Пьезоэлектрический двигатель
Номер патента: 16866
Опубликовано: 28.02.2013
Авторы: Степаненко Дмитрий Александрович, Циммерманн Клаус, Минченя Владимир Тимофеевич, Лысенко Виктор Григорьевич
Текст
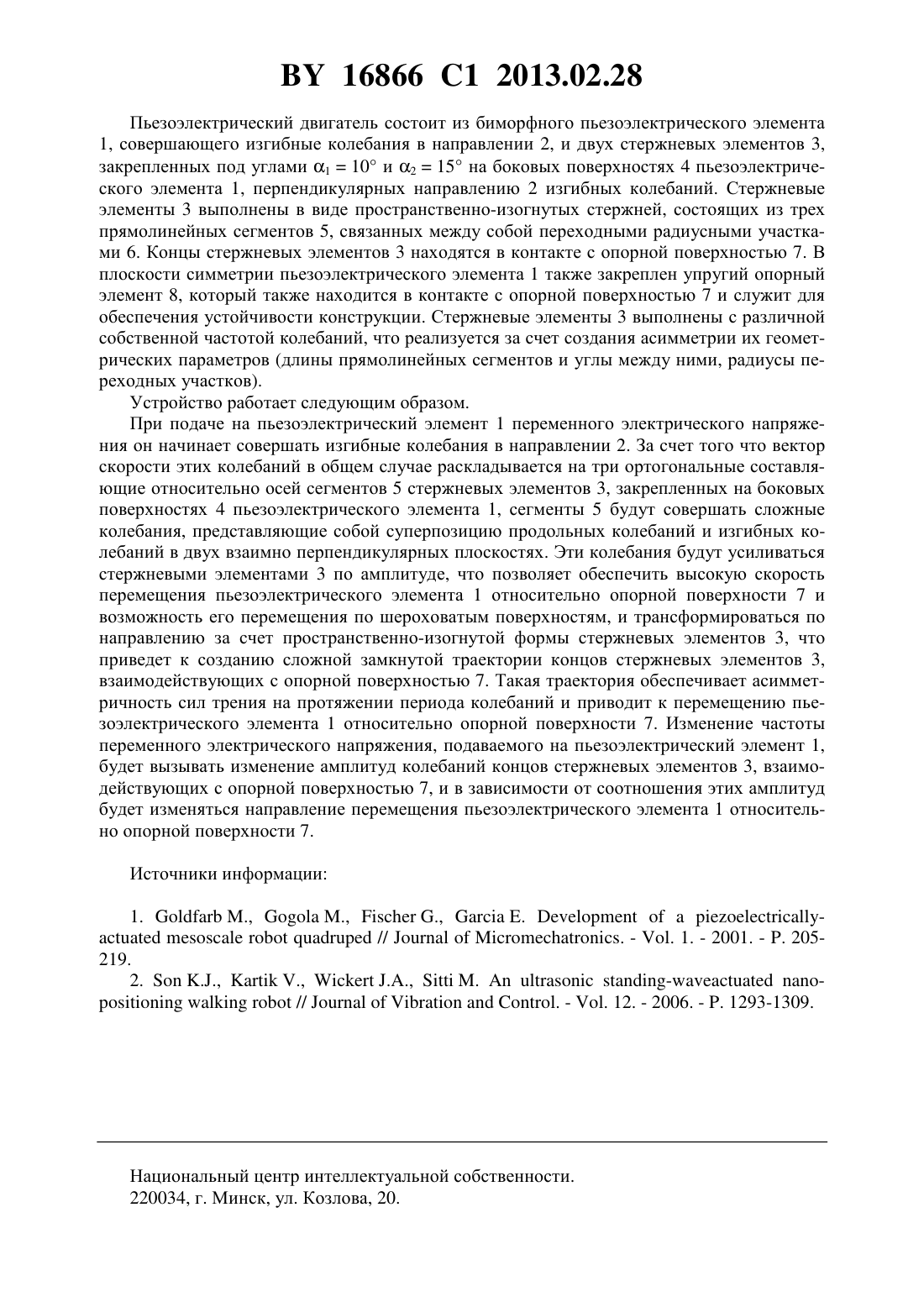
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Белорусский национальный технический университет(72) Авторы Минченя Владимир ТимофеевичЛысенко Виктор ГригорьевичЦиммерманн Клаус Степаненко Дмитрий Александрович(73) Патентообладатель Белорусский национальный технический университет(57) 1. Пьезоэлектрический двигатель, содержащий по меньшей мере один связанный с источником переменного электрического напряжения пьезоэлектрический элемент, выполненный с возможностью совершения изгибных колебаний, по меньшей мере два стержневых элемента, закрепленные на одной или на двух перпендикулярных направлению изгибных колебаний боковых поверхностях пьезоэлектрического элемента, и опорную поверхность, с которой взаимодействуют стержневые элементы, отличающийся тем,что стержневые элементы выполнены пространственно-изогнутыми, включающими по меньшей мере три прямолинейных сегмента, связанные между собой переходными радиусными участками, при этом геометрические параметры одного стержневого элемента отличны от геометрических параметров другого стержневого элемента для обеспечения различной собственной частоты колебаний каждого стержневого элемента. 2. Пьезоэлектрический двигатель по п. 1, отличающийся тем, что прямолинейные сегменты стержневых элементов, закрепленные на боковой поверхности пьезоэлектрического элемента, составляют с ней угол от 10 до 80 градусов. 3. Пьезоэлектрический двигатель по п. 1, отличающийся тем, что содержит массы,присоединенные к стержневым элементам в различных пространственных положениях. 16866 1 2013.02.28 4. Пьезоэлектрический двигатель по п. 1, отличающийся тем, что стержневые элементы содержат участки пластически деформированного материала, размещенные в различных пространственных положениях. 5. Пьезоэлектрический двигатель по п. 1, отличающийся тем, что содержит упругий опорный элемент, закрепленный на пьезоэлектрическом элементе в его плоскости симметрии с возможностью взаимодействия с опорной поверхностью при закреплении двух стержневых элементов на двух перпендикулярных направлению изгибных колебаний боковых поверхностях пьезоэлектрического элемента. Изобретение относится к пьезоэлектрическим устройствам, в частности к пьезоэлектрическим двигателям, которые могут использоваться в качестве элемента манипуляторов, для перемещения грузов и подвижных частей различных механизмов, а также для создания мобильных роботов и быстродействующих исполнительных устройств систем управления. Пьезоэлектрические (ультразвуковые) двигатели широко известны из уровня техники и основаны на преобразовании резонансных колебаний статора, который представляет собой активный электромеханический элемент из пьезоэлектрического материала, в линейные или вращательные перемещения подвижной части (ротора). В другом варианте конструкции пьезоэлектрический элемент перемещается относительно неподвижной опорной поверхности. В качестве аналога заявляемого устройства принят пьезоэлектрический двигатель мобильного робота 1, состоящий из двух униморфных пьезоэлектрических элементов, выполненных с возможностью совершения изгибных колебаний, и четырех опорных элементов (ног), закрепленных на перпендикулярных направлению колебаний боковых поверхностях пьезоэлектрических элементов. Недостатком аналога является сложность конструкции, так как для обеспечения высокой скорости перемещения пьезоэлектрического элемента относительно опорной поверхности и возможности его движения по шероховатым опорным поверхностям используются опорные элементы, выполненные в виде рычажных четырехзвенников с упругими шарнирами и обеспечивающие усиление колебаний по амплитуде. Опорные элементы выполнены с различной собственной частотой колебаний, что обеспечивает возможность управления направлением перемещения пьезоэлектрического элемента относительно опорной поверхности за счет изменения частоты колебаний. Между колебаниями пьезоэлектрических элементов создается фазовый сдвиг, что позволяет за счет использования параллельной структуры четырехзвенников обеспечить эллипсообразную траекторию движения концов опорных элементов, взаимодействующих с опорной поверхностью. Создание такой траектории является необходимым условием функционирования любого пьезоэлектрического двигателя. Наиболее близким к заявляемому устройству является пьезоэлектрический двигатель,используемый в шагающем мобильном роботе 2. Двигатель состоит из двух униморфных пьезоэлектрических элементов, совершающих изгибные колебания, и шести стержневых элементов, закрепленных на боковых поверхностях пьезоэлектрических элементов,перпендикулярных направлению колебаний. При фрикционном взаимодействии концов стержневых элементов с опорной поверхностью происходит перемещение пьезоэлектрического элемента относительно нее. Недостатком прототипа является сложность конструкции, заключающаяся в необходимости использования секционированных электродов пьезоэлектрических элементов. Кроме этого, вследствие малых амплитуд колебаний стержневых элементов ограничены скорость перемещения пьезоэлектрического элемента относительно опорной поверхности и возможность перемещения пьезоэлектрического элемента по шероховатым поверхно 2 16866 1 2013.02.28 стям. Недостатком также является ограниченность перемещений двигателя одним или двумя взаимно противоположными направлениями. Задачей изобретения является создание пьезоэлектрического двигателя, обеспечивающего возможность получения значительных по величине скоростей относительного перемещения пьезоэлектрического элемента и опорной поверхности, возможность управления направлением их взаимного перемещения и возможность движения пьезоэлектрического элемента по шероховатым опорным поверхностям при простоте конструкции. Поставленная задача решается заявляемым пьезоэлектрическим двигателем, содержащим по меньшей мере один связанный с источником переменного электрического напряжения пьезоэлектрический элемент, выполненный с возможностью совершения изгибных колебаний, по меньшей мере два стержневых элемента, закрепленные на одной или на двух перпендикулярных направлению колебаний боковых поверхностях пьезоэлектрического элемента, и опорную поверхность, с которой взаимодействуют стержневые элементы, в котором стержневые элементы выполнены пространственно-изогнутыми, включающими по меньшей мере три прямолинейных сегмента, связанные между собой переходными радиусными участками, при этом геометрические параметры одного стержневого элемента отличны от геометрических параметров другого стержневого элемента для обеспечения различной собственной частоты колебания каждого стержневого элемента. В одном из предпочтительных вариантов реализации изобретения прямолинейные сегменты стержневых элементов, закрепленные на боковой поверхности пьезоэлектрического элемента, составляют с ней угол от 10 до 80 градусов. В другом предпочтительном варианте реализации пьезоэлектрический двигатель дополнительно содержит массы, присоединенные к стержневым элементам в различных пространственных положениях. В еще одном варианте реализации стержневые элементы содержат участки пластически деформированного материала, размещенные в различных пространственных положениях. В еще одном варианте реализации пьезоэлектрический двигатель содержит упругий опорный элемент, закрепленный на пьезоэлектрическом элементе в плоскости симметрии с возможностью взаимодействия с опорной поверхностью, при закреплении двух стержневых элементов на двух перпендикулярных направлению изгибных колебаний боковых поверхностях пьезоэлектрического элемента. Выполнение стержневых элементов пространственно-изогнутыми позволяет обеспечить усиление колебаний пьезоэлектрического элемента по амплитуде, что, в свою очередь, позволяет повысить скорость относительного перемещения пьезоэлектрического элемента и опорной поверхности и обеспечить возможность движения пьезоэлектрического элемента по шероховатым опорным поверхностям. С другой стороны, использование пространственно-изогнутых стержневых элементов обеспечивает трансформацию колебаний по направлению, что позволяет создать сложную замкнутую траекторию движения концов стержневых элементов, взаимодействующих с опорной поверхностью, являющуюся необходимым условием функционирования двигателя. Возможность управления направлением взаимного перемещения пьезоэлектрического элемента и опорной поверхности обеспечивается за счет выполнения стержневых элементов с различной собственной частотой колебаний, что позволяет изменять соотношение амплитуд колебаний концов стержневых элементов, взаимодействующих с опорной поверхностью, за счет изменения частоты колебаний пьезоэлектрического элемента. Один из предпочтительных вариантов реализации заявляемого пьезоэлектрического двигателя рассматривается далее со ссылками на позиции фигуры. На фигуре изображена схема конструкции пьезоэлектрического двигателя, содержащего два пространственно-изогнутых стержневых элемента и упругий опорный элемент. 3 16866 1 2013.02.28 Пьезоэлектрический двигатель состоит из биморфного пьезоэлектрического элемента 1, совершающего изгибные колебания в направлении 2, и двух стержневых элементов 3,закрепленных под углами 110 и 215 на боковых поверхностях 4 пьезоэлектрического элемента 1, перпендикулярных направлению 2 изгибных колебаний. Стержневые элементы 3 выполнены в виде пространственно-изогнутых стержней, состоящих из трех прямолинейных сегментов 5, связанных между собой переходными радиусными участками 6. Концы стержневых элементов 3 находятся в контакте с опорной поверхностью 7. В плоскости симметрии пьезоэлектрического элемента 1 также закреплен упругий опорный элемент 8, который также находится в контакте с опорной поверхностью 7 и служит для обеспечения устойчивости конструкции. Стержневые элементы 3 выполнены с различной собственной частотой колебаний, что реализуется за счет создания асимметрии их геометрических параметров (длины прямолинейных сегментов и углы между ними, радиусы переходных участков). Устройство работает следующим образом. При подаче на пьезоэлектрический элемент 1 переменного электрического напряжения он начинает совершать изгибные колебания в направлении 2. За счет того что вектор скорости этих колебаний в общем случае раскладывается на три ортогональные составляющие относительно осей сегментов 5 стержневых элементов 3, закрепленных на боковых поверхностях 4 пьезоэлектрического элемента 1, сегменты 5 будут совершать сложные колебания, представляющие собой суперпозицию продольных колебаний и изгибных колебаний в двух взаимно перпендикулярных плоскостях. Эти колебания будут усиливаться стержневыми элементами 3 по амплитуде, что позволяет обеспечить высокую скорость перемещения пьезоэлектрического элемента 1 относительно опорной поверхности 7 и возможность его перемещения по шероховатым поверхностям, и трансформироваться по направлению за счет пространственно-изогнутой формы стержневых элементов 3, что приведет к созданию сложной замкнутой траектории концов стержневых элементов 3,взаимодействующих с опорной поверхностью 7. Такая траектория обеспечивает асимметричность сил трения на протяжении периода колебаний и приводит к перемещению пьезоэлектрического элемента 1 относительно опорной поверхности 7. Изменение частоты переменного электрического напряжения, подаваемого на пьезоэлектрический элемент 1,будет вызывать изменение амплитуд колебаний концов стержневых элементов 3, взаимодействующих с опорной поверхностью 7, и в зависимости от соотношения этих амплитуд будет изменяться направление перемещения пьезоэлектрического элемента 1 относительно опорной поверхности 7. Источники информации 1..,.,.,.//. - . 1. - 2001. - . 205219. 2.,.,,.-//. - . 12. - 2006. - . 1293-1309. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: H01L 41/08, H02N 2/00
Метки: пьезоэлектрический, двигатель
Код ссылки
<a href="https://by.patents.su/4-16866-pezoelektricheskijj-dvigatel.html" rel="bookmark" title="База патентов Беларуси">Пьезоэлектрический двигатель</a>
Пьезоэлектрический генератор тока
Номер патента: 2429
Опубликовано: 30.09.1998
Авторы: Пироговский Константин Николаевич, Кудрявцев Игорь Александрович
МПК: H01L 41/113, H02N 2/18
Метки: генератор, тока, пьезоэлектрический
Текст:
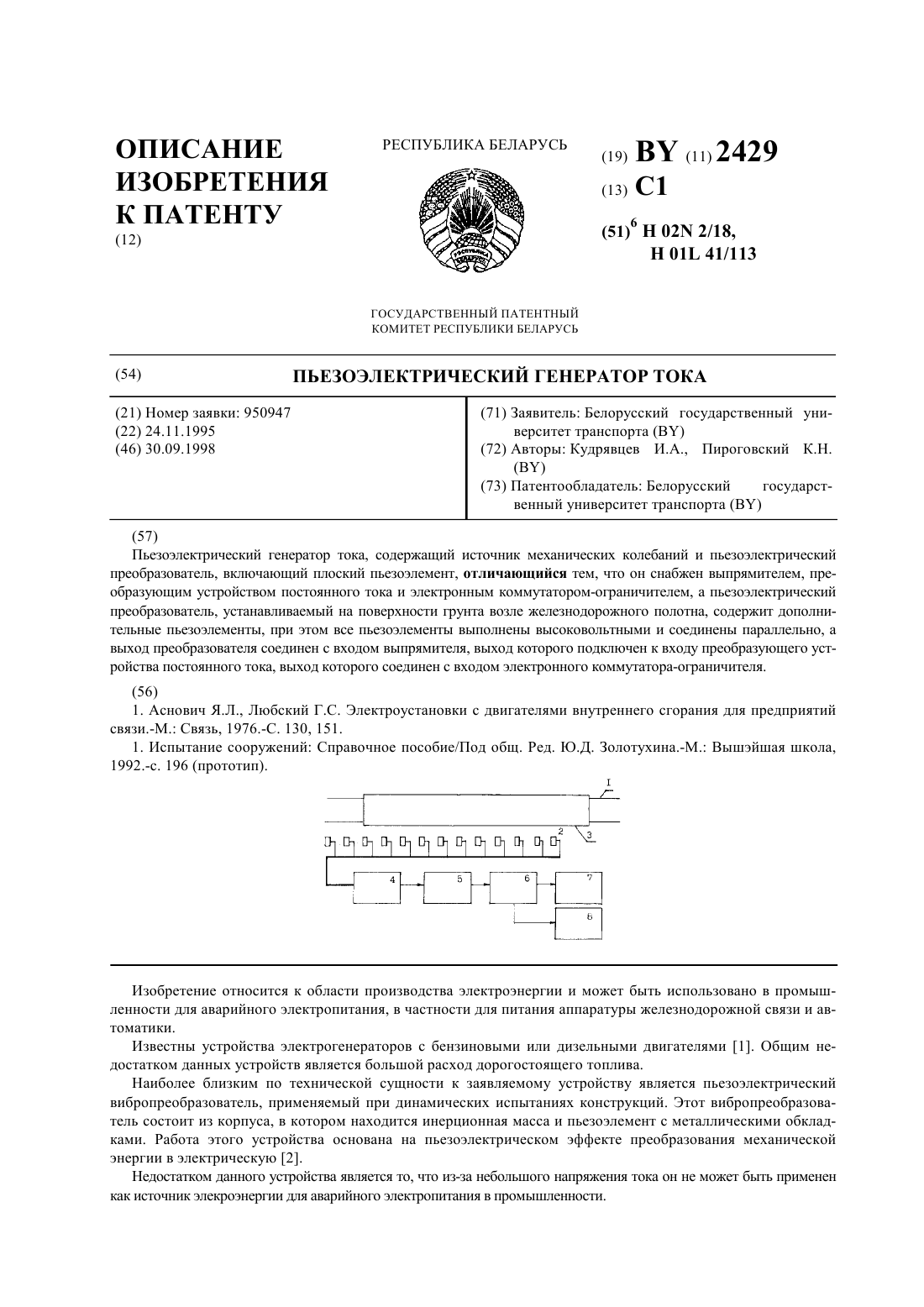
...основана на пьезоэлектрическом эффекте преобразования механической энергии в электрическую 2. Недостатком данного устройства является то, что из-за небольшого напряжения тока он не может быть применен как источник элекроэнергии для аварийного электропитания в промышленности. 2429 1 Технической задачей заявляемого технического решения, которая может быть решена при использовании предлагаемого пьезоэлектрического генератора тока, является...
Пьезоэлектрический материал
Номер патента: 16439
Опубликовано: 30.10.2012
Авторы: Чобот Александра Николаевна, Шаповалова Елена Федоровна, Мантыцкая Ольга Станиславовна, Терешко Нина Викторовна, Троянчук Игорь Олегович
МПК: H01L 41/187, C04B 35/40
Метки: пьезоэлектрический, материал
Текст:
...температуре эффективного пьезоэлектрического коэффициента 33 состава 0,840,163, синтезированного при 950 С в течение 10 часов (линейный пьезоэлектрический параметр 33 измерялся методом пьезосиловой микроскопии). В таблице представлены результаты измерения при комнатной температуре эффективного пьезоэлектрического коэффициента 33 твердых растворов с другим содержанием лантана, синтезированных при 950 С в течение 10 часов. Величина...
Пьезоэлектрический керамический материал со структурой перовскита
Номер патента: 16634
Опубликовано: 30.12.2012
Авторы: Троянчук Игорь Олегович, Мантыцкая Ольга Станиславовна, Шаповалова Елена Федоровна, Чобот Александра Николаевна
МПК: C04B 35/26
Метки: структурой, керамический, пьезоэлектрический, материал, перовскита
Текст:
...нестабильность ведет к увеличению пьезоэлектрического эффекта. Катионное замещение вызывает в феррите висмута локальные кристаллоструктурные искажения, в результате возникают локальные напряжения, меняющиеся под воздействием электрического поля. Частичная замена ионов висмута ионами лантана в -подрешетке, а ионов железа - ионами марганца в -подрешетке перовскитной структуры феррита висмута позволяет получить пьезоэлектрический...
Пьезоэлектрический материал на основе оксида висмута
Номер патента: 15329
Опубликовано: 28.02.2012
Авторы: Бушинский Максим Владиславович, Шаповалова Елена Федоровна
МПК: C30B 29/22, C04B 35/26, C01G 29/00...
Метки: оксида, основе, материал, пьезоэлектрический, висмута
Текст:
...параметр 33 измерялся методом пьезосиловой микроскопии). На фиг. 2 представлены результаты измерения при комнатной температуре линейного пьезоэлектрического коэффициента 33 состава 0,860,140,103,отожженного при 250 С в течение 30 мин. Сущность изобретения заключается в том, что в пьезоэлектрическом материале на основе феррита висмута при частичном замещении трехвалентных ионов висмута двухвалентными ионами кальция возникают...
Пьезоэлектрический материал на основе феррита висмута
Номер патента: 15237
Опубликовано: 30.12.2011
Авторы: Чобот Александра Николаевна, Шаповалова Елена Федоровна, Мантыцкая Ольга Станиславовна
МПК: C30B 29/22, C04B 35/26, C01G 29/00...
Метки: материал, пьезоэлектрический, основе, висмута, феррита
Текст:
...линейного пьезоэлектрического коэффициента 33 состава 0.82180,910,093 при комнатной температуре. Величина 33 превышает 40 / при напряжении до 10 В. На фиг. 4 представлены результаты измерения линейного пьезоэлектрического коэффициента 33 состава 0,81190.9050,0953 при комнатной температуре. Величина 33 составляет около 30 / при напряжении до 10 В. Сущность изобретения заключается в том, что в пьезоэлектрическом материале на основе...