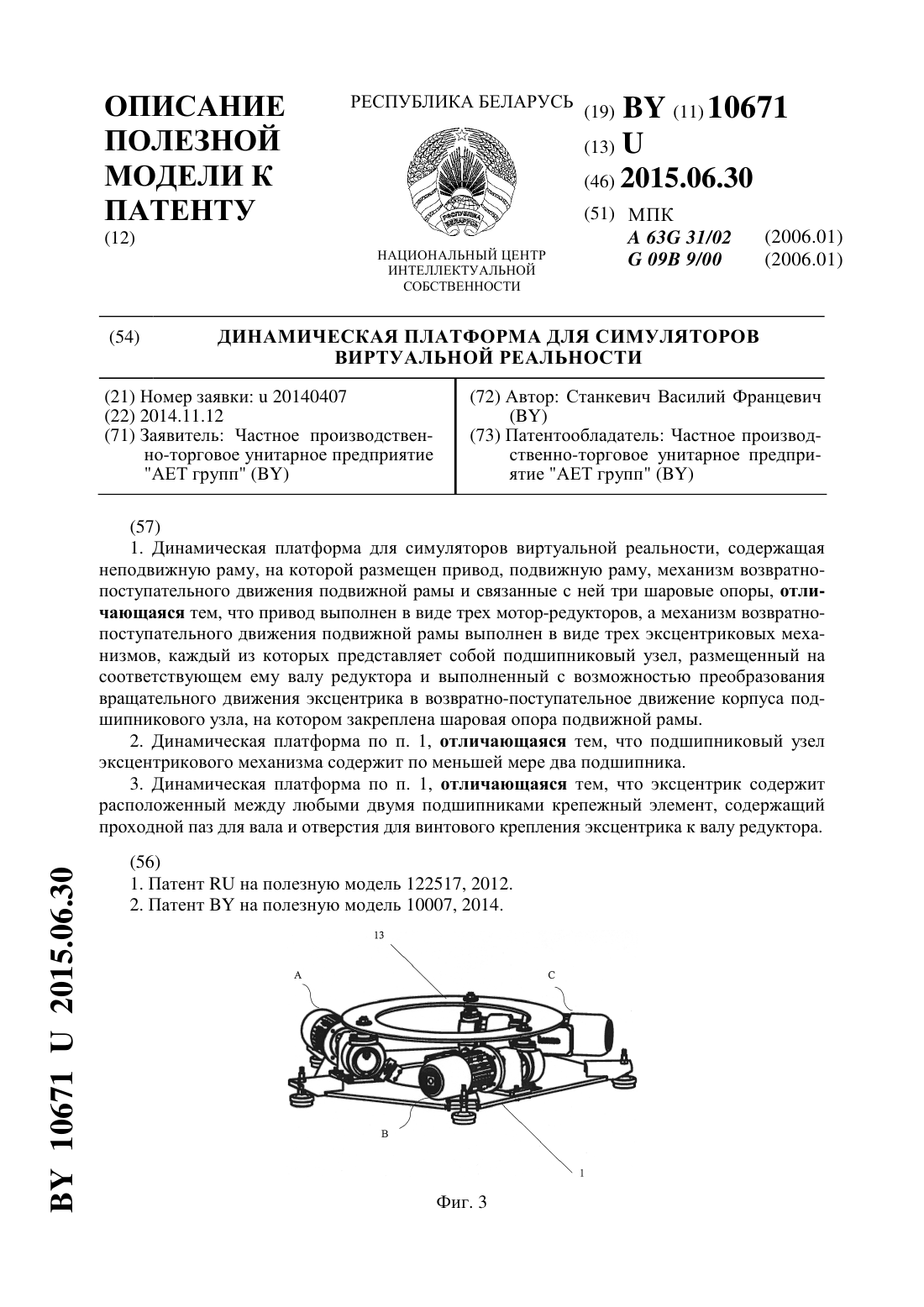
Динамическая платформа для симуляторов виртуальной реальности
Формула / Реферат
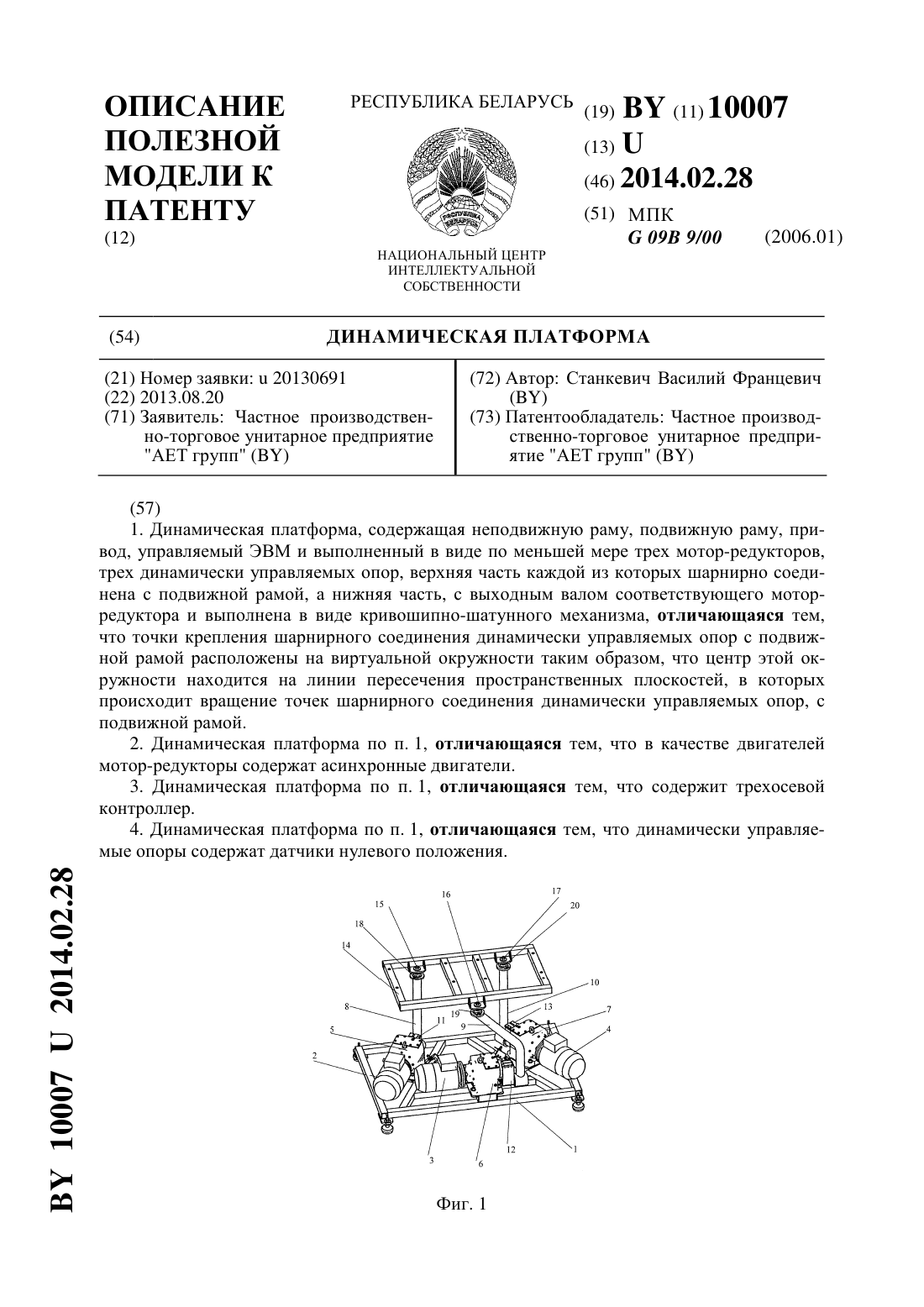
1. Динамическая платформа для симуляторов виртуальной реальности содержащая неподвижную раму, на которой размещен привод, подвижную раму, механизм возвратно поступательного движения подвижной рамы и связанные с ней три шаровые опоры, отличающаяся тем, что привод выполнен в виде трех мотор-редукторов, а механизм возвратно поступательного движения подвижной рамы выполнен в виде трех эксцентриковых механизмов, каждый из которых представляет собой подшипниковый узел, размещенный на соответствующем ему валу редуктора и выполненный с возможностью преобразования вращательного движения эксцентрика в возвратно поступательное движение корпуса подшипникового узла на котором закреплена шаровая опора подвижной рамы. 2. Динамическая платформа по пункту 1, отличающаяся тем, что подшипниковый узел эксцентрикового механизма содержит, по меньшей мере, два подшипника. 3. Динамическая платформа по пункту 1, отличающаяся тем, что эксцентрик содержит, расположенный между любыми двумя подшипниками, крепежный элемент, содержащий проходной паз для вала и отверстия для винтового крепления эксцентрика к валу редуктора.
Текст
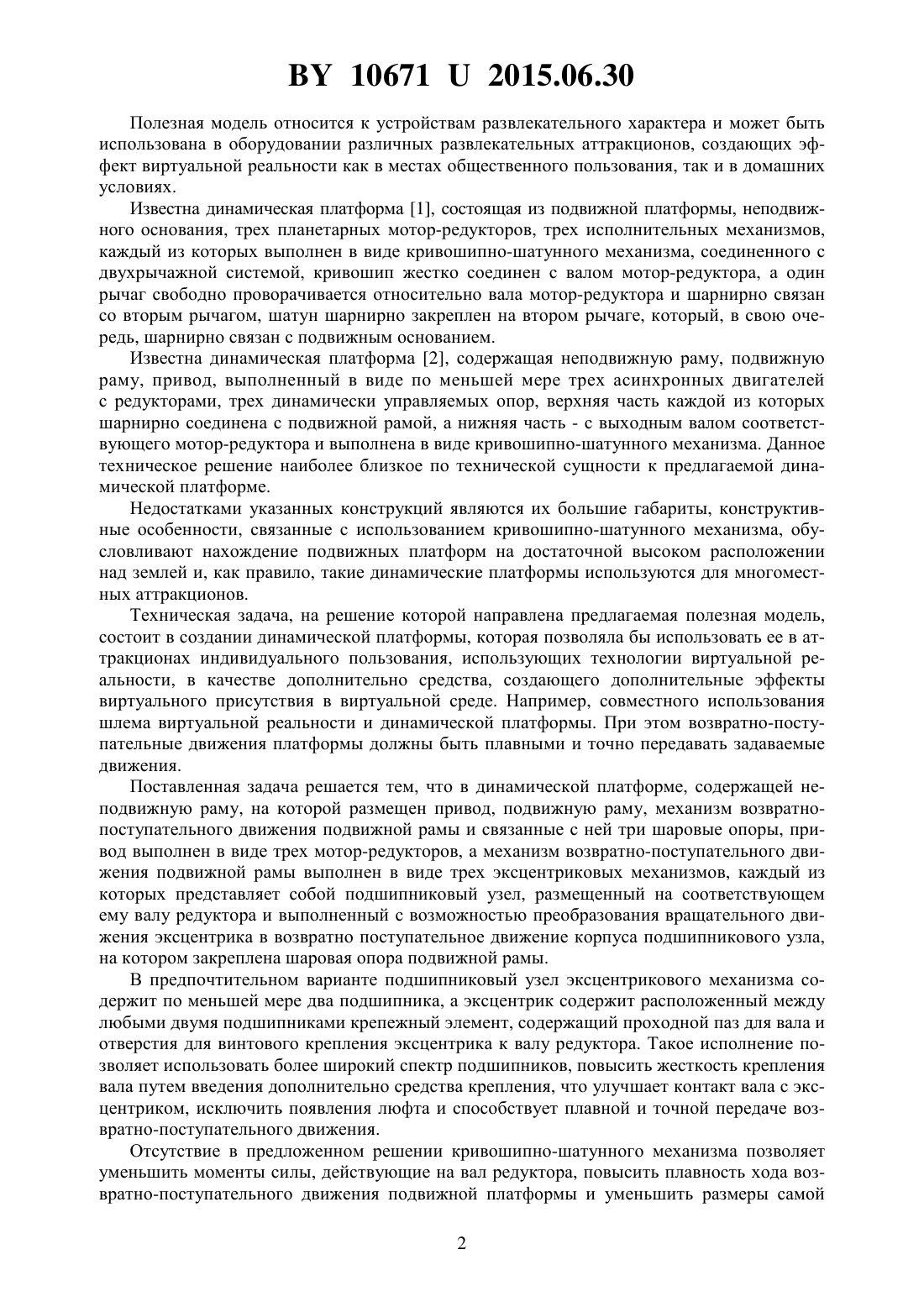
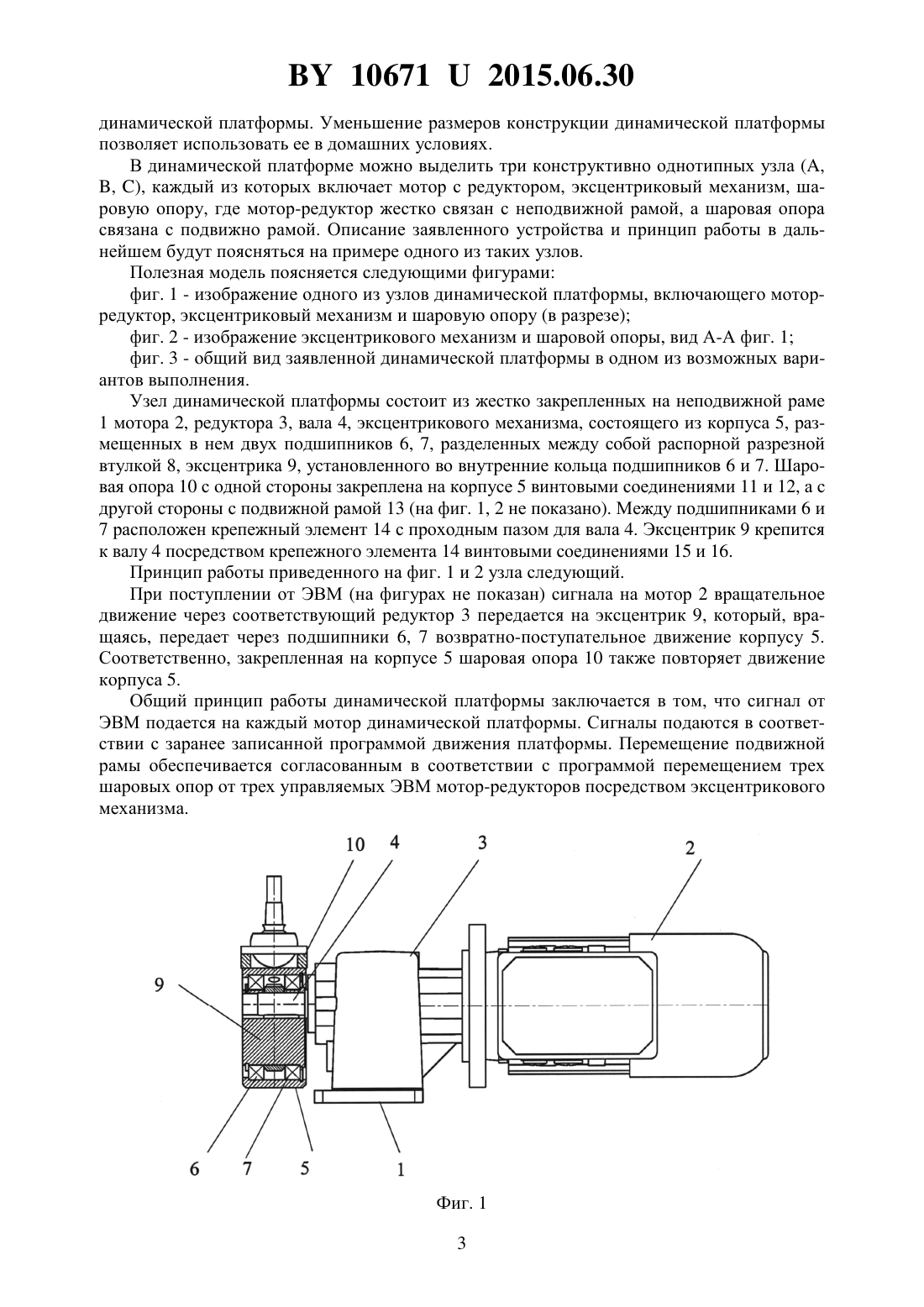
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ДИНАМИЧЕСКАЯ ПЛАТФОРМА ДЛЯ СИМУЛЯТОРОВ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ(71) Заявитель Частное производственно-торговое унитарное предприятие АЕТ групп(72) Автор Станкевич Василий Францевич(73) Патентообладатель Частное производственно-торговое унитарное предприятие АЕТ групп(57) 1. Динамическая платформа для симуляторов виртуальной реальности, содержащая неподвижную раму, на которой размещен привод, подвижную раму, механизм возвратнопоступательного движения подвижной рамы и связанные с ней три шаровые опоры, отличающаяся тем, что привод выполнен в виде трех мотор-редукторов, а механизм возвратнопоступательного движения подвижной рамы выполнен в виде трех эксцентриковых механизмов, каждый из которых представляет собой подшипниковый узел, размещенный на соответствующем ему валу редуктора и выполненный с возможностью преобразования вращательного движения эксцентрика в возвратно-поступательное движение корпуса подшипникового узла, на котором закреплена шаровая опора подвижной рамы. 2. Динамическая платформа по п. 1, отличающаяся тем, что подшипниковый узел эксцентрикового механизма содержит по меньшей мере два подшипника. 3. Динамическая платформа по п. 1, отличающаяся тем, что эксцентрик содержит расположенный между любыми двумя подшипниками крепежный элемент, содержащий проходной паз для вала и отверстия для винтового крепления эксцентрика к валу редуктора.(56) 1. Патентна полезную модель 122517, 2012. 2. Патентна полезную модель 10007, 2014. 106712015.06.30 Полезная модель относится к устройствам развлекательного характера и может быть использована в оборудовании различных развлекательных аттракционов, создающих эффект виртуальной реальности как в местах общественного пользования, так и в домашних условиях. Известна динамическая платформа 1, состоящая из подвижной платформы, неподвижного основания, трех планетарных мотор-редукторов, трех исполнительных механизмов,каждый из которых выполнен в виде кривошипно-шатунного механизма, соединенного с двухрычажной системой, кривошип жестко соединен с валом мотор-редуктора, а один рычаг свободно проворачивается относительно вала мотор-редуктора и шарнирно связан со вторым рычагом, шатун шарнирно закреплен на втором рычаге, который, в свою очередь, шарнирно связан с подвижным основанием. Известна динамическая платформа 2, содержащая неподвижную раму, подвижную раму, привод, выполненный в виде по меньшей мере трех асинхронных двигателей с редукторами, трех динамически управляемых опор, верхняя часть каждой из которых шарнирно соединена с подвижной рамой, а нижняя часть - с выходным валом соответствующего мотор-редуктора и выполнена в виде кривошипно-шатунного механизма. Данное техническое решение наиболее близкое по технической сущности к предлагаемой динамической платформе. Недостатками указанных конструкций являются их большие габариты, конструктивные особенности, связанные с использованием кривошипно-шатунного механизма, обусловливают нахождение подвижных платформ на достаточной высоком расположении над землей и, как правило, такие динамические платформы используются для многоместных аттракционов. Техническая задача, на решение которой направлена предлагаемая полезная модель,состоит в создании динамической платформы, которая позволяла бы использовать ее в аттракционах индивидуального пользования, использующих технологии виртуальной реальности, в качестве дополнительно средства, создающего дополнительные эффекты виртуального присутствия в виртуальной среде. Например, совместного использования шлема виртуальной реальности и динамической платформы. При этом возвратно-поступательные движения платформы должны быть плавными и точно передавать задаваемые движения. Поставленная задача решается тем, что в динамической платформе, содержащей неподвижную раму, на которой размещен привод, подвижную раму, механизм возвратнопоступательного движения подвижной рамы и связанные с ней три шаровые опоры, привод выполнен в виде трех мотор-редукторов, а механизм возвратно-поступательного движения подвижной рамы выполнен в виде трех эксцентриковых механизмов, каждый из которых представляет собой подшипниковый узел, размещенный на соответствующем ему валу редуктора и выполненный с возможностью преобразования вращательного движения эксцентрика в возвратно поступательное движение корпуса подшипникового узла,на котором закреплена шаровая опора подвижной рамы. В предпочтительном варианте подшипниковый узел эксцентрикового механизма содержит по меньшей мере два подшипника, а эксцентрик содержит расположенный между любыми двумя подшипниками крепежный элемент, содержащий проходной паз для вала и отверстия для винтового крепления эксцентрика к валу редуктора. Такое исполнение позволяет использовать более широкий спектр подшипников, повысить жесткость крепления вала путем введения дополнительно средства крепления, что улучшает контакт вала с эксцентриком, исключить появления люфта и способствует плавной и точной передаче возвратно-поступательного движения. Отсутствие в предложенном решении кривошипно-шатунного механизма позволяет уменьшить моменты силы, действующие на вал редуктора, повысить плавность хода возвратно-поступательного движения подвижной платформы и уменьшить размеры самой 2 106712015.06.30 динамической платформы. Уменьшение размеров конструкции динамической платформы позволяет использовать ее в домашних условиях. В динамической платформе можно выделить три конструктивно однотипных узла ( ), каждый из которых включает мотор с редуктором, эксцентриковый механизм, шаровую опору, где мотор-редуктор жестко связан с неподвижной рамой, а шаровая опора связана с подвижно рамой. Описание заявленного устройства и принцип работы в дальнейшем будут поясняться на примере одного из таких узлов. Полезная модель поясняется следующими фигурами фиг. 1 - изображение одного из узлов динамической платформы, включающего моторредуктор, эксцентриковый механизм и шаровую опору (в разрезе) фиг. 2 - изображение эксцентрикового механизм и шаровой опоры, вид А-А фиг. 1 фиг. 3 - общий вид заявленной динамической платформы в одном из возможных вариантов выполнения. Узел динамической платформы состоит из жестко закрепленных на неподвижной раме 1 мотора 2, редуктора 3, вала 4, эксцентрикового механизма, состоящего из корпуса 5, размещенных в нем двух подшипников 6, 7, разделенных между собой распорной разрезной втулкой 8, эксцентрика 9, установленного во внутренние кольца подшипников 6 и 7. Шаровая опора 10 с одной стороны закреплена на корпусе 5 винтовыми соединениями 11 и 12, а с другой стороны с подвижной рамой 13 (на фиг. 1, 2 не показано). Между подшипниками 6 и 7 расположен крепежный элемент 14 с проходным пазом для вала 4. Эксцентрик 9 крепится к валу 4 посредством крепежного элемента 14 винтовыми соединениями 15 и 16. Принцип работы приведенного на фиг. 1 и 2 узла следующий. При поступлении от ЭВМ (на фигурах не показан) сигнала на мотор 2 вращательное движение через соответствующий редуктор 3 передается на эксцентрик 9, который, вращаясь, передает через подшипники 6, 7 возвратно-поступательное движение корпусу 5. Соответственно, закрепленная на корпусе 5 шаровая опора 10 также повторяет движение корпуса 5. Общий принцип работы динамической платформы заключается в том, что сигнал от ЭВМ подается на каждый мотор динамической платформы. Сигналы подаются в соответствии с заранее записанной программой движения платформы. Перемещение подвижной рамы обеспечивается согласованным в соответствии с программой перемещением трех шаровых опор от трех управляемых ЭВМ мотор-редукторов посредством эксцентрикового механизма. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: G09B 9/00, A63G 31/02
Метки: динамическая, виртуальной, симуляторов, реальности, платформа
Код ссылки
<a href="https://by.patents.su/4-u10671-dinamicheskaya-platforma-dlya-simulyatorov-virtualnojj-realnosti.html" rel="bookmark" title="База патентов Беларуси">Динамическая платформа для симуляторов виртуальной реальности</a>
Динамическая платформа
Номер патента: U 10007
Опубликовано: 28.02.2014
Автор: Станкевич Василий Францевич
МПК: G09B 9/00
Метки: платформа, динамическая
Текст:
...моторредуктора и шарнирно связан со вторым рычагом, шатун шарнирно закреплен на втором рычаге, который в свою очередь шарнирно связан с подвижным основанием. Техническая задача, на решение которой направлена предлагаемая полезная модель,состоит в улучшении динамических свойств и повышении надежности и устойчивости динамической платформы. Динамическая платформа, содержащая неподвижную раму, подвижную раму, привод,управляемый ЭВМ и выполненный в...
Платформа автоматизированной парковки
Номер патента: U 10013
Опубликовано: 30.04.2014
Авторы: Сотников Владимир Иванович, Тюков Анатолий Владимирович, Дондик Сергей Александрович, Чернов Николай Григорьевич, Подымако Максим Эдуардович, Коваленко Максим Васильевич, Будник Василий Григорьевич
МПК: E04H 6/14
Метки: платформа, автоматизированной, парковки
Текст:
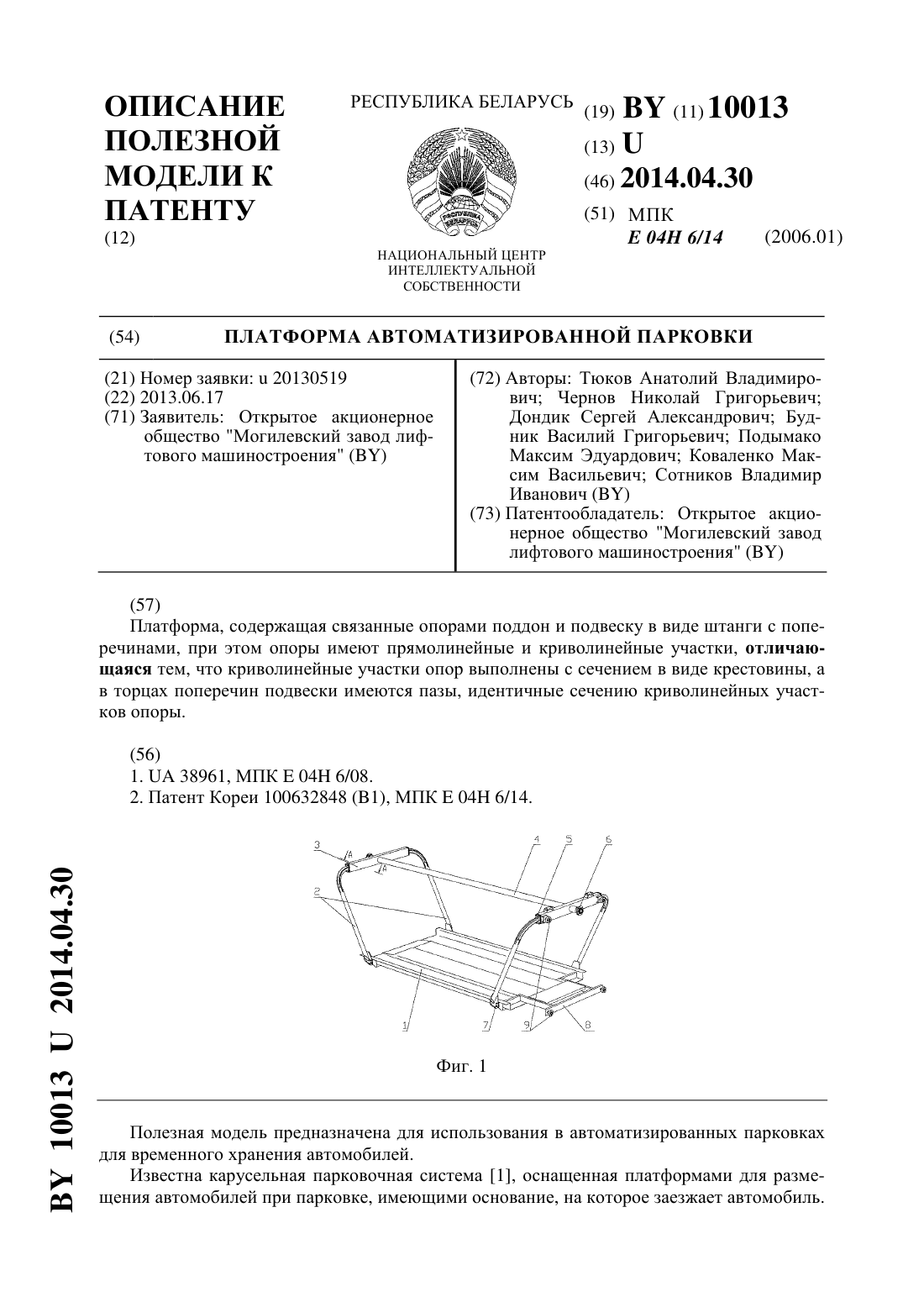
...поперечин подвески имеются пазы,идентичные сечению криволинейных участков опоры. Полезная модель поясняется фигурами, где на фиг. 1 показан общий вид платформы на фиг. 2 - разрез А-А на фиг. 1 на фиг. 3 - опора, общий вид. Платформа состоит из поддона 1, связанного четырьмя опорами 2 с подвеской, состоящей из двух поперечин 3, скрепленных между собой штангой 4. Каждая из опор 2 состоит из прямолинейного участка, выполненного из труб...
Железнодорожная платформа для крупнотоннажных грузов

Номер патента: U 4767
Опубликовано: 30.10.2008
Авторы: Момот Сергей Иванович, Гончаренко Игорь Владиславович, Масликов Юрий Валентинович
МПК: B61D 3/00
Метки: крупнотоннажных, платформа, железнодорожная, грузов
Текст:
...Выполнение устройства фиксации таким, что содержит, по меньшей мере, один штырь в ложементе каждого торцевого узла для соединения с балкой посредством отверстия в ней, и которая расположена преимущественно заглубленной в поверхность платформы,позволяет упростить конструкцию узла крепления, что направлено на повышение удобства его использования. Выполнение устройства фиксации таким, что содержит угловые упоры по бокам каждого торцевого узла для...
Стабилизированная платформа
Номер патента: U 572
Опубликовано: 30.06.2002
Авторы: Толмачев Вячеслав Иванович, Коничев Алексей Викторович
МПК: F41G 5/04
Метки: платформа, стабилизированная
Текст:
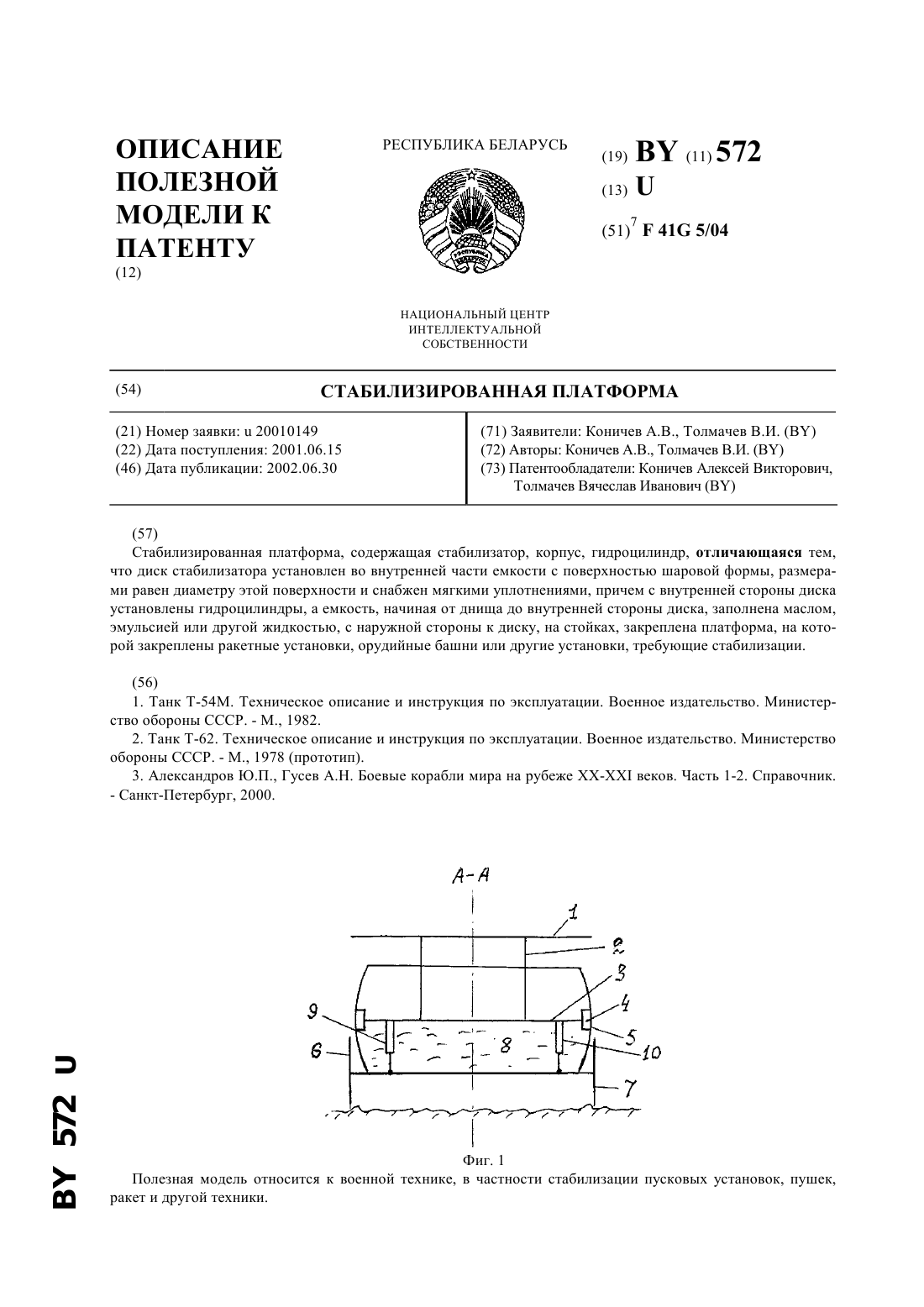
...гидроцилиндр, отличается в следующих существенных признаках корпус стабилизатора выполнен в виде емкости шаровой формы с обрезанными вершинами, во внутренней части емкости установлен диск стабилизатора размером по диаметру, соответствующим этой поверхности, по периметру диска установлены специальные мягкие уплотнения. На внутренней стороне диска установлены гидроцилиндры, а емкость шаровой формы, начиная от днища до внутренней поверхности...
Платформа технологическая
Номер патента: U 7434
Опубликовано: 30.08.2011
Авторы: Демлянко Татьяна Викторовна, Скорина Вячеслав Петрович, Алампиев Олег Александрович, Иваньков Александр Николаевич, Довженок Лидия Николаевна, Кротиков Сергей Петрович
МПК: B62D 53/06
Метки: платформа, технологическая
Текст:
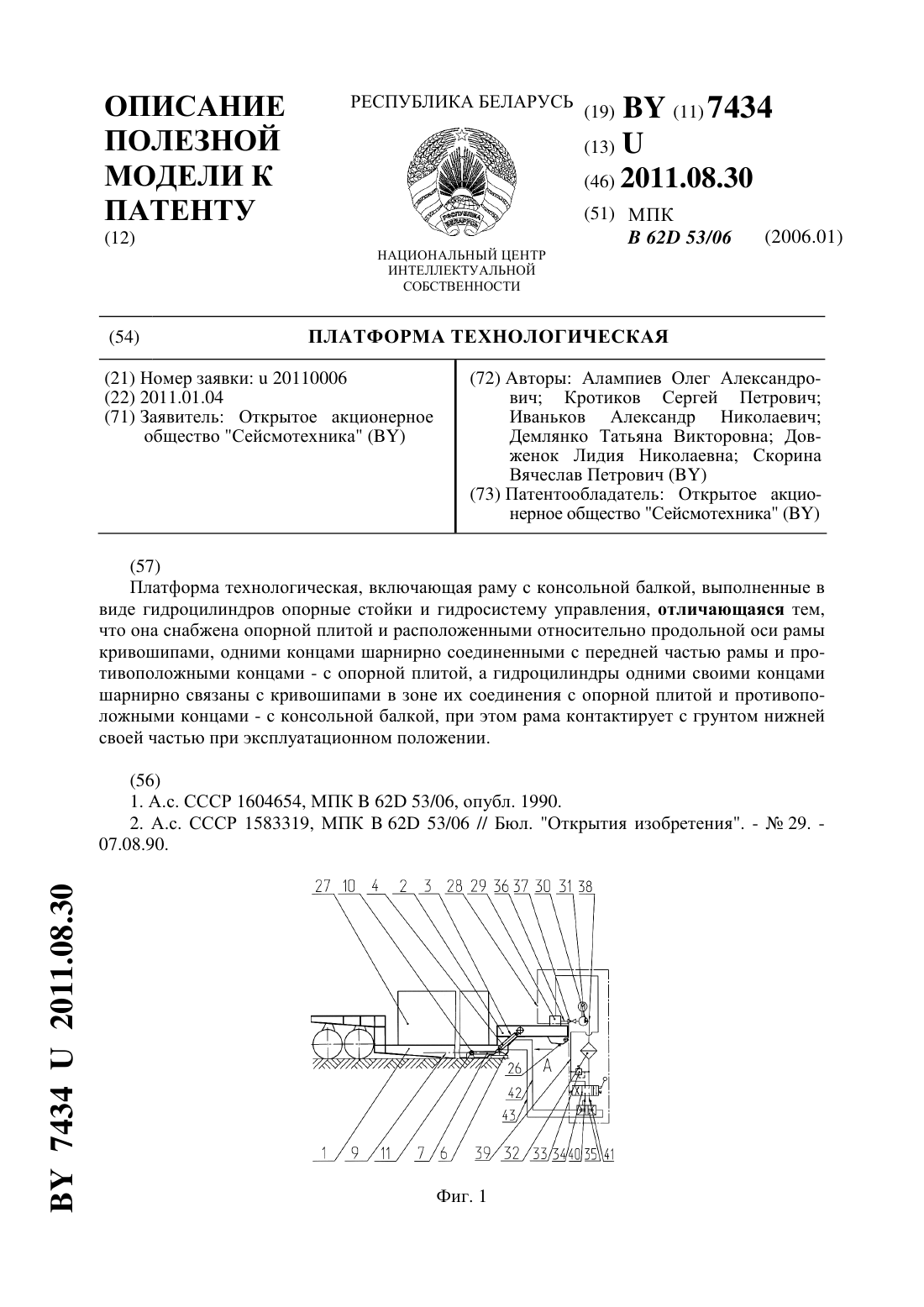
...а противоположными концами - с опорной плитой 6 в средней ее части пальцами 12 и 13 через кронштейны 14 и 15. Гидроцилиндры 4 и 5 двухстороннего действия одними своими концами шарнирно соединены с кривошипами 7 и 8 посредством пальцев 16 и 17. Пальцы 16 и 17 в свою очередь соединены со щеками 18 и 19, которые жестко связаны с концами кривошипов 7 и 8 соответственно. Противоположными концами гидроцилиндры 4 и 5 посредством осей 20 и...
Предыдущий патент: Устройство для представления подвижных изображений
Следующий патент: Осветительная установка для микроскопа бинокулярного стереоскопического
Случайный патент: Способ лечения эндометрита у родильницы