Выправочно-подбивочно-отделочная машина
Текст
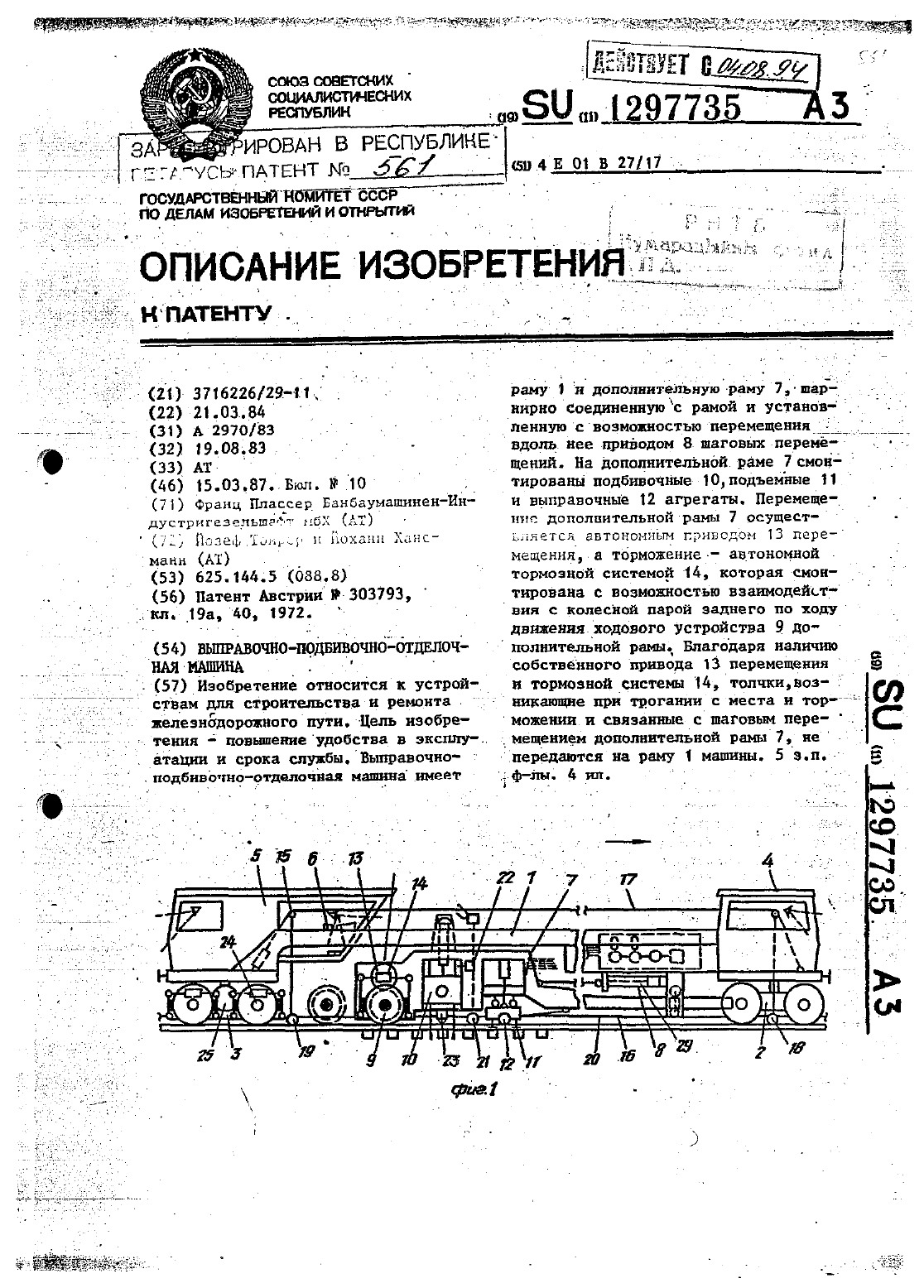
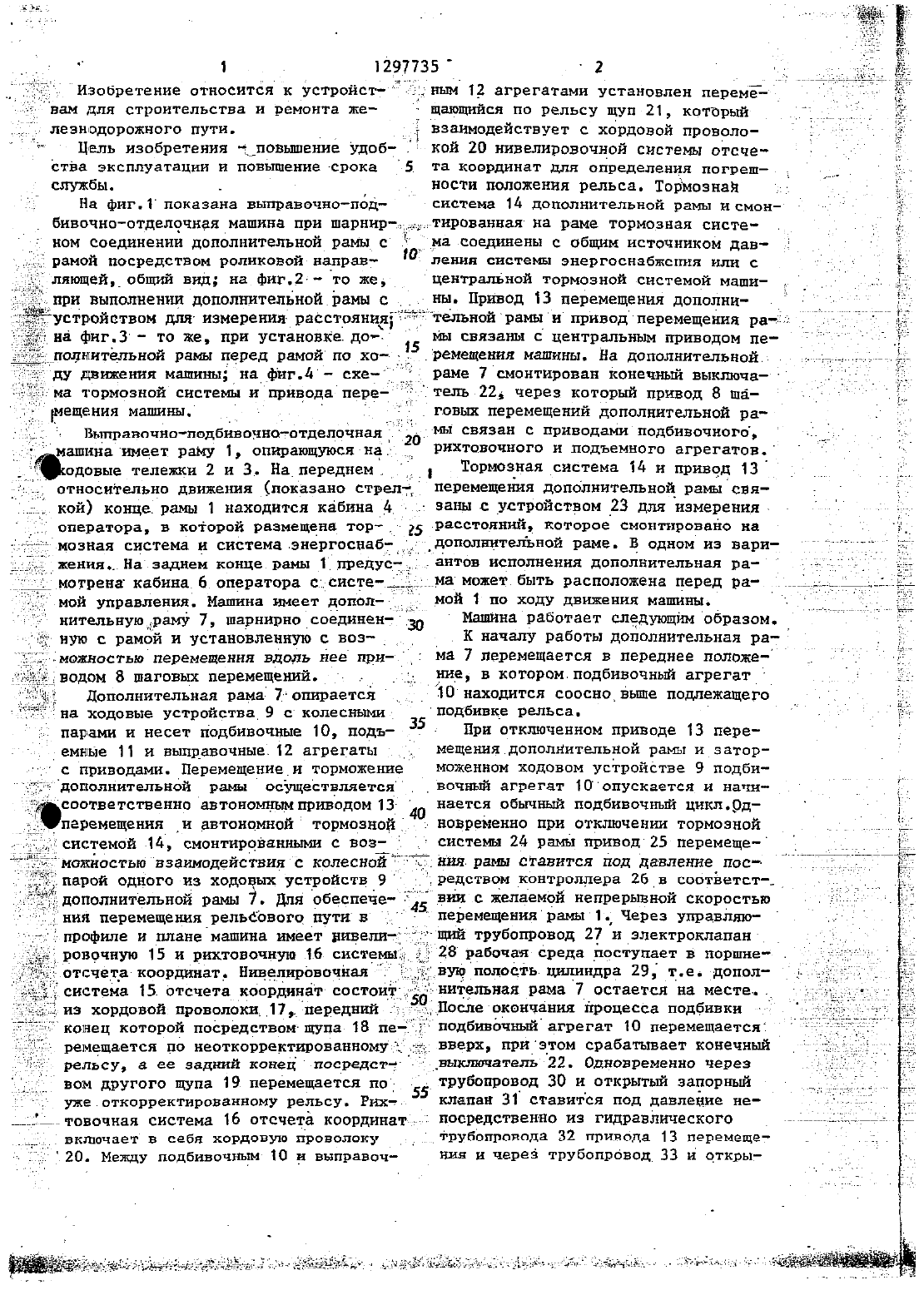
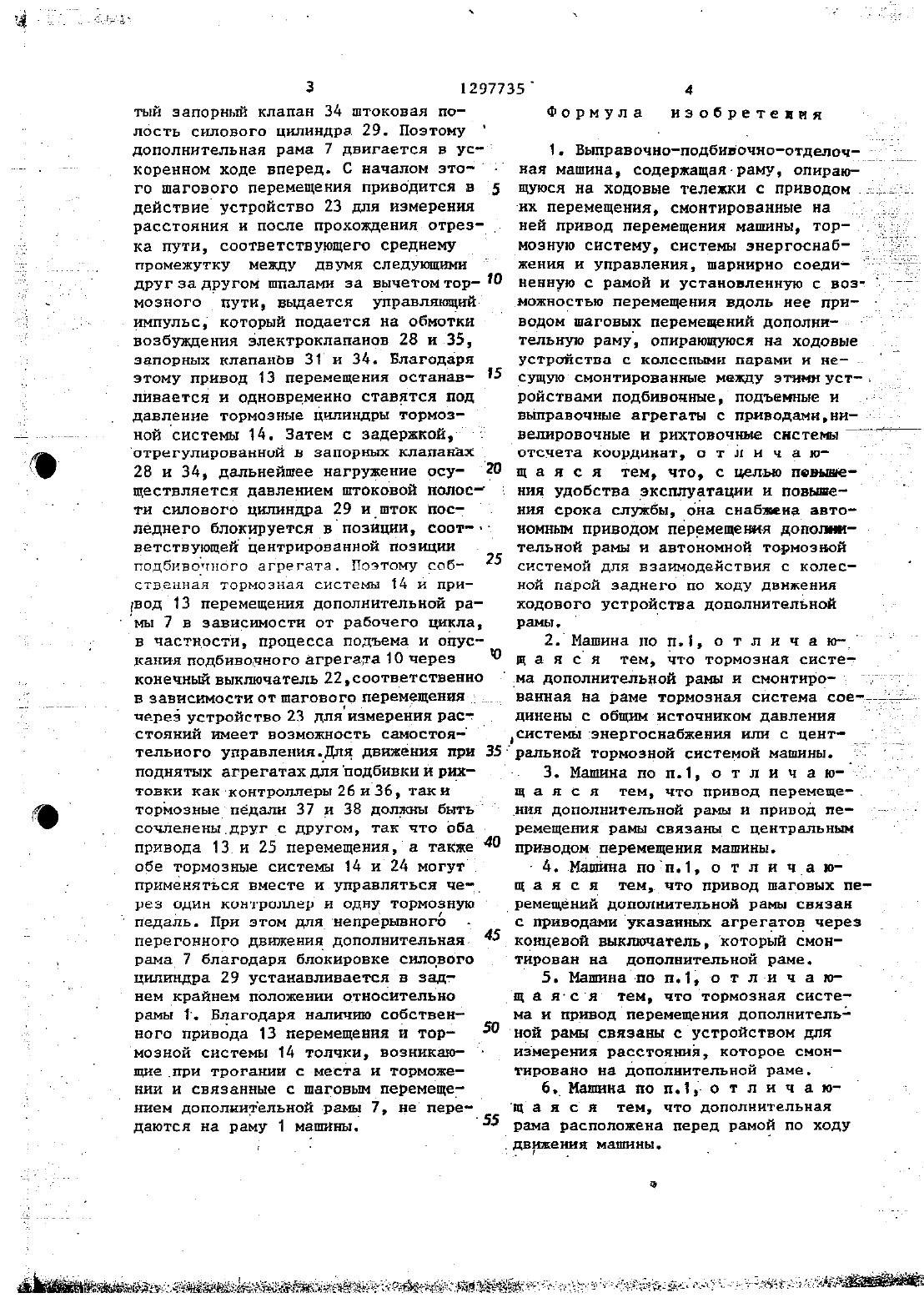
д ждт 2 ИРОБАН В РЕПУБЛИЕ гхэгдджсья ПАТЕНТ не 56 / - госуддгственнайнсгпйттатсббб 7 л . по ДЕЛАМ нзовгегеъмй иотнгытт . сн-(21-)- з 71 в 22 в/29 п . рамп н дополнитепъднулсг-рат Ъ-шаач И (22)н 21 о 3 ва Д Е ннрно еоеднненнУЮс рамой и-установ- -(31) А 2970183 . 1 пенную свозможностъю перемещениядч . (З 2 19.08.83 . - - идиш нее приводом 8, шаговых-перепет Ф (33) Ат. щений. на допоцнителъной раме 7 смон 4 о (46) 15.03.87 Бюл. Н 10 стированы подбивочньхе 10 подъемные 11(71) Франц плаосер Банбауыашинендин- н выправочные 12 агрегаты. Перенеще- дустригезедьшеч но) (АТ - пне дополнительной-раю 7 осущесчш 7 (292) 1 озеьь 1 оц..г и оханн Хвнс- ьллетсн автономнЬщ приводом 13 пере мацы (Ат) мещеннгде торможение автономнойД кл. 195 до, 1972. вия с кодесной парой заднего по ходу - двгшениэъдкодового Устройства 9 до (54) вытшАвошо-подвнночнбдотдвпоч целительной рамъц Благодаря наличиюеНАЯ. . собственного привода 13 перемещения о 1(57)Изобре 1 епие относится к устрой-кг и тормозной системы 14, дгопчкищоз- Г с ствдм для строительства И Ремонта никающие при трогании с места и тортжелезнбдорожногопутн. Цель нзобре- вложении и связанные с шаговым пере- тез-кия 4 повышение удобства в эксплуч. д падением дополнителнной рамы 7, не. еташш и срока службы. Ъыправочно- т дпередаются на раму 1 машины. 5 з.п.Изобретение относится н устройстеец оным 12 агрегатами установлен перемд вам для строительства и ремонта жеч 1 щающйся по рельсу щуп 21, который лезнодорожного пути. взаимодействует с хордовой проволо Цель изобретения 1 повышение удобе 71 кой 20 нивелировочной систеы отсче ства эксплуатации И повышение-срока 5 та координат для определения погреш службы. . ности положения рельса. Тормознаябивочноотделочнаямашина при шарнир тированная на раме тормозная систеч ном соединении дополнительной рам с.Ана соединены с общим источником даврамой посредством роликовой направт 1 пения системы энергоснабжения или с ляющейобщий вид на фиг.2- то же, центрапънои тормозной системой маши.при выполнении дополнительнойрамы сны. Привод 13 перемещения дополниустройством для измерения-е расстоянии А дна фиг.3 - то же, при установке.до- мы связаны с центральны приводом пееполннтельной рамы перед рамой по до у д Дремещения машины. На дополнительной.-ду движения машины нафтг.д скат раме 7 смонтирован конечый выключа дна тормозной системы И привода пере телъ 22, через который привод 8 щадмещення машин. говы перемещений дополнительной ра Выправочноподбивочночотделочная. 2 ЬМЫ СБЯЗЗН С ПРИВОДЗМЫ П 0 дбИВ 0 ЧНРбмашинанмеет раму 1, опирающуюся на Щ рихтовочного и подъемного агрегатов. Фоновые тележки 2 и 3,. На переднем д. ТОРМОЗНЫЕ СИСТЕМЕ 14 И ПРИВФД 13 относительно двиения (показано стрелЦ перемещена дополнительнои рамы свякой) концеррамь 1 находится кабина Аэаны с Устройством 23 для измерения оператора, в которой размещена тор г 5 расстояний, которое смонтирорано на мозная система и система энергоснабт-д 0 П 0 ЛНИТВЛЪН 0 й РаМе- В ОДНОМ ИЗ варит женняНазаднем конце раы 1 предусд атв и 9 плнед дополнительная ра мотрена кабина 6 оператора ссисте, Ма может быть Расположена перед рамой управления. Машина имеет допол МОЙ 1 ПО ХОДУ движения машины.тельной рамЫи привод перемещения рада И ьТ Инительнуюдраму 7, шарнирно соедннент 3 д Машина работает следующим образом. ную с рамой и установленную с воз К НЗЧЗЛУ Рабдты дополнительная раможностьюперемещения вдоль нее при- Ма 7 перемещается в переднее положе о водом 8 шаговых перемещений. . . дд не, в котором.подбивочный агрегат-на кодовые устройства 9 с колесными подбивце рельсапарами и несет подбивочные 10, подъ-35- При отключенном приводе 13 переемные 11 и выправочные.12 агрегаты . д мещеня дополнительной рамы и затор с приводами. Перемещеииеи торможение моженном ходовом устройстве 9 подбидополнительиой рамы осуществляется. Вочны агрегат 100 пУскается и начи соответственноавтономнымприводом 1 З- кается Обычный Пбдбивочны ЦИкп.9 дперемещения и автономной формовкой - новременно при отключении тормозной-системои.14, смонтировеннм с воз емакностьювзаимодействияс колесноЙ 1 парой одного из ходоеых устройств 91 ополнительной рамы 7. Для обеспене ния перемещения рельсового пути в профиле и плане машина имеет нивели ровочную 15 и риктовочнуш 16 системы отсчета координат, Ниелировоннан.иэ хордовой-проволоки 17, передний конец которой посредством щупа 18 перемещается по неоткорректированномуй рельсу, а ее задний конец посредст 1 Аг вом другого щупа 19 перемещается пое 5 ТРУБОПРОЕОД 30 и открыты запорныйуже.откорректированному рельсу. Рихч клапан 31 ставится под давление не. топочная система 16 отсчета координат 5 ПОСРЗДСТВВННО ИЗ ГИДРЗВЙНЧЕСКОГО включает в себя хордОВУЮ проволоку трубопровода 32 привода 13 перемещет 2 О. Между подбивочным 10 и выправоч е Нин И через ТРУ 50 ПрОвод 33 и откры системы 24 рамы привод 25 перемеще ния.рамы ставится под давление пост редством контроллера 2 бв соответст вин с желаемой непрерывной скоростью перемещениярам 1 Через управлню Щй трубопровод 2 излектрокпапан 28 рабочая среда поступает в поршневщлолоеть шшиндра 29 т.е. дополНитедъная рама 7 остается на месте После окончания процесса подбивки подбивочный агрегат 10 перемещаетсятый запорный клапан 34 штоковая полость силового цилиндра 29. Поэтому дополнительная рама 7 двигается в ускоренном ходе вперед. С началом этого шагового перемещения приводится в 5 действие устройство 23 для измерения расстояния и после прохождения отрезка пути, соответствующего среднему промежутку между двумя следующими друг за другом шпалами за вычетом тор- Ю мозного ,пути, выдается управляющий импульс, который подается на обмотки возбуждения злектроклапанов 28 н.35 запорных клапанов 31 и 34. Благодаря этому привод 13 перемещения останав- 5 ливается и одновременно ставятся под давление тормозные цилиндры тормоз ной системы 14. Затем с задержкой,отрегулированной в запорныхклапанах 28 и 34, дальнейшее нагружение осу- 0 ществляется давлением штоковой полости силового цилиндра 29 и шток пос- леднего блокируется в позиции, соот ветствующей дентрированной позиции л поцбивопного агрегата. Поэтому соб 25 ственная тормозная систем 14 и придвод 13 перемещения дополнительной ра мы 7 в зависимости от рабочего цинла, в частности, процесса подъема и опускания подбивонного агрегата 10 через конечныйвыключатель 22,соответственно в зависимости от шагового перемещения Е черезустройство 23 дляивмерениярас- стояний неет возможность самостояд1. Выправ 0 чно-подбивоЧНо-отделоч ная машина, содержащая-раму, опирающуюся на ходовые тележки с приводом а янх перемещения, смонтированные на ,ней привод перемещения машины, тормозную систему, систеы энергоснабпения и управления, шарнирно соедн- НЕННУЮ С рамой И УСТЗНОБЛЕННУЮ С ВОЗ е можностью перемещения вдоль нее прн 5 водом шаговых перемещений дополни тельную раму, опирающуюся на ходовые устройства с колесными парами н несущую смонтированные МЕЖДУ этиинуст-. ройствами подбивоиные,подъемные и выправочные агрегаты с приводамн,нивелировочные Н РИХТОВОЧНЫЕ СИСТЕМЫ 7 ма дополнительной раы и смонтиротельного управленияддпя движения при 35поднятых агрегатах для подбивки и рихтовки как контроллеры 26 иЗб, таки тормозные педали 37 и 38 должны быть сочлененыдруг с другом, так что оба привода 1 Зи 25 перемещения, а также 40 обе тормозные системы 14 и 24 могутн применяться вместе и управляться нерез один контроллер И одну тормознуюпедаль. При этом для непрерывного перегонного движения дополиительная- 45 рама 7 благодаря блокировке силового цилиндра 29 устанавливается в зад нем крайнем положении относительнорамы 1 ц Благодаря наличию собственного привода 13 перемещения и тор мозной системы 14 толчки, возникающие при трогании с места И торможении и связанные с шаговым перемещением дополнительной рамы 7, непере даются на раму 1 машины.отсчета координат, о т л И ч а ющ а я с я тем, что, с целью певыше ния удобства эксплуатации и повпе ния срока службы, она снабжена автономнм приводом перемещения дополнительной рамы и автономной тормозной системой для взаимодействия с колесной парой заднего по ходу движения ходового устройства дополнительной рамы.ванная на раме тормозная система соед динены с общим источником давления системы энергоснабжения или с центральной тормозной снстемой машины.3. Машина по п.1 о т л и ч а ю-7 Щ а Я С Я ТЕМ, ЧТО ПРИВОД перемеще-. ННН ДОПОЛНИТЕЛЬНОЙ рамы Н привод перемещения рам связаны с центральны приводом перемещения машины.4. Машина по 7 н.1, о т л и ча ю щ а я с я тем, что привод шаговых пе рремещений дополнительной рам связанс приводами указанных агрегатов через концевой выклчатель, который смонтирован на дополнительной раме.5. Машина по п.1 о т леи ч а ю йщ а НСЯ ТЕМ, ЧТО тормозная систе ма и привод перемещения дополнитель ной рам связаны с устройством дляизмерения расстояня которое смонтировано на дополнительной раме. 6. Машина по п.1, о т л н ч а ю ща я ся тем, что дополнительнаярама ЭЗСПОПОЖСНЗ перед РЗМОЙ ПО ХОДУ..ц- - Заказ 802/65 1 тираж 489 д Подписное ВНИИПИ Государственного комзгтета СССР к поделам изобретений и открытий
МПК / Метки
МПК: E01B 27/17
Метки: выправочно-подбивочно-отделочная, машина
Код ссылки
<a href="https://by.patents.su/4-561-vypravochno-podbivochno-otdelochnaya-mashina.html" rel="bookmark" title="База патентов Беларуси">Выправочно-подбивочно-отделочная машина</a>
Выправочно-подбивочно-отделочная машина
Номер патента: 556
Опубликовано: 30.06.1995
Авторы: Гернот Бёк, Йозеф Тойрер
МПК: E01B 27/17
Метки: выправочно-подбивочно-отделочная, машина
Текст:
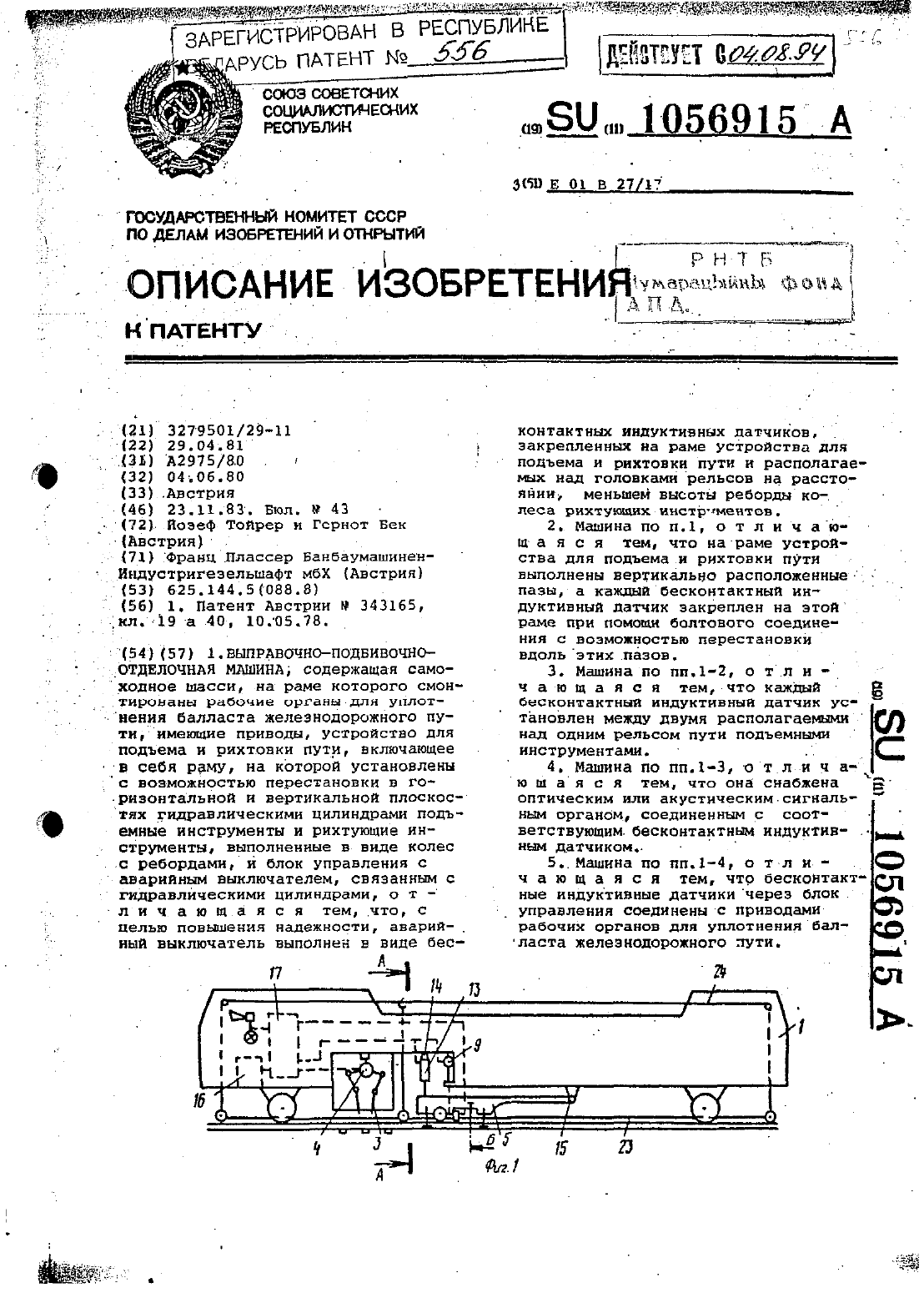
...машмнед содержащей самоходное шасси, на раме которогосмонтированы рабое чне органы для уплотнения балластавод, устройство для подъема н рнх товкн пути, включающее в себя раму,на которой установлены с возможнос трио перестановки в кэризонтапьной и вертикальной плоскостях гидравли ческими цилиндрами подъемные инстр 9 35машина содержит самоходное шасси 1, на раме 2 которого смонтированы рабочне органы 3 для уплотнения балласта...
Передвижная выправочно-подбивочная машина
Номер патента: 558
Опубликовано: 30.06.1995
Автор: Йозеф Тойрер
МПК: E01B 27/17
Метки: машина, передвижная, выправочно-подбивочная
Текст:
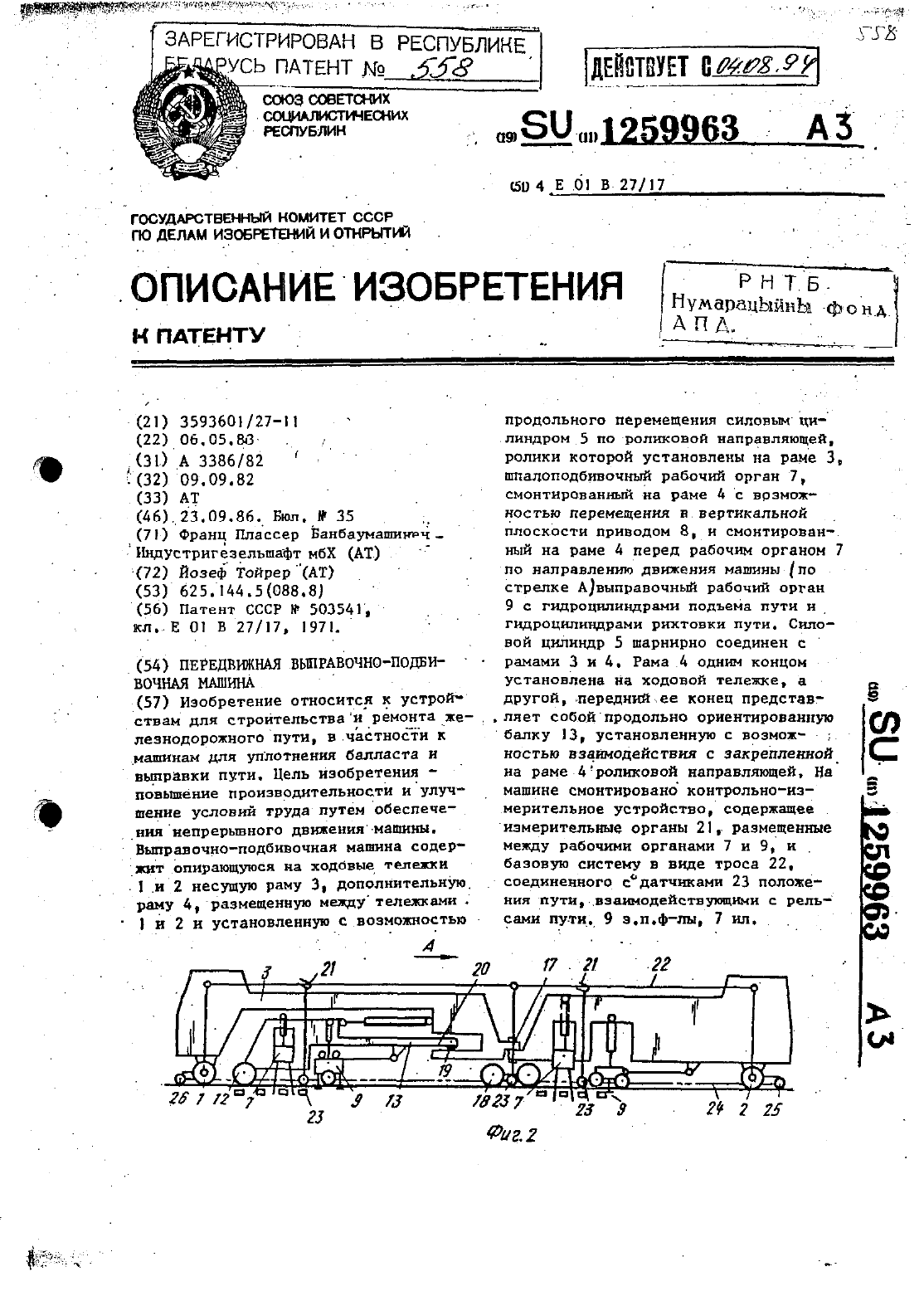
...0 РУдована дополнительным устройствами,согласно которому рама 4 смонтиро-пути, который через каждый сантиметрдОна раме 4 примерно по осн симмет- Комбинированная базовая система- рин шалоподбивочного рабочего орга- (фиг.5) пригодиа. например. для УС на 7. Этот датчик 40 ведет себя нейт- .тановки в выправочно-подбивочную ма сительное перемещение между рамой 4КОТОРЫВ ОбеСПеЧНВдЮТ аВТНаТЧеСКОе Щего положения индуктивный датчик 40 УПРЕВПЕНИЕ...
Машина для непрерывной укладки слоя песка между земляным полотном и слоем щебня железнодорожного пути
Номер патента: 523
Опубликовано: 30.06.1995
Авторы: Манфред Бруннингер, Йозеф Тойрер
МПК: E01B 27/02
Метки: полотном, песка, машина, слоя, слоем, земляным, щебня, непрерывной, укладки, между, пути, железнодорожного
Текст:
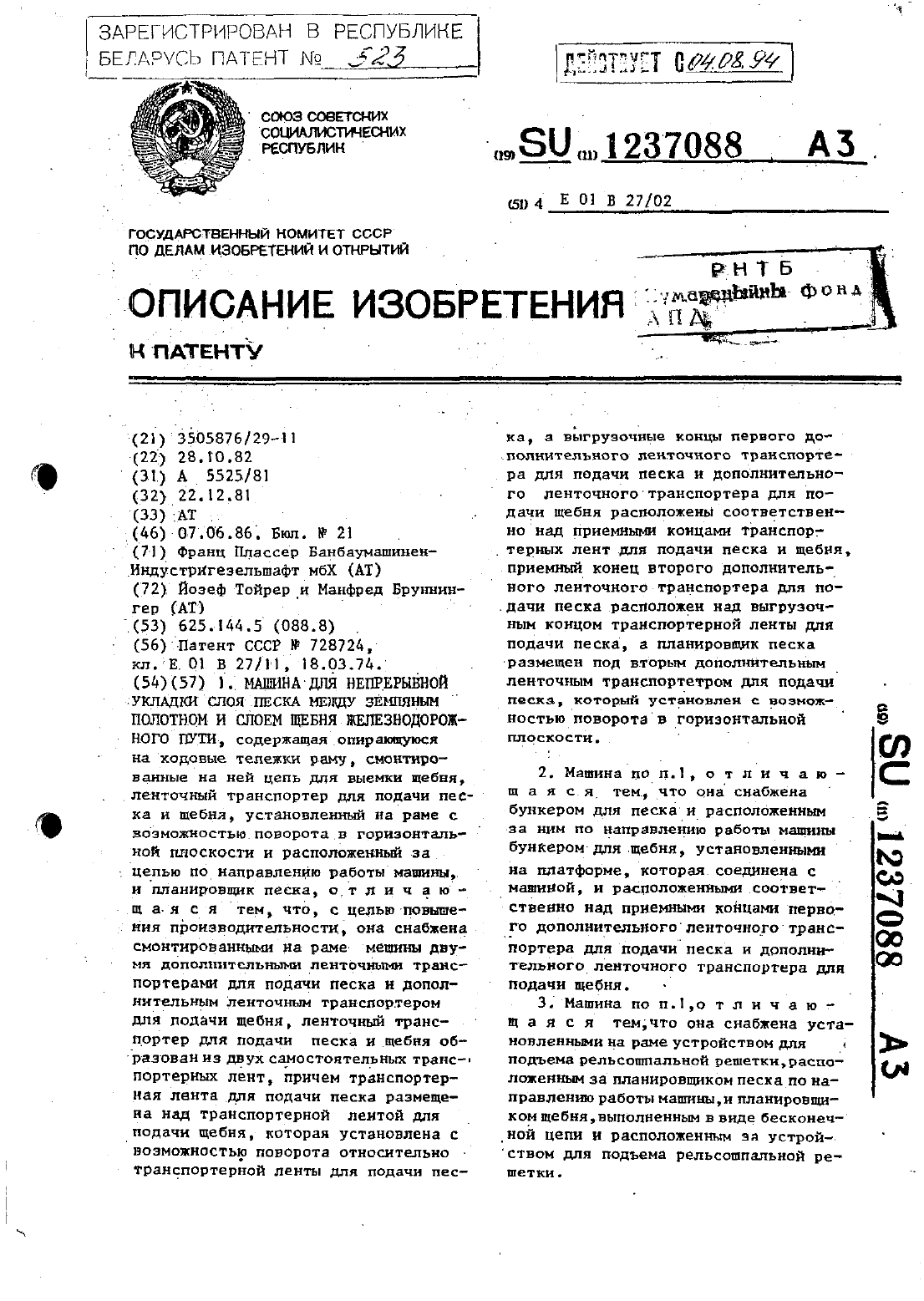
...части устройства 3 установлены вертикальные направляюще пластины 1.для Балласта. На раме 2 также смонтированы до попнительны ленточный транспортерд.12 для подачи песка н расположенныйпод ним дополнительны ленточный транспортер 13 для подачи Щебня. Наботы машины бункер 6 для щебня. Бункерн 5 н 16 расположены соответственно над приемными концами дополнительнога ленточного транспортера 12 для подачи песка н дополнительного ленточного...
Машина для выправки железнодорожного пути
Номер патента: 553
Опубликовано: 30.06.1995
Авторы: Йоханн Пихлер, Йозеф Тойрер
МПК: E01B 27/17, E01B 33/00
Метки: железнодорожного, пути, машина, выправки
Текст:
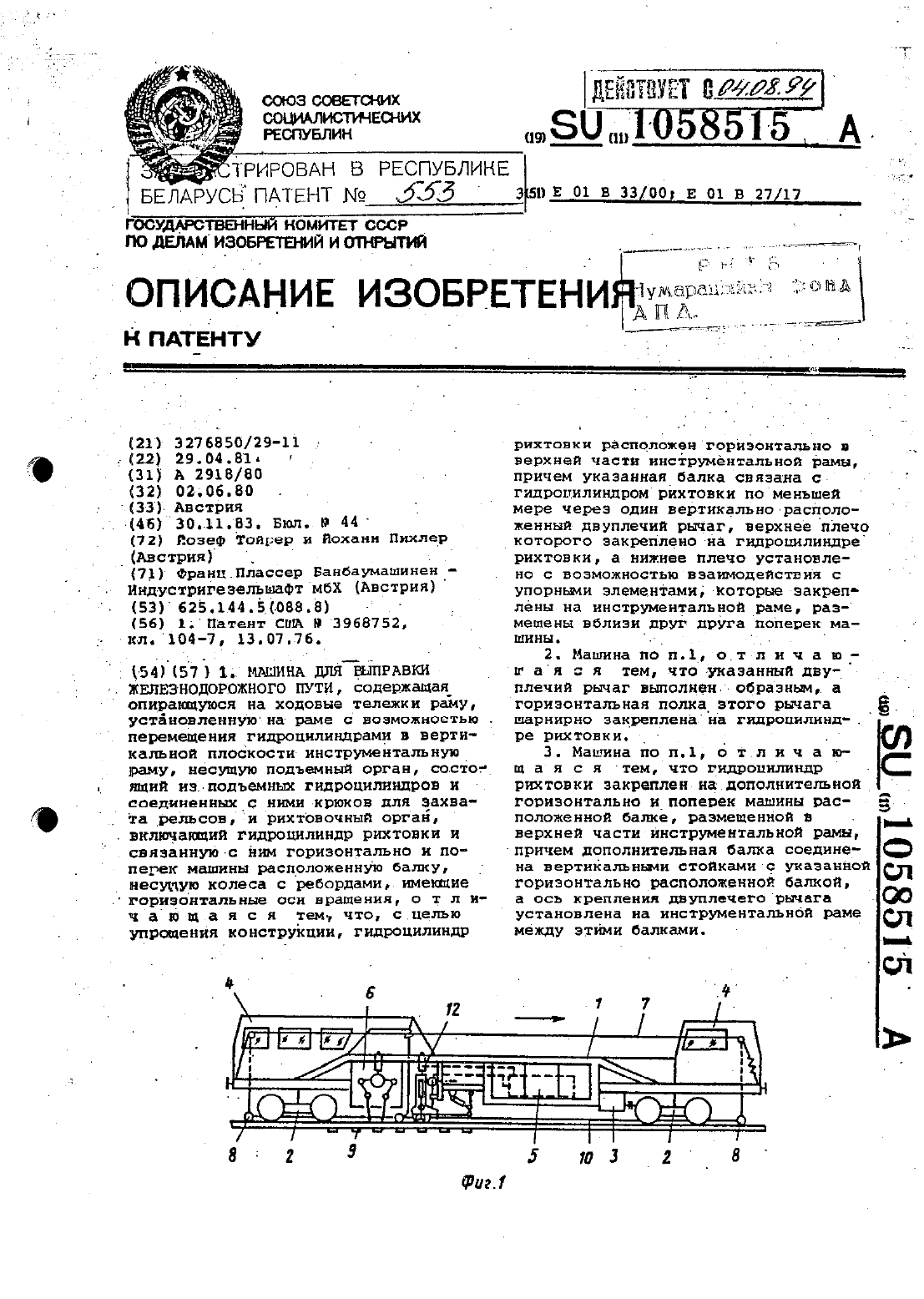
...стойками с указанНОЙ ГОРИЭОНТЕЛЬНО РЗСПОЛОЖЭННОЙ балкон. а ось крепления двуплечегорычага установлена на инструментальной раме между этими балками.На Фиг.1 изображена машина для выправки желеэнодорожногопути общий вид на фиг.2 подъемный ну рихтовочны органы в увеличенном масштабе, вид сбоку на фиг.3 Вид А На ФНг.2 наФиг.4 г вариант выполнения погъемного органа, вид сбоку на фиг.5 6 и 7 подъемныя и риктовочныи органы иекшие различные...
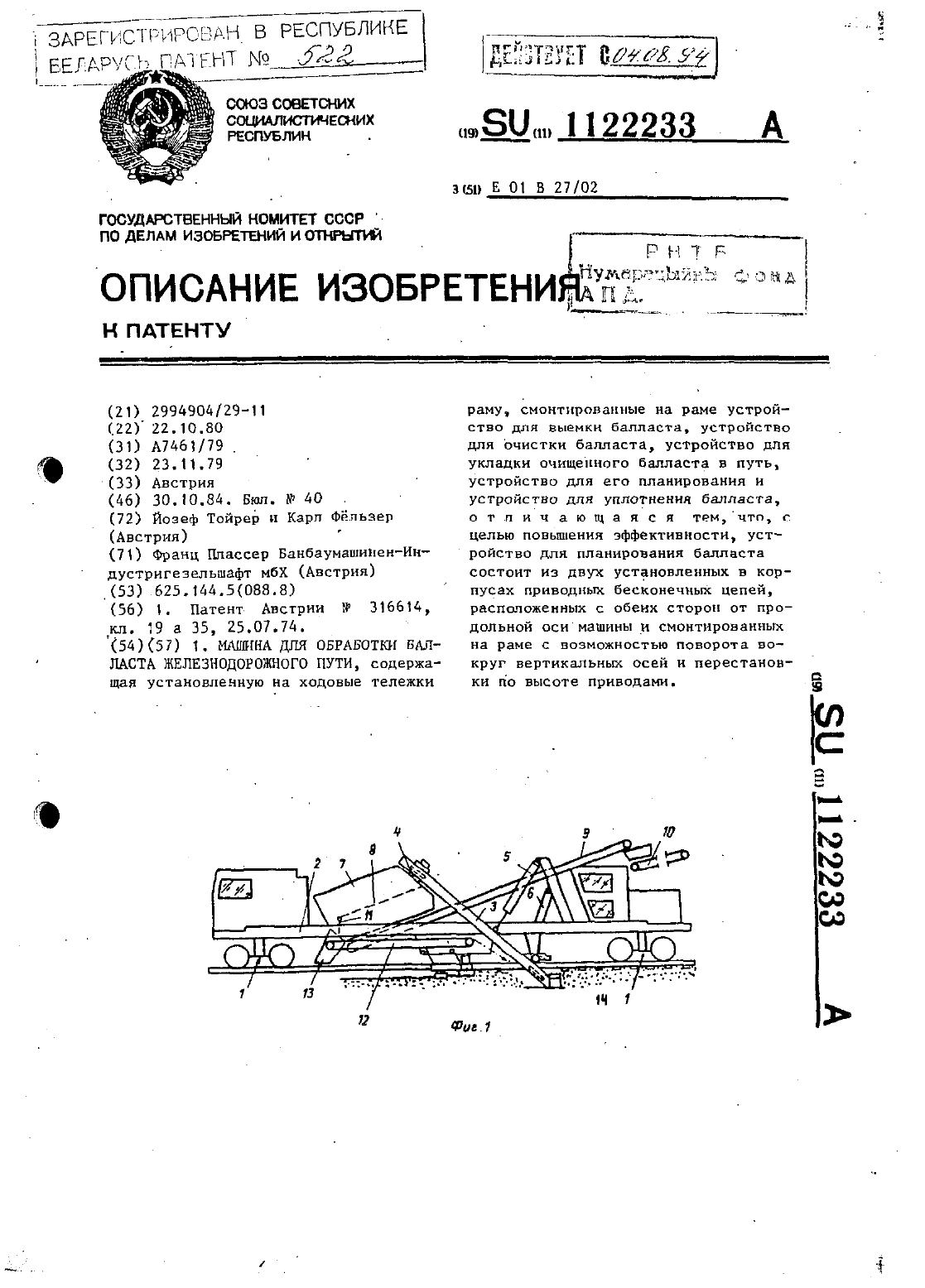
Машина для обработки балласта железнодорожного пути
Номер патента: 522
Опубликовано: 30.06.1995
Авторы: Йозеф Тойрер, Карл Фёльзер
МПК: E01B 27/02
Метки: балласта, железнодорожного, обработки, машина, пути
Текст:
...фиг.1 схематически изображена машина-для обработки балласта желез иодорожного пути, общий Вид Нафиг.2 устройство для планировании балласта и устройстводля-его Уплотнения, вид сбоку на фиг.3- разрез А-А на фиг.2. .Машина для обработки балласта железнодорожного пути содержит установленную на ходовые тележки 1 раму 2. На-раме 2 смонтировано устройство 3 для выемки балласта, состоя Ещее из бесконечной тяговой цепи,которая с помощью...
Предыдущий патент: Цепной транспортер для захватывания и транспортирования загрязненного балласта железнодорожного пути для щебнеочистительной машины
Следующий патент: Способ очистки газов от сернистых соединений
Случайный патент: Плотная яично-овощная питательная среда Кузнецова для выращивания микобактерий туберкулеза