Подвижная шпалоподбивочная нивелировочная и рихтовочная машина
Текст
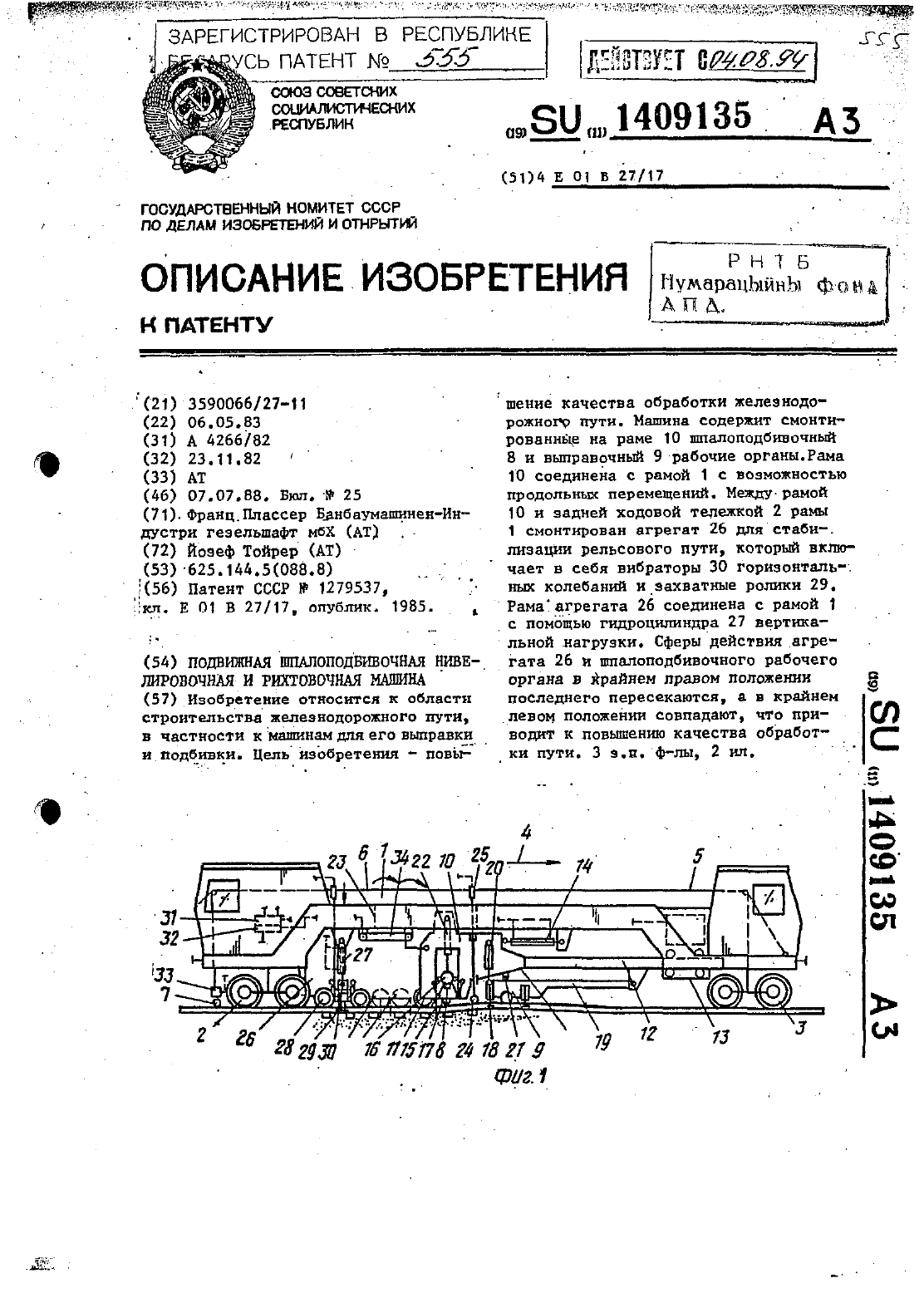
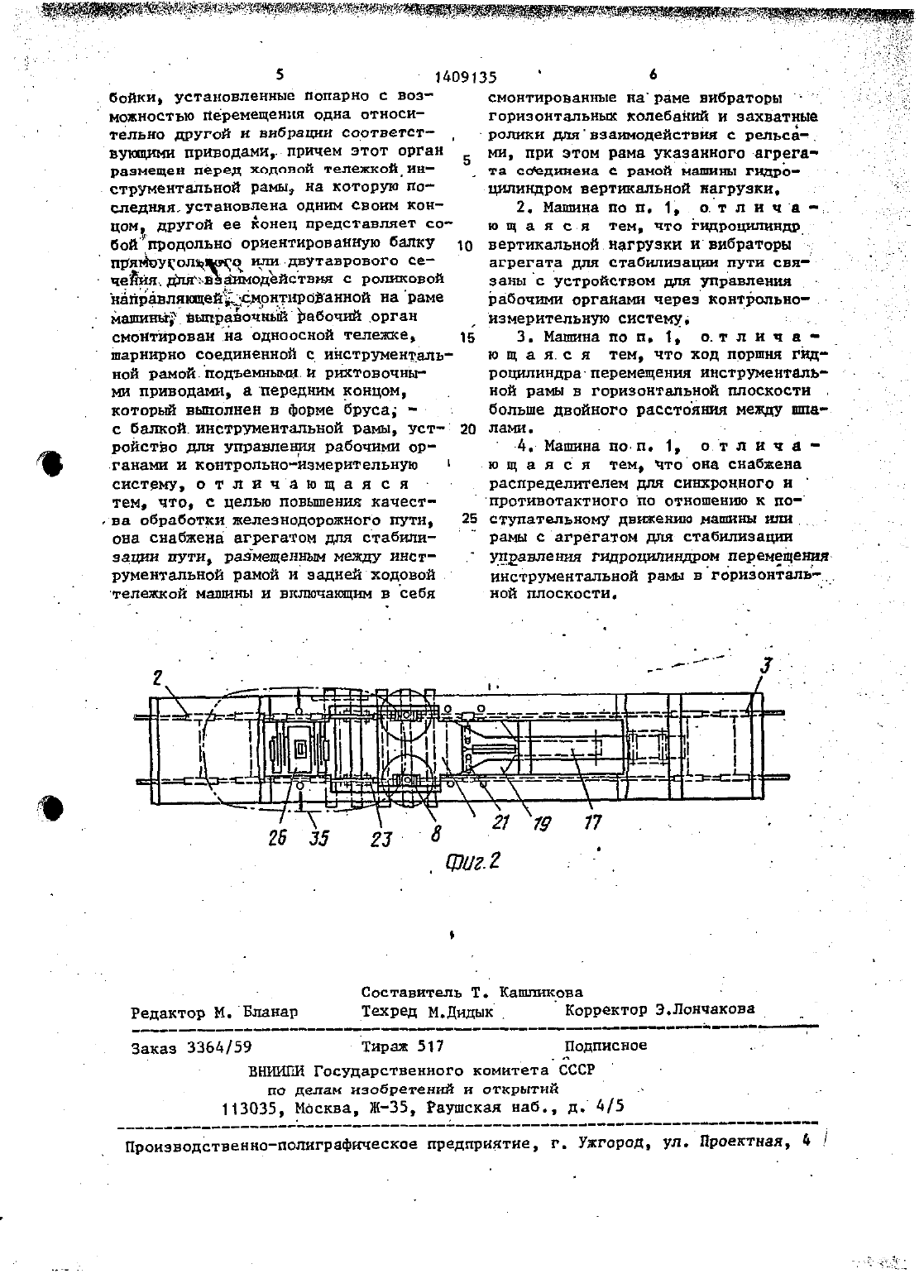
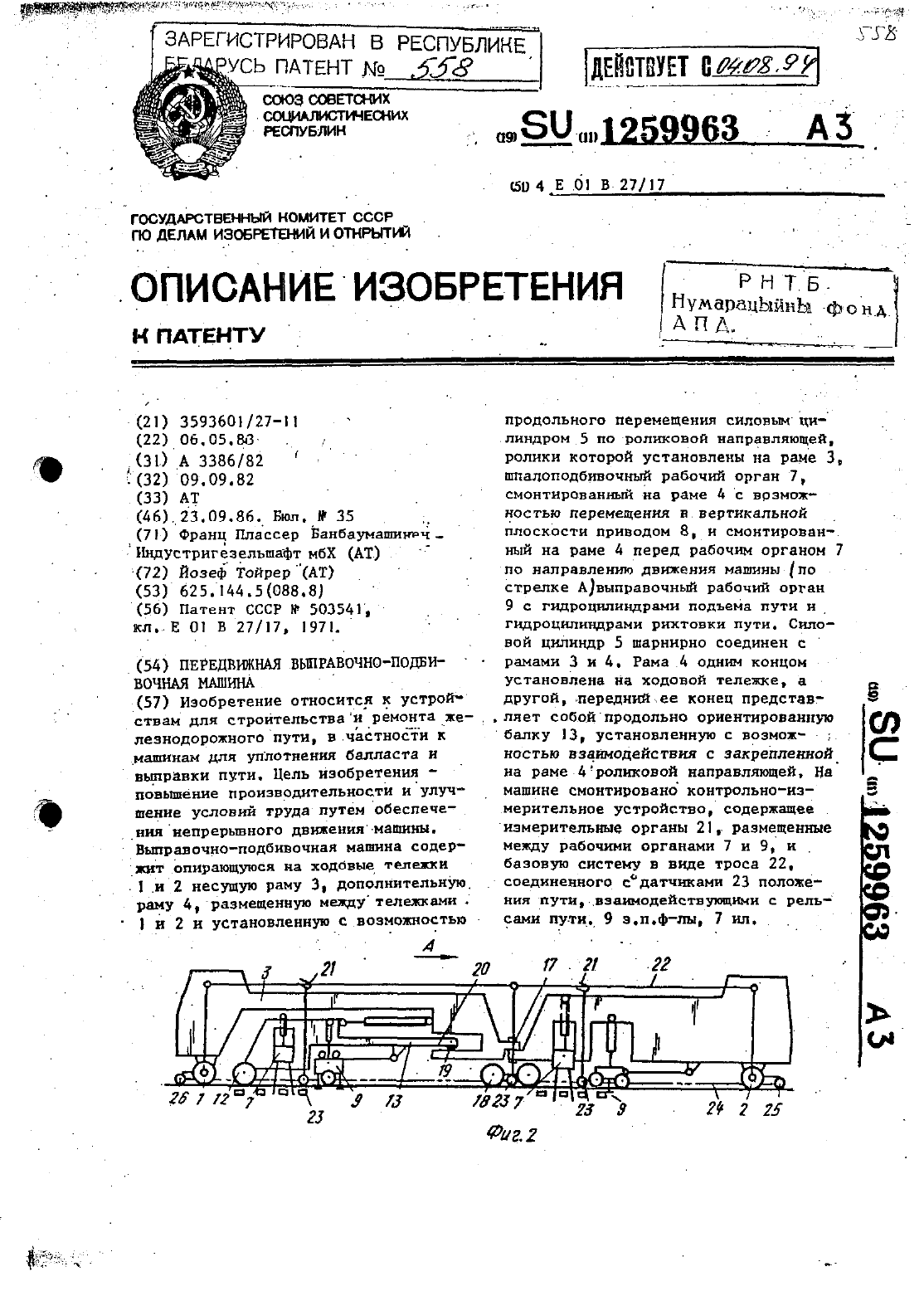
ГОСУДАРСТВЕННЫЙ комитет ссор по далям изоврвтшии и оп-кгьлтш(57) Изобретение относится к области строительстважодеэнодорожного ПУТИ, В ЧЦСТНОСТИ К тчвдпинам ДЛЯ ЕГО ЕЬШРЕВКРЪгшени качества обработки железнодо рожного пути. Машина содержит смонтированные на раме 10 шалоподбишочный10 и задней ходовой тележкой 2 рамынм колебани изахватные ролки 29.Рамаагрегата 26 соединена с рамой 1 с помощью гидроцилиндра 27 вертиальной.нагрузки. Сферы действия агрергата 26 и шалоподбнвочного рабочегооргана в крайнем правом положении последнего пересекаются, а в крайнем левом положении совпадают, что приводит К ловышенн качества обработИзобретение относится к строительству железнодорожного пути в частности к машинам для его выправки н подбнвкн.Цель изобретения - повышение качества обработки железнодорожного путиаМашина содержит раму 1, перекатываемую с помощью ходовым тележек 2 и 3 по железнодорожному пути. Направление рабочего хода машины отмечено стрелкой 4. Машина оснащена контрольно-нзмернтельной системой 5 которая иеет трос 6 для каждого рельсв. Передний конец каждого троса направляется через ходовую тележку 3 по невыправленномупутнаегоэаднийконецчерез щуп 7 по выравленному пути. Рабочий узел состоит из шалоподбивопного 8 и выправочного 9 ра 10водамии размещен на инструментальной раме 10.Рама 1 О выолнена в виде одноос ной тележки и опирается одннм концомна рельсовый путь через ходовую те лежку 11, а другим своим концом шар ннрно соединена с рамой 1. Соединенны с рамой Т конец рамы 10 выполнен в виде продольно ориентированной балки-12 прямоугольного или двутаврового сечения для взаимодействия с направляющей 13 нз ропков, снабженным с обеи сторон направляюшми буртиамиН УСТННОВЛВННЫХ С ВОЭМОЖНОСТЬЮ ПОВО рота на раме 1. Боковой зазор между балой 12 и буртиками роликов обес-е печнвает возможность поворота рам10 вокруг ее опорного участка на раШпалоподбивочныи рабочиорган 8 р содержит погружаемые в щебень шпалаподбивочные механизмы 15, которые через гидравлические ЭКСЦЕНТРИКОБЫЗ внброприводы приводятся в параллель ные рельсам колебательные движения.Кроме того, механизмы 15 могут быть соединены с виброприводом 16 длясообщения им колебательным двиени В поперечной направлени пути плос кости. для ориентирования шпапоподбипочного рабочего органа относителя но шпалы служит нндуктнвнй датчик 17, смонтированный на раме 10.Вьшравочньй 9 рабочий орган содержит направляемую по рельсовому пути с помощью рнхтовочнъш ролиов И ОСНЗЩЕННУЮ Поворачнваемыми под головкой рельсов подъемным роликами 18 раму 19, представляющую собой одноосную тележку,шарннрно соединенную своим передним концом с инструментальной рамой 10. Кроме того,рама 19 соединена с рамой 10 через путеподъемные 20 и рихтовочные 21 приводы.Для того чтобы не мешать работе приводов 22 регулировки шпапоподби вочного рабочего органа 8 по высоте рама 1 выполнена с проемом 23. В области между шпалоподбивочным 8 н выправочным 9 рабочими органами предусмотрен измерительный инструмент 24, с которм соединен один на кажды рельс, выполненнй, например, в виде потенциометра с поворотным двиком, измерительный щуп 25, взаимодействущий с тросом 6.Между инструментальной рамой 10ненный с рамой 1 гидроприводом 27. Агрегат 26 содержит направляющие ребордные ролики 28 н рельсовые захваты 29, смонтированные с возможностью поворота в поперечной вертикальной плоскости. для создания колебаний в поперечной горизонтельной плоскости установлены вибраторы ЗО. Эти колебанияа также прикпадываемые гидроприводами 27 нагрузки передаются на рельсовьй путь через ролики 28 н захва ты 29.Машина ОСНЗЩЕНЗ ЭЗЗЛИЧНЫИ д 0 П 0 Л нтельным устройствами, которые позволяют осуществлять автоматическое управление различными функциями перемещения при непрерывном безостановочном поступательном движении машины и шаговом продвижении инструментальной рам 10 от одного участ ка подбивкн шпал К другому, такимикак устройство 31 управленмян распределитель 32. . Распределитель 32 для обеспечения управления связан с тремя различными дополнительньмм приборами. Одним из этих приборов является кон СТРУКТИВНО ОЪВДННЕННЫ СО ЩУПОМ 7прибор 33 для намерения расстояния,который на каждую единицу расстояния пройденного машиной вперед пути выдает управляющий импульс на рас пределитель 32, синхронно н противо тактно с поступательньм движением машины регулирующий приток рабочей жидкости в правую камеру гидроцилиндра 1 д продольного перемещения, так что рама 10 до завершения процес са П 0 дбивки шпал остается на местеБ ЦЕНТРНРОБВННОМ ПОЛОЖЕНИИ ПО ОТНОП 0 днятня шпалоподбивочного 3 рабочего органа распределитель 32 реверсируется и рама 10 ускоренным ходом передвигается вперед до тех пор,пока рабочн орган не оказывается в центрированием положениипо отношению к следующей подбиваемой шпала. Одновременно с опусканием шпалопод бивочного 8 рабочего органа устанавливается в нуль прибор для измеренияРЗССТОЯНИЯ, ПОСЛЕ ЧЕГО начинается повторньй рабочий цикл Аналогичнъй процесс перемещений производится при использовании регистрирующего смещение рамы 10 ирамы 1 относительно друг друга потен- 30циометра натяжения тросе 34, который прикреплен сбоку от рамы 10 на перекладине рамы 1. В этом случае управ ление двиением поршня гидроцилиндра 14 осуществляется пропорционадБ.но двиению перемещения соединенной рамой 10 и потенциометром натяжения троса Зд штангой или формируемому вкачестве ЗНЗЛОГОВОГО сигнала ВЫХОД.НОМУ НАПРЯЖЕНИЕ ПОТЗНЦИОМЕТБЗ НЗТЯЖЕ до-действующий с рельсовыми скреплени ями индуктивный датчик 17. Он нейтра- 45 лен до тех пор, пока находится в цент рированном положении по отношению к соответствующему путевому болту. При отклонении от своей центрированной позиции индуктивный датчик 17 выдает управляющий сигнал, иэменяющий приток рабочей жидкости-в гидропривод 1 д. Благодаря этому шалоподбивочньй 8 рабочи орган до завершения процесса подбивки шпал остается в центрированием положении по отношению к подбиваемой шпале. Поэтому ос нащенная агрегатом 26 для стабили зации пути машина может работать повыбору в режиме передвижения отно-1 сительно рамы 1 инструментальной ра- мой 10 в режиме непреръшного безостановочного движения вперед или в шагоВОМ РЕЖИМЕ, СОГПЗСУЕРЪШ С РВССТОНННЕН между шпалами.С помощью очерченного штрихпунктнр-4 ной линией круга 35 (фнг.2) изображена лТа СФеРадействня,виоторонвследствие колебательньы двиений вибраторов 30агрегата 26 возбуждается вибрация щебня и происходит его уплотнение. Вибрация поперек продольного направления рельсового пути отмечена двойньми стрелками в области захватов 29. Установленные с возможностью поперечной подачи шпалоподбивочные механизмы 15 с помощью внбропривода приводятся в параллельные продольному иаправлению рельсового пути колебательные двиеиия, сфера действия которых отмечена пунктирной лмнией,о 6 водощей кругом каждый шпвлоподбнвочнът 8 Рабочий орган. Сферы действия агрегата 26 н шпалоподбивочного 8 рабочего органа пересекаются в их крайнем правом положении. В левом конечном положении ппалоподбивочных рабоЧ ОРГЭНОВ ПРОИСХОДИТ полное совМещение СФЕР действия агрегата 26 и Указаннъш рабочих органов. При вводе.в эксплуатацию вибропривода 16 с помощью вибрирующих поперечнопро дольной оси рельсов шшалоподбивочныш механизмов 15 и рамы агрегат 26 может быть обеспечена сннфаэная вибрация.1. Подвижная шпалоподбивочнея Нвелировочная и рнтовочная машина,содержащая установленную на разнесенные ХОДОВЫЕ ТЕЛЕЖКИ РЗМУ, ИНСТРУМВН тельную раму с ходовой тележкой, смонТНРОБЗННУЮ МЕЖДУ указанным тележкам с возможностью перемещения в вертикальной и горизонтальной плоскостях гидроцилиндрам, шарнирно соединенными с рамой, и несущую шелоподбиВОЧНЬЙРаб 0 ЧНЙ орган, установленный с возможностью перемещения в вертикальной плоскости приводом. смонти РОНЗННЬЕЙ ПЕРЕД-НИМ ПО направлениюдвижения машины вьшравочныи рабочииборган с приводами подъема н рихтов ки, при этом шшалоподбивочнъш рабо ннй орган включает в себя шалоподБойки, установленные попарно с воз мощностью перемещения одна относи тельно дугой и вибрации соответст вующим приводами, причем этот орган размещен перед ходовой тележкойннструменталъной рам, на которую поспедняяустановлена одни своим кон цомд другой ее йонец представляет сое6 ойПводольно ориентированную балку ДДВУТЗВРОБОГО Сенправпяшщейсмонтнройанной на раме . д .,..,машныныправонный реБочиорган смонтирован на одноосной тележке, шарнирно соединенной с инструменталь ной рамой.лодъемными.н ринтовочны ми приводам, а передним нонцом который выполнен в форме бруса торойство для управленя рабочими органам и контрольно-измерительную систему, о т л И ч а ю щ а я с я тем, что, с целью повышения качестлва обработкижелезнодорожного пути,она снабжена агрегатом для стабилизации пути, размещениы между инструментальной рамой и задней ходовой. тележкой машин и вклчающи в себясмонтированные нараме вибраторы гориэонтальньш колебвни и захватныеролики длнвзаииодействии с рельса мм, при этом рама указанного-вгрегата соединена с рамой машины гидро цилиндром вертикальной нагрузки.2. Машина по п. 1 ю щ а я с.я тем, что тндроцилиндр вертикальной.нагрУзкн ивибраторы агрегата ДЛЯ стабилизации ПУТИ СВЯ ЗЗНЫ С УСТРОЙСТВОМ ДЛЯ УПЕВЛЕНИЯ рабочими органами через контрольноизмерительную систему.3. Машина по п. 1, о.т л н ч в ю щ а я.с я тем что ход поршня гидроцилиндра-перемещения инструментальной рамы в горизонтальной плоскости . больше двойного расстоння между шлаламм. - . . Й . р ды Машина но п. 1, о.т л и ч а тем, что она снабженараспределителем для сннронного нПРОТНВОТаКТНОГО ПО ОТНОШЕНИЮ К ПОступательному двншени машины ипн. рамы с агрегатом для стабилизацииуправленя гидроцилиндрам перемещения инструментальной рамы в горизонталь 1ВНИИ Государственного комитета ЕЬСР по делам изобретений н открытий 113035, Москва, Ж 35 Раушская наб., д.6/5
МПК / Метки
МПК: E01B 27/17
Метки: рихтовочная, машина, нивелировочная, подвижная, шпалоподбивочная
Код ссылки
<a href="https://by.patents.su/4-555-podvizhnaya-shpalopodbivochnaya-nivelirovochnaya-i-rihtovochnaya-mashina.html" rel="bookmark" title="База патентов Беларуси">Подвижная шпалоподбивочная нивелировочная и рихтовочная машина</a>
Шпалоподбивочная машина
Номер патента: 554
Опубликовано: 30.06.1995
Автор: Йозеф Тойрер
МПК: E01B 27/16
Метки: машина, шпалоподбивочная
Текст:
...и шпалы, подаются независимо друг от друга в зависимостиОТ СОСТОЯНИЯ ЗЛЛНСТЗ, НО ПРИ ЭТОМ на пластины 16 подбоек 11-14 действует одна н та же сила подачи. На подбойки 11-14 вибрация также передается НЗЗЕНСИМО ДРУГ ОТ ДРУГа Внижней части на фиг.1 пунктирными линиями показаны различные условияВ Которьж работают подбойки. В средней части показано уплотнение баллас та с обеих сторон шпалы 34 при рыщ лом и равномерно распределенном балласте...
Машина для выправки железнодорожного пути
Номер патента: 553
Опубликовано: 30.06.1995
Авторы: Йоханн Пихлер, Йозеф Тойрер
МПК: E01B 33/00, E01B 27/17
Метки: железнодорожного, выправки, пути, машина
Текст:
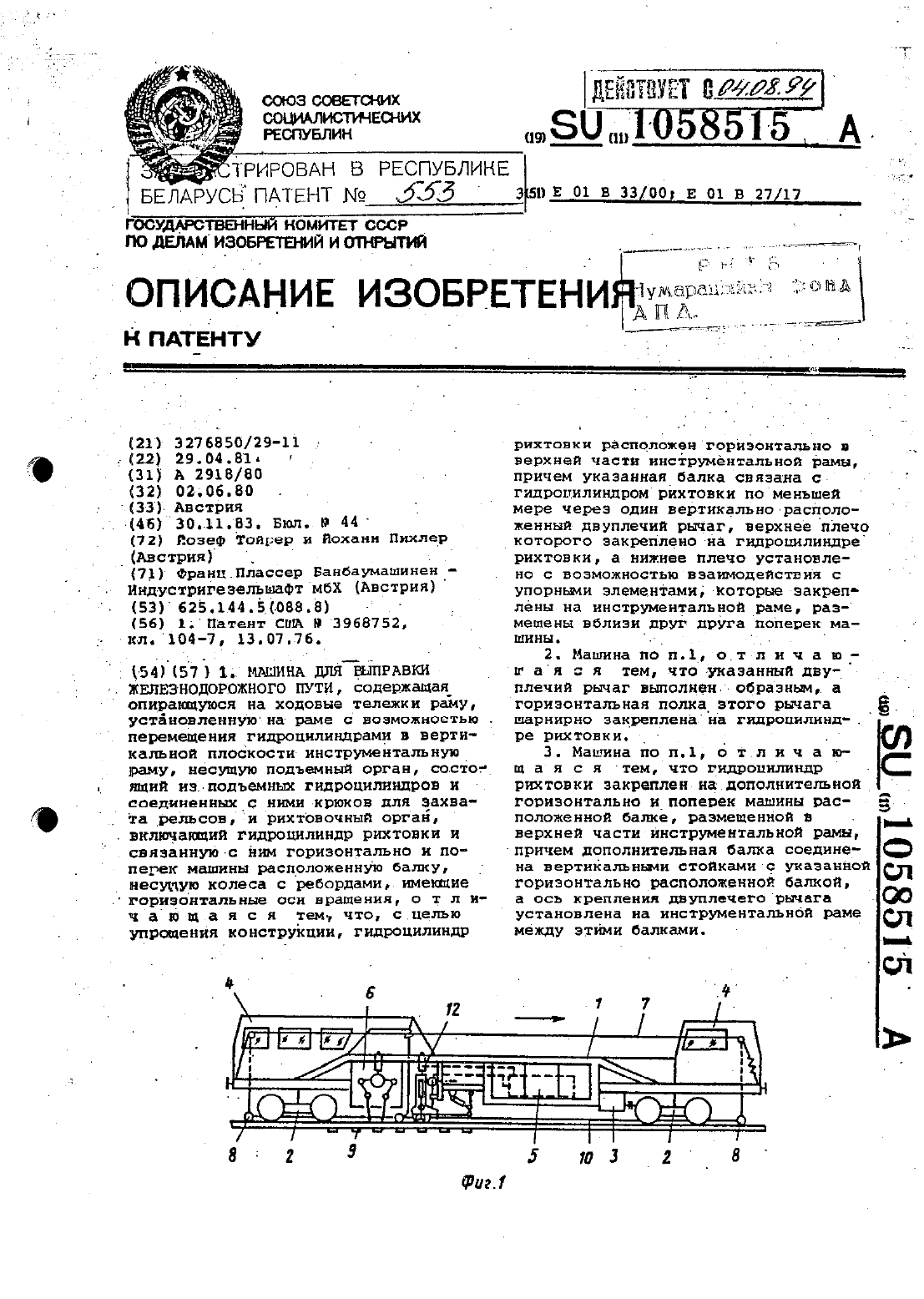
...стойками с указанНОЙ ГОРИЭОНТЕЛЬНО РЗСПОЛОЖЭННОЙ балкон. а ось крепления двуплечегорычага установлена на инструментальной раме между этими балками.На Фиг.1 изображена машина для выправки желеэнодорожногопути общий вид на фиг.2 подъемный ну рихтовочны органы в увеличенном масштабе, вид сбоку на фиг.3 Вид А На ФНг.2 наФиг.4 г вариант выполнения погъемного органа, вид сбоку на фиг.5 6 и 7 подъемныя и риктовочныи органы иекшие различные...
Выправочно-подбивочно-отделочная машина
Номер патента: 561
Опубликовано: 30.06.1995
Авторы: Йозеф Тойрер, Йоханн Хансманн
МПК: E01B 27/17
Метки: машина, выправочно-подбивочно-отделочная
Текст:
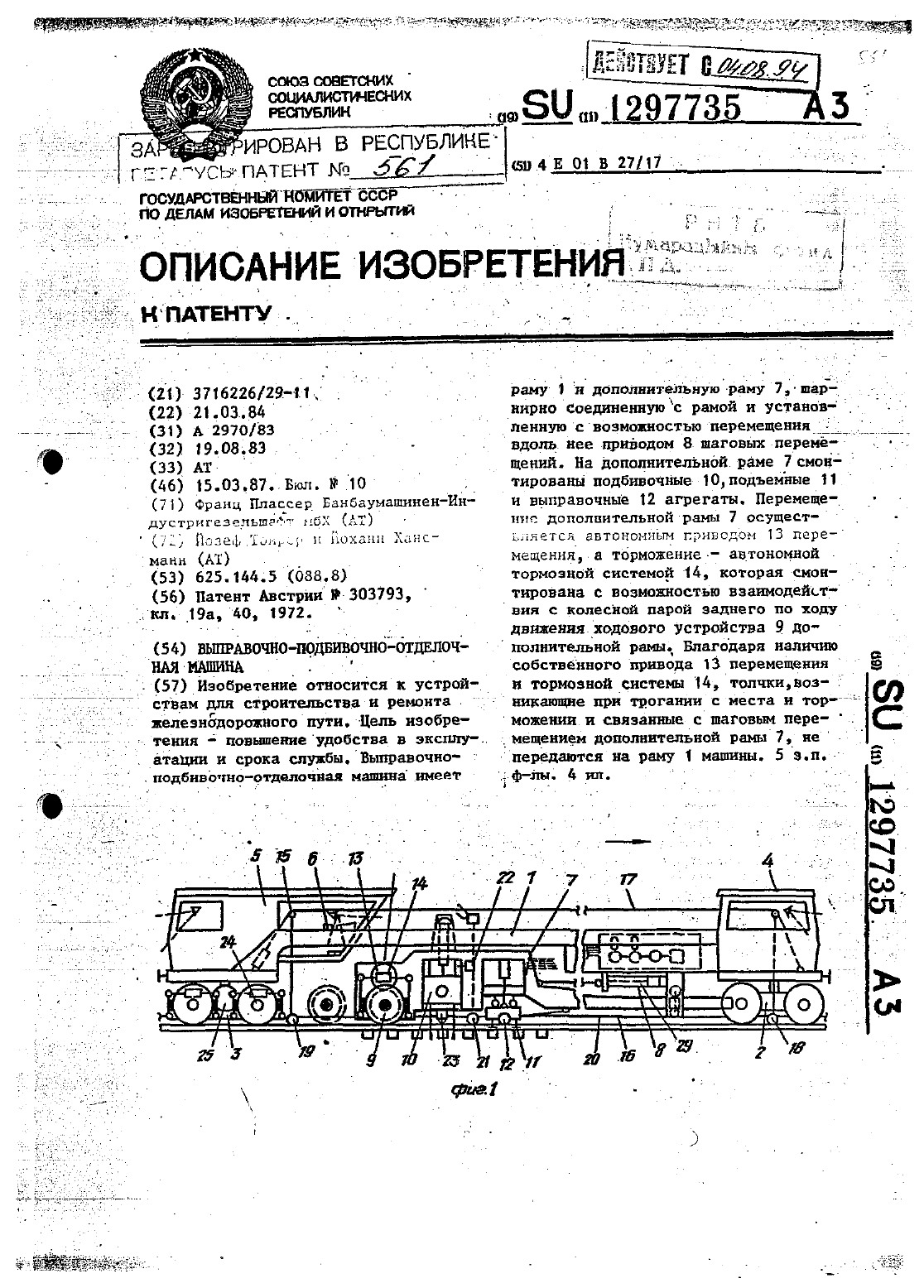
...хордовой-проволоки 17, передний конец которой посредством щупа 18 перемещается по неоткорректированномуй рельсу, а ее задний конец посредст 1 Аг вом другого щупа 19 перемещается пое 5 ТРУБОПРОЕОД 30 и открыты запорныйуже.откорректированному рельсу. Рихч клапан 31 ставится под давление не. топочная система 16 отсчета координат 5 ПОСРЗДСТВВННО ИЗ ГИДРЗВЙНЧЕСКОГО включает в себя хордОВУЮ проволоку трубопровода 32 привода 13...
Передвижная выправочно-подбивочная машина
Номер патента: 562
Опубликовано: 30.06.1995
Авторы: Йоханн Хансманн, Йозеф Тойрер
МПК: E01B 27/17
Метки: машина, передвижная, выправочно-подбивочная
Текст:
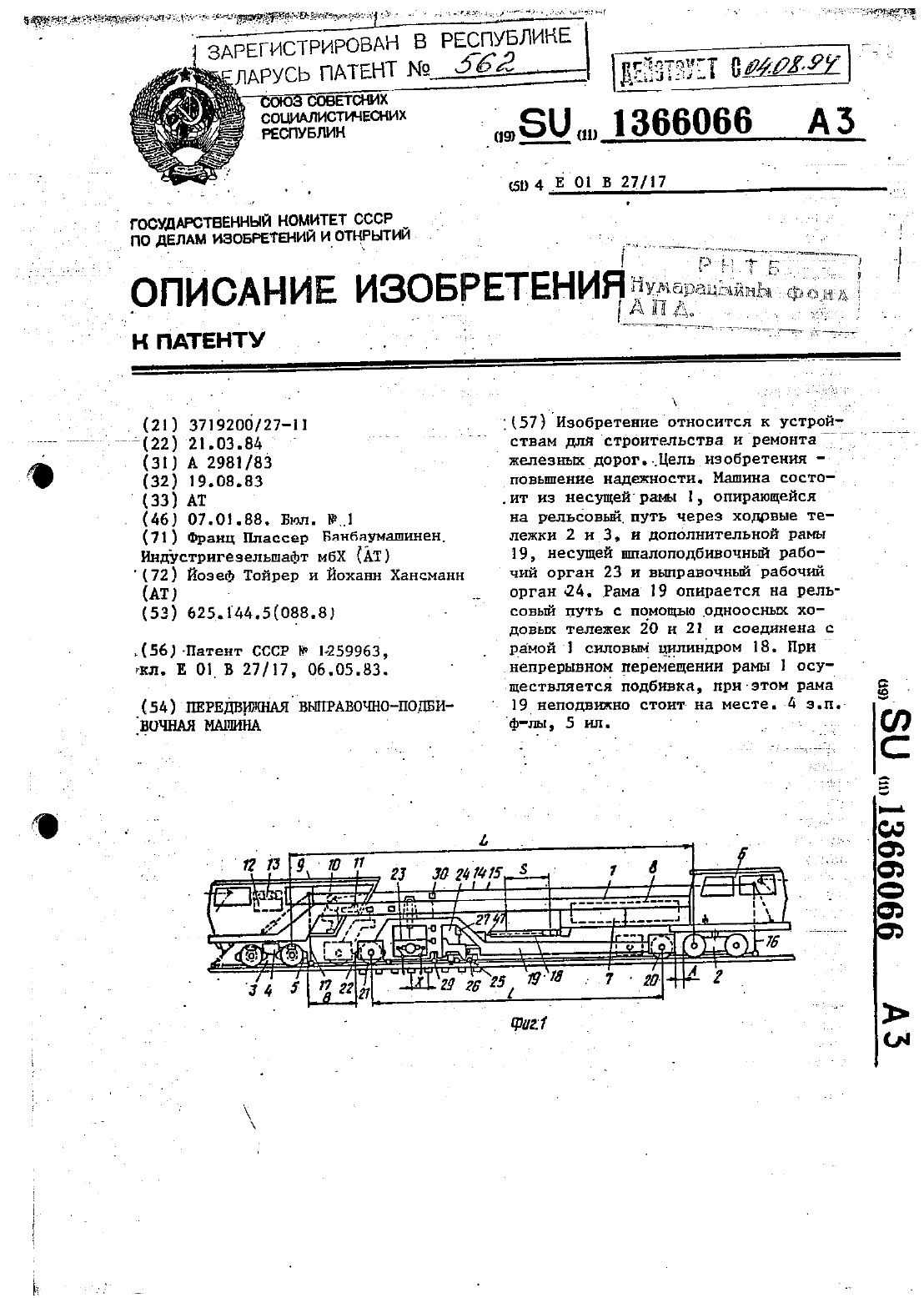
...жен подиинаемый и спускаемый по нап- двигатель 32, ввшолненньй, например. равляющим приводом подъема шпалопод в виде многоцилиндрового дизельного бнвочный рабочи орган 23, перед двигателя, соедиенньй с ним генеКТ 0 Пым смонтированы выправочныйра- 55 ратор 33, гидравлический насос 34 с б 0 ЧН орган 24 сподъемными ролико . подключенным к нему ресивером 35 н выми захватами 25 и рихтовочнми ро- соединенный с двигателем 32 компреслнкнмн 25...
Передвижная выправочно-подбивочная машина
Номер патента: 558
Опубликовано: 30.06.1995
Автор: Йозеф Тойрер
МПК: E01B 27/17
Метки: выправочно-подбивочная, передвижная, машина
Текст:
...0 РУдована дополнительным устройствами,согласно которому рама 4 смонтиро-пути, который через каждый сантиметрдОна раме 4 примерно по осн симмет- Комбинированная базовая система- рин шалоподбивочного рабочего орга- (фиг.5) пригодиа. например. для УС на 7. Этот датчик 40 ведет себя нейт- .тановки в выправочно-подбивочную ма сительное перемещение между рамой 4КОТОРЫВ ОбеСПеЧНВдЮТ аВТНаТЧеСКОе Щего положения индуктивный датчик 40 УПРЕВПЕНИЕ...
Предыдущий патент: Способ очистки газа от сернистых примесей
Следующий патент: Способ получения азоловых соединений или их кислотно-аддитивных солей, их простых или сложных эфиров
Случайный патент: Способ волочения проволоки с наложением ультразвуковых колебаний