Планетарный редуктор
Текст
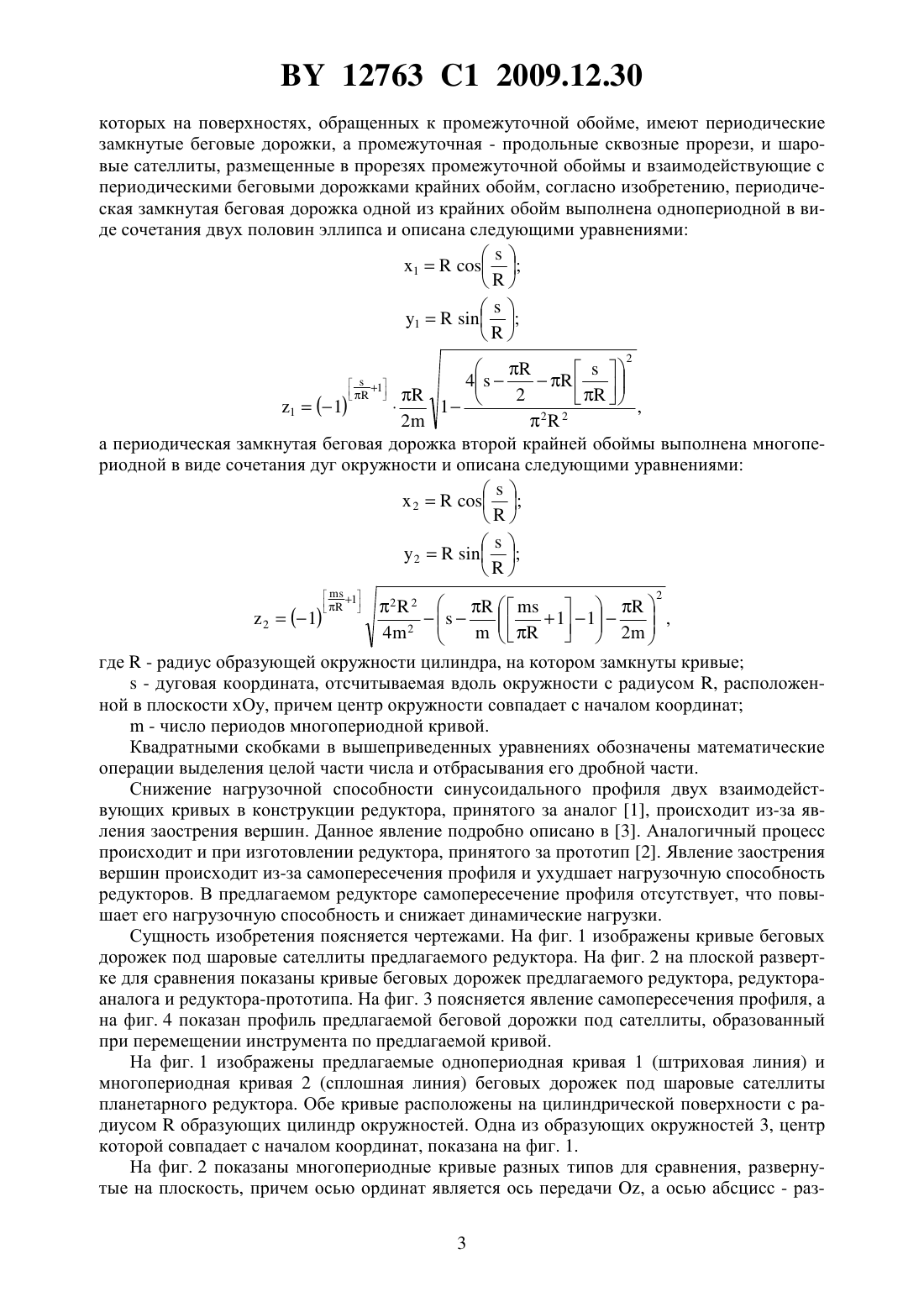
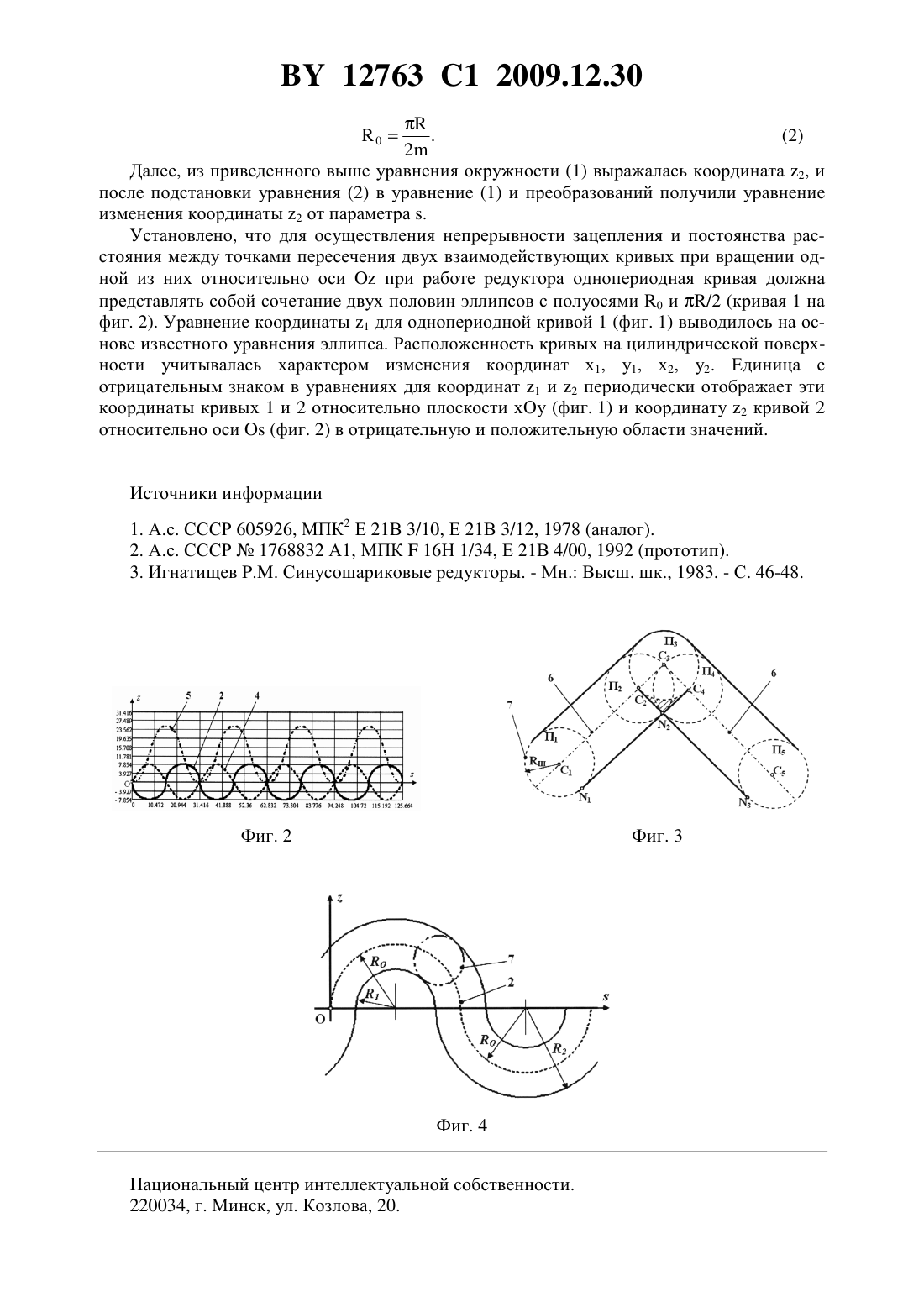
(71) Заявитель Лустенков Михаил Евгеньевич(72) Автор Лустенков Михаил Евгеньевич(73) Патентообладатель Лустенков Михаил Евгеньевич(57) Планетарный редуктор, содержащий корпус с ведущим и ведомым валами и коаксильно установленными обоймами, крайние из которых на поверхностях, обращенных к промежуточной обойме, имеют периодические замкнутые беговые дорожки, а промежуточная - продольные сквозные прорези, и шаровые сателлиты, размещенные в прорезях промежуточной обоймы и взаимодействующие с периодическими беговыми дорожками крайних обойм, отличающийся тем, что периодическая замкнутая беговая дорожка одной из крайних обойм выполнена однопериодной в виде сочетания двух половин эллипса и описана следующими уравнениями 12763 1 2009.12.30 а периодическая замкнутая беговая дорожка второй крайней обоймы выполнена многопериодной в виде сочетания дуг окружности и описана следующими уравнениями где- радиус образующей окружности цилиндра, на котором замкнуты кривые беговых дорожек- дуговая координата, отсчитываемая вдоль окружности с радиусом , расположенной в плоскости , причем центр окружности совпадает с началом координат- число периодов многопериодной кривой. Изобретение относится к машиностроению и может быть использовано в качестве редуктора в приводах различных механизмов. Известен планетарный редуктор для забойных двигателей, включающий ведомый вал с шаровыми сателлитами, ведущий вал и корпус с беговыми дорожками для шаровых сателлитов, причем, с целью увеличения передаваемого момента, беговые дорожки выполнены синусоидальными 1. На участках, прилегающих к вершинам кривых, шаровые сателлиты не передают нагрузку, что приводит к снижению нагрузочной способности редуктора. Также на этих участках возрастают динамические нагрузки в зацеплении из-за соударений сателлитов с беговыми дорожками. Наиболее близким к изобретению по технической сущности является планетарный редуктор для забойных двигателей 2, содержащий ведущий и ведомый валы, корпус, коаксильно установленные обоймы, крайние из которых на поверхностях, обращенных к промежуточной обойме, имеют периодические замкнутые дорожки, а промежуточная продольные сквозные прорези, и шаровые сателлиты, размещенные в прорезях промежуточной обоймы и взаимодействующие с периодическими дорожками крайних обойм, причем периодические замкнутые дорожки описаны уравнениямиу(- ),где-2 в интервале 2/(21)/2(1)- в интервале (21)/(22)/, ,- цилиндрические координаты точек кривой, у,- прямоугольные координаты точек кривой- число периодов кривой- порядковый номер периода,0, 1, 2 -1- коэффициент размаха кривой. При попадании шаровых сателлитов на участки кривых, прилегающих к вершинам,нарушается контакт шаровых сателлитов с беговыми дорожками, нагрузочная способность редуктора снижается, возникают удары, возрастает шум. Задачей изобретения является увеличение нагрузочной способности редуктора и снижение динамических нагрузок. Поставленная задача достигается тем, что в планетарном редукторе, содержащем корпус с ведущим и ведомым валами и коаксильно установленными обоймами, крайние из 12763 1 2009.12.30 которых на поверхностях, обращенных к промежуточной обойме, имеют периодические замкнутые беговые дорожки, а промежуточная - продольные сквозные прорези, и шаровые сателлиты, размещенные в прорезях промежуточной обоймы и взаимодействующие с периодическими беговыми дорожками крайних обойм, согласно изобретению, периодическая замкнутая беговая дорожка одной из крайних обойм выполнена однопериодной в виде сочетания двух половин эллипса и описана следующими уравнениями,2 2 2 а периодическая замкнутая беговая дорожка второй крайней обоймы выполнена многопериодной в виде сочетания дуг окружности и описана следующими уравнениями где- радиус образующей окружности цилиндра, на котором замкнуты кривые- дуговая координата, отсчитываемая вдоль окружности с радиусом , расположенной в плоскости хОу, причем центр окружности совпадает с началом координат- число периодов многопериодной кривой. Квадратными скобками в вышеприведенных уравнениях обозначены математические операции выделения целой части числа и отбрасывания его дробной части. Снижение нагрузочной способности синусоидального профиля двух взаимодействующих кривых в конструкции редуктора, принятого за аналог 1, происходит из-за явления заострения вершин. Данное явление подробно описано в 3. Аналогичный процесс происходит и при изготовлении редуктора, принятого за прототип 2. Явление заострения вершин происходит из-за самопересечения профиля и ухудшает нагрузочную способность редукторов. В предлагаемом редукторе самопересечение профиля отсутствует, что повышает его нагрузочную способность и снижает динамические нагрузки. Сущность изобретения поясняется чертежами. На фиг. 1 изображены кривые беговых дорожек под шаровые сателлиты предлагаемого редуктора. На фиг. 2 на плоской развертке для сравнения показаны кривые беговых дорожек предлагаемого редуктора, редукторааналога и редуктора-прототипа. На фиг. 3 поясняется явление самопересечения профиля, а на фиг. 4 показан профиль предлагаемой беговой дорожки под сателлиты, образованный при перемещении инструмента по предлагаемой кривой. На фиг. 1 изображены предлагаемые однопериодная кривая 1 (штриховая линия) и многопериодная кривая 2 (сплошная линия) беговых дорожек под шаровые сателлиты планетарного редуктора. Обе кривые расположены на цилиндрической поверхности с радиусомобразующих цилиндр окружностей. Одна из образующих окружностей 3, центр которой совпадает с началом координат, показана на фиг. 1. На фиг. 2 показаны многопериодные кривые разных типов для сравнения, развернутые на плоскость, причем осью ординат является ось передачи , а осью абсцисс - раз 3 12763 1 2009.12.30 вернутая в линию окружность 3 (фиг. 1), вдоль которой происходит отсчет дуговой координаты . Предлагаемая многопериодная кривая 2 (фиг. 2, сплошная линия) состоит из сопряженных дуг окружностей, кривая 4 (штриховая линия) является синусоидальной кривой 1, кривая 5 (штрихпунктирная линия) состоит из сопряженных участков циклоиды и описывается уравнениями, приведенными в 2, причем, согласно этим уравнениям 2, колебания кривой происходят не относительно оси абсцисс, а относительно некоторой оси, расположенной выше оси . Все три кривые (фиг. 2) для корректности сравнения имеют одинаковые параметры число периодов 4, радиус образующей цилиндр окружности 20 мм. Параметр, характеризующий амплитуду колебаний для всех трех кривых определялся как/(2)7,854 мм. Рассмотрим преимущества предлагаемой многопериодной кривой. На фиг. 3 схематично изображен участок многопериодной кривой 6 (штрихпунктирная линия), состоящий из двух ветвей С 1 С 3 и С 3 С 5 с вершиной в точке С 3, развернутый на плоскость. При изготовлении беговой дорожки на поверхностях крайних обойм планетарного редуктора,центр режущего инструмента 7, имеющего круглый профиль с радиусом, равным радиусу шарового сателлита Ш, перемещается по кривой 6. При этом он последовательно занимает ряд положений, в том числе положения П 1, П 2, П 3, П 4, П 5, и формирует беговую дорожку, показанную на фиг. 3 сплошной жирной линией. Когда центр инструмента пройдет расстояние С 1 С 3 и окажется в вершинной точке С 3, он сформирует нижнюю часть профиля беговой дорожки 14. При дальнейшем прохождении центра инструмента по участку кривой С 3 С 5 формируется профиль 23. Таким образом происходит пересечение профиля- пересечение отрезков 14 и 23 в точке 2. Фактически образуемый инструментом профиль будет представлять кривую 123 с вершиной в точке 2. Инструмент 7, формируя профиль беговой дорожки, воспроизводит последующее движение шарового сателлита по этой беговой дорожке. При движении шарового сателлита на участках С 1 С 2 и С 4 С 5 его контакт с беговой дорожкой будет двусторонний. На участке С 2 С 3 С 5 между шаровым сателлитом и беговой дорожкой образуется зазор, площадь которого 224 на фиг. 3 ограничена дугой окружности и отрезками прямых. На фиг. 3 эта площадь заштрихована. Это приводит к снижению нагрузочной способности передачи,возникновению вибраций и ударов. Величина самопересечения профиля зависит от угла подъема кривых и определяется,в свою очередь, числом периодов , радиусоми амплитудой кривой. Как правило, самопересечение профиля происходит с кривыми, у которых 1. У синусоидальных кривых 1 наличие самопересечения профиля доказано в 3. На фиг. 3 видно, что у кривой 5 редуктора-прототипа 2, при прочих равных условиях, угол подъема изменяется еще резче, чем у синусоидальной кривой 4, вершины кривой 5 более заострены. Это свидетельствует о наличии самопересечения профиля и у кривой 5 редуктора-прототипа. В предлагаемом редукторе многопериодная кривая представляет собой сочетание дуг окружностей с радиусом Ш. На фиг. 4 показан профиль беговой дорожки, образованной при движении центра инструмента 7 с круглым профилем по кривой 2. Образуемый профиль беговой дорожки будет получен сопряжением дуг окружностей с радиусами 10 Ш и 20 Ш. Данный профиль беговой дорожки не имеет самопересечений, поэтому шаровому сателлиту на всех участках обеспечен двусторонний контакт с беговой дорожкой, что повышает нагрузочную способность планетарного редуктора, исключает удары и тем самым снижает динамические нагрузки. Вывод уравнения многопериодной кривой на плоской развертке осуществлялся на основе уравнения окружности 22220,(1) где 0 - радиус сопряженных дуг окружностей, выполняющий функцию амплитуды кривой (фиг. 4). Радиус 0 зависит от числа периодови радиуса(2) 2 Далее, из приведенного выше уравнения окружности (1) выражалась координата 2, и после подстановки уравнения (2) в уравнение (1) и преобразований получили уравнение изменения координаты 2 от параметра . Установлено, что для осуществления непрерывности зацепления и постоянства расстояния между точками пересечения двух взаимодействующих кривых при вращении одной из них относительно осипри работе редуктора однопериодная кривая должна представлять собой сочетание двух половин эллипсов с полуосями 0 и /2 (кривая 1 на фиг. 2). Уравнение координаты 1 для однопериодной кривой 1 (фиг. 1) выводилось на основе известного уравнения эллипса. Расположенность кривых на цилиндрической поверхности учитывалась характером изменения координат х 1, у 1, х 2, у 2. Единица с отрицательным знаком в уравнениях для координат 1 и 2 периодически отображает эти координаты кривых 1 и 2 относительно плоскости хОу (фиг. 1) и координату 2 кривой 2 относительно оси(фиг. 2) в отрицательную и положительную области значений. 0 Фиг. 4 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: F16H 25/22
Метки: планетарный, редуктор
Код ссылки
<a href="https://by.patents.su/5-12763-planetarnyjj-reduktor.html" rel="bookmark" title="База патентов Беларуси">Планетарный редуктор</a>
Планетарный редуктор
Номер патента: 5401
Опубликовано: 30.09.2003
Авторы: Пашкевич Александр Михайлович, Пашкевич Михаил Фёдорович
МПК: F16H 25/06, F16H 13/08
Метки: редуктор, планетарный
Текст:
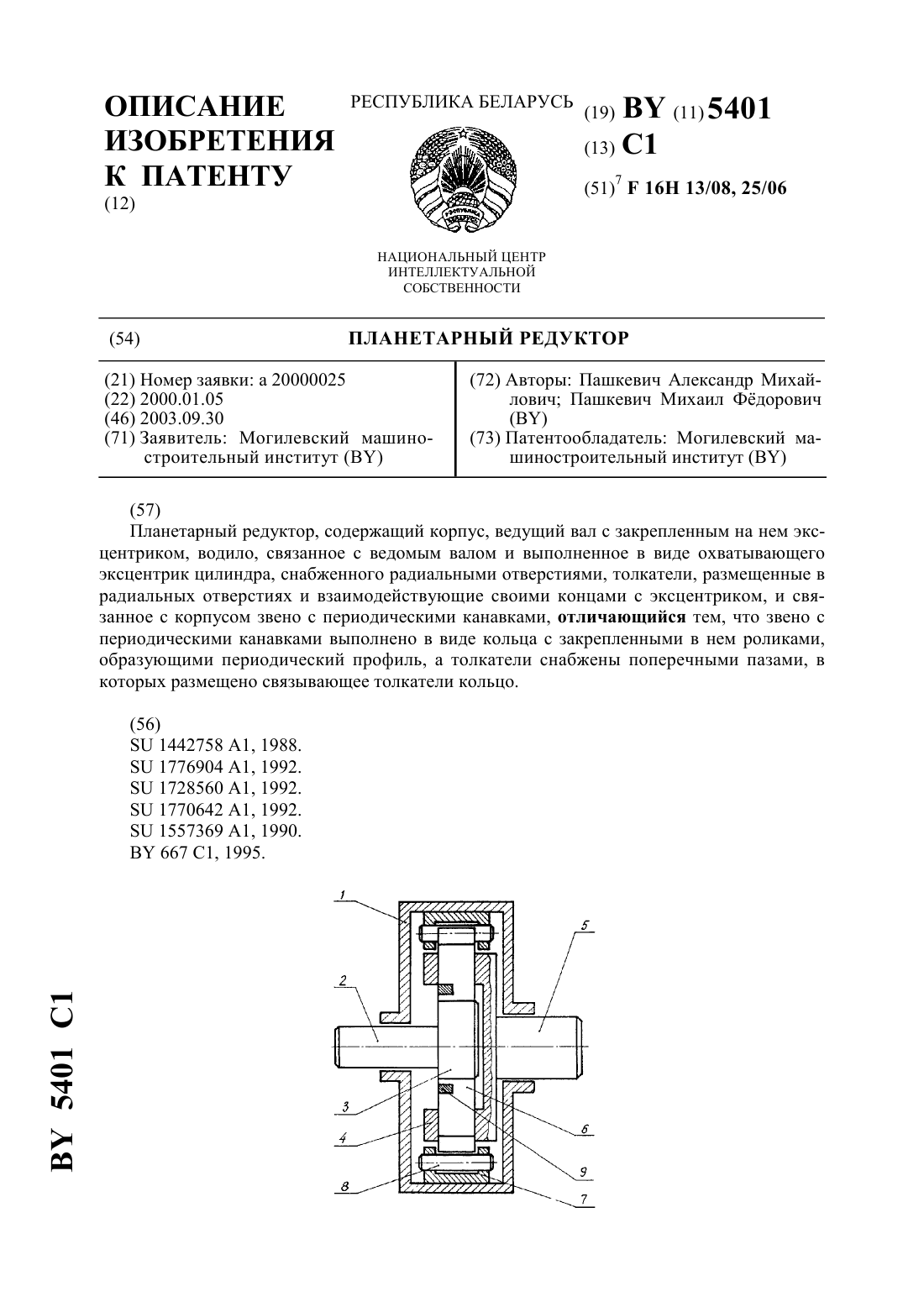
...материалоемкости и трудоемкости изготовления редуктора. Решение этой задачи достигается тем, что в планетарном редукторе, содержащем корпус,ведущий вал с закрепленным на нем эксцентриком, водило, связанное с ведомым валом и выполненное в виде охватывающего эксцентрик полого цилиндра, снабженного радиальными отверстиями, толкатели, размещенные в радиальных отверстиях и взаимодействующие своими концами с эксцентриком, и связанное с корпусом...
Планетарный цевочный редуктор
Номер патента: 1096
Опубликовано: 14.03.1996
Авторы: Берестнев Олег Васильевич, Янкевич Николай Григорьевич, Янкевич Наталья Степановна, Кравчук Александр Степанович
МПК: F16H 1/32
Метки: планетарный, редуктор, цевочный
Текст:
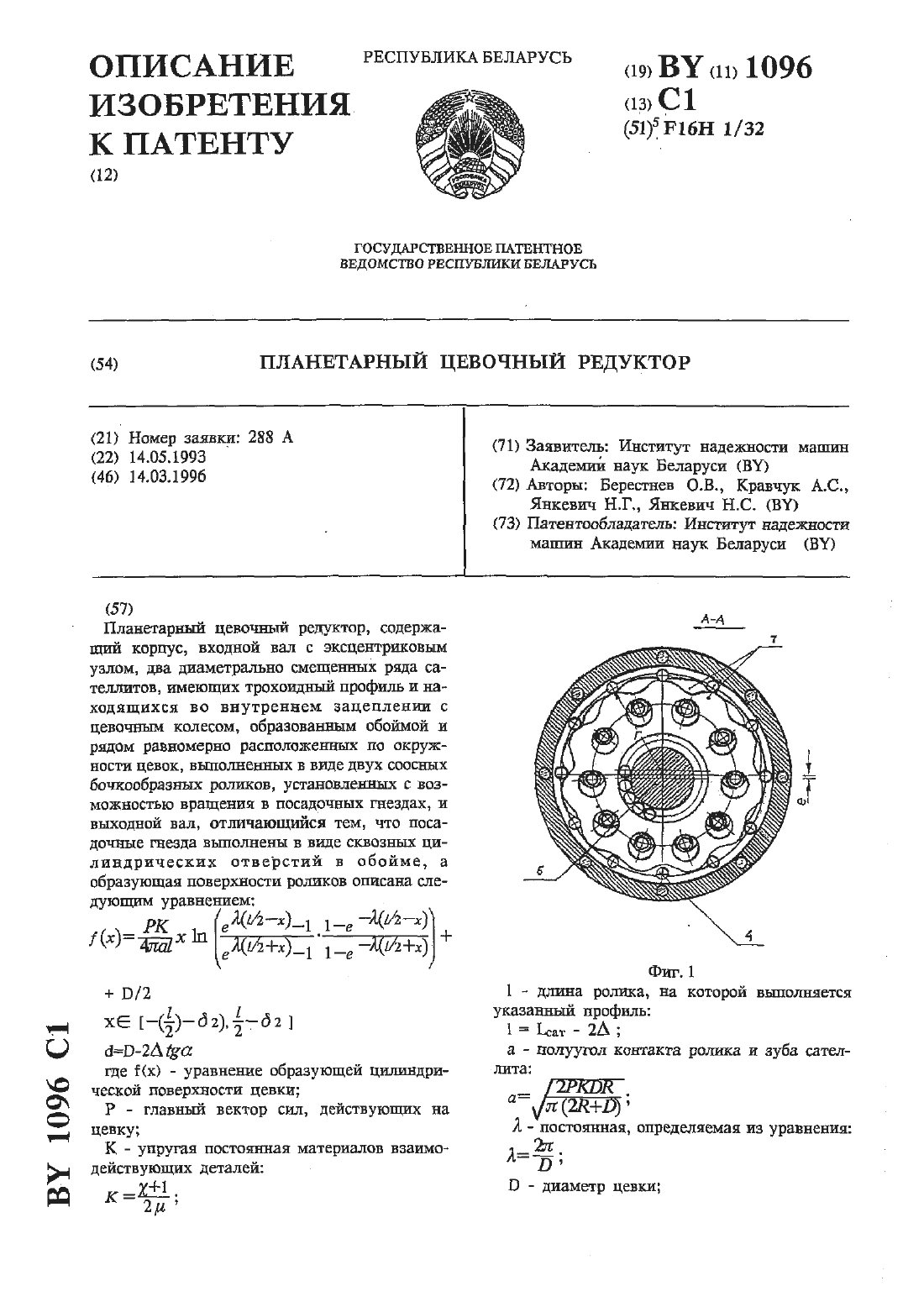
...решается в ПЦР, содержащем корпус, входной вал с эксцентриковым узлом, два диаметрально смещенные ряда сателлитов, имеющих трохоидный профиль и наХОДЯЩИХСЯ ВО ВНУТРЕННЕМ зацеплении С цевочным колесом, образованным обоймой и рядом равномерно расположенных по окружности цевок, выполненных в виде двух соосных бочкообразньш ролшсов, установленных с возможностью вращения в посадочных гнездах, и выходной вал, посадочные гнезда вьшолнены в виде...
Планетарный редуктор управления валом отбора мощности транспортного средства
Номер патента: U 1546
Опубликовано: 30.09.2004
Авторы: Дакимович Василий Васильевич, Крупец Леонид Николаевич, Матюшкин Александр Михайлович, Сапельников Виктор Георгиевич, Жук Василий Владимирович, Усс Иван Никодимович, Мелешко Михаил Григорьевич
МПК: B60K 17/28
Метки: управления, средства, отбора, редуктор, планетарный, транспортного, валом, мощности
Текст:
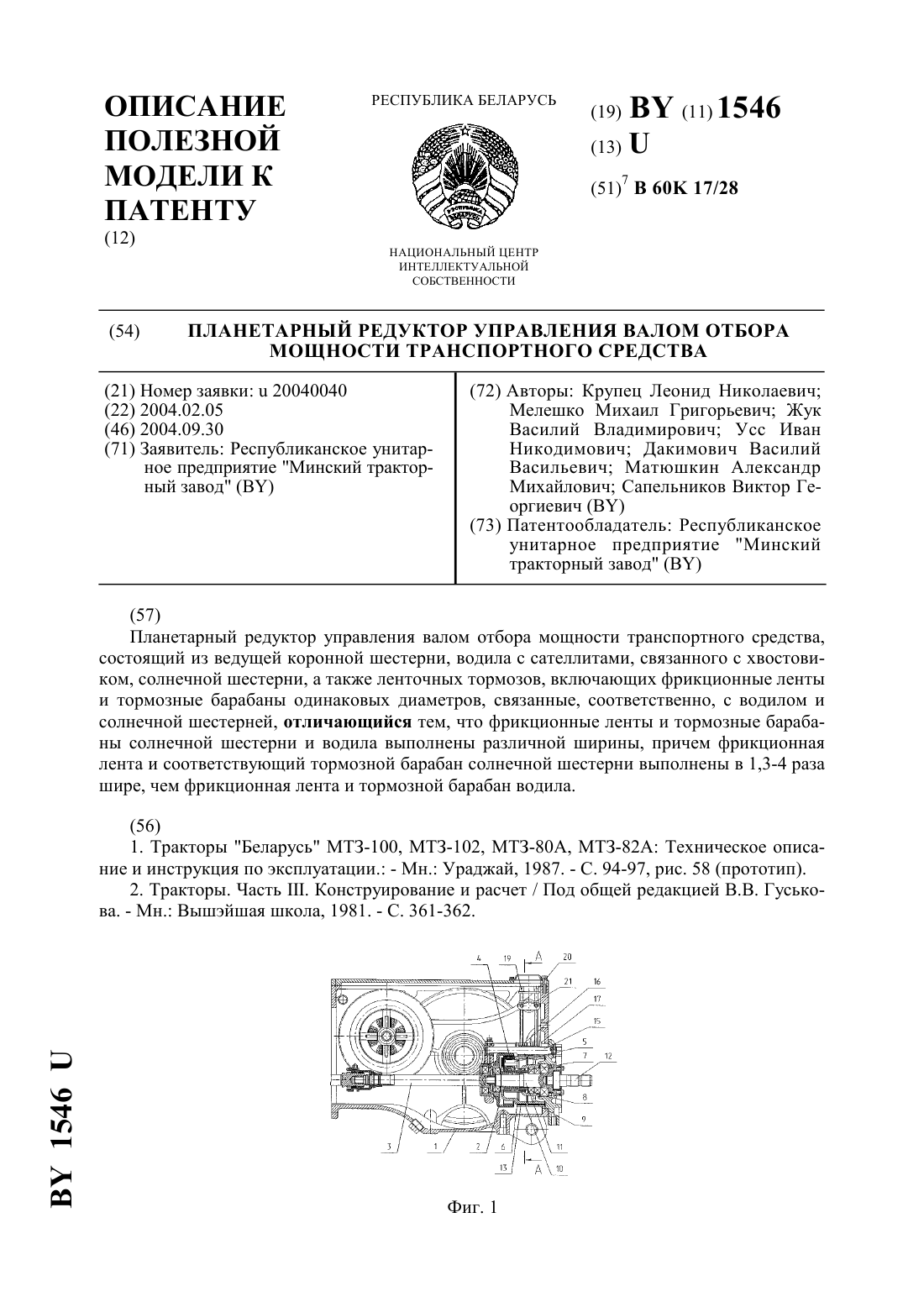
...задачей, на решение которой направлена предлагаемая полезная модель,является устранение описанных недостатков, а именно создание планетарного редуктора управления валом отбора мощности с ленточными тормозами включения и отключения одинаковой долговечности и, за счет этого, повышение надежности и снижение трудоемкости технического обслуживания путем увеличения срока между регулировками тормозов. Поставленная техническая задача достигается...
Волновой редуктор
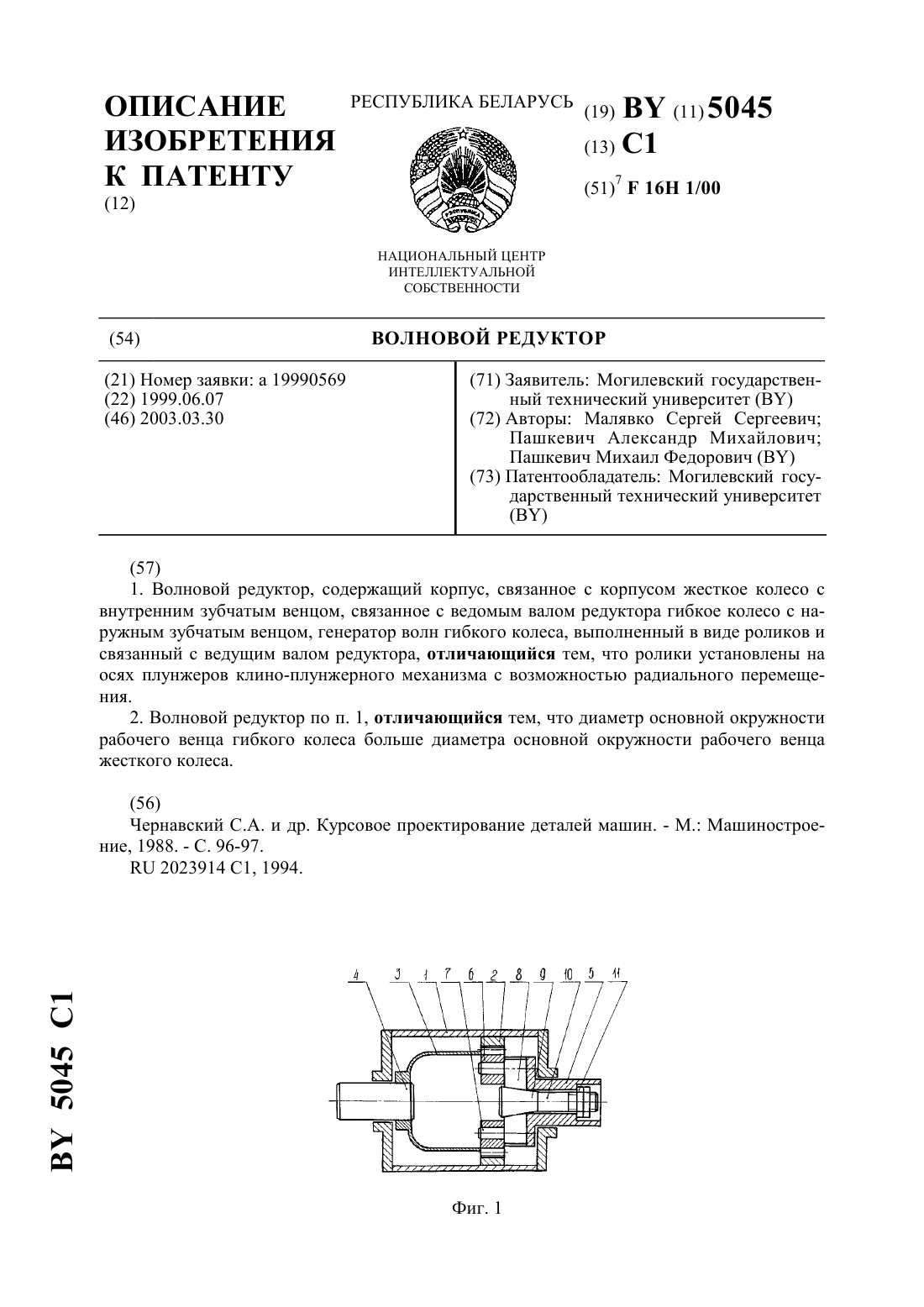
Номер патента: 5045
Опубликовано: 30.03.2003
Авторы: Пашкевич Александр Михайлович, Пашкевич Михаил Федорович, Малявко Сергей Сергеевич
МПК: F16H 1/00
Текст:
...генерации волн гибкого колеса. Так, если в прототипе две волны колеса генерируются путем посадки гибкого зубчатого венца этого колеса на ролики, положение которых не может меняться, то в предлагаемом волновом редукторе две волны гибкого колеса 3 образуются при радиальном перемещении роликов 6, которые установлены на осях 7 плунжеров 8 клино-плунжерного механизма. При завинчивании гаек 11 клин 9 перемещается вправо и своими скосами воздействует...
Синусошариковый редуктор
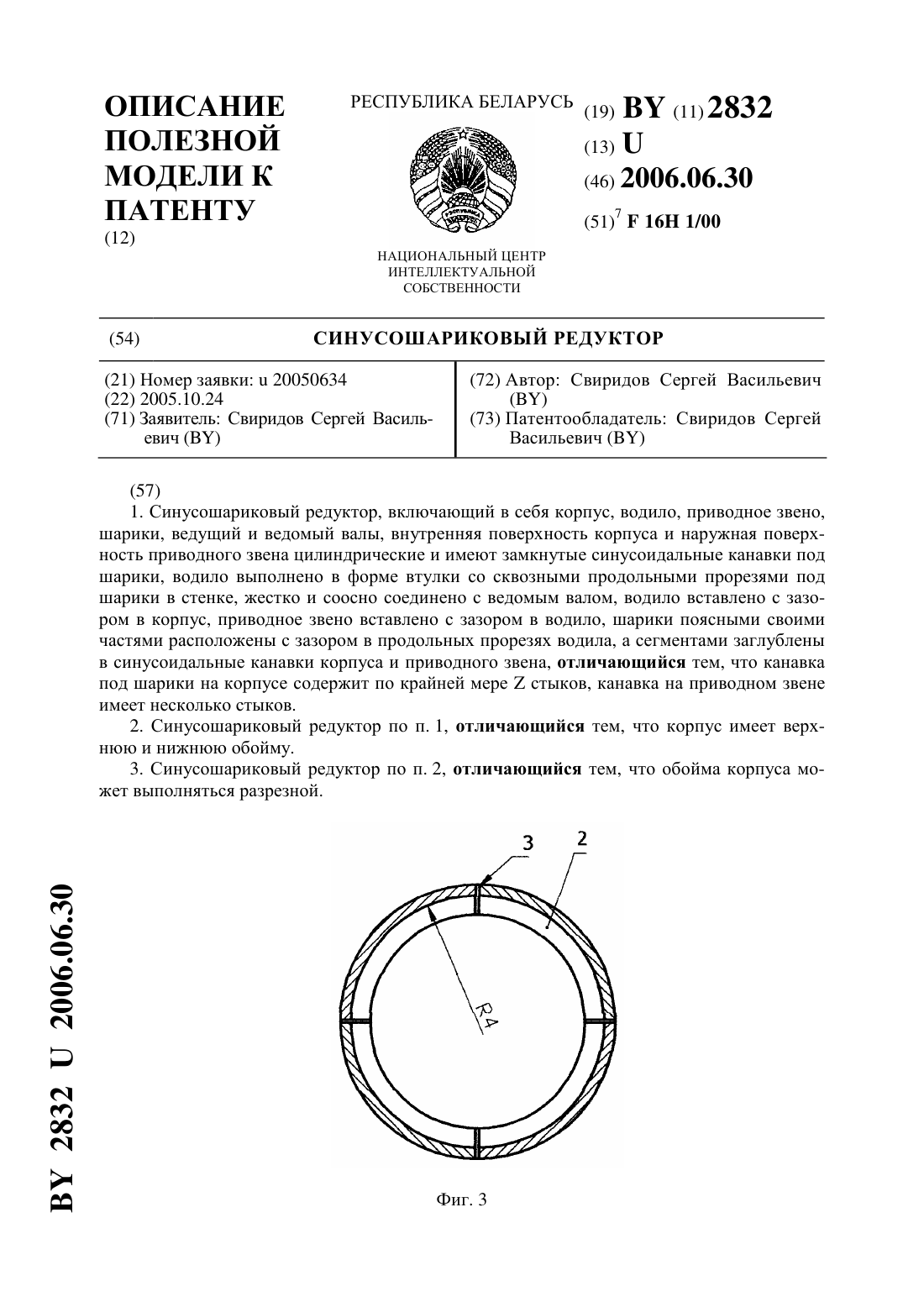
Номер патента: U 2832
Опубликовано: 30.06.2006
Автор: Свиридов Сергей Васильевич
МПК: F16H 1/00
Метки: редуктор, синусошариковый
Текст:
...при серийном и массовом производстве, что приведет к удешевлению данного вида зацепления и продукции создаваемой на ее основе. Решение указанных задач обеспечивается тем, что синусошариковый редуктор, включающий в себя корпус, водило, приводное звено, шарики, ведущий и ведомый валы, внутренняя поверхность корпуса и наружная поверхность приводного звена цилиндрические и имеют замкнутые синусоидальные канавки под шарики, водило выполнено...
Предыдущий патент: Способ медикаментозного лечения перитуморального отека головного мозга
Следующий патент: Способ термической обработки металла в колодце
Случайный патент: Инструмент для закрепления линз в виде отрицательного мениска при двусторонней обработке