Трехкоординатный емкостной акселерометр
Номер патента: U 8079
Опубликовано: 30.04.2012
Авторы: Ефремов Георгий Игнатьевич, Мухуров Николай Иванович, Жвавый Сергей Павлович
Текст
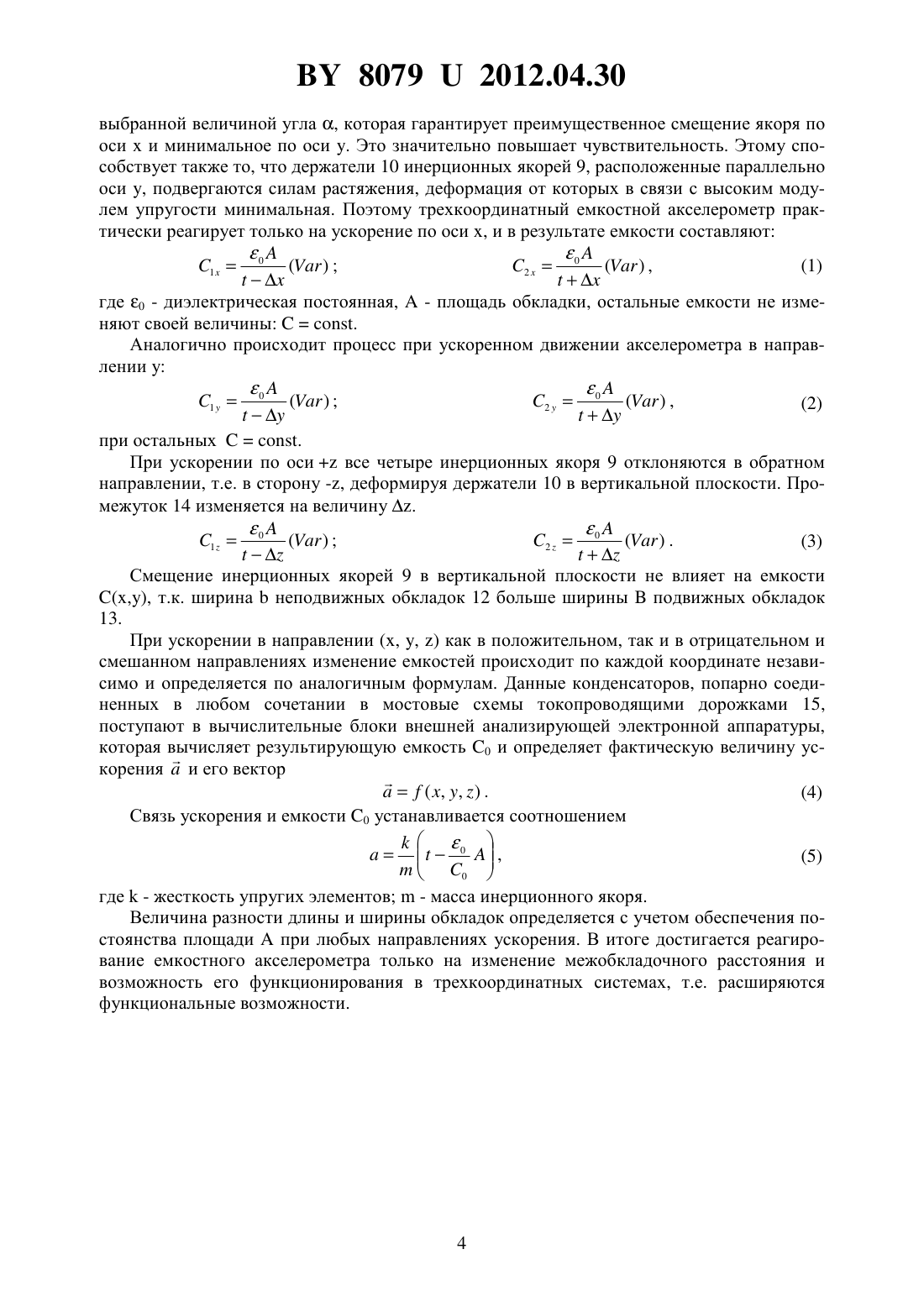
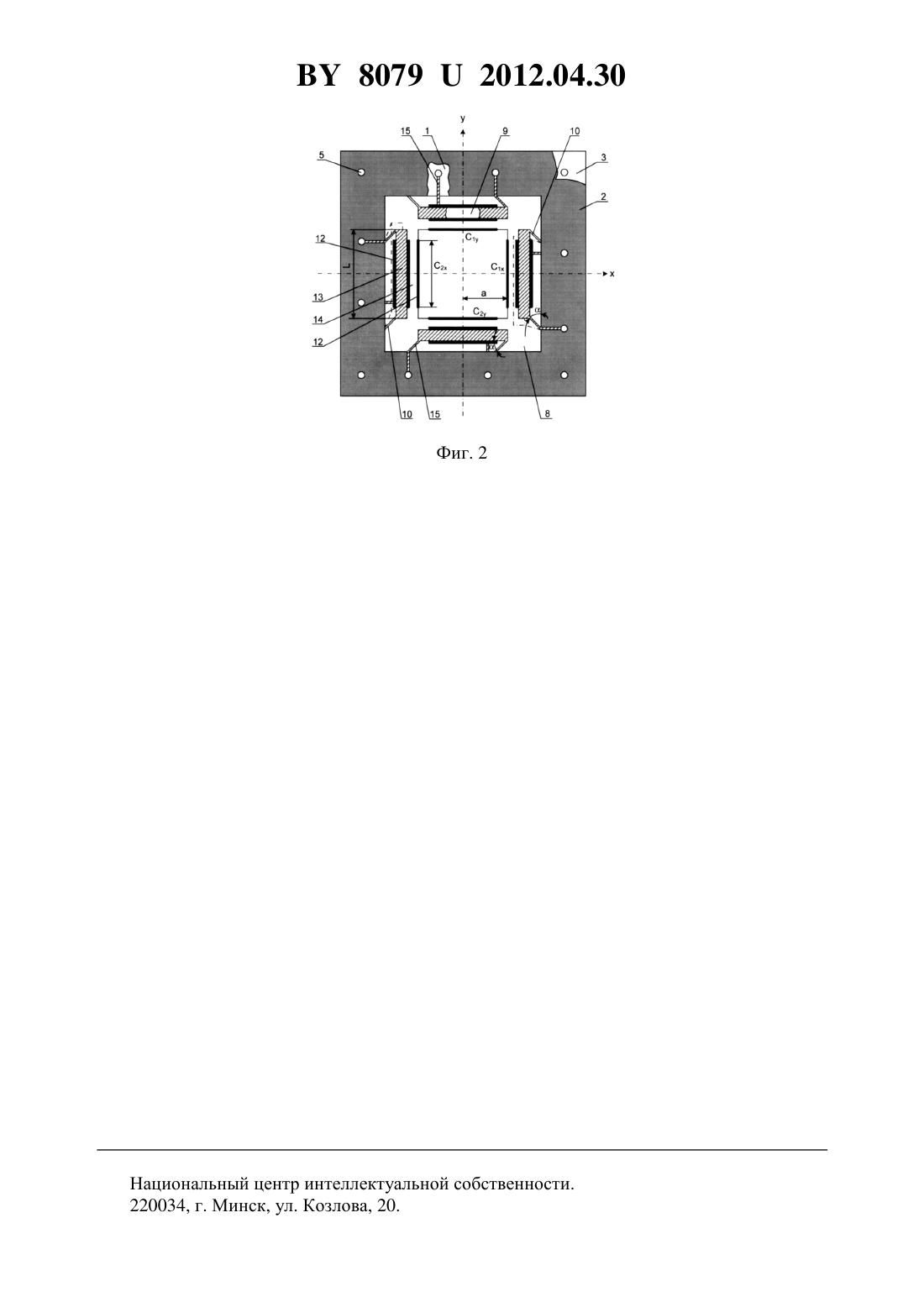
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Государственное научное учреждение Институт физики имени Б.И. Степанова Национальной академии наук Беларуси(72) Авторы Мухуров Николай Иванович Ефремов Георгий Игнатьевич Жвавый Сергей Павлович(73) Патентообладатель Государственное научное учреждение Институт физики имени Б.И. Степанова Национальной академии наук Беларуси(57) Трехкоординатный емкостной акселерометр, содержащий диэлектрические подложку,рамку, якорь с гибкими балочными держателями, размещенными на углах якоря, емкостные неподвижные и подвижные разновеликие по длине на 2 обкладки, образующие в плоскостиконденсаторы с межобкладочным промежутком , токопроводящие дорожки, соединяющие обкладки с периферийными штырьками, отличающийся тем, что в центральной части подложки выполнено квадратное углубление, на дне которого концентрично размещен квадратный выступ, а рамка уложена на подложку и в ней выполнено квадратное окно со сторонами, равными сторонам углубления, и в нем параллельно его сторонам расположены четыре якоря, выполненных в форме вытянутых параллелепипедов квадратного сечения, при этом держатели якоря имеют квадратное сечение, расположены под углом 2030 к якорю и соединены со сторонами окна, а на рамке размещена пластина, в центральной части которой выполнена квадратная полость,аналогичная углублению в подложке, причем неподвижные обкладки сформированы в углублении под якорем, на противолежащей поверхности полости над якорем, боковых сторонах выступа напротив якорей, а подвижные обкладки размещены на четырех сторонах якорей и ширина их меньше, чем у неподвижных на 2.(56) 1. Галушков А.И., Панкратов О.В., Погалов А.И. и др. Методы проектирования и калибровки микроэлектронных пьезорезистивных преобразователей ускорения // Микро- и наносистемная техника. - 2006. -6. - С. 45-48. 2.7448, 2011. 3. Пономарев С.П. и др. Расчеты на прочность в машиностроении. - М. Наука, 1956. 569 с. Полезная модель относится к электротехнике, микроэлектронике, микромеханике и может быть использована в системах навигации, управления, связи. Известен пьезорезистивный преобразователь ускорений 1. Он представляет собой комбинированный датчик инерционного принципа действия с двойным преобразованием внешнего сигнала. Преобразователь выполнен на диэлектрической плоской жесткой подложке, состоящей из рамки с окном в центральной части и якоря квадратной формы, размещенного в этом окне. С рамкой он соединен восемью упругими прямолинейными балочными держателями, расположенными попарно по углам якоря перпендикулярно его сторонам. Между всеми сторонами якоря и окна расположен паз шириной, равной длине держателей. На держателях сформированы чувствительные элементы - твердотельные кремниевые пьезорезисторы. Они токопроводящими дорожками соединены с контактными площадками на периферии рамки. Ускоренное движение преобразователя смещает якорь по оси , вследствие чего деформируются держатели, являющиеся первичными преобразователями, и размещенные на них слои пьезорезиста - вторичные преобразователи. Изменение сопротивления пьезорезисторов фиксируется внешней мостовой электрической схемой. Устройство обеспечивает индикацию ускорений только в одном, перпендикулярном плоскости якоря, направлении. Пьезорезистивный преобразователь ускорения имеет ограниченные функциональные возможности. Наиболее близким по технической сущности является микродатчик ускорений 2. Он содержит диэлектрическую плоскую подложку, состоящую из рамки с окном в средней части, в котором размещен квадратный якорь, соединенный с рамкой гибкими балочными держателями. Они размещены на углах якоря перпендикулярно его сторонам и имеют Гобразную форму. Их первые участки соединены с якорем, расположены параллельно одной из осей подложки , а вторые участки, равные по длине первым, закреплены в рамке,расположены параллельно другой осии попарно направлены в противоположные стороны (от оси ). На четырех сторонах держателей сформированы токопроводящие дорожки. На торцевых сторонах якоря и прилегающих к ним сторонах окна сформированы тонкопленочные металлические соответственно подвижные и неподвижные емкостные обкладки конденсаторов. Первые по длине короче вторых на 2, где- величина межобкладочного промежутка. Акселерометр функционирует при изменении ускорения только в плоскости, т.е. лишь в двух координатахи , что ограничивает возможности его использования в устройствах, чувствительных к перемещению в пространстве. Технической задачей полезной модели является расширение функциональных возможностей емкостного акселерометра за счет осуществления индикации ускорения по трем осям координат. Решение технической задачи достигается тем, что в трехкоординатном емкостном акселерометре, содержащем диэлектрические подложку, рамку, якорь с гибкими балочными держателями, размещенными на углах якоря, емкостные неподвижные и подвижные разновеликие по длине на 2 обкладки, образующие в плоскостиконденсаторы с ме 2 80792012.04.30 жобкладочным промежутком , токопроводящие дорожки, соединяющие обкладки с периферийными штырьками. В центральной части подложки выполнено квадратное углубление, на дне которого концентрично размещен квадратный выступ, а рамка уложена на подложку и в ней выполнено квадратное окно со сторонами, равными сторонам углубления, и в нем параллельно его сторонам расположены четыре якоря, выполненных в форме вытянутых параллелепипедов квадратного сечения. При этом держатели якоря имеют квадратное сечение, расположены под углом 2030 к якорю и соединены со сторонами окна. На рамке размещена пластина, в центральной части которой выполнена квадратная полость, аналогичная углублению в подложке, причем неподвижные обкладки сформированы в углублении под якорем, на противолежащей поверхности полости над якорем, боковых сторонах выступа напротив якорей, а подвижные обкладки размещены на четырех сторонах якорей и ширина их меньше, чем у неподвижных на 2. Сущность полезной модели поясняется фиг. 1, 2. На фиг. 1 представлено поперечное сечение трехкоординатного емкостного акселерометра по оси . На фиг. 2 представлен вид сверху на трехкоординатный емкостной акселерометр. Трехкоординатный емкостный акселерометр содержит диэлектрические подложку 1,размещенные на ней последовательно рамку 2 и пластину 3 (фиг. 1). В них на периферии выполнены концентричные отверстия 4, в которые вставлены соединяющие детали штырьки 5. В центральной части подложки 1 выполнено квадратное углубление 6, на дне которого концентрично размещен квадратный выступ 7. В рамке 2, уложенной на подложку 1, выполнено квадратное окно 8 (фиг. 2) со сторонами, равными сторонам углубления 6. В окне 8 параллельно его сторонам расположены четыре инерционных якоря 9 в форме вытянутых параллелепипедов квадратного сечения. Концы якорей 9 соединены со сторонами окна 8 упругими держателями 10 также квадратного сечения. Держатели 10 размещены под углом 2030 к соответствующим осямии вместе с якорями образуют симметричные относительно осей параллелограммы, которые обеспечивают параллельность перемещения якоря в трех направлениях. На рамке 2 расположена пластина 3, в центральной части которой выполнена квадратная полость 11, аналогичная углублению 6. В углублении 6 под якорями 9, на противолежащей поверхности полости 11 над якорями 9, боковых сторонах выступа 7 напротив якорей 9 сформированы тонкопленочные металлические неподвижные обкладки 12, на четырех сторонах якорей - аналогичные подвижные обкладки 13 конденсаторов с промежутком 14 между обкладками, равным . Неподвижные обкладки 12 короче и шире подвижных обкладок, т.е.( - длина неподвижной обкладки,- длина подвижной обкладки),( - ширина неподвижной обкладки,- ширина подвижной обкладки), они электрически или изолированы друг от друга, или соединены те, которые расположены на противолежащих сторонах выступа. Подвижные 13 и неподвижные 12 обкладки токопроводящими дорожками 15 соединены со штырьками 5. Неподвижные 12 и подвижные 13 обкладки совместно с расстоянием 14 между ними образуют в горизонтальной плоскости конденсаторыи , в вертикальной плоскости конденсатор . При движении с ускорением, например, в направлении оси х инерционные якоря 9,перпендикулярные оси , сместятся в противоположную сторону, т.е. в направлении -. Держатели 10 изогнутся, изменится уголна, промежуток между обкладками 14,расположенный на расстоянииа от центра выступа 7, уменьшится на , симметричный промежуток 14 увеличится на такую же величину . Концы обоих держателей 10 переместятся на величину, которая благодаря углу 2030 значительно меньше, при этом подвижные обкладки 13 сместятся относительно неподвижных обкладок 12 в направлении оси. Площадь конденсаторовостанется постоянной, т.к.на величину 2, определяемую методами теории упругости 3 с учетом конструктивных и функциональных параметров. Величина смещения держателей по осиобеспечивается 3 80792012.04.30 выбранной величиной угла , которая гарантирует преимущественное смещение якоря по осии минимальное по оси . Это значительно повышает чувствительность. Этому способствует также то, что держатели 10 инерционных якорей 9, расположенные параллельно оси , подвергаются силам растяжения, деформация от которых в связи с высоким модулем упругости минимальная. Поэтому трехкоординатный емкостной акселерометр практически реагирует только на ускорение по оси , и в результате емкости составляют 10 ( )20 ( ) ,(1)где 0 - диэлектрическая постоянная,- площадь обкладки, остальные емкости не изменяют своей величины. Аналогично происходит процесс при ускоренном движении акселерометра в направлении 10 ( )20 ( ) ,(2)при остальных. При ускорении по осивсе четыре инерционных якоря 9 отклоняются в обратном направлении, т.е. в сторону -, деформируя держатели 10 в вертикальной плоскости. Промежуток 14 изменяется на величину .10 ( )20 ( ) .(3)Смещение инерционных якорей 9 в вертикальной плоскости не влияет на емкости(,), т.к. ширинанеподвижных обкладок 12 больше шириныподвижных обкладок 13. При ускорении в направлении (, , ) как в положительном, так и в отрицательном и смешанном направлениях изменение емкостей происходит по каждой координате независимо и определяется по аналогичным формулам. Данные конденсаторов, попарно соединенных в любом сочетании в мостовые схемы токопроводящими дорожками 15,поступают в вычислительные блоки внешней анализирующей электронной аппаратуры,которая вычисляет результирующую емкость 0 и определяет фактическую величину ус коренияи его вектор где- жесткость упругих элементов- масса инерционного якоря. Величина разности длины и ширины обкладок определяется с учетом обеспечения постоянства площадипри любых направлениях ускорения. В итоге достигается реагирование емкостного акселерометра только на изменение межобкладочного расстояния и возможность его функционирования в трехкоординатных системах, т.е. расширяются функциональные возможности. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
МПК: G01P 15/125
Метки: акселерометр, емкостной, трехкоординатный
Код ссылки
<a href="https://by.patents.su/5-u8079-trehkoordinatnyjj-emkostnojj-akselerometr.html" rel="bookmark" title="База патентов Беларуси">Трехкоординатный емкостной акселерометр</a>
Акселерометр
Номер патента: 10984
Опубликовано: 30.08.2008
Авторы: Акунец Вячеслав Валерьевич, Таратын Игорь Александрович, Гринчук Анатолий Петрович
МПК: G01P 15/125
Метки: акселерометр
Текст:
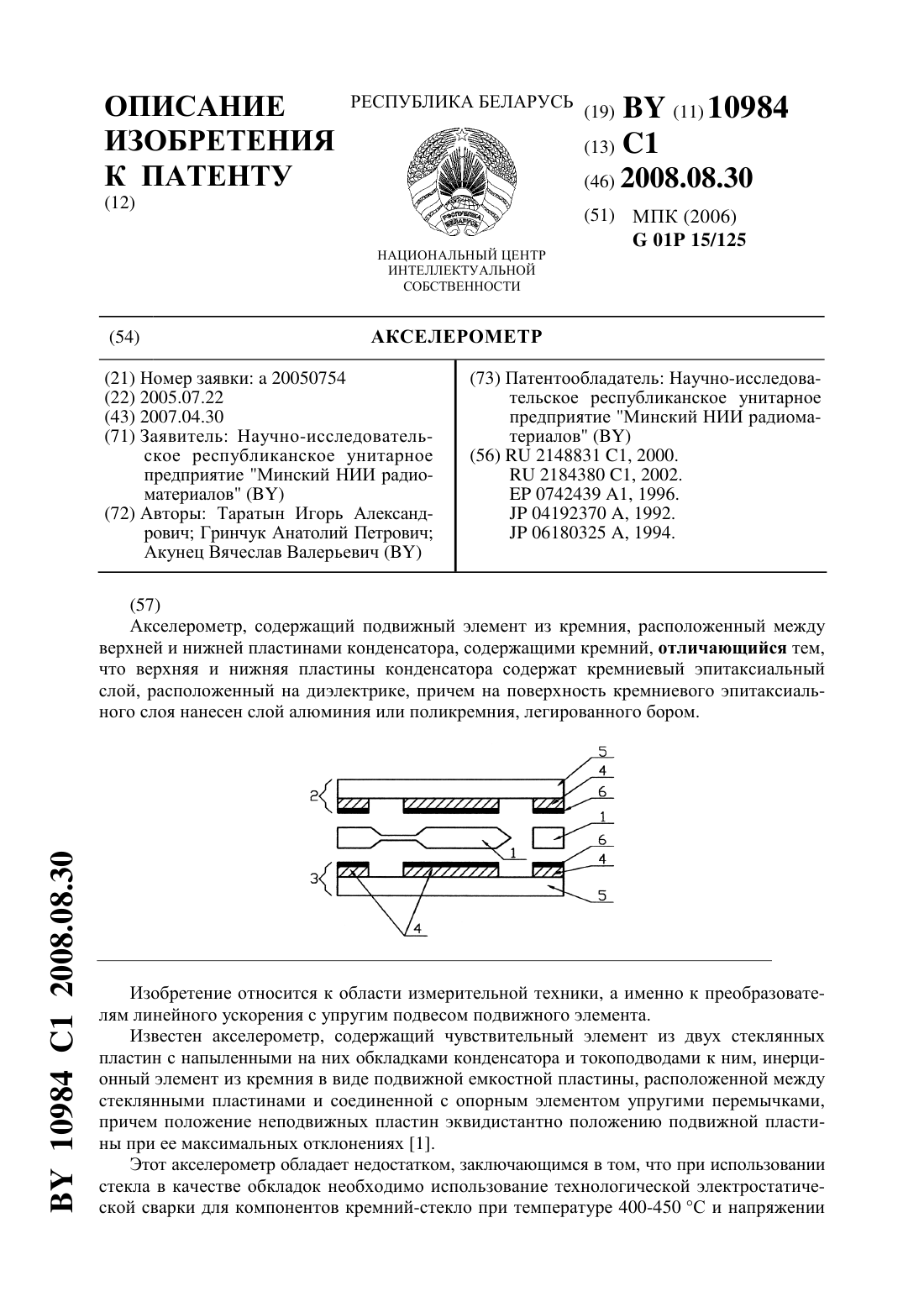
...недостатком, заключающимся в том, что применение в качестве пластины монокристаллического кремния приводит к необходимости создания на поверхности монокристаллического кремния толстых диэлектрических слоев на основе нитрида кремния с напыленной структурой на поверхности диэлектрика, причем толщина диэлектрика должна быть достаточно большой для снижения паразитных емкостей между чувствительным элементом верхней и нижней пластин конденсатора,...
Микродатчик ускорений
Номер патента: U 7448
Опубликовано: 30.08.2011
Авторы: Мухуров Николай Иванович, Куданович Олег Николаевич, Ефремов Георгий Игнатьевич
МПК: H01H 59/00
Метки: микродатчик, ускорений
Текст:
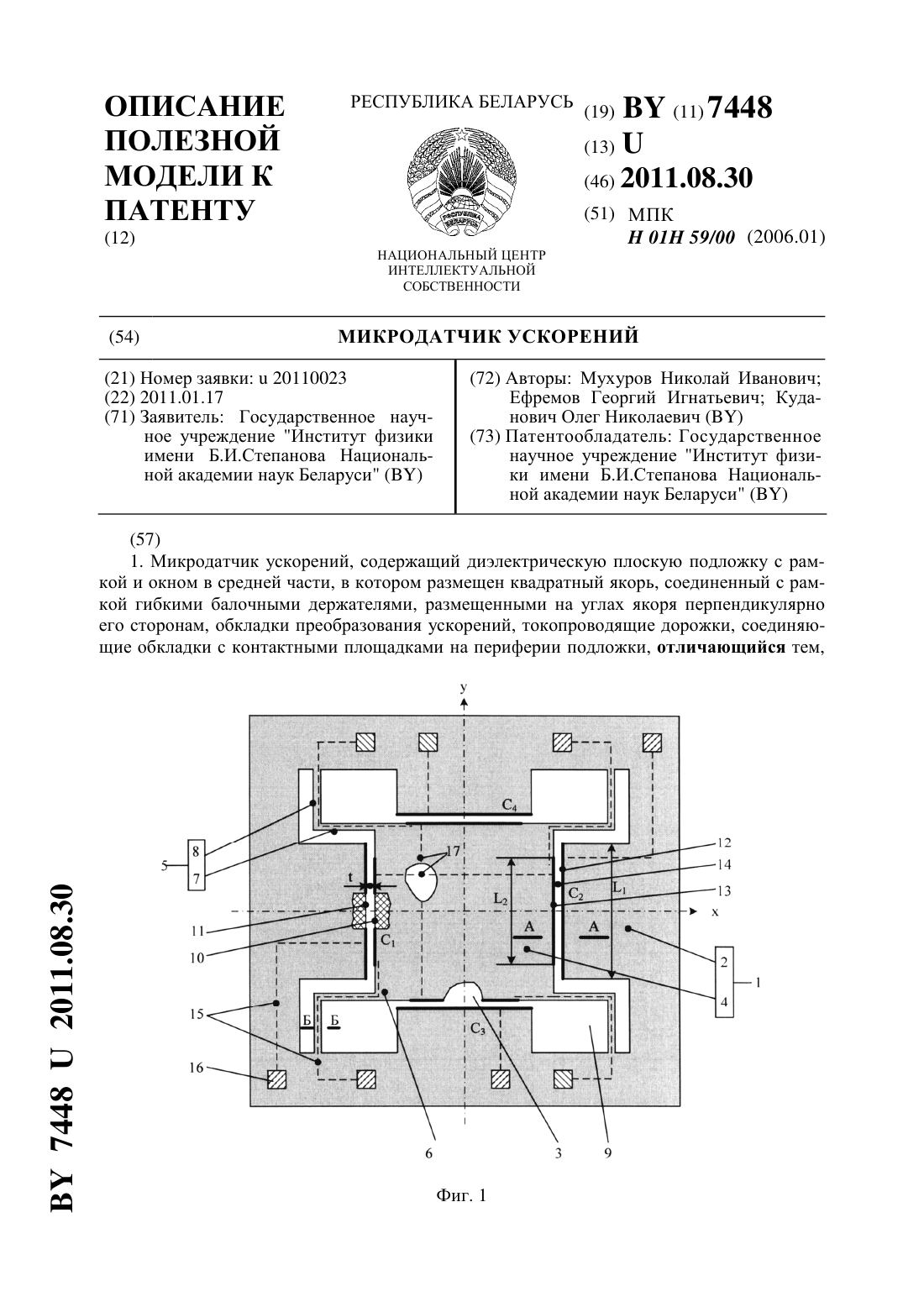
...на рамке по длине больше, чем подвижная обкладка на якоре на 2, где- ширина промежутка между обкладками, а балочные держатели выполнены Г-образными, при этом их первые участки соединены с якорем,расположены по его углам параллельно одной из осей подложки , а вторые участки, равные по длине первым, закреплены в рамке, расположены параллельно другой осии попарно направлены в противоположные стороны от оси , при этом токопроводящие дорожки...
Емкостной измеритель уровня жидкости (варианты)
Номер патента: U 2288
Опубликовано: 30.12.2005
Авторы: Вишневский Михаил Иванович, Коровайко Владимир Яковлевич
МПК: G01F 23/24, G01F 23/26
Метки: варианты, уровня, жидкости, измеритель, емкостной
Текст:
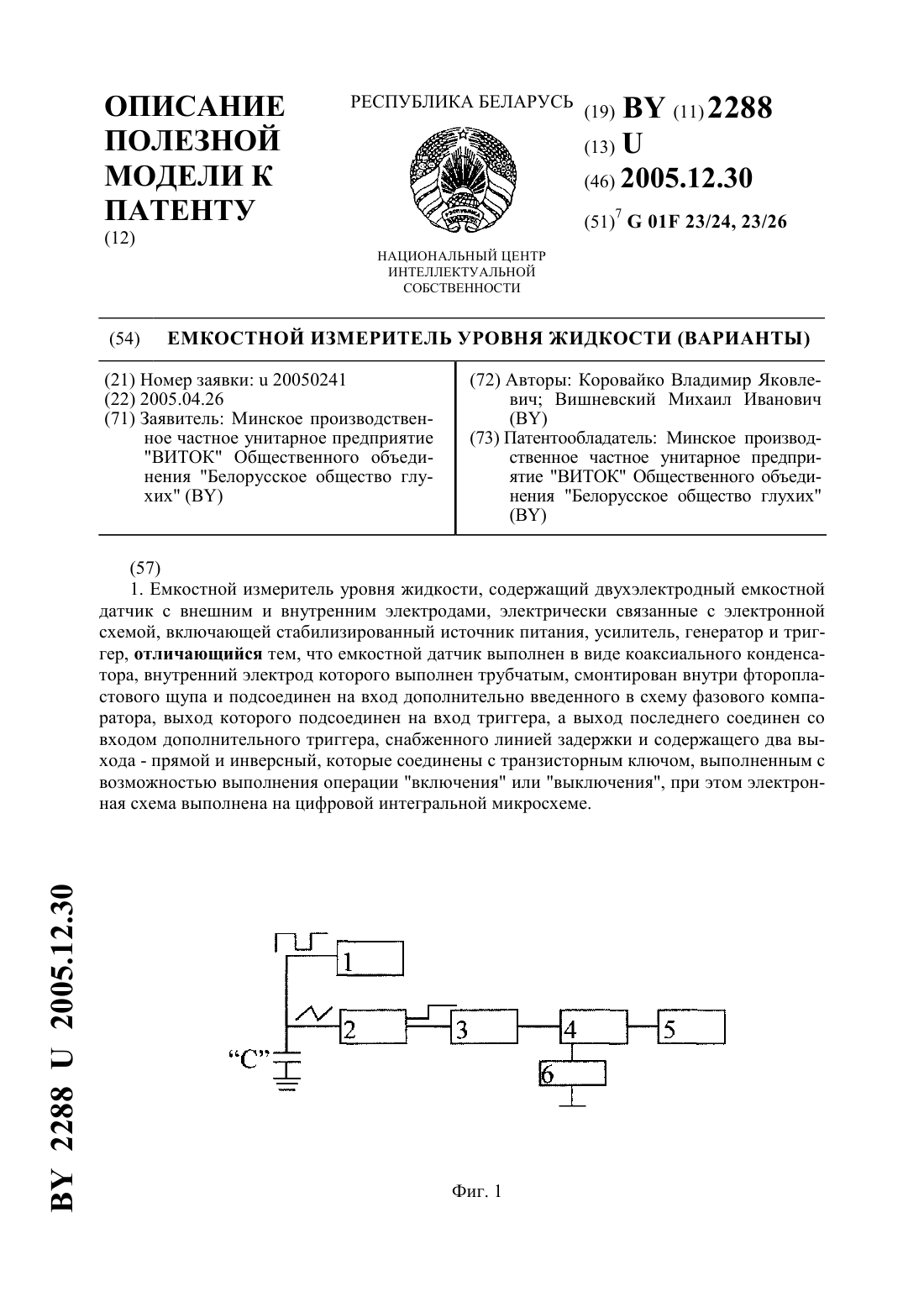
...щупа и подсоединен на вход дополнительно введенного в схему фазового компаратора, выход которого подсоединен на вход триггера, а выход последнего соединен со входом дополнительного триггера, снабженного линией задержки и содержащего два выхода - прямой и инверсный, которые соединены с транзисторным ключом, выполненным с возможностью выполнения операции включения или выключения, при этом электронная схема выполнена на цифровой...
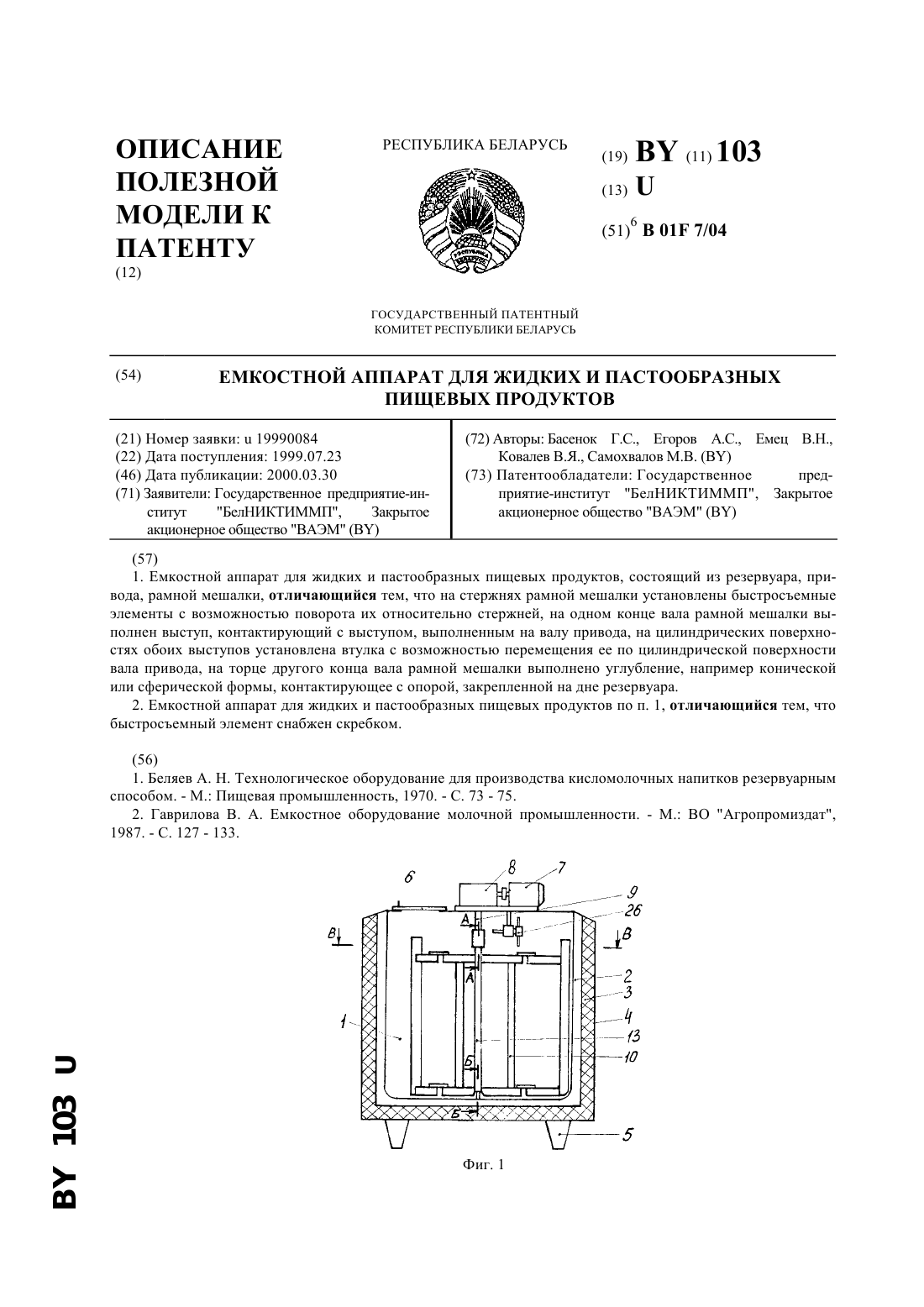
Емкостной аппарат для жидких и пастообразных пищевых продуктов
Номер патента: U 103
Опубликовано: 30.03.2000
Авторы: Ковалев Владимир Яковлевич, Басенок Геннадий Сергеевич, Емец Виктор Николаевич, Егоров Александр Сергеевич, Самохвалов Михаил Владимирович
МПК: B01F 7/04
Метки: пищевых, продуктов, емкостной, пастообразных, жидких, аппарат
Текст:
...энергоресурсов. Применение скребка на быстросъемном элементе позволяет улучшить санитарную обработку емкостного аппарата после приготовления как пастообразных, так и жидких проектов, также сокращает сроки санитарной обработки, расход моющих средств и энергоресурсов. На фиг. 1 изображен чертеж-схема общего вида емкостного аппарата для жидких и пастообразных пищевых продуктов, на фиг. 2 -разрез фиг. 1, на фиг. 3 - разрез фиг. 1, на фиг. 4 -...
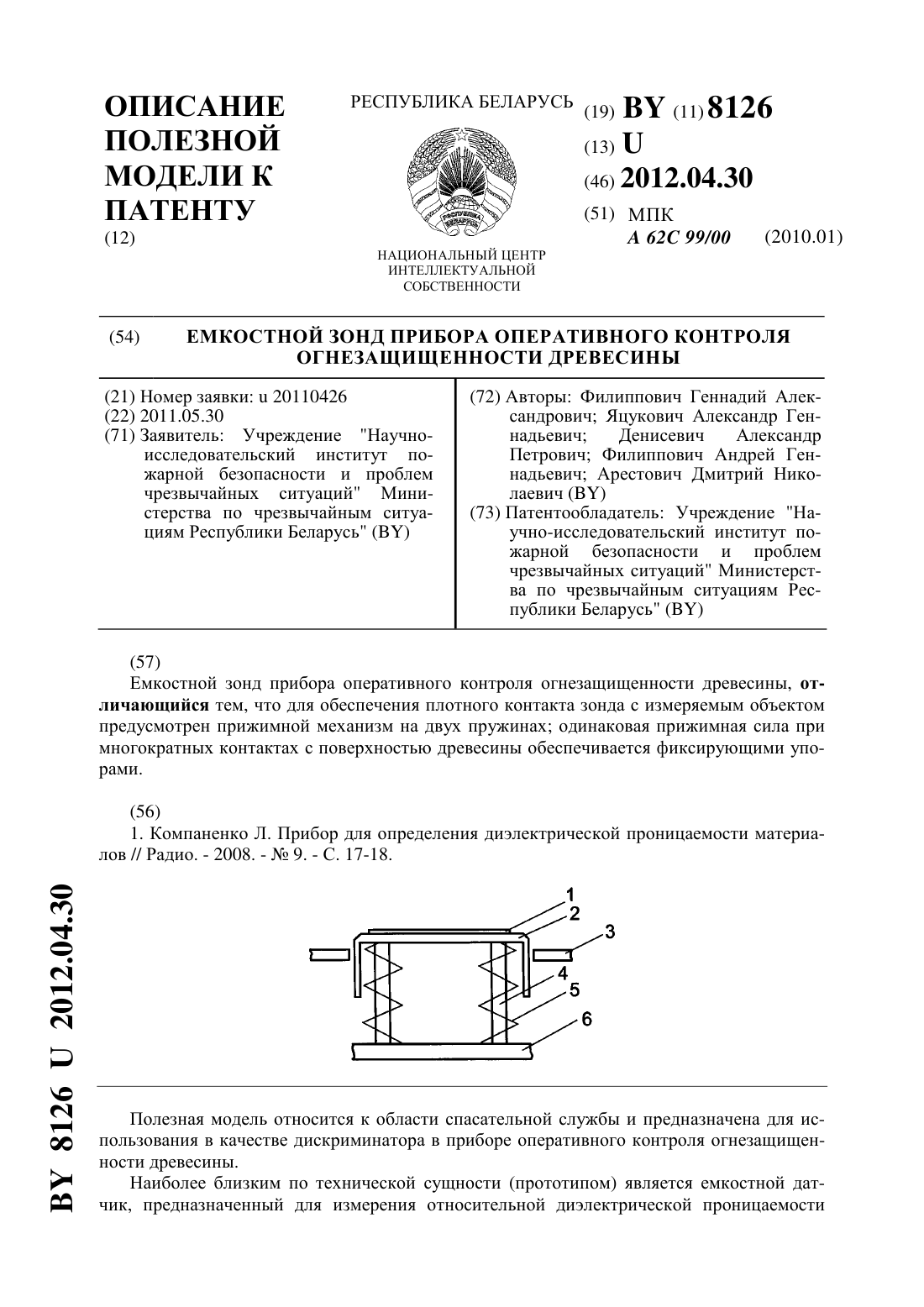
Емкостной зонд прибора оперативного контроля огнезащищенности древесины
Номер патента: U 8126
Опубликовано: 30.04.2012
Авторы: Денисевич Александр Петрович, Яцукович Александр Геннадьевич, Филиппович Андрей Геннадьевич, Арестович Дмитрий Николаевич, Филиппович Геннадий Александрович
МПК: A62C 99/00
Метки: емкостной, контроля, оперативного, зонд, прибора, древесины, огнезащищенности
Текст:
...расстоянием между зубьями гребенки, относительной диэлектрической проницаемостью стеклотекстолита и диэлектрической проницаемостью контактируемого с ним материала. Такой датчик имеет следующие недостатки датчик жестко закреплен на конструкции прибора, что не исключает перекоса датчика при контакте с измеряемым образцом результат измерения в такой конструкции в значительной степени зависит от прижимного усилия, что является особенно...
Предыдущий патент: Комбинированный однодисковый сошник для узкорядного посева
Следующий патент: Возбудитель вибрации гидравлического источника сейсмических сигналов
Случайный патент: Устройство лазерного спекания изделий из сферических порошковых материалов