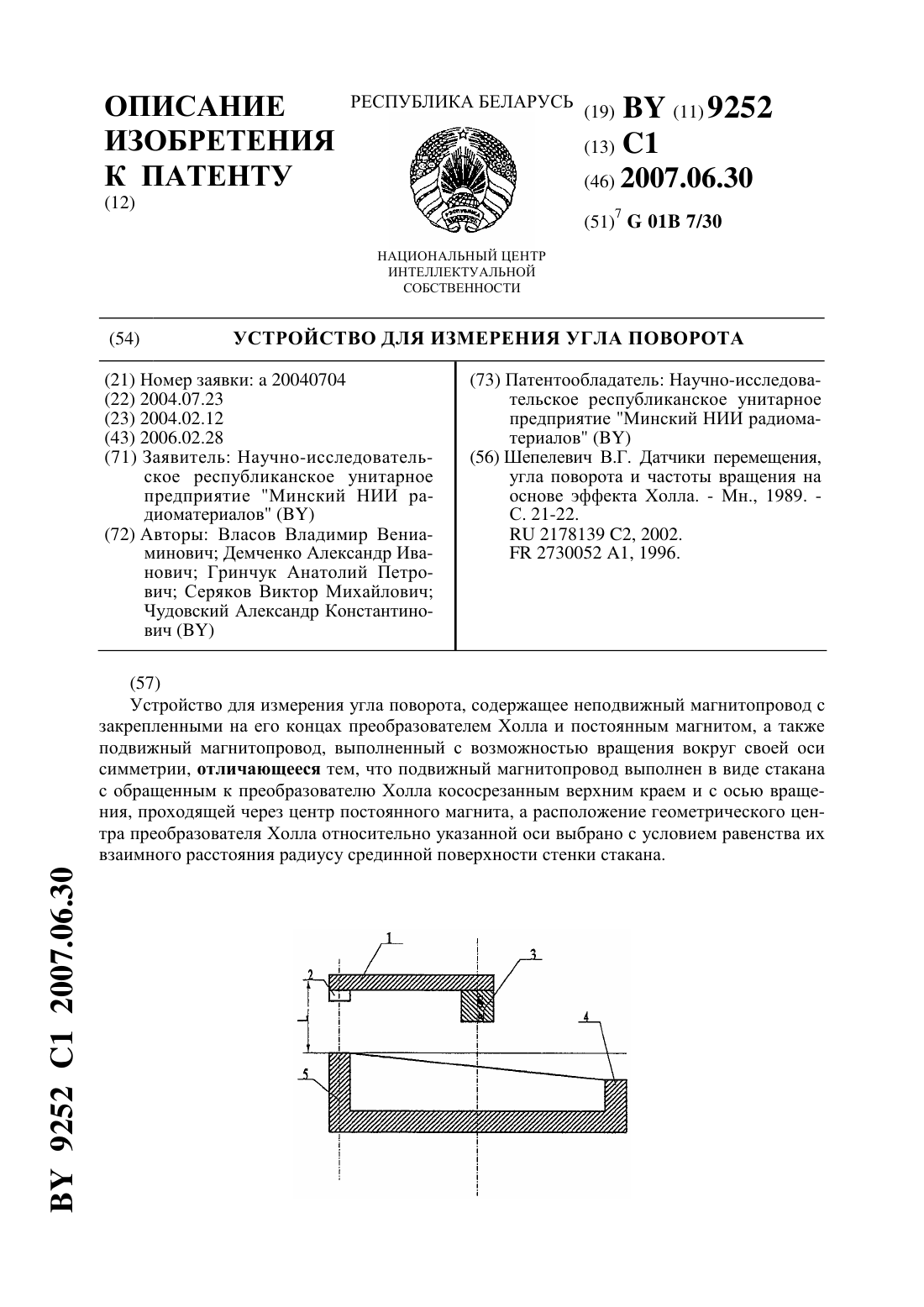
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ДАТЧИК УГЛА ПОВОРОТА РУЛЕВОГО КОЛЕСА АВТОМОБИЛЯ(71) Заявитель Белорусский государственный университет(72) Авторы Анищик Виктор Михайлович Ярмолович Вячеслав Алексеевич(73) Патентообладатель Белорусский государственный университет(57) 1. Датчик угла поворота рулевого колеса автомобиля, содержащий корпус, механизм передачи вращения колонки рулевого колеса, постоянный магнит, установленный с возможностью вращения, по крайней мере, один неподвижный магниточувствительный элемент,вырабатывающий аналоговый сигнал, через АЦП подаваемый на вход микроконтроллера, шину интерфейса, отличающийся тем, что корпус выполнен цилиндрическим полым с внутренней резьбой, в который вкручен немагнитный палец, на одном торце которого выполнен паз прямоугольной формы, в пазу без люфта размещен шток в форме 53102009.06.30 прямоугольного параллелепипеда, кинематически связанный с механизмом передачи вращения колонки рулевого колеса, а на другом торце пальца укреплен цилиндрический магнит,установленный с возможностью вращения и совместного с пальцем осевого перемещения внутри магнитомягкого ярма, установленного соосно в немагнитном корпусе, причем ярмо выполнено в виде кольца одинаковой высоты с магнитом и содержит две внутренние одинаковые радиальные проточки, а магниточувствительный элемент, например Холла, размещен на плоском держателе в средней части ярма с возможностью плавной регулировки расстояния от торца корпуса и нормалью к пластине Холла, направленной вдоль радиуса. 2. Датчик угла поворота рулевого колеса автомобиля по п. 1, отличающийся тем, что шаг резьбы составляет 1/6 части высоты магнита.(56) 1. Патент 2312363, МПК 01 3/488,01 7/30,01 5/12, 2007. 2. Патент РБ 3713, МПК 01 7/30, 2000. 3. Патент РБ 3712, МПК 01 7/30, 2000. 4. Светлана Сысоева. Автомобильные датчики положения. Современные технологии и Новые перспективы. Ч. 3. Физические основы и коммерческие перспективы технологий полупроводниковых и пермаллоевых магниторезистивных датчиков // Компоненты и технологии. -4. - 2005 (прототип). Полезная модель относится к измерительному оборудованию автомобильного транспорта, в частности к электронному датчику угла поворота рулевого колеса. Датчик функционирует на эффекте Холла и может использоваться для измерения абсолютного углового положения рулевого колеса в диапазоне углов не менее 1080, непосредственно после включения зажигания даже в отсутствие перемещений руля и после кратковременных прерываний напряжения питания. Известен программируемый датчик абсолютного углового положения для автомобильного транспорта 1, который состоит из двух механически не взаимосвязанных и изолированных друг от друга частей с постоянным воздушным зазором в пространстве между ними. Одной частью является роторный узел, другая часть представляет собой статор - совокупность неподвижных механических и электронных частей, предоставляющих через контактный интерфейс информацию об угловом положении ротора с магнитом. Магнитная система датчика состоит из программируемой винтегральной схемы двухосевого магнитного углового энкодера с линейным аналоговым, широтно-импульсно модулированным или последовательным выходом и вращающегося цилиндрического дипольного диаметрально намагниченного магнита, взаиморасположение которых в рабочем режиме устройства обеспечивает детектирование угла поворота магнитного вектора, параллельного поверхности интегральной схемы. При этом угол вычисляется по сигналам массива планарных элементов Холла, чувствительных к перпендикулярным компонентам магнитного поля. Датчик обеспечивает высокую точность определения абсолютного углового положения объекта только в диапазоне углов от 0 до 360, что явно не достаточно для его непосредственного использования для измерения абсолютного углового положения рулевого колеса, поскольку необходим диапазон детектируемых углов не менее 1080. Известны датчики и устройства для определения угла поворота на эффекте Холла 2 и углового положения вращающегося объекта 3, содержащие соответственно 2 и 3 неподвижные магниточувствительные элементы Холла и сложные магнитные системы к ним,расположенные на вращающемся роторе. В принципе диапазон детектируемых углов не ограничен, но для правильного его определения необходимо включение электропитания, а затем приведение ротора во вращение. Кроме того, основным недостатком этих устройств 2 53102009.06.30 является невозможность их непосредственного использования для определения абсолютного угла поворота рулевого колеса автомобиля при включении зажигания автомобиля(электропитания) в отсутствие перемещений руля и низкая надежность измерения угла поворота при прерывании электропитания, что является недопустимым при эксплуатации автомобильного транспорта. Повышение числа магниточувствительных элементов, взаимодействующих с источниками магнитных полей, для выработки однозначного выходного сигнала, а следовательно, и угла поворота также снижает надежность в целом. В транспортных средствах известно применение датчика 4 (прототип) абсолютного углового положения рулевого колеса 3 с- магниточувствительными элементами,которые в принципе могут быть заменены на элементы Холла или другие магниточувствительные элементы (разработка фирмыдля использования в системах динамической стабилизации автомобиля). Поворот руля вращает шестерню, ведущую две другие шестерни, на которых установлены постоянные магниты. АМР-магниточувствительные элементы регистрируют угловые положения магнитов и вырабатывают аналоговые сигналы, через АЦП подаваемые на вход микроконтроллера. Количество зубьев в ведомых шестернях различно, что обеспечивает их вращение с разными скоростями. Сканируя оба фактических угла поворота, можно вычислить общий угол поворота руля даже без счетчика оборотов. После нескольких оборотов руля каждая шестерня возвращается в свое начальное положение. Благодаря системе шестерен обеспечивается достаточная точность измерений в угловом диапазоне 780. Угол и скорость поворота руля выводятся в формате . Количество магниточувствительных элементов не менее 2-х и зависит от архитектуры избыточности (дублирования компонент), т.е. 4,6 и т.д., которые могут не только повышать надежность функционирования, но и снижать ее при зависании микроконтроллера, следствие обработки дополнительного числа сигналов. Недостатком описанного устройства является сложность механической конструкции датчика, содержащего 3 шестерни, механизм их возврата и малый уровень детектируемых магнитных полейэлементами (слабая помехозащищенность от внешних электромагнитных полей), что в целом снижает надежность функционирования датчика. Задачей, решаемой в настоящей предложенной полезной модели, является повышение надежности датчика за счет упрощения механической конструкции и уменьшения количества магниточувствительных элементов. При этом надежно определяется абсолютное угловое положение рулевого колеса в диапазоне углов не менее 1080, непосредственно после включения зажигания даже в отсутствие перемещений руля и после кратковременных прерываний напряжения питания. Решение поставленной задачи достигается тем, что датчик угла поворота рулевого колеса автомобиля содержит корпус, механизм передачи вращения колонки рулевого колеса,постоянный магнит, установленный с возможностью вращения, по крайней мере, один неподвижный магниточувствительный элемент, вырабатывающий аналоговый сигнал, через АЦП подаваемый на вход микроконтроллера,шину интерфейса, отличается тем,что корпус выполнен цилиндрическим полым с внутренней резьбой, в который вкручен немагнитный палец, на одном торце которого выполнен паз прямоугольной формы, в пазу без люфта размещен шток в форме прямоугольного параллелепипеда, кинематически связанный с механизмом передачи вращения колонки рулевого колеса, а на другом торце пальца укреплен цилиндрический магнит, установленный с возможностью вращения и совместного с пальцем осевого перемещения внутри магнитомягкого ярма, установленного соосно в немагнитном корпусе, причем ярмо выполнено в виде кольца одинаковой высоты с магнитом и содержит две внутренние одинаковые радиальные проточки, а магниточувствительный элемент, например Холла, размещен на плоском держателе в средней части ярма с возможностью плавной регулировки расстояния от торца корпуса и нормалью к пластине Холла, направленной вдоль радиуса. 3 53102009.06.30 Дополнительно датчик угла поворота рулевого колеса автомобиля отличается тем, что шаг резьбы составляет 1/6 части высоты магнита. Анализ элементов датчика, приведенных в отличительной части, показывает, что некоторые из них могут встречаться по отдельности в различных аналогах технических решений. Однако в совокупности набор этих элементов не известен, поэтому является новым. Кроме того, совокупность этих элементов придает датчику новое качество функционирования и обеспечивает полное решение поставленной задачи. Поэтому заявляемое устройство соответствует критерию новизна по действующему законодательству. На фиг. 1 представлен общий вид датчика в разрезе, на фиг. 2 - вид сверху, на фиг. 3 выходной сигнал с магниточувствительного элемента Холла как функция угла поворота макета рулевого колеса. Датчик может встраиваться в рулевую колонку и содержит полый немагнитный цилиндрический корпус 1 с внутренней резьбой, в который вкручен немагнитный палец 2, на одном конце (торце) которого выполнен паз в форме прямоугольного параллелепипеда, в паз заходит без люфта шток 3 механизма передачи вращения колонки рулевого колеса(шток 3 может вращаться в подшипниках), а на другом торце пальца 2 укреплен постоянный цилиндрический магнит 4, установленный с возможностью вращения и совместного с 2 перемещения вдоль оси симметрии цилиндрического корпуса. Магнит 4 целесообразно использовать из редкоземельных материалов, например 5 или др. Магнит 4 установлен с возможностью вращения и совместного с пальцем 2 осевого перемещения внутри магнитомягкого ярма 5, установленного соосно в немагнитном корпусе 1, причем ярмо 5 выполнено в виде кольца одинаковой высоты с магнитом 4 и содержит две внутренние одинаковые радиальные проточки, как показано на фиг. 1. Магниточувствительный элемент, например Холла 6, размещен на плоском держателе 7 в средней части ярма 6 с возможностью плавной регулировки расстояния от торца корпуса и нормалью к пластине Холла, направленной вдоль радиуса. Разъем 8 установлен в крышке 9 корпуса и с помощью регулировочных винтов обеспечивает плавную регулировку расстояния вдоль центральной части ярма с целью установления нулевой величины ЭДС Холла, когда магнит 4 размещен симметрично в ярме 5 (угол поворота рулевого колеса соответствует 0). 8 также служит для подвода напряжения питания к элементу Холла и съема выходного аналогового сигнала, который через АЦП подается на вход микроконтроллера (эти устройства не показаны, поскольку описаны в прототипе), и в дальнейшем после обработки передается пошине интерфейса в электронную систему управления движением автомобиля. Датчик работает следующим образом. Поворот руля вращает шток 3, который в одном из концов выполнен в форме прямоугольного параллелепипеда и вставлен в паз прямоугольной формы пальца 2 практически без люфта, но и без трения. Вращение штока 3 вызывает вращение цилиндрического пальца 2, имеющего крупную внешнюю резьбу, и одновременное его перемещение вдоль оси на величину шага резьбы при каждом его повороте на 360. Присутствие смазки в трущихся поверхностях резьбы необходимо, однако может поддерживаться отдельным устройством в автоматическом режиме. Вращение рулевого колеса на три оборота влево или вправо (максимально возможное число оборотов) соответственно вызывает поворот цилиндрического пальца 2 в корпусе датчика 1 на угол до 1080. При этом магнит постоянный 4, укрепленный на торце пальца 2, вращаясь, перемещается относительно ярма 5. При этом в зазоре в месте расположения элемента Холла 6 меняется величина вектора индукции магнитного поля, который направлен вдоль радиуса (по нормали к пластине Холла). Магниточувствительный элемент Холла 6 вырабатывает однозначный и достаточно линейный от угла поворота руля (фиг. 3) аналоговый сигнал, если шаг резьбы составляет не более 1/6 части высоты магнита. Это следует из условия, что поворот на 360 смещает магнит на единичный шаг резьбы, а диапазону углов 1080 соответствует 6 оборотов. Максимальное по модулю значение ЭДС Холла соот 4 53102009.06.30 ветствует расположению элемента Холла напротив торцов магнита. Выходной сигнал через АЦП подается на вход микроконтроллера (не показан), обрабатывается в соответствии с заложенным алгоритмом, как правило, линеаризуется и передается пошине интерфейса в форме кода Грэя в электронную систему управления движением автомобиля. Следовательно, вышеизложенные сведения свидетельствуют о выполнении при использовании заявленного устройства следующей совокупности условий средство, воплощающее заявленную полезную модель, при ее осуществлении, относится к измерительному оборудованию транспорта, в частности к датчикам абсолютного углового положения рулевого колеса для заявленного датчика в том виде, как оно охарактеризовано в нижеизложенной формуле полезной модели, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов, поэтому заявляемый датчик соответствует требованию промышленная применимость по действующему законодательству средство, воплощающее заявленное, в совокупности своих признаков обладает новизной и при его осуществлении способно обеспечить достижение усматриваемого заявителем технического результата, а именно повышение надежности за счет упрощения механической конструкции и уменьшение количества магниточувствительных элементов. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
МПК: G01B 7/30
Метки: рулевого, поворота, угла, датчик, колеса, автомобиля
Код ссылки
<a href="https://by.patents.su/5-u5310-datchik-ugla-povorota-rulevogo-kolesa-avtomobilya.html" rel="bookmark" title="База патентов Беларуси">Датчик угла поворота рулевого колеса автомобиля</a>
Датчик абсолютного углового положения рулевого колеса
Номер патента: U 5263
Опубликовано: 30.04.2009
Автор: Ярмолович Вячеслав Алексеевич
МПК: G01B 7/30
Метки: рулевого, положения, датчик, углового, абсолютного, колеса
Текст:
...крайней мере один неподвижный магниточувствительный элемент, вырабатывающий аналоговый сигнал, через АЦП подаваемый на вход микроконтроллера,шину интерфейса, отличается тем, что корпус выполнен цилиндрическим полым с внутренней резьбой, в который вкручен немагнитный палец, на одном торце которого выполнен паз прямоугольной формы, в пазу без люфта размещен шток в форме прямоугольного параллепипеда, кинематически связанный с механизмом передачи...
Устройство для измерения угла поворота
Номер патента: 9252
Опубликовано: 30.06.2007
Авторы: Власов Владимир Вениаминович, Демченко Александр Иванович, Гринчук Анатолий Петрович, Чудовский Александр Константинович, Серяков Виктор Михайлович
МПК: G01B 7/30
Метки: поворота, измерения, угла, устройство
Текст:
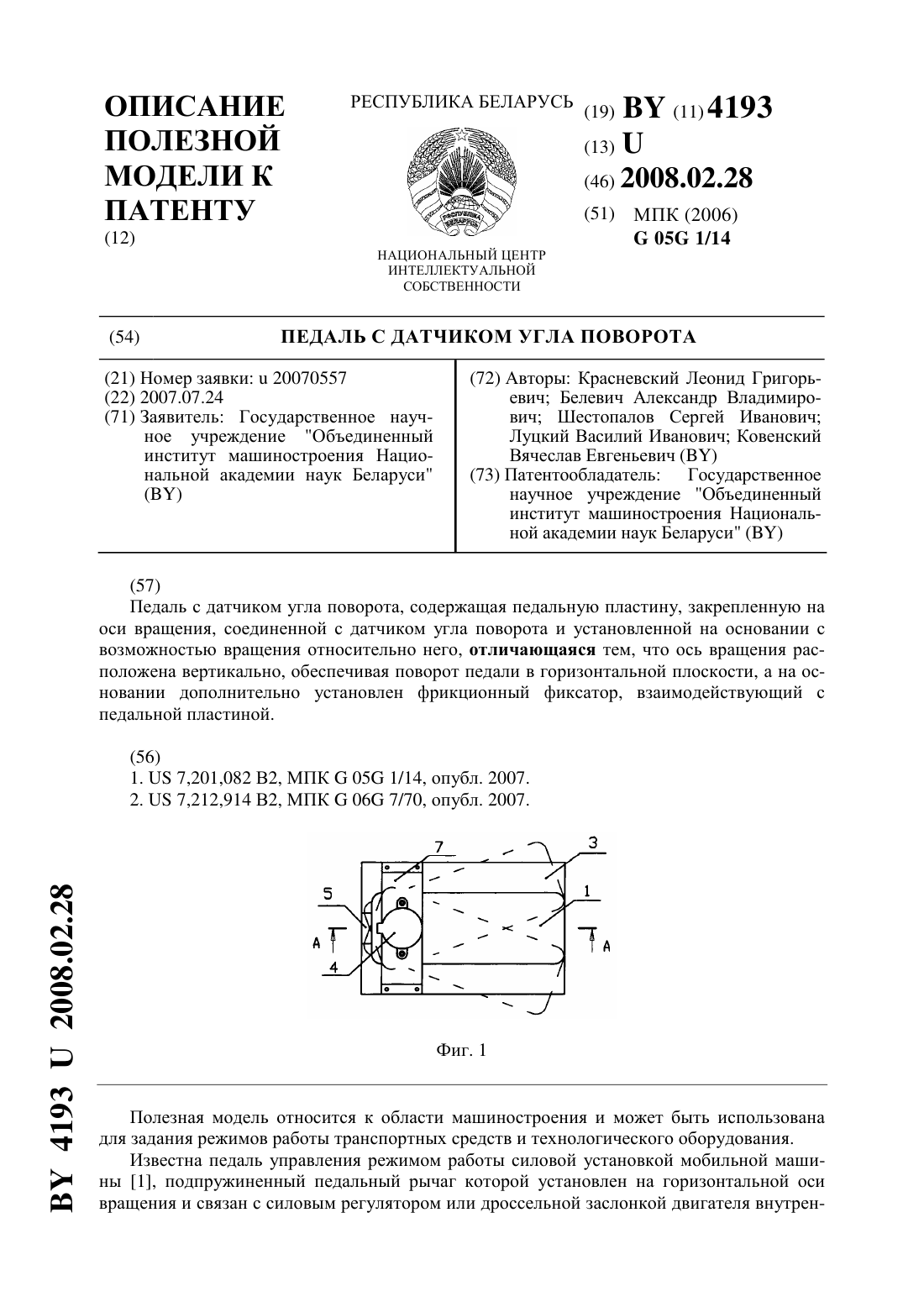
...Холла кососрезанным верхним краем и с осью вращения, проходящей через центр постоянного магнита, а расположение геометрического центра преобразователя Холла относительно указанной оси выбрано с условием равенства их взаимного расстояния радиусу срединной поверхности стенки стакана. На фигуре изображено устройство для измерения угла поворота в разрезе. Устройство для измерения угла поворота состоит из неподвижного магнитопровода 1,на...
Педаль с датчиком угла поворота
Номер патента: U 4193
Опубликовано: 28.02.2008
Авторы: Ковенский Вячеслав Евгеньевич, Луцкий Василий Иванович, Белевич Александр Владимирович, Шестопалов Сергей Иванович, Красневский Леонид Григорьевич
МПК: G05G 1/14
Метки: угла, педаль, поворота, датчиком
Текст:
...углом поворота педальной пластины в вертикальной плоскости. Данное устройство исключает механическую связь водителя с системой топливоподачи и не требует регулировки в процессе эксплуатации. К недостаткам конструкции относится заложенный в конструкции принцип задания режима работы за счет угла нажатия педали, что требует постоянного мышечного напряжения ноги для удержания заданного угла наклона стопы оператора в вертикальной плоскости....
Датчик положения зуба зубчатого колеса
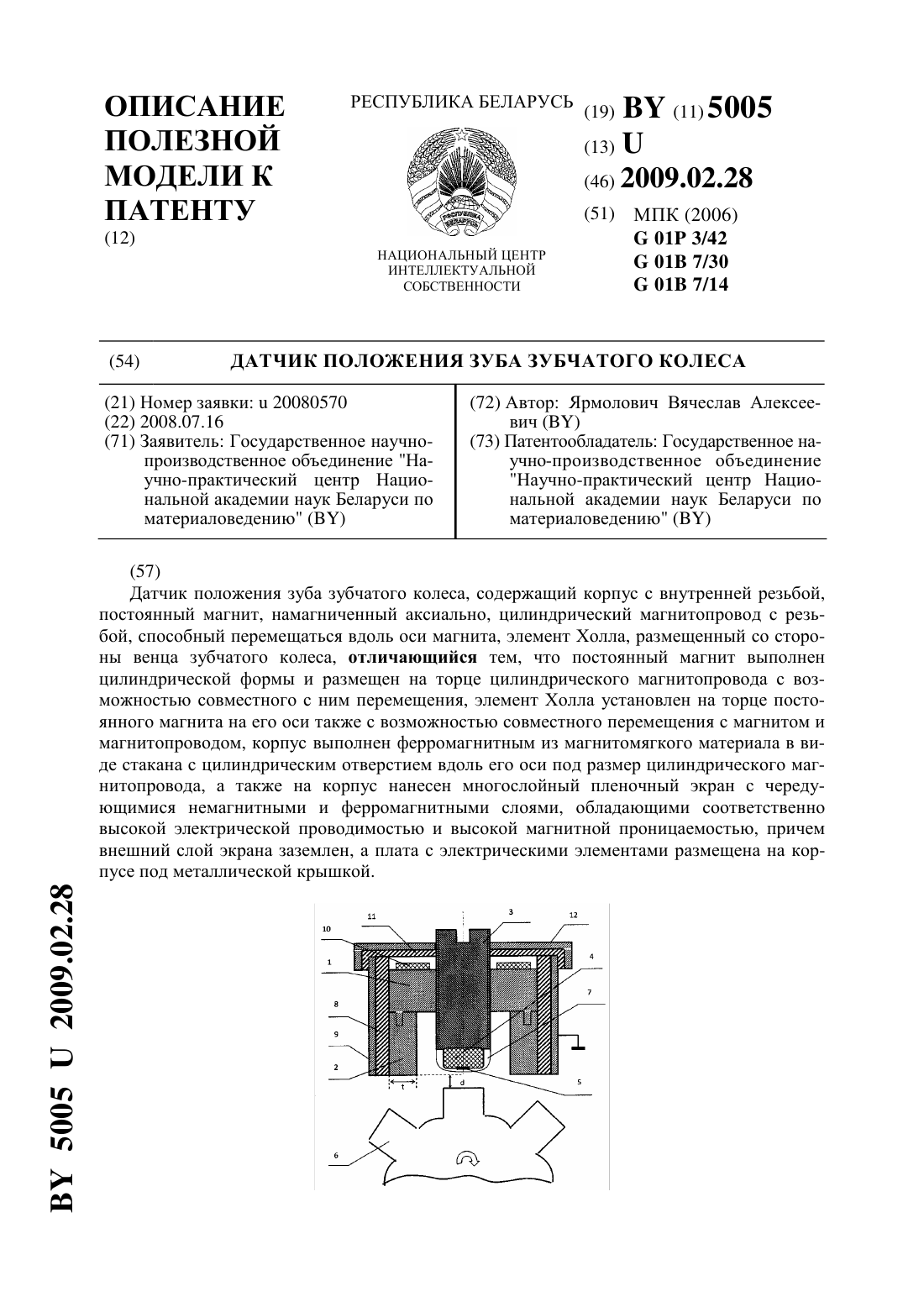
Номер патента: U 5005
Опубликовано: 28.02.2009
Автор: Ярмолович Вячеслав Алексеевич
МПК: G01P 3/42, G01B 7/30, G01B 7/14...
Метки: зуба, положения, колеса, зубчатого, датчик
Текст:
...и размещен на торце цилиндрического магнитопровода 3 с возможностью совместного с ним перемещения вдоль оси магнита 4 при вращении 3. Элемент Холла 5 установлен на торце постоянного магнита 4 на его оси также с возможностью совместного перемещения с магнитом 4 и магнитопроводом 3. Элемент Холла 5 размещен со стороны венца зубчатого колеса 6 и залит защитной оболочкой компаунда 7. На корпус (детали 1 и 2) нанесен многослойный пленочный...
Устройство определения угла поворота на эффекте Холла
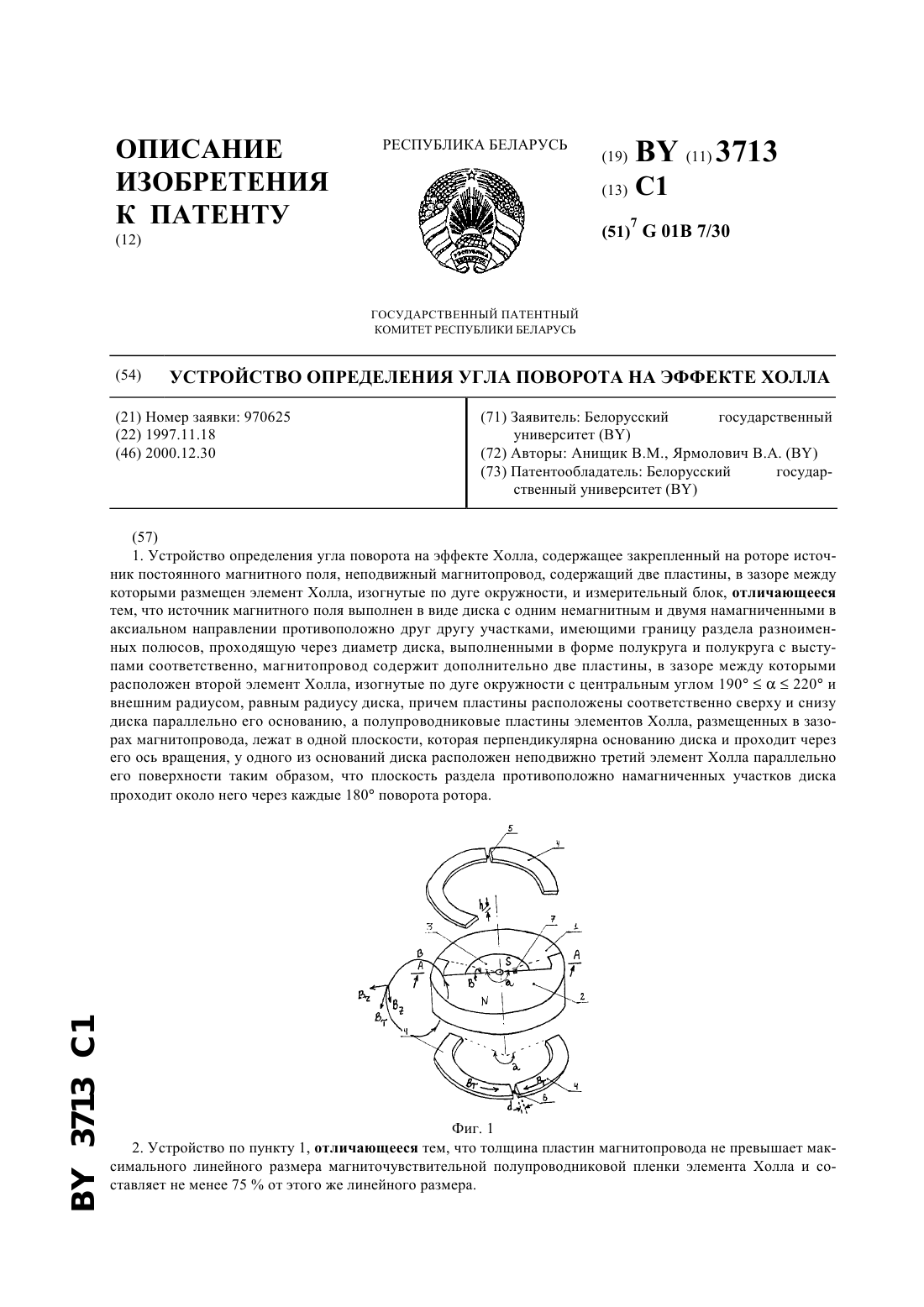
Номер патента: 3713
Опубликовано: 30.12.2000
Авторы: Ярмолович Вячеслав Алексеевич, Анищик Виктор Михайлович
МПК: G01B 7/30
Метки: определения, эффекте, угла, поворота, устройство, холла
Текст:
...переключением этих диапазонов с помощью третьего элемента Холла таким образом, что отпадает необходимость в компьютерной обработке аналоговых сигналов 1 и 2. К этим элементам относится ферромагнитный диск, в котором два участка из трех намагничены в аксиальном направлении противоположно друг другу и выполнены в форме полукруга и полукруга с выступами, имеют границу раздела разноименных полюсов, проходящую через диаметр диска....
Предыдущий патент: Устройство для образования уширения в скважине
Следующий патент: Устройство для образования многослойной куполообразной жидкостной завесы
Случайный патент: Крепь горной выработки