Устройство управления линией визирования перископического прицела
Текст
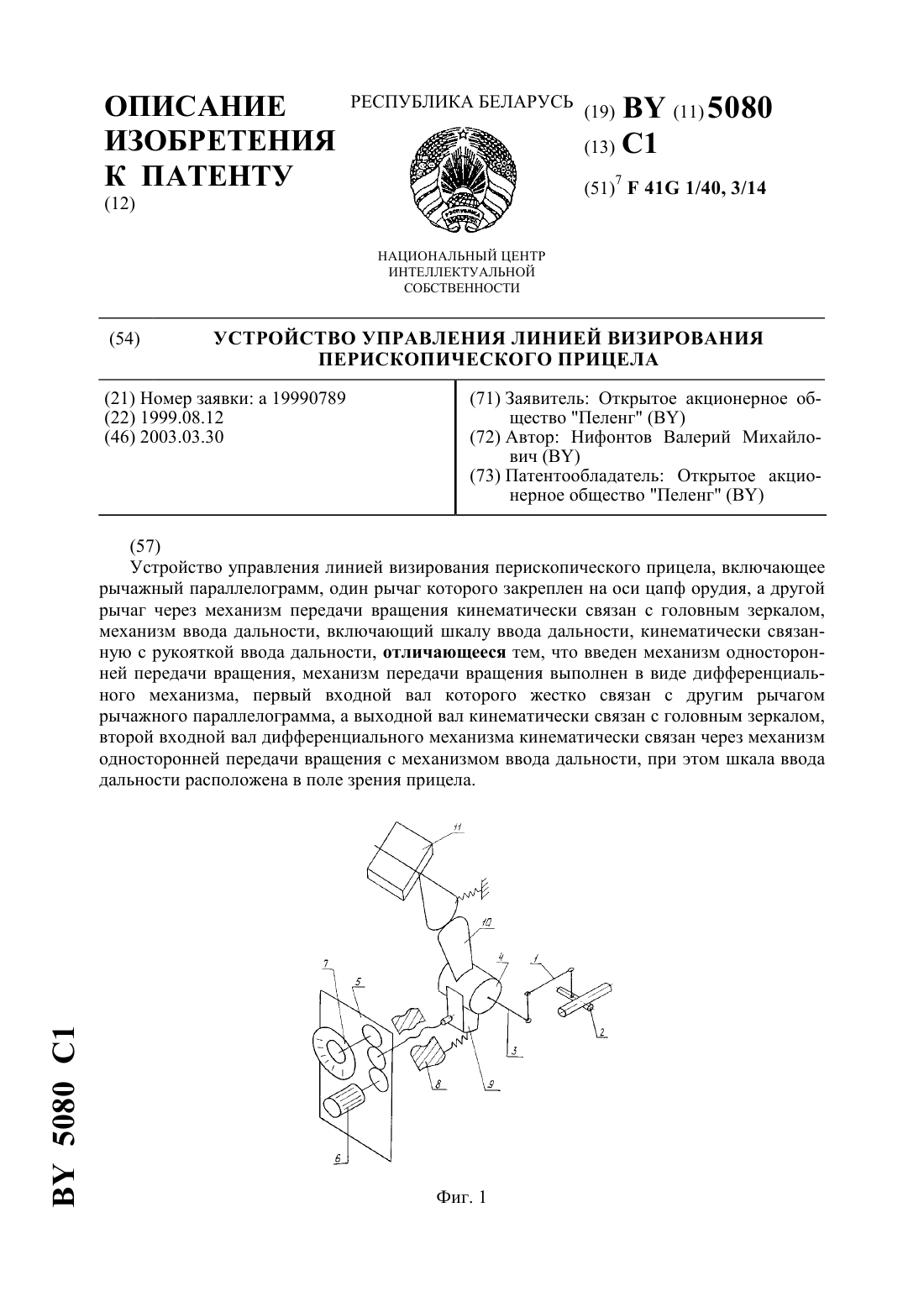
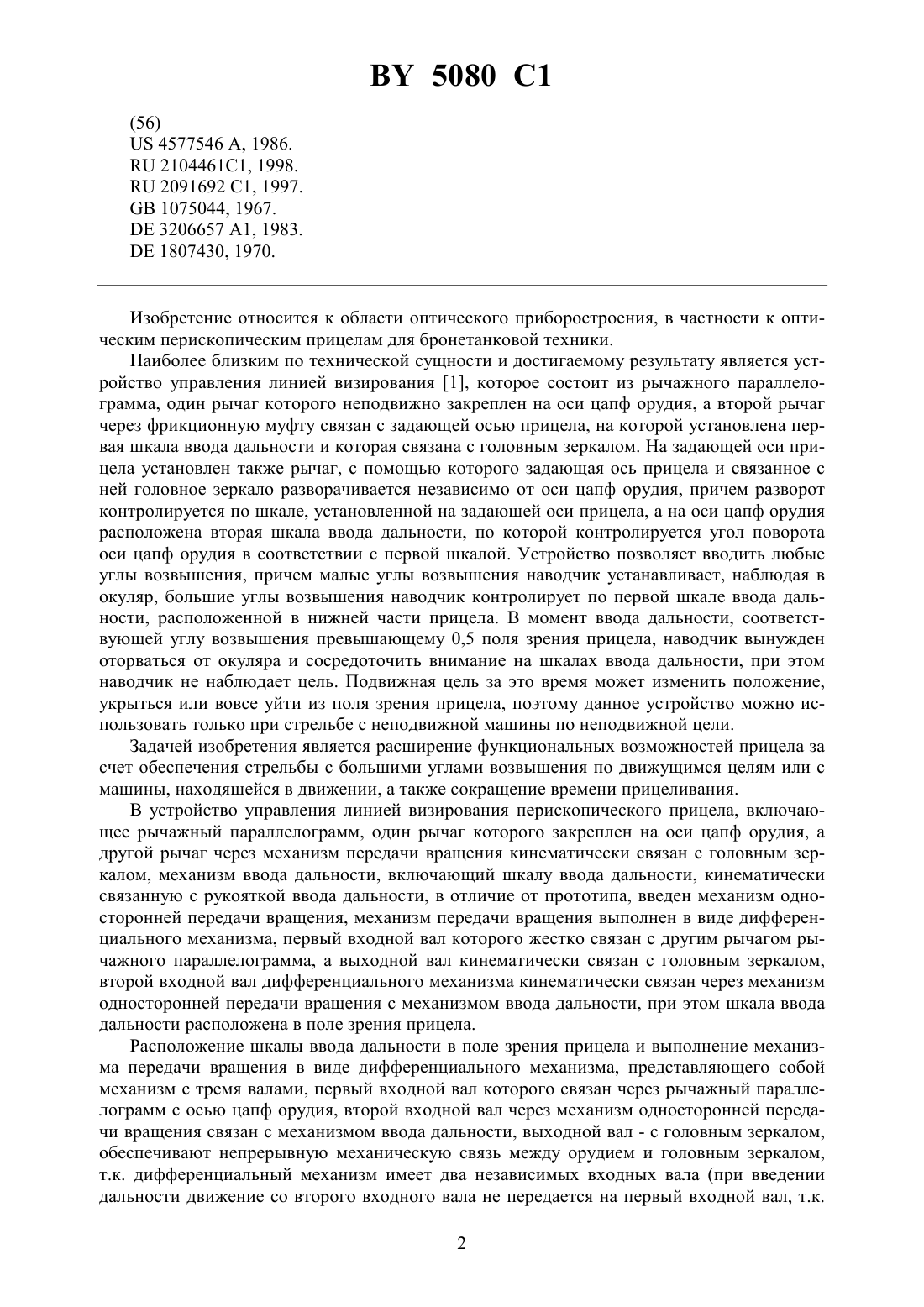
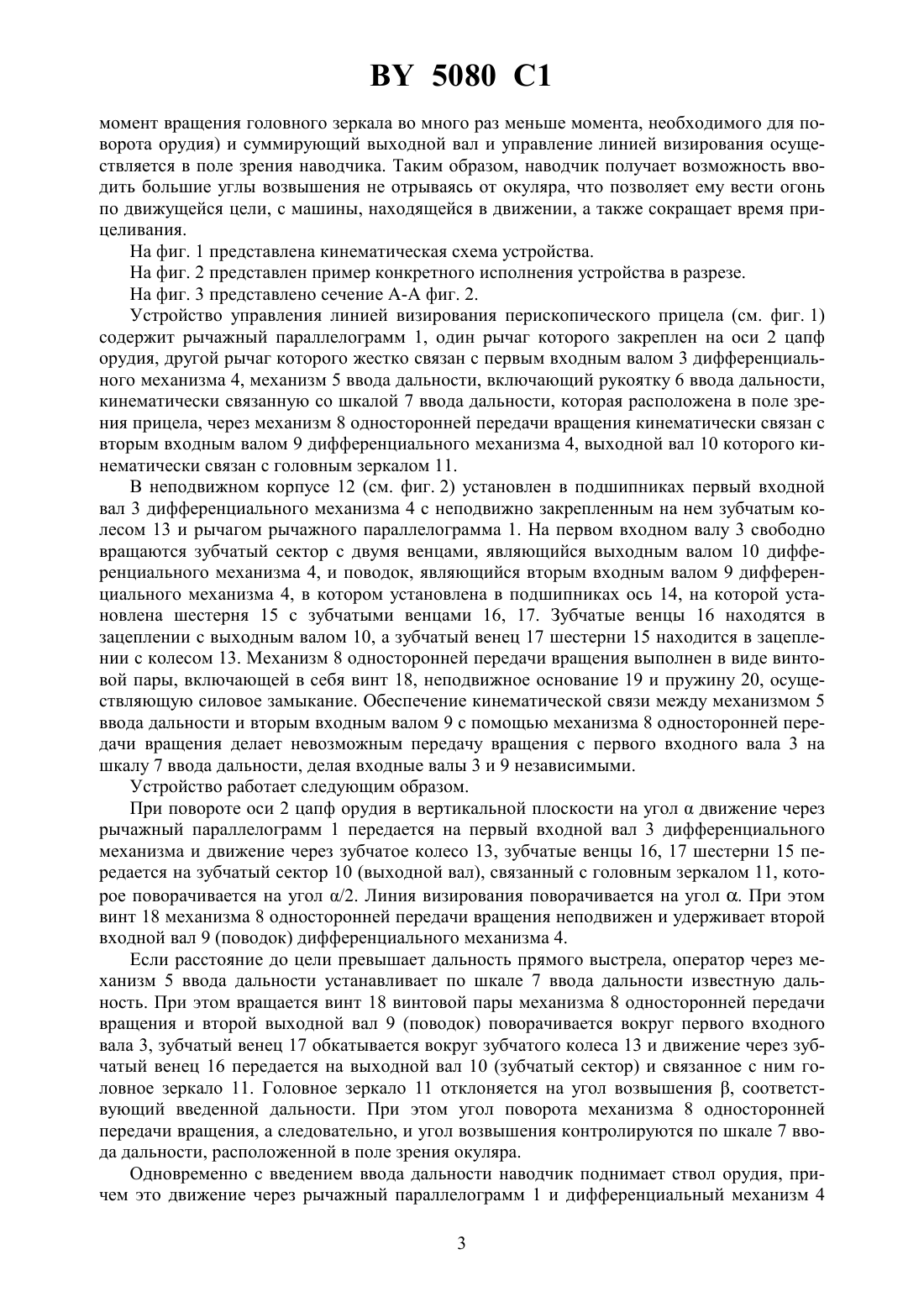
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО УПРАВЛЕНИЯ ЛИНИЕЙ ВИЗИРОВАНИЯ ПЕРИСКОПИЧЕСКОГО ПРИЦЕЛА(71) Заявитель Открытое акционерное общество Пеленг(72) Автор Нифонтов Валерий Михайлович(73) Патентообладатель Открытое акционерное общество Пеленг(57) Устройство управления линией визирования перископического прицела, включающее рычажный параллелограмм, один рычаг которого закреплен на оси цапф орудия, а другой рычаг через механизм передачи вращения кинематически связан с головным зеркалом,механизм ввода дальности, включающий шкалу ввода дальности, кинематически связанную с рукояткой ввода дальности, отличающееся тем, что введен механизм односторонней передачи вращения, механизм передачи вращения выполнен в виде дифференциального механизма, первый входной вал которого жестко связан с другим рычагом рычажного параллелограмма, а выходной вал кинематически связан с головным зеркалом,второй входной вал дифференциального механизма кинематически связан через механизм односторонней передачи вращения с механизмом ввода дальности, при этом шкала ввода дальности расположена в поле зрения прицела.(56)4577546 , 1986.21044611, 1998.2091692 1, 1997.1075044, 1967.3206657 1, 1983.1807430, 1970. Изобретение относится к области оптического приборостроения, в частности к оптическим перископическим прицелам для бронетанковой техники. Наиболее близким по технической сущности и достигаемому результату является устройство управления линией визирования 1, которое состоит из рычажного параллелограмма, один рычаг которого неподвижно закреплен на оси цапф орудия, а второй рычаг через фрикционную муфту связан с задающей осью прицела, на которой установлена первая шкала ввода дальности и которая связана с головным зеркалом. На задающей оси прицела установлен также рычаг, с помощью которого задающая ось прицела и связанное с ней головное зеркало разворачивается независимо от оси цапф орудия, причем разворот контролируется по шкале, установленной на задающей оси прицела, а на оси цапф орудия расположена вторая шкала ввода дальности, по которой контролируется угол поворота оси цапф орудия в соответствии с первой шкалой. Устройство позволяет вводить любые углы возвышения, причем малые углы возвышения наводчик устанавливает, наблюдая в окуляр, большие углы возвышения наводчик контролирует по первой шкале ввода дальности, расположенной в нижней части прицела. В момент ввода дальности, соответствующей углу возвышения превышающему 0,5 поля зрения прицела, наводчик вынужден оторваться от окуляра и сосредоточить внимание на шкалах ввода дальности, при этом наводчик не наблюдает цель. Подвижная цель за это время может изменить положение,укрыться или вовсе уйти из поля зрения прицела, поэтому данное устройство можно использовать только при стрельбе с неподвижной машины по неподвижной цели. Задачей изобретения является расширение функциональных возможностей прицела за счет обеспечения стрельбы с большими углами возвышения по движущимся целям или с машины, находящейся в движении, а также сокращение времени прицеливания. В устройство управления линией визирования перископического прицела, включающее рычажный параллелограмм, один рычаг которого закреплен на оси цапф орудия, а другой рычаг через механизм передачи вращения кинематически связан с головным зеркалом, механизм ввода дальности, включающий шкалу ввода дальности, кинематически связанную с рукояткой ввода дальности, в отличие от прототипа, введен механизм односторонней передачи вращения, механизм передачи вращения выполнен в виде дифференциального механизма, первый входной вал которого жестко связан с другим рычагом рычажного параллелограмма, а выходной вал кинематически связан с головным зеркалом,второй входной вал дифференциального механизма кинематически связан через механизм односторонней передачи вращения с механизмом ввода дальности, при этом шкала ввода дальности расположена в поле зрения прицела. Расположение шкалы ввода дальности в поле зрения прицела и выполнение механизма передачи вращения в виде дифференциального механизма, представляющего собой механизм с тремя валами, первый входной вал которого связан через рычажный параллелограмм с осью цапф орудия, второй входной вал через механизм односторонней передачи вращения связан с механизмом ввода дальности, выходной вал - с головным зеркалом,обеспечивают непрерывную механическую связь между орудием и головным зеркалом,т.к. дифференциальный механизм имеет два независимых входных вала (при введении дальности движение со второго входного вала не передается на первый входной вал, т.к. 2 5080 1 момент вращения головного зеркала во много раз меньше момента, необходимого для поворота орудия) и суммирующий выходной вал и управление линией визирования осуществляется в поле зрения наводчика. Таким образом, наводчик получает возможность вводить большие углы возвышения не отрываясь от окуляра, что позволяет ему вести огонь по движущейся цели, с машины, находящейся в движении, а также сокращает время прицеливания. На фиг. 1 представлена кинематическая схема устройства. На фиг. 2 представлен пример конкретного исполнения устройства в разрезе. На фиг. 3 представлено сечение А-А фиг. 2. Устройство управления линией визирования перископического прицела (см. фиг. 1) содержит рычажный параллелограмм 1, один рычаг которого закреплен на оси 2 цапф орудия, другой рычаг которого жестко связан с первым входным валом 3 дифференциального механизма 4, механизм 5 ввода дальности, включающий рукоятку 6 ввода дальности,кинематически связанную со шкалой 7 ввода дальности, которая расположена в поле зрения прицела, через механизм 8 односторонней передачи вращения кинематически связан с вторым входным валом 9 дифференциального механизма 4, выходной вал 10 которого кинематически связан с головным зеркалом 11. В неподвижном корпусе 12 (см. фиг. 2) установлен в подшипниках первый входной вал 3 дифференциального механизма 4 с неподвижно закрепленным на нем зубчатым колесом 13 и рычагом рычажного параллелограмма 1. На первом входном валу 3 свободно вращаются зубчатый сектор с двумя венцами, являющийся выходным валом 10 дифференциального механизма 4, и поводок, являющийся вторым входным валом 9 дифференциального механизма 4, в котором установлена в подшипниках ось 14, на которой установлена шестерня 15 с зубчатыми венцами 16, 17. Зубчатые венцы 16 находятся в зацеплении с выходным валом 10, а зубчатый венец 17 шестерни 15 находится в зацеплении с колесом 13. Механизм 8 односторонней передачи вращения выполнен в виде винтовой пары, включающей в себя винт 18, неподвижное основание 19 и пружину 20, осуществляющую силовое замыкание. Обеспечение кинематической связи между механизмом 5 ввода дальности и вторым входным валом 9 с помощью механизма 8 односторонней передачи вращения делает невозможным передачу вращения с первого входного вала 3 на шкалу 7 ввода дальности, делая входные валы 3 и 9 независимыми. Устройство работает следующим образом. При повороте оси 2 цапф орудия в вертикальной плоскости на уголдвижение через рычажный параллелограмм 1 передается на первый входной вал 3 дифференциального механизма и движение через зубчатое колесо 13, зубчатые венцы 16, 17 шестерни 15 передается на зубчатый сектор 10 (выходной вал), связанный с головным зеркалом 11, которое поворачивается на угол /2. Линия визирования поворачивается на угол . При этом винт 18 механизма 8 односторонней передачи вращения неподвижен и удерживает второй входной вал 9 (поводок) дифференциального механизма 4. Если расстояние до цели превышает дальность прямого выстрела, оператор через механизм 5 ввода дальности устанавливает по шкале 7 ввода дальности известную дальность. При этом вращается винт 18 винтовой пары механизма 8 односторонней передачи вращения и второй выходной вал 9 (поводок) поворачивается вокруг первого входного вала 3, зубчатый венец 17 обкатывается вокруг зубчатого колеса 13 и движение через зубчатый венец 16 передается на выходной вал 10 (зубчатый сектор) и связанное с ним головное зеркало 11. Головное зеркало 11 отклоняется на угол возвышения , соответствующий введенной дальности. При этом угол поворота механизма 8 односторонней передачи вращения, а следовательно, и угол возвышения контролируются по шкале 7 ввода дальности, расположенной в поле зрения окуляра. Одновременно с введением ввода дальности наводчик поднимает ствол орудия, причем это движение через рычажный параллелограмм 1 и дифференциальный механизм 4 3 5080 1 передается на головное зеркало 11, отклоняя его в сторону, противоположную той, в которую оно отклоняется под действием механизма 5 ввода дальности. Задача наводчика заключается в том, чтобы компенсировать поворот головного зеркала, вызываемый вводом дальности, обеспечить неподвижность головного зеркала (т.е. удерживать прицельную марку на цели) в течение всего времени, пока вводится дальность. По окончанию ввода дальности линия визирования будет направлена на цель, а ствол орудия поднят на угол , соответствующий дистанции до цели. Источники информации 1. Патент США 4577546, МПК 411/40 (прототип). Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
Метки: управления, устройство, визирования, перископического, линией, прицела
Код ссылки
<a href="https://by.patents.su/4-5080-ustrojjstvo-upravleniya-liniejj-vizirovaniya-periskopicheskogo-pricela.html" rel="bookmark" title="База патентов Беларуси">Устройство управления линией визирования перископического прицела</a>
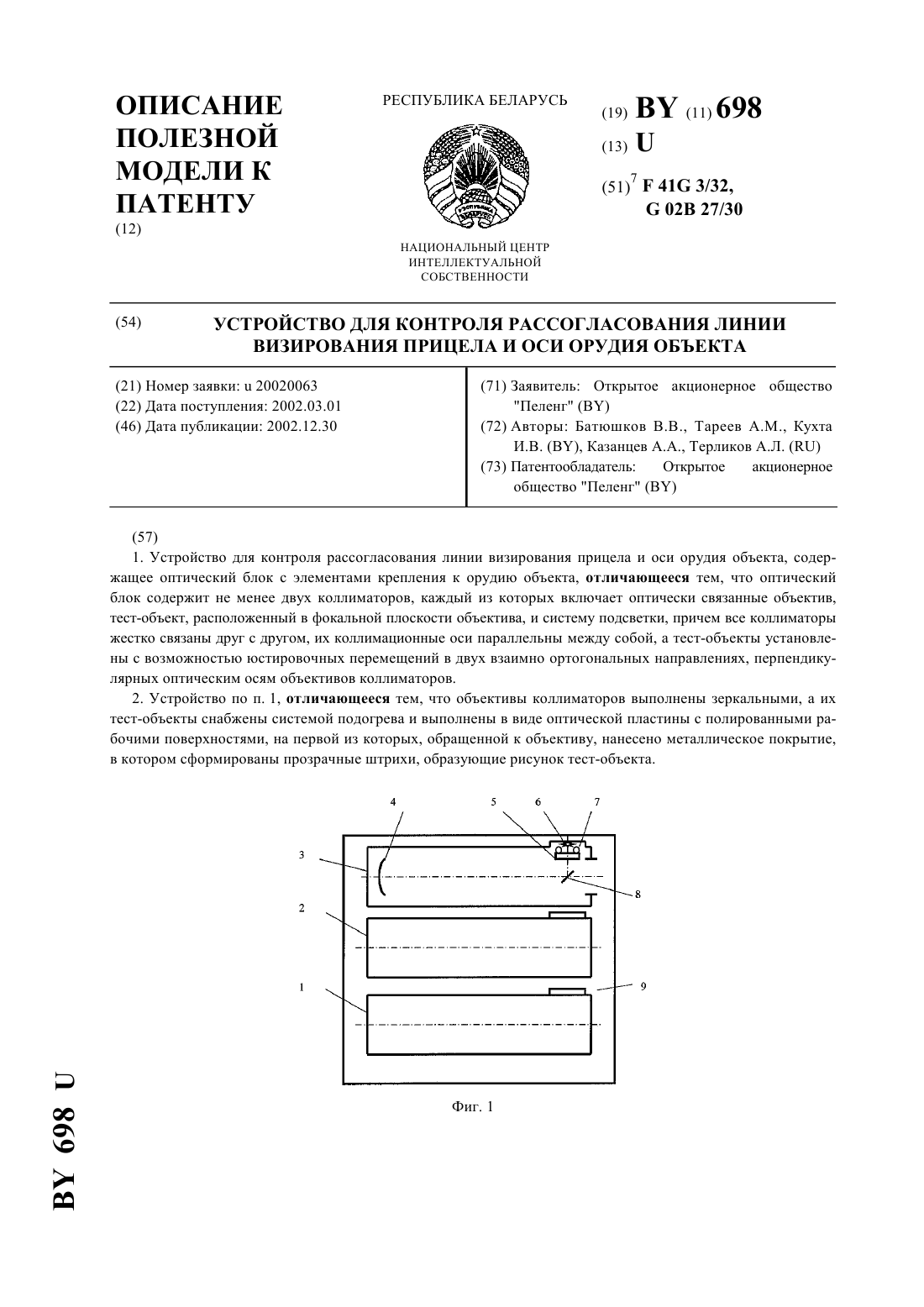
Устройство для контроля рассогласования линии визирования прицела и оси орудия объекта
Номер патента: U 698
Опубликовано: 30.12.2002
Авторы: Батюшков Валентин Вениаминович, Казанцев Анатолий Анатольевич, Кухта Игорь Владимирович, Тареев Анатолий Михайлович, Терликов Андрей Леонидович
МПК: G02B 27/30, F41G 3/32
Метки: визирования, орудия, устройство, рассогласования, контроля, оси, объекта, прицела, линии
Текст:
...возможность использования устройства для контроля прицелов, работющих в различных областях спектра, в т.ч. тепловизионного прицела, так как в этом случае коллиматоры включают тепловую марку. При этом тепловая и видимая глазом марки вследствие отсутствия хроматических аберраций зеркального объектива находятся в фокальной плоскости объективов коллиматоров. На фиг. 1 изображена принципиальная схема устройства, на фиг. 2 - пример выполнения...
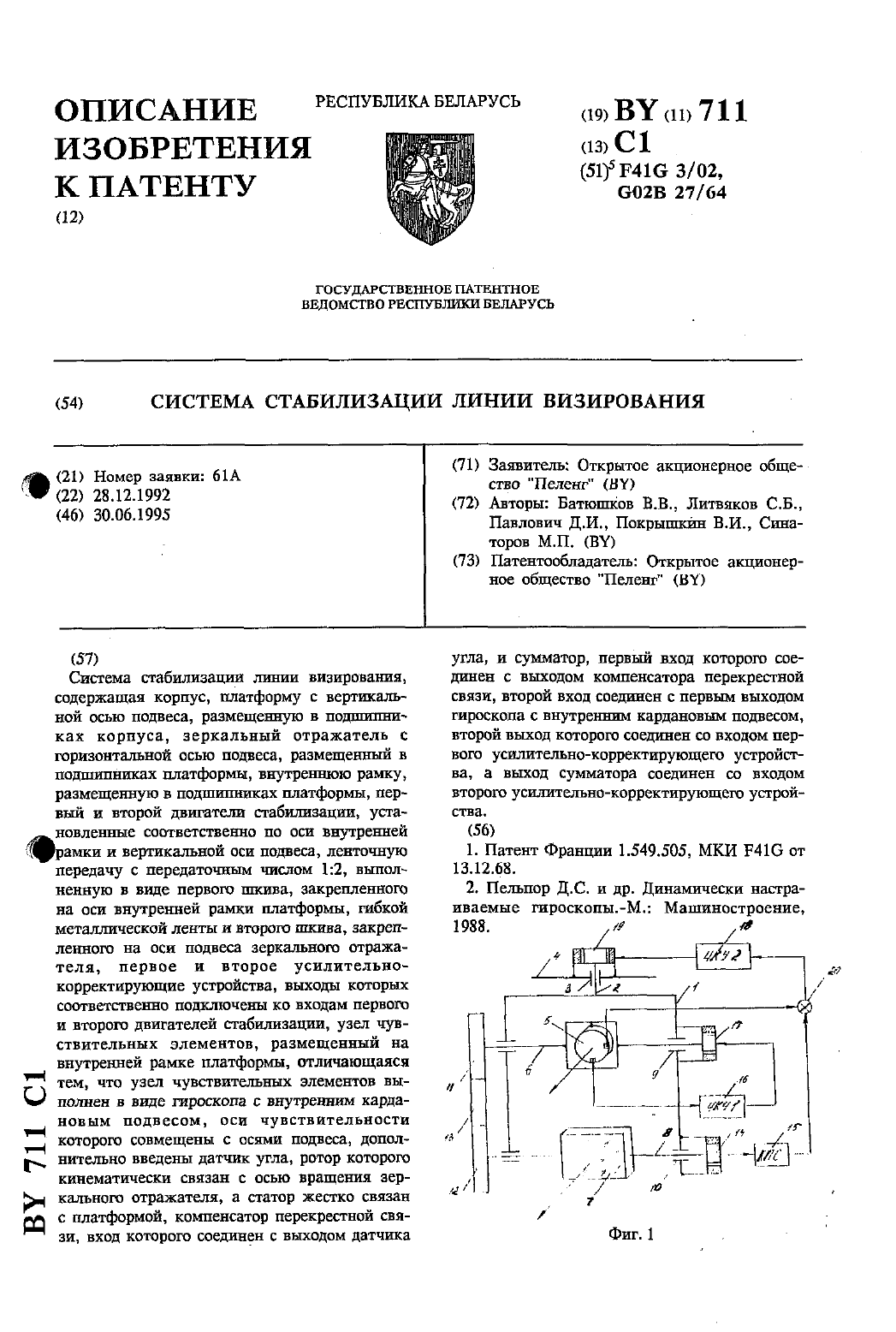
Система стабилизации линии визирования
Номер патента: 711
Опубликовано: 30.06.1995
Авторы: Павлович Д. И., Батюшков В. В., Синаторов М. П., Литвяков С. Б., Покрышкин В. И.
МПК: F41G 3/02, G02B 27/64
Метки: система, стабилизации, визирования, линии
Текст:
...системы координат, связанной с линией визирования- наличие незатухающих колебаний зеркала в условиях вибрации объекта, обусловленных применением в качестве чувствительных элементов одноосных силовых гироскопическихстабилизаторов, имеющих низкую резонансную частоту нутационных колебаний, находящуюся в диапазоне вибраций, возникающих при движении объекта- НИЗКЗЯ ТОЧНОСТЬ СЛЕЖЕНИЯ ЛИНИИ ВИЗИРОвания в режиме управления оператором,...
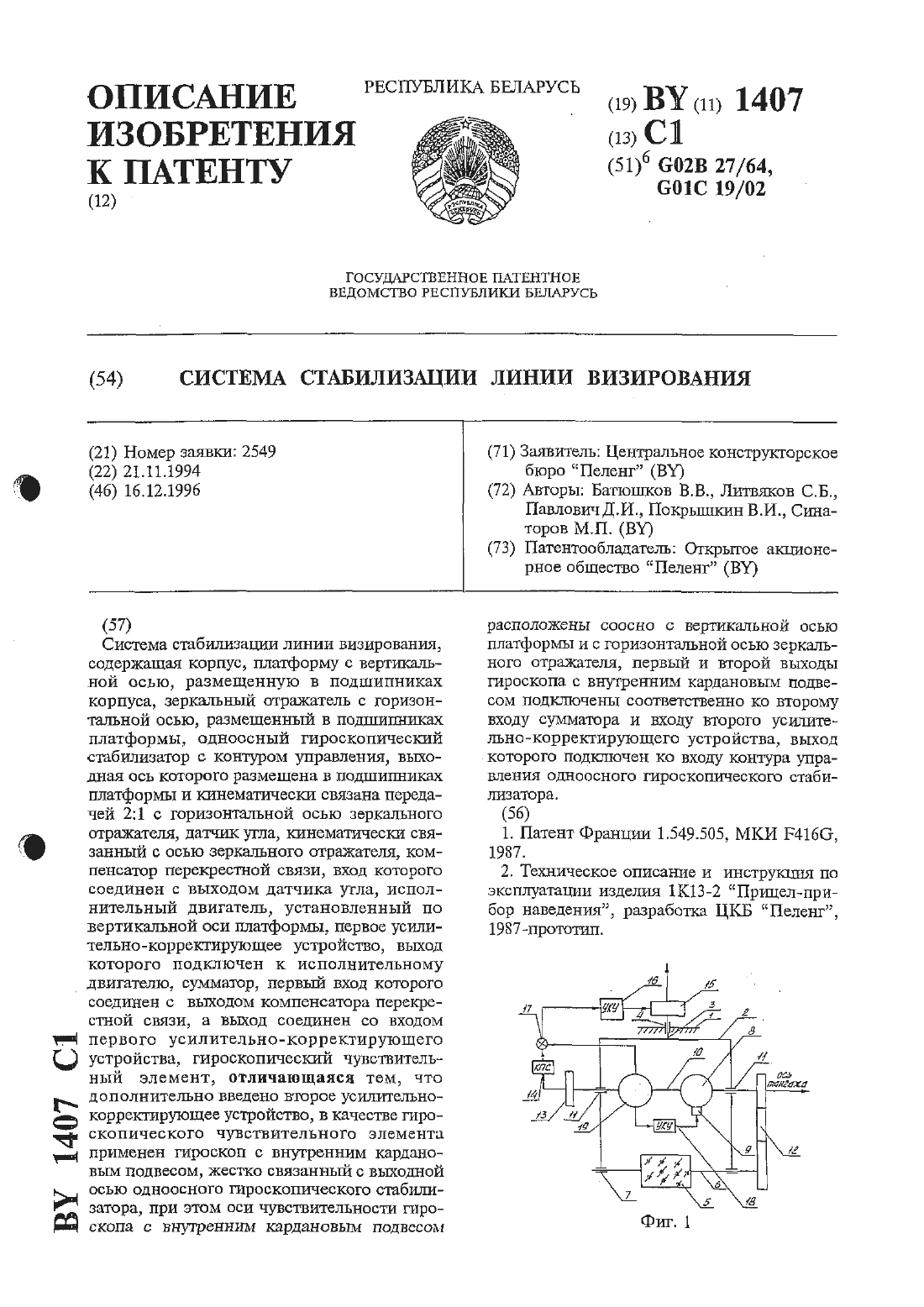
Система стабилизации линии визирования
Номер патента: 1407
Опубликовано: 16.12.1996
Авторы: Батюшков Валентин Вениаминович, Покрышкин Владимир Иванович, Синаторов Михаил Петрович, Литвяков Сергей Борисович, Павлович Дмитрий Иосифович
МПК: G02B 27/64, G01C 19/02
Метки: стабилизации, линии, система, визирования
Текст:
...в подшипниках 7 платформы 2, ОГС 8 с контуром управления 9. выходная ось 10 которого размещена в подшипниках 11 платформы 2 и югнематттесшг связана передачей 12 в соотношении 21 с горизонтальной осью 6 зер 7 ВУ 1407 С 1 акального отражателя 5, датчик угла 13, кинематически связанный с горизонтальной осью 6 зеркального отражателя 5, КПС 14, вход которого соединен с выходом датчика угла 13,исполнительный двигатель 15, установленный по...
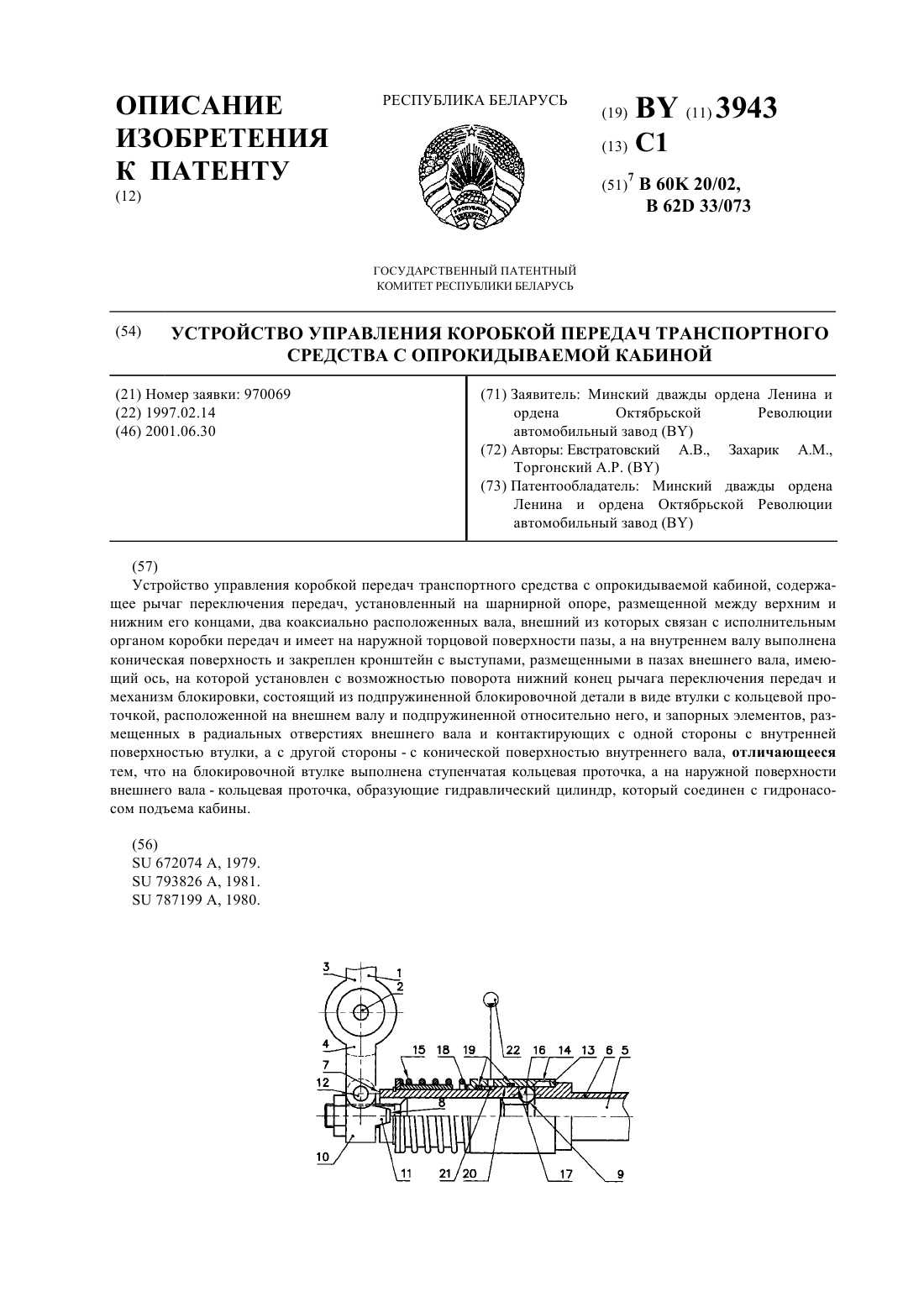
Устройство управления коробкой передач транспортного средства с опрокидываемой кабиной
Номер патента: 3943
Опубликовано: 30.06.2001
Авторы: Захарик Андрей Михайлович, Евстратовский Александр Владимирович, Торгонский Анатолий Романович
МПК: B60K 20/02, B62D 33/073
Метки: устройство, средства, передач, коробкой, опрокидываемой, управления, кабиной, транспортного
Текст:
...повышение надежности конструкции. Поставленная задача выполняется благодаря тому, что в устройстве управления коробкой передач транспортного средства с опрокидываемой кабиной, содержащем рычаг переключения передач, установленный на шарнирной опоре, размещенной между верхним и нижним его концами, два коаксиально расположенных вала, внешний из которых связан с исполнительным органом коробки передач и имеет на наружной торцовой поверхности пазы,...
Устройство для управления транспортным средством

Номер патента: 4917
Опубликовано: 30.03.2003
Авторы: Курек Жанна Леонидовна, Жадик Александр Васильевич, Башаримова Валентина Николаевна, Яскевич Михаил Яковлевич, Геращенко Василий Васильевич, Миронов Константин Данилович
МПК: B60K 41/06
Метки: транспортным, средством, управления, устройство
Текст:
...решение которой обеспечивает повышение надежности и улучшение плавности хода транспортного средства при переключении передач с более высшей на низшую. 2 4917 1 Сущность изобретения заключается в том, что в устройстве для управления транспортным средством, содержащем два датчика частоты вращения, причем первый датчик частоты вращения установлен на валу двигателя внутреннего сгорания, и делитель, согласно изобретению, второй датчик частоты...
Предыдущий патент: Батометр
Следующий патент: Устройство для регулирования скорости асинхронного электродвигателя
Случайный патент: Гидроциклон