Динамическая платформа
Текст
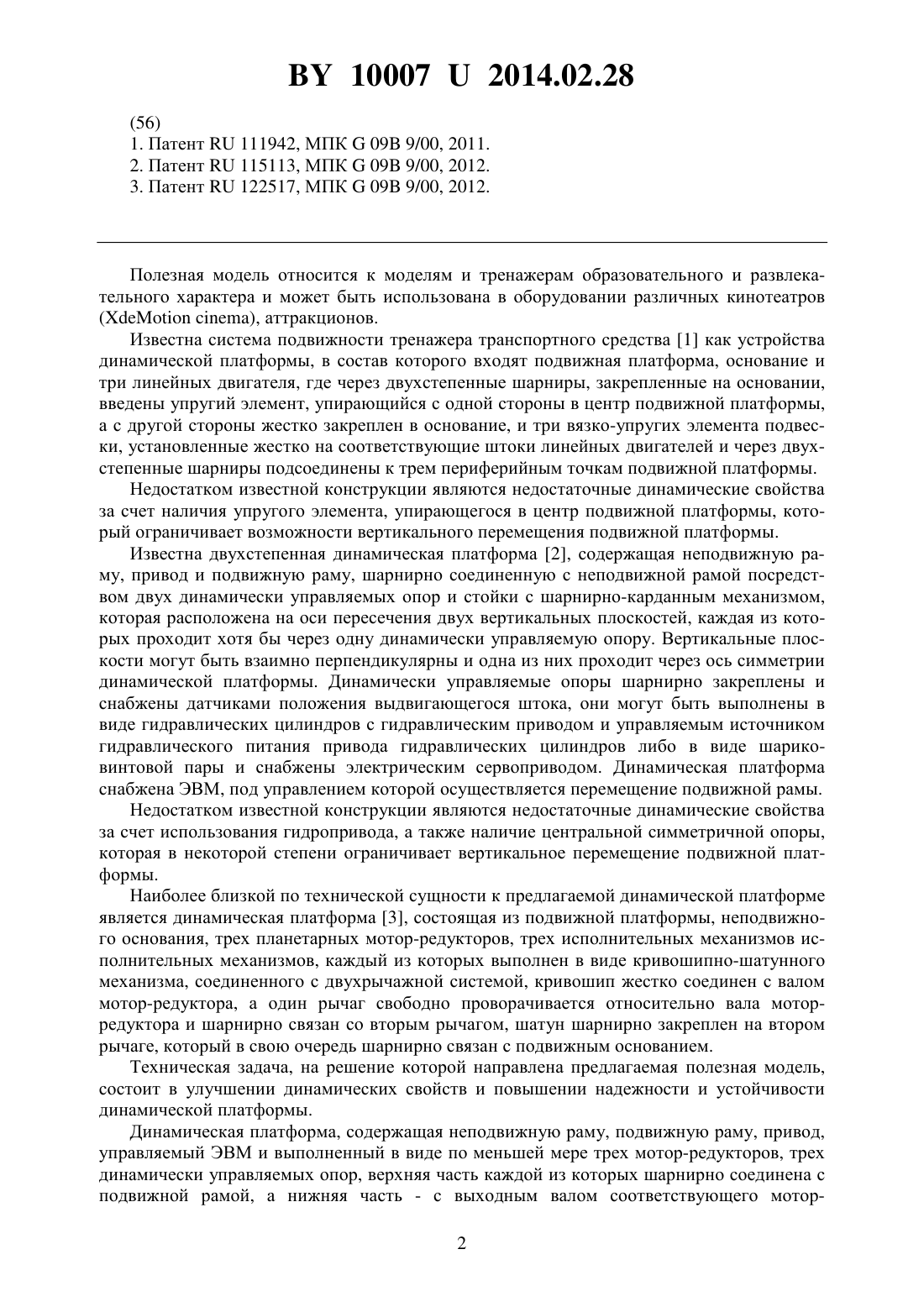
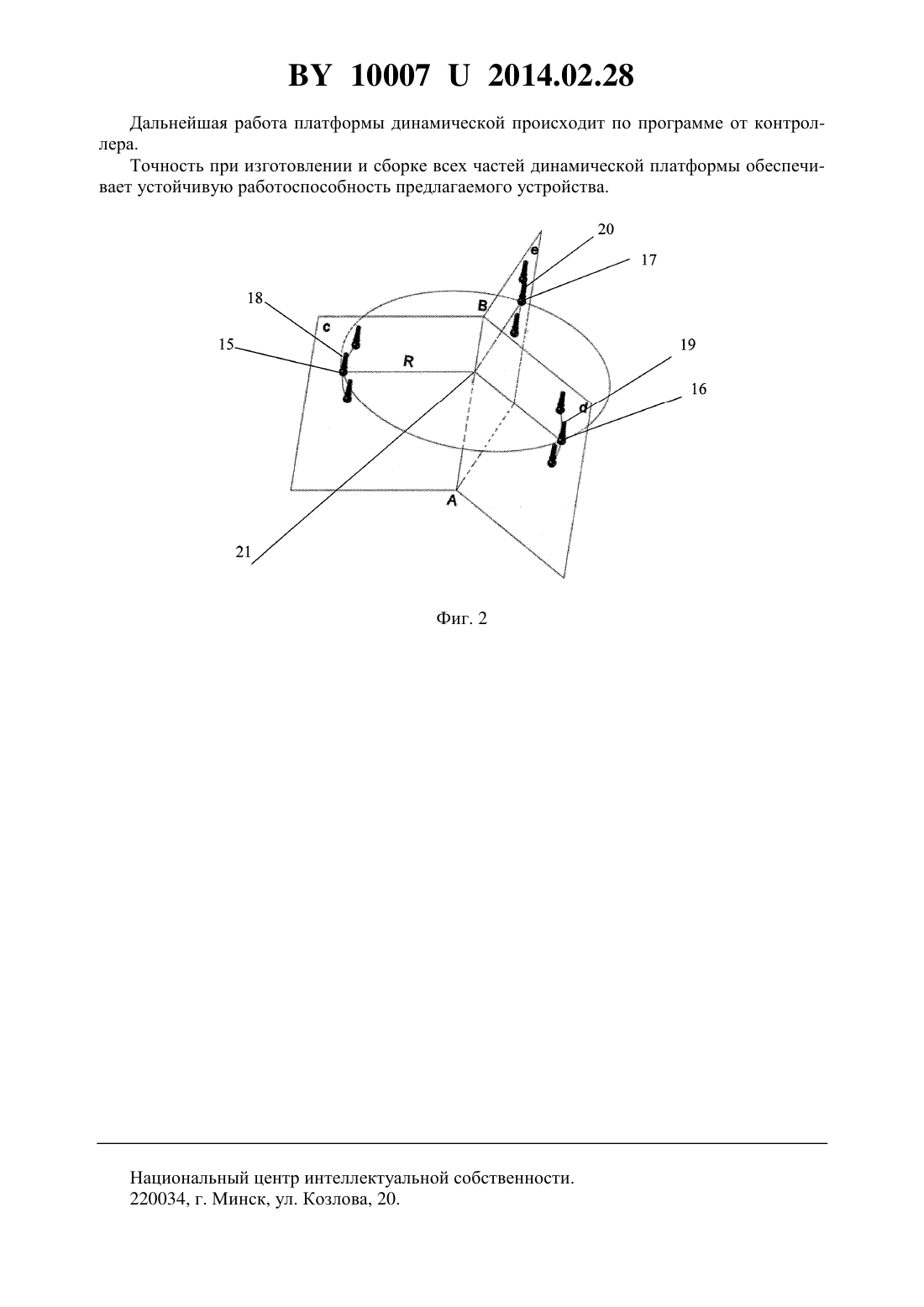
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Частное производственно-торговое унитарное предприятие АЕТ групп(72) Автор Станкевич Василий Францевич(73) Патентообладатель Частное производственно-торговое унитарное предприятие АЕТ групп(57) 1. Динамическая платформа, содержащая неподвижную раму, подвижную раму, привод, управляемый ЭВМ и выполненный в виде по меньшей мере трех мотор-редукторов,трех динамически управляемых опор, верхняя часть каждой из которых шарнирно соединена с подвижной рамой, а нижняя часть, с выходным валом соответствующего моторредуктора и выполнена в виде кривошипно-шатунного механизма, отличающаяся тем,что точки крепления шарнирного соединения динамически управляемых опор с подвижной рамой расположены на виртуальной окружности таким образом, что центр этой окружности находится на линии пересечения пространственных плоскостей, в которых происходит вращение точек шарнирного соединения динамически управляемых опор, с подвижной рамой. 2. Динамическая платформа по п. 1, отличающаяся тем, что в качестве двигателей мотор-редукторы содержат асинхронные двигатели. 3. Динамическая платформа по п. 1, отличающаяся тем, что содержит трехосевой контроллер. 4. Динамическая платформа по п. 1, отличающаяся тем, что динамически управляемые опоры содержат датчики нулевого положения. Полезная модель относится к моделям и тренажерам образовательного и развлекательного характера и может быть использована в оборудовании различных кинотеатров( ), аттракционов. Известна система подвижности тренажера транспортного средства 1 как устройства динамической платформы, в состав которого входят подвижная платформа, основание и три линейных двигателя, где через двухстепенные шарниры, закрепленные на основании,введены упругий элемент, упирающийся с одной стороны в центр подвижной платформы,а с другой стороны жестко закреплен в основание, и три вязко-упругих элемента подвески, установленные жестко на соответствующие штоки линейных двигателей и через двухстепенные шарниры подсоединены к трем периферийным точкам подвижной платформы. Недостатком известной конструкции являются недостаточные динамические свойства за счет наличия упругого элемента, упирающегося в центр подвижной платформы, который ограничивает возможности вертикального перемещения подвижной платформы. Известна двухстепенная динамическая платформа 2, содержащая неподвижную раму, привод и подвижную раму, шарнирно соединенную с неподвижной рамой посредством двух динамически управляемых опор и стойки с шарнирно-карданным механизмом,которая расположена на оси пересечения двух вертикальных плоскостей, каждая из которых проходит хотя бы через одну динамически управляемую опору. Вертикальные плоскости могут быть взаимно перпендикулярны и одна из них проходит через ось симметрии динамической платформы. Динамически управляемые опоры шарнирно закреплены и снабжены датчиками положения выдвигающегося штока, они могут быть выполнены в виде гидравлических цилиндров с гидравлическим приводом и управляемым источником гидравлического питания привода гидравлических цилиндров либо в виде шариковинтовой пары и снабжены электрическим сервоприводом. Динамическая платформа снабжена ЭВМ, под управлением которой осуществляется перемещение подвижной рамы. Недостатком известной конструкции являются недостаточные динамические свойства за счет использования гидропривода, а также наличие центральной симметричной опоры,которая в некоторой степени ограничивает вертикальное перемещение подвижной платформы. Наиболее близкой по технической сущности к предлагаемой динамической платформе является динамическая платформа 3, состоящая из подвижной платформы, неподвижного основания, трех планетарных мотор-редукторов, трех исполнительных механизмов исполнительных механизмов, каждый из которых выполнен в виде кривошипно-шатунного механизма, соединенного с двухрычажной системой, кривошип жестко соединен с валом мотор-редуктора, а один рычаг свободно проворачивается относительно вала моторредуктора и шарнирно связан со вторым рычагом, шатун шарнирно закреплен на втором рычаге, который в свою очередь шарнирно связан с подвижным основанием. Техническая задача, на решение которой направлена предлагаемая полезная модель,состоит в улучшении динамических свойств и повышении надежности и устойчивости динамической платформы. Динамическая платформа, содержащая неподвижную раму, подвижную раму, привод,управляемый ЭВМ и выполненный в виде по меньшей мере трех мотор-редукторов, трех динамически управляемых опор, верхняя часть каждой из которых шарнирно соединена с подвижной рамой, а нижняя часть - с выходным валом соответствующего мотор 2 100072014.02.28 редуктора и выполнена в виде кривошипно-шатунного механизма, при этом точки крепления шарнирного соединения динамически управляемых опор с подвижной рамой расположены на виртуальной окружности таким образом, что центр этой окружности находится на линии пересечения пространственных плоскостей, в которых происходит вращение точек шарнирного соединения динамически управляемых опор, с подвижной рамой. Виртуальный центр, вокруг которого происходит все движение, при любом движении платформы перемещается вертикально вдоль линии пересечения плоскостей, что обеспечивает устойчивость и точность работы всей платформы. В предпочтительном варианте исполнения динамической платформы в качестве двигателей мотор-редукторы содержат асинхронные двигатели, а управление платформой осуществляют трехосевым контроллером. Также динамически управляемые опоры содержат датчики нулевого положения, управление приводами осуществляют посредством ЭВМ. Полезная модель поясняется фигурами. На фиг. 1 - внешний вид динамической платформы. На фиг. 2 - расположение пространственных плоскостей. На фиг. 1 представлена динамическая платформа, которая состоит из неподвижной рамы 1, на которой расположен привод, состоящий из двигателей 2, 3, 4 и редукторов 5, 6,7. Динамические управляемые опоры в виде шатунов 8, 9, 10 и кривошипно-шатунных механизмов 11, 12, 13 механически связаны с подвижной рамой 14 через точки шарнирного соединения 15, 16, 17 в виде шаровых опор 18, 19, 20. Шатуны 8, 9, 10 крепятся на выходных валах редукторов 5, 6, 7. Соединение подвижной рамы 14 с динамически управляемыми опорами в виде шатунов 8, 9, 10 и кривошипно-шатунных механизмов 11, 12, 13 через шаровые опоры 18, 19, 20 обеспечивает устойчивость и работоспособность всей динамической платформы. На фиг. 2 схематично представлены шаровые опоры 18, 19, 20, к которым крепится верхняя подвижная рама 14 в точках шарнирного соединения 15, 16, 17. Плоскости , ,плоскости в которых расположены траектории перемещения шаровых опор 18, 19, 20. Линия- линия пересечения плоскостей , , . Радиус- радиус окружности, на которой расположены шаровые опоры 18, 19, 20, а точка 21 - центр этой окружности. Привод в виде двигателей 2, 3, 4 (асинхронных с энкодерами) и редукторов 11, 12, 13 закреплен на неподвижной раме 1 таким образом, чтобы пространственные плоскости , в которых вращаются точки шарнирного соединения 15, 16, 17 шаровых опор 18, 19, 20,имели одну общую линию пересечения , так что линия пересечения пространственных плоскостей , ,проходит через виртуальный центр 21 окружности, на которой находятся шары шаровых опор 18, 19, 20. Динамическая платформа работает следующим образом. В ЭВМ записывается программа, в соответствии с которой на ее выходах формируются управляющие сигналы для обеспечения смещений подвижной рамы 14. Работа и управление динамической платформой обеспечивается трехосевым контроллером (на фигурах не показан) на который поступают сигналы от ЭВМ. По сигналу от контроллера асинхронные двигатели 2, 3, 4 поворачивают кривошипы в направлении датчиков нулевого положения. После срабатывания датчиков кривошипы поворачиваются на определенный угол в обратном направлении, обеспечивая исходное положение кривошипа. Сигнал о величине угла поворота кривошипа подается на контроллер от энкодера (на фигурах не показан). После срабатывания датчиков кривошипы поворачиваются на определенный угол в обратном направлении, обеспечивая исходное положение кривошипа. 100072014.02.28 Дальнейшая работа платформы динамической происходит по программе от контроллера. Точность при изготовлении и сборке всех частей динамической платформы обеспечивает устойчивую работоспособность предлагаемого устройства. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: G09B 9/00
Метки: динамическая, платформа
Код ссылки
<a href="https://by.patents.su/4-u10007-dinamicheskaya-platforma.html" rel="bookmark" title="База патентов Беларуси">Динамическая платформа</a>
Железнодорожная платформа для крупнотоннажных грузов

Номер патента: U 4767
Опубликовано: 30.10.2008
Авторы: Гончаренко Игорь Владиславович, Масликов Юрий Валентинович, Момот Сергей Иванович
МПК: B61D 3/00
Метки: грузов, крупнотоннажных, железнодорожная, платформа
Текст:
...Выполнение устройства фиксации таким, что содержит, по меньшей мере, один штырь в ложементе каждого торцевого узла для соединения с балкой посредством отверстия в ней, и которая расположена преимущественно заглубленной в поверхность платформы,позволяет упростить конструкцию узла крепления, что направлено на повышение удобства его использования. Выполнение устройства фиксации таким, что содержит угловые упоры по бокам каждого торцевого узла для...
Стабилизированная платформа
Номер патента: U 572
Опубликовано: 30.06.2002
Авторы: Толмачев Вячеслав Иванович, Коничев Алексей Викторович
МПК: F41G 5/04
Метки: платформа, стабилизированная
Текст:
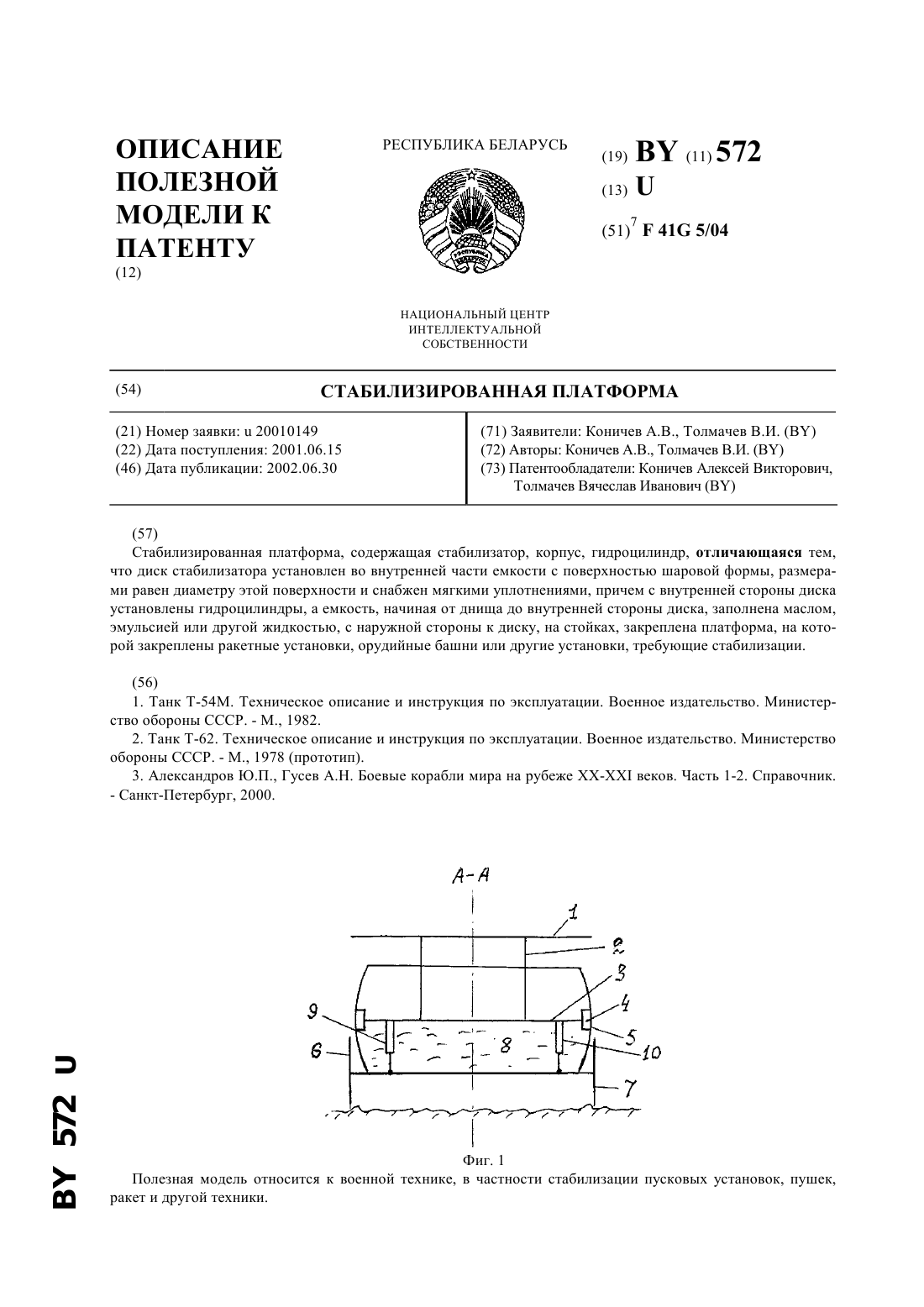
...гидроцилиндр, отличается в следующих существенных признаках корпус стабилизатора выполнен в виде емкости шаровой формы с обрезанными вершинами, во внутренней части емкости установлен диск стабилизатора размером по диаметру, соответствующим этой поверхности, по периметру диска установлены специальные мягкие уплотнения. На внутренней стороне диска установлены гидроцилиндры, а емкость шаровой формы, начиная от днища до внутренней поверхности...
Платформа технологическая
Номер патента: U 7434
Опубликовано: 30.08.2011
Авторы: Довженок Лидия Николаевна, Кротиков Сергей Петрович, Иваньков Александр Николаевич, Алампиев Олег Александрович, Демлянко Татьяна Викторовна, Скорина Вячеслав Петрович
МПК: B62D 53/06
Метки: технологическая, платформа
Текст:
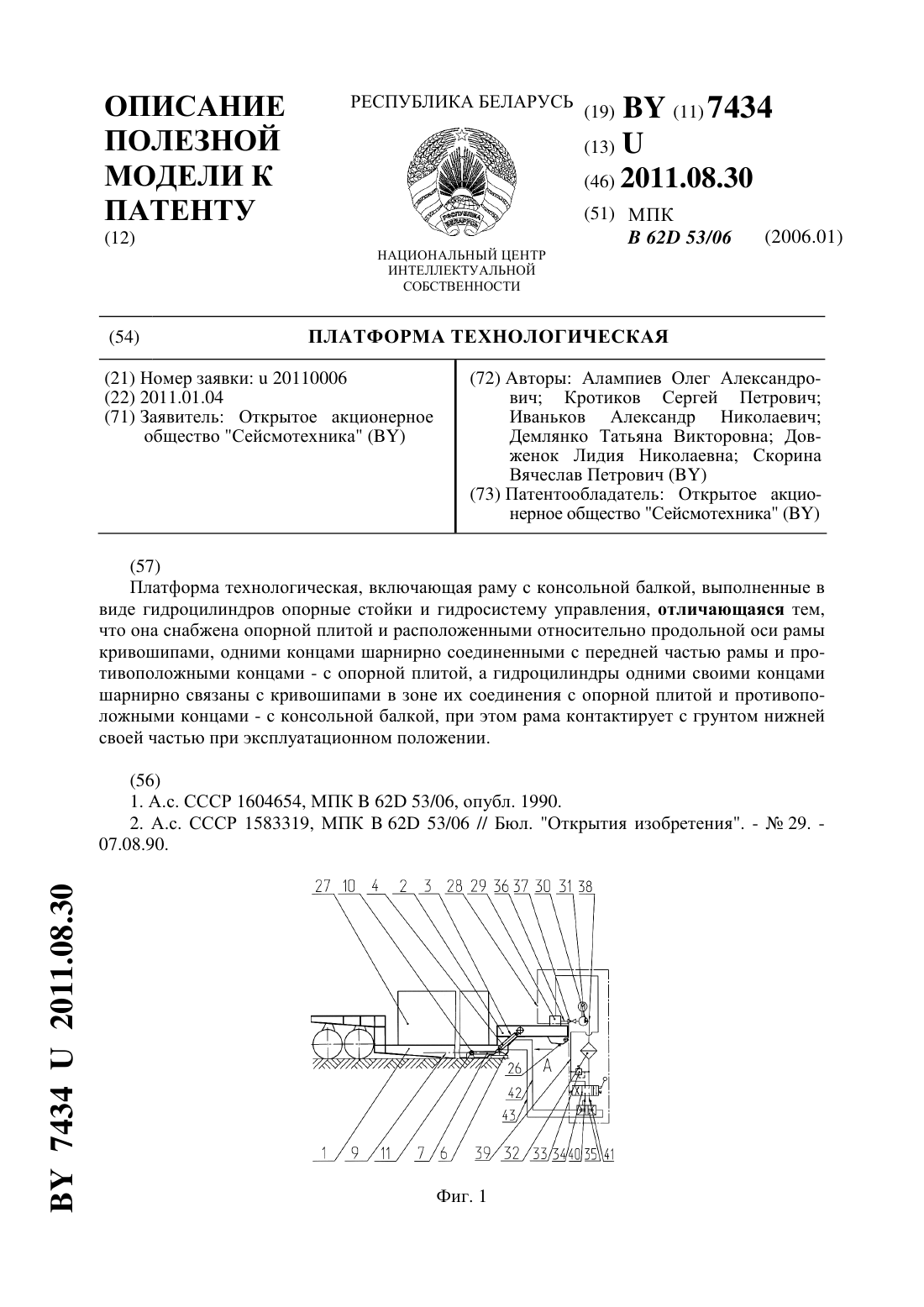
...а противоположными концами - с опорной плитой 6 в средней ее части пальцами 12 и 13 через кронштейны 14 и 15. Гидроцилиндры 4 и 5 двухстороннего действия одними своими концами шарнирно соединены с кривошипами 7 и 8 посредством пальцев 16 и 17. Пальцы 16 и 17 в свою очередь соединены со щеками 18 и 19, которые жестко связаны с концами кривошипов 7 и 8 соответственно. Противоположными концами гидроцилиндры 4 и 5 посредством осей 20 и...
Платформа
Номер патента: 13398
Опубликовано: 30.08.2010
Авторы: ЛЁРГОРД, Бо, ДИКНЕР, Аллэн
МПК: B65D 19/00
Метки: платформа
Текст:
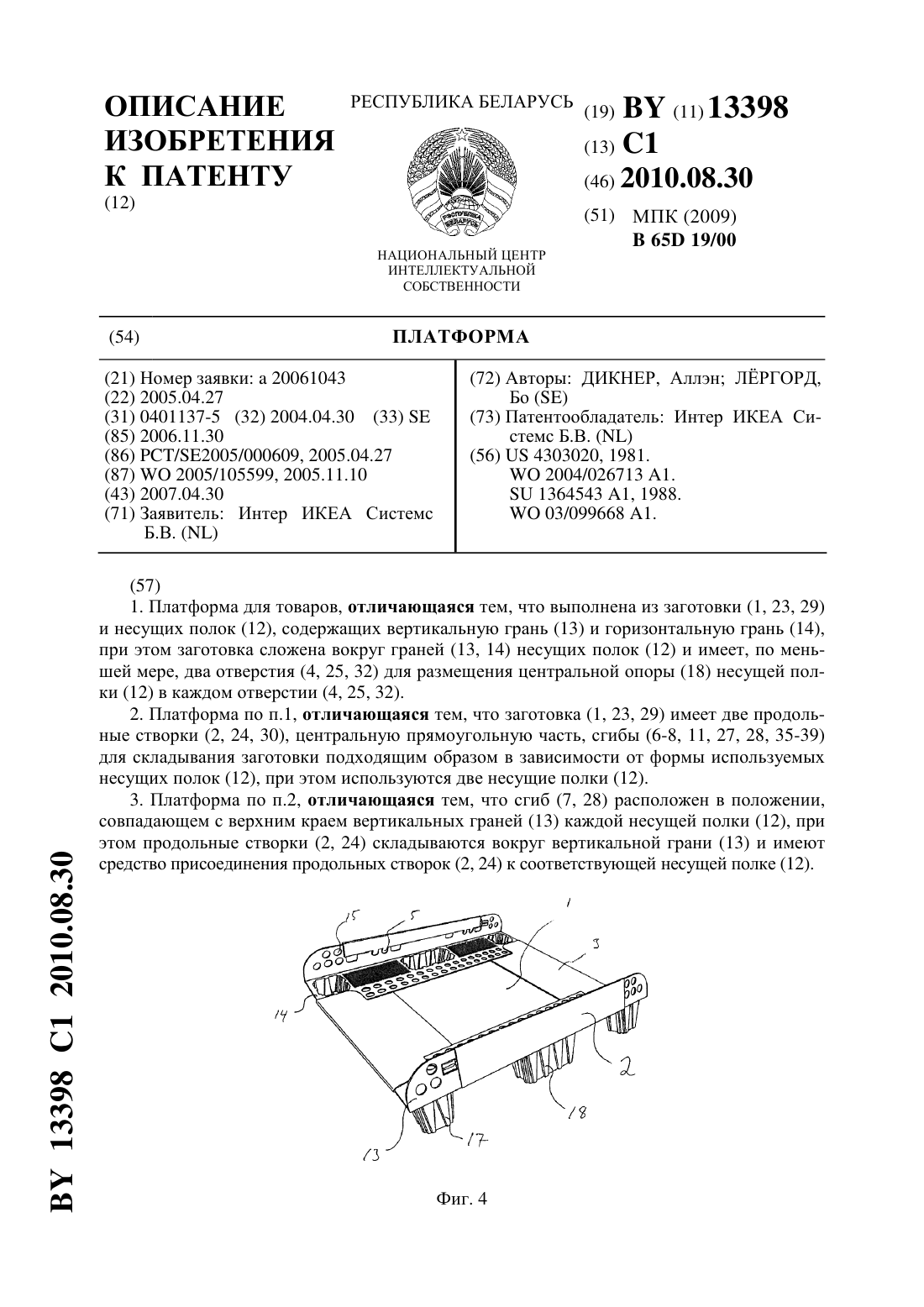
...несколько язычков 5. В показанном варианте осуществления на каждой створке 2 расположено четыре язычка 5, но количество и форма язычков 5 могут варьироваться в зависимости от конструкции несущих полок и т.п., используемых с платформой. 4 13398 1 2010.08.30 Каждая продольная створка 2 имеет два продольных сгиба 6, 7, проходящих по всей длине створок 2. Один сгиб 6 расположен, примыкая к прямоугольному отверстию 4 каждой продольной створки 2....
Поддерживающая платформа для формирования липидного бислоя в мембранных биосенсорах
Номер патента: U 6049
Опубликовано: 28.02.2010
Авторы: Судник Юрий Михайлович, Лобан Валерий Александрович, Лабунов Владимир Архипович, Ореховская Таиса Ивановна, Лобко Эдвард Владимирович, Драпеза Александр Иванович
МПК: B82B 1/00, C12M 3/00, B81B 1/00...
Метки: поддерживающая, мембранных, платформа, бислоя, формирования, биосенсорах, липидного
Текст:
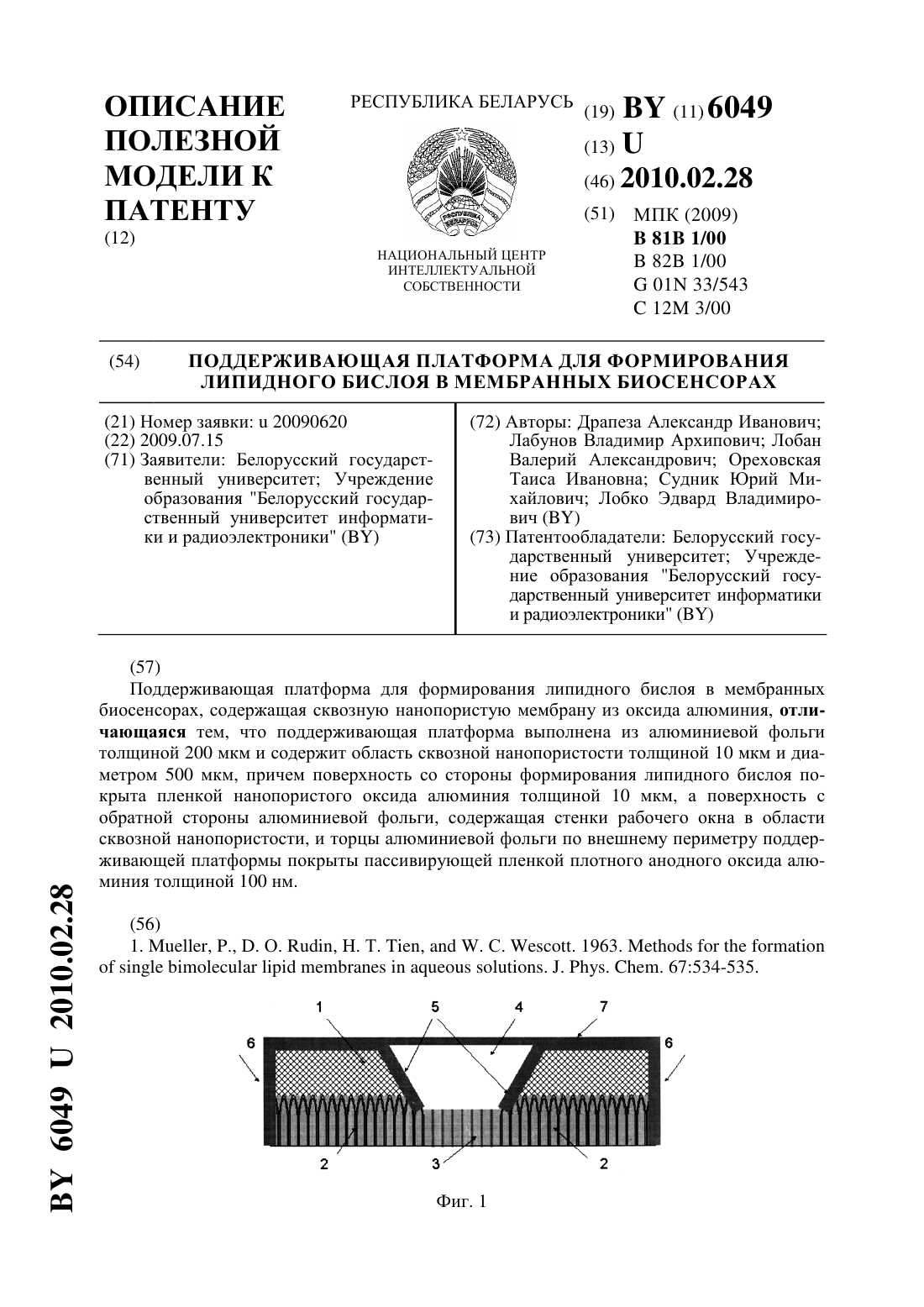
...для формирования липидного бислоя в мембранных биосенсорах, содержащая сквозную нанопористую мембрану из оксида алюминия, выполнена из алюминиевой фольги толщиной 200 мкм и содержит область сквозной нанопористости толщиной 10 мкм и диаметром 500 мкм, причем поверхность со стороны формирования липидного бислоя покрыта пленкой нанопористого оксида алюминия толщиной 10 мкм, а поверхность с обратной стороны алюминиевой фольги, содержащая...
Предыдущий патент: Детекторный диод с балочными выводами
Следующий патент: Ограждение входа на передвижную доильную установку
Случайный патент: Транспортное средство