Летательный аппарат вертикального взлета и посадки
Текст
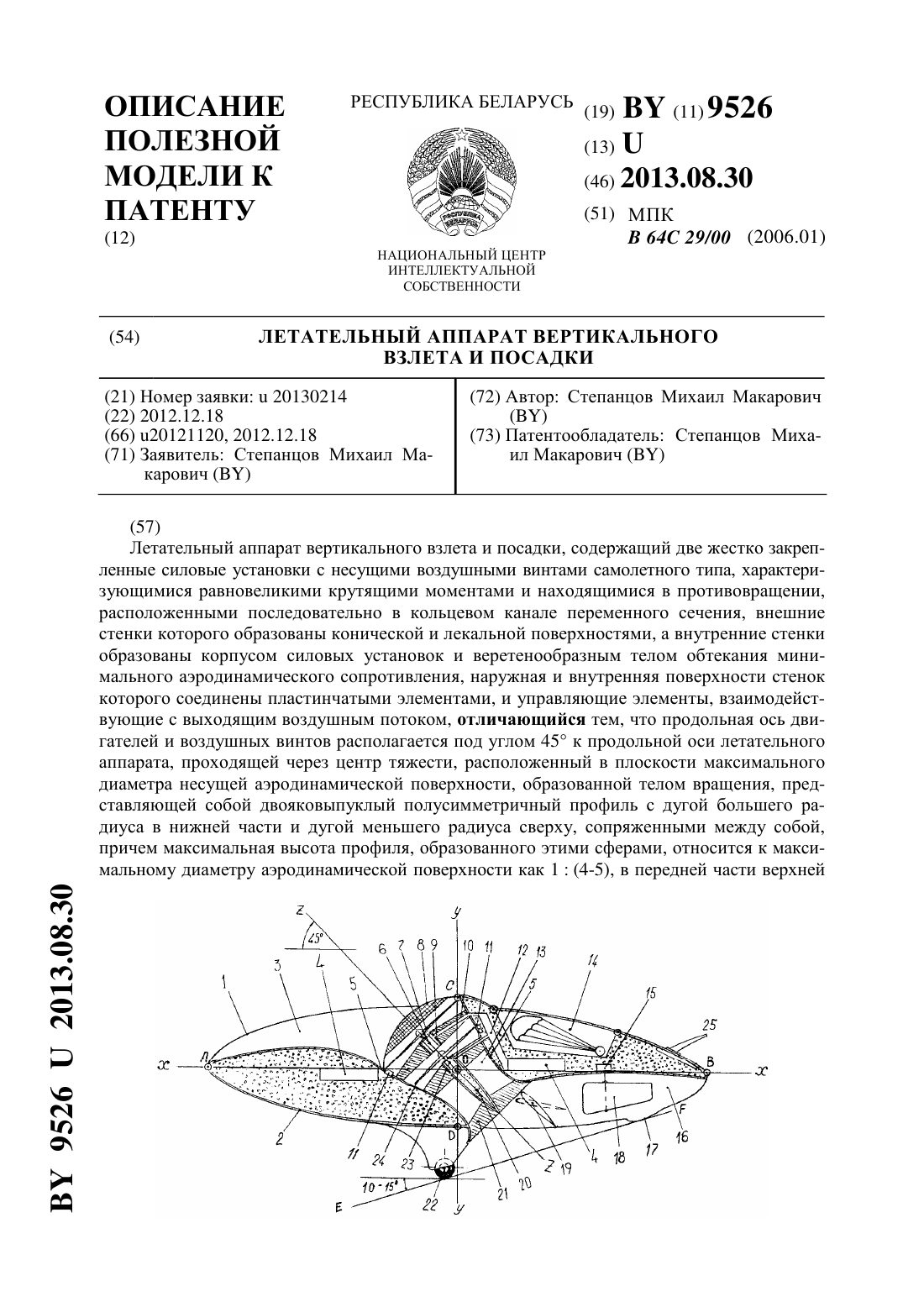
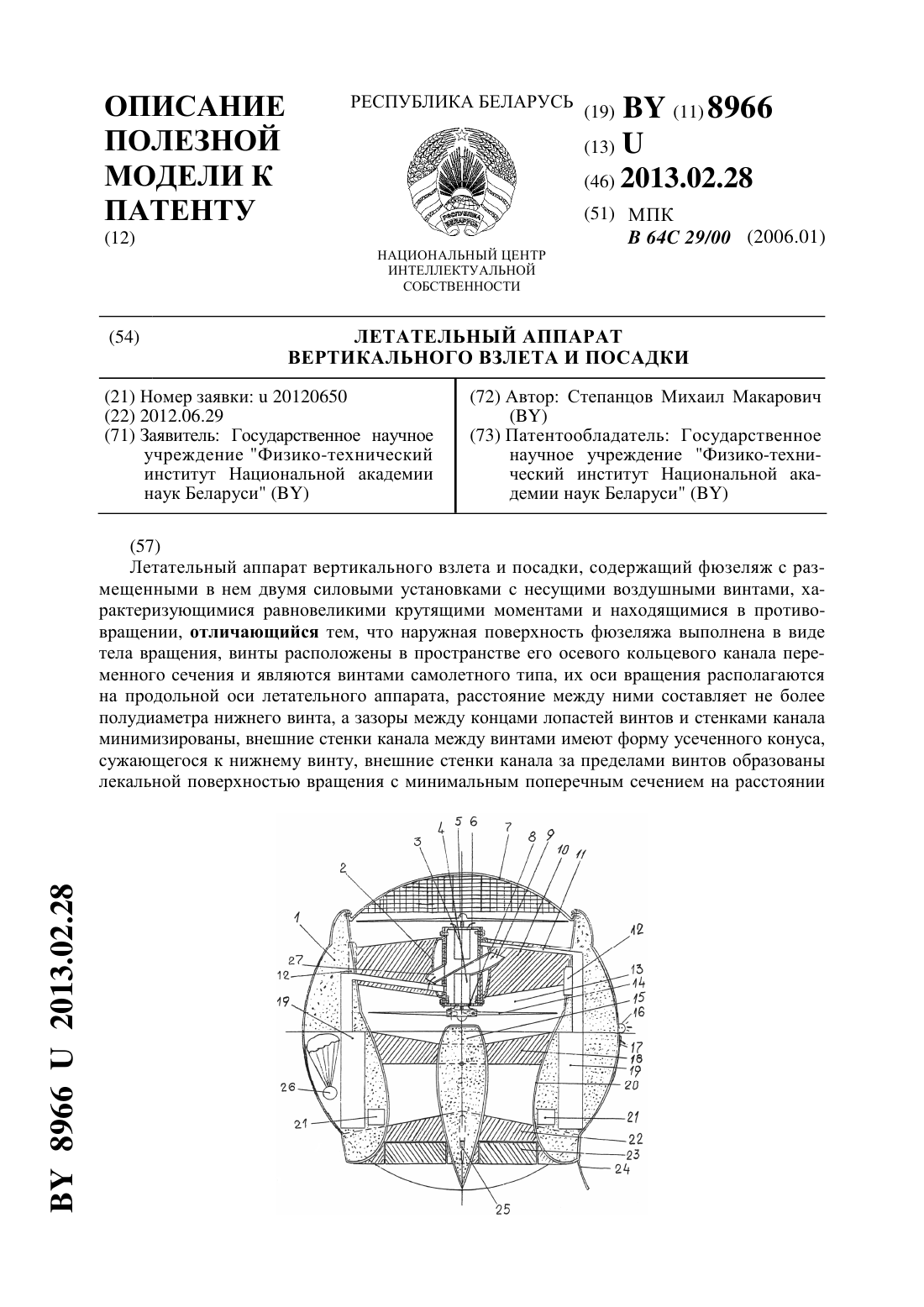
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ(71) Заявитель Степанцов Михаил Макарович(72) Автор Степанцов Михаил Макарович(73) Патентообладатель Степанцов Михаил Макарович(57) Летательный аппарат вертикального взлета и посадки, содержащий две жестко закрепленные силовые установки с несущими воздушными винтами самолетного типа, характеризующимися равновеликими крутящими моментами и находящимися в противовращении,расположенными последовательно в кольцевом канале переменного сечения, внешние стенки которого образованы конической и лекальной поверхностями, а внутренние стенки образованы корпусом силовых установок и веретенообразным телом обтекания минимального аэродинамического сопротивления, наружная и внутренняя поверхности стенок которого соединены пластинчатыми элементами, и управляющие элементы, взаимодействующие с выходящим воздушным потоком, отличающийся тем, что продольная ось двигателей и воздушных винтов располагается под углом 45 к продольной оси летательного аппарата, проходящей через центр тяжести, расположенный в плоскости максимального диаметра несущей аэродинамической поверхности, образованной телом вращения, представляющей собой двояковыпуклый полусимметричный профиль с дугой большего радиуса в нижней части и дугой меньшего радиуса сверху, сопряженными между собой,причем максимальная высота профиля, образованного этими сферами, относится к максимальному диаметру аэродинамической поверхности как 1(4-5), в передней части верхней 95262013.08.30 аэродинамической поверхности спрофилирован канал подвода воздуха к силовым установкам, в задней части нижней аэродинамической поверхности спрофилирован канал выхода воздушного потока, управляющие элементы расположены на поверхности упомянутого канала выхода и выполнены в виде элевонов и руля направления, на нижней аэродинамической поверхности смонтированы шасси, обеспечивающие угол стартовой позиции между плоскостью горизонта и плоскостью максимального диаметра 10-15.(56) 1. Бауэрс П. Летательные аппараты нетрадиционных схем Пер. с англ. - М. Мир,1991. - С. 208-230. 2. Патент РБ 8966, 2012. 3. Чумак П.И., Кривокрысенко В.Ф. Расчет, проектирование и постройка сверхлегких самолетов. - М. Патриот, 1991. - С. 20. 4. Чумак П.И., Кривокрысенко В.Ф. Расчет, проектирование и постройка сверхлегких самолетов. - М. Патриот, 1991. - С. 74. Заявляемая полезная модель относится к области авиации и может быть использована при создании пилотируемых и беспилотных летательных аппаратов. Аналог заявляемого летательного аппарата - это конвертоплан, способный осуществлять вертикальные взлет и посадку, как это делают вертолеты, и длительный скоростной горизонтальный полет, характерный для самолетов 1. Вертикальный взлет обеспечивается только за счет использования тяги двигателя, когда тяга силовой установки или воздушных винтов превышает вес летательного аппарата. Обычно используют силовые установки, развивающие тягу на один килограмм веса двигателя более 6-7 кг. В некоторых из летательных аппаратов этого класса устройства создания тяги отклоняются на небольшой угол для обеспечения горизонтального полета, а также для создания значительной части подъемной силы. В конвертопланах для взлета используются тяга воздушных винтов, вентиляторов или реактивных двигателей, после чего производится изменение направления вектора тяги таким образом, что аппарат начинает выполнять полет по самолетному типу. При этом необходимая подъемная сила при поступательном движении создается за счет обтекания потоком воздуха несущих и управляющих поверхностей - крыла и оперения. Конвертопланы характеризуются двумя резко различающимися режимами полета взлет-посадка и непосредственно полет. Это требует обеспечения управляемости аппарата при переходе от одного режима к другому. На режимах вертикального взлета и посадки органы управления (элероны, рули высоты и направления) при отсутствии энергии набегающего воздушного потока неэффективны и не могут создавать управляющие силы, изменяющие пространственное положение летательного аппарата. Поэтому летательный аппарат в режиме взлета и посадки должен располагать дополнительной системой управления,эффективной при малых или нулевых значениях воздушной скорости, что значительно повышает их вес и сложность конструкции. Высокая техническая сложность конструкции конвертопланов отрицательно сказывается на безопасности их эксплуатации и не позволяет им по сравнению с обычными самолетами иметь такой же ресурс эксплуатации. При этом высокая стоимость, малый радиус действия и малая полезная нагрузка накладывают дополнительные ограничения на их применение. Наиболее близким к заявляемой полезной модели, ее прототипом является летательный аппарат вертикального взлета и посадки 2, содержащий фюзеляж, в котором размещены две силовые установки с несущими воздушными винтами противоположного направления вращения, расположенными в кольцевом канале переменного сечения, внешние стенки 2 95262013.08.30 которого образованы конической и лекальной поверхностями, а внутренние стенки образованы корпусом силовых установок и веретенообразным телом обтекания минимального аэродинамического сопротивления наружная и внутренняя поверхности стенок соединены пластинчатыми элементами, на которых установлены рули высоты и элероны. Данный летательный аппарат вертикального взлета и посадки выполняет полет следующим образом. При вращении воздушного винта первого двигателя вследствие взаимодействия его лопастей с воздухом в непосредственной близости перед плоскостью его вращения образуется область пониженного давления, вызывающая ускорение впереди находящегося потока в плоскости вращения винта. Скорость потока возрастает за счет осевой составляющей,вызванной самим винтом, а на некотором расстоянии в суживающемся канале, где установлен второй воздушный винт, скорость потока, отброшенного первым воздушным винтом, приближается к максимальной. Второй воздушный винт, имеющий углы установки лопастей примерно в два раза больше, чем у первого, и принимающий ускоренный воздушный поток от первого винта, закрученный в сторону его вращения, обеспечивает практически одинаковое аэродинамическое воздействие на этот поток, как и первый воздушный винт, но при противоположном вращении относительно первого. В результате такого взаимодействия воздушный поток закручивается в противоположном направлении и при равных крутящих моментах воздушных винтов спрямляется. На расстоянии полудиаметра второго винта воздушный поток получает максимальное ускорение и сжимается. Практически на этом расстоянии от винта выполнено максимальное сужение кольцевого канала для поддержания в оптимальном режиме энергии воздушного потока, величина поперечного сечения которого зависит от скорости его движения скорость больше - сечение меньше, и наоборот. К нижней части аппарата после максимального сужения кольцевой канал расширяется, что ведет к уменьшению скорости потока и, соответственно, к возрастанию давления на стенки кольцевого канала. Аэродинамические органы управления, элероны и рули высоты, взаимодействующие с выходящим потоком, управляют летательным аппаратом по направлению движения. При неравенстве крутящих моментов воздушных винтов возникает вращение летательного аппарата относительно вертикальной оси, которое устраняется увеличением частоты вращения винта, противоположного возникшему вращению летательного аппарата, или гасится с помощью элеронов, которые при противоположном отклонении образуют соответствующие аэродинамические силы. Рули высоты при взаимодействии с выходящим потоком отклоняют продольную ось летательного аппарата от вертикали, причем создается горизонтальная составляющая силы тяги, которая вызывает перемещение летательного аппарата по горизонту. Данный летательный аппарат выполняет полет только за счет использования тяги двигателей, так как не имеет несущих аэродинамических поверхностей, и при переходе к режиму горизонтального перемещения требует увеличения мощности двигателей, расходуя избыток тяги. Это необходимо, чтобы уравновесить вертикальной составляющей силы тяги воздушных винтов полетный вес летательного аппарата, а горизонтальной составляющей силы тяги необходимо обеспечить преодоление лобового сопротивления аппарата при поступательном движении. При максимальной величине взлетного веса аппарата горизонтальное перемещение без снижения невозможно, так как отсутствует избыток тяги двигателей. Поэтому для обеспечения горизонтального перемещения летательного аппарата необходимо снижать величину полезной нагрузки. Кроме того, на величину полезной нагрузки будут влиять энергетические потери силовых установок, которые расходуются на балансировочное сопротивление, вызываемое отклонением рулей управления, находящихся в скоростном потоке от винтов. Поэтому основными недостатками прототипа являются небольшая скорость горизонтального полета (до 20-25 км/ч), нерациональное использование тяговой силы двигателей и невысокая маневренность. 3 95262013.08.30 Задачей заявляемой полезной модели является повышение скорости летательного аппарата и увеличение его полезной нагрузки и маневренности. Поставленная задача решается тем, что в летательном аппарате вертикального взлета и посадки, содержащем две жестко закрепленные силовые установки с несущими воздушными винтами самолетного типа, характеризующимися равновеликими крутящими моментами и находящимися в противовращении, расположенными последовательно в кольцевом канале переменного сечения, внешние стенки которого образованы конической и лекальной поверхностями, а внутренние стенки образованы корпусом силовых установок и веретенообразным телом обтекания минимального аэродинамического сопротивления, наружная и внутренняя поверхности стенок которого соединены пластинчатыми элементами, и управляющие элементы, взаимодействующие с выходящим воздушным потоком, продольная ось двигателей и воздушных винтов располагается под углом 45 к продольной оси летательного аппарата, проходящей через центр тяжести, расположенный в плоскости максимального диаметра несущей аэродинамической поверхности, образованной телом вращения, представляющей собой двояковыпуклый полусимметричный профиль с дугой большего радиуса в нижней части и дугой меньшего радиуса сверху, сопряженными между собой, причем максимальная высота профиля, образованного этими сферами, относится к максимальному диаметру аэродинамической поверхности как 1(4-5),в передней части верхней аэродинамической поверхности спрофилирован канал подвода воздуха к силовым установкам, в задней части нижней аэродинамической поверхности спрофилирован канал выхода воздушного потока, управляющие элементы расположены на поверхности упомянутого канала выхода и выполнены в виде элевонов и руля направления, на нижней аэродинамической поверхности смонтированы шасси, обеспечивающие угол стартовой позиции между плоскостью горизонта и плоскостью максимального диаметра 10-15. Сущность заявляемого технического решения заключается в создании дополнительной подъемной силы за счет несущей аэродинамической поверхности летательного аппарата. Дополнительная подъемная сила возникает под действием набегающего воздушного потока в процессе полета аппарата за счет его обеспечения аэродинамической поверхностью. Величина этой силы определяется разностью давлений на нижнюю и верхнюю поверхности,что обеспечивается заявляемыми геометрическими характеристиками этой поверхности. Заявляемый летательный аппарат может осуществлять взлет как с небольшим разбегом, так и без него. Без разбега взлет осуществляется только за счет тяги двигателей, которая должна превышать вес аппарата. Вес принимаемого на борт груза в этом случае, как и у прототипа, небольшой и определяется разностью между весом аппарата и тягой двигателей. При взлете с разбегом грузоподъемность аппарата за счет возникновения дополнительной подъемной силы значительно возрастает. Расположение продольной оси двигателей и воздушных винтов к продольной оси летательного аппарата под углом 45 обеспечивает при взлете требуемую вертикальную составляющую силу тяги, превышающую взлетный вес, а в полете при поступательном движении обеспечивает создание части подъемной силы несущей аэродинамической поверхностью летательного аппарата и части подъемной силы составляющей силы тяги. При этом горизонтальная составляющая силы тяги преодолевает лобовое сопротивление летательного аппарата в полете, летательный аппарат при этом способен при необходимости совершать короткий взлет и посадку и изменять направление движения на всех режимах полета с угловой скоростью более 45 в секунду. Повышенная безопасность летательного аппарата обеспечивается отсутствием выходящих наружу аэродинамической поверхности вращающихся и подвижных элементов конструкции, а в аварийной ситуации есть возможность применять спасательное средство - посадочный парашют. Угол в 45 выбран в связи с тем, что только в этом случае реализуется одинаковое распределение тяги в горизонтальном и вертикальном направлениях. Расположение цента тяжести аппарата на оси 4 95262013.08.30 движителей необходимо для минимизации балансировочного сопротивления в полете. Поскольку ось движителей аппарата расположена под углом к его оси 45, то это вызывает необходимость обустройства воздушного канала в верхней и нижней частях аппарата,обеспечивающего ламинарное и безударное течение воздуха. Это достигается профилированием каналов подвода и выхода воздуха в передней верхней и задней нижней частях аэродинамической поверхности. Поперечная устойчивость заявляемого летательного аппарата в полете относительно его продольной оси обеспечивается формой аппарата, когда крен вызывает прирост аэродинамической подъемной силы на опущенной поверхности и уменьшение подъемной силы на поднятой поверхности, что создает восстанавливающий момент относительно центра тяжести и гарантирует устойчивый прямолинейный полет. В связи с этим в качестве управляющих элементов для маневрирования летательного аппарата по высоте и направлению выбраны элевоны и руль направления, которые установлены в канале выхода воздушного потока. При заходе на посадку углы тангажа аппарата увеличиваются для гашения скорости и создания посадочной конфигурации для приземления. Выбор формы аэродинамической поверхности обусловлен следующими факторами. Симметричная форма поверхности в плане (тело вращения) необходима для обеспечения устойчивости аппарата при полете и маневрировании. Форма аэродинамической поверхности в разрезе (по вертикали) максимально приближена к профилю крыла самолета для обеспечения создания подъемной силы под действием набегающего воздушного потока. Соотношение высоты профиля, образованного сопряженными сферами, образующими рассматриваемую аэродинамическую поверхность, к максимальному диаметру 1(4-5) выбрано в связи с тем, что при соотношении менее 14, например 13, резко возрастает лобовое сопротивление аппарата, подъемная сила аэродинамической поверхности резко падает за счет срыва набегающего воздушного потока. При соотношении более 15, например 16, значительно уменьшается разница давлений на нижнюю и верхнюю поверхности, обеспечивающая подъемную силу, а также уменьшается полезный объем аппарата. Смонтированные на нижней аэродинамической поверхности шасси обеспечивают защиту аэродинамической поверхности от повреждений при контакте с землей (или взлетно-посадочной полосой), а также обеспечивают требуемый угол стартовой позиции между плоскостью горизонта и плоскостью аппарата (плоскостью максимального диаметра). Выбор угла стартовой позиции обоснован тем, что при угле менее 10, например 5, вертикальный взлет аппарата затруднен, т.к. вертикальная составляющая вектора тяги при этом заметно падает и не обеспечивает вертикальный отрыв аппарата с места. Угол стартовой позиции более 15, например 20, затрудняет взлет с короткой взлетно-посадочной полосы ввиду большого лобового сопротивления. Заявленное техническое решение поясняется расчетами. В качестве исходных данных принимаются характеристики прототипа, приведенные в его описании, и характеристики заявляемого летательного аппарата, изготовленного на базе прототипа (раздел промышленная применимость настоящего описания). Диаметр аэродинамической поверхности для расчета принят равным 2 м, а вес 7,1 кг. Аэродинамическая подъемная сила при разбеге летательного аппарата может быть вычислена по формуле 32,(1) 2 где- аэродинамическая подъемная сила аппарата, кг- аэродинамический коэффициент подъемной силы, зависящий от угла атаки и формы поверхности- плотность воздуха для расчетов с учетом высоты полета, принимаемая равной 1,25 кг/м 3- скорость разбега, м/с 5 95262013.08.30- площадь несущей аэродинамической поверхности в плане, м 2- ускорение свободного падения, м/с 2. При достижении скорости разбега 5 м/с дополнительная аэродинамическая подъемная сила с учетом того, что 0,6 4, составит 1,2552 5 м / с 0,6 3,143,0 кг .(2) 29,81 При скорости разбега 10 м/с величина аэродинамической подъемной силы с учетом уменьшениядо 0,5 за счет уменьшения угла атаки составит уже 10 м/с 10,0 кг.(3) Если полная тяга двигателейсоставляет, например, 9 кг, то вертикальная составляющая силы тяги с учетом угла наклона оси воздушных винтов под углом 45 к линии горизонта составит на взлетном режиме величину, равную 4590,70716,4 кг(4) Поскольку полная подъемная сила летательного аппарата является суммой вертикальной составляющей силы тяги и подъемной силы аэродинамической поверхности, т.е. в данном случае для скорости разбега 5 м/с составляет 3,06,49,4 кг, а для скорости разбега 10 м/с составляет 10,06,416,4 кг, то величина полезной нагрузки составит разницу между этой величиной и весом летательного аппарата 16,47,19,3 кг (для скорости разбега 10 м/с). В случае же прототипа полезная нагрузка составляет максимум 3,4 кг. Таким образом, для летательного аппарата с несущей аэродинамической поверхностью величина полезной нагрузки при взлете с небольшим разбегом может быть увеличена приблизительно в 3 раза. Заявленное техническое решение поясняется фигурой, где приведена схема заявляемого летательного аппарата вертикального взлета и посадки с несущей аэродинамической поверхностью в разрезе по линии максимального диаметра. Как видно из фигуры, несущая аэродинамическая поверхность заявляемого летательного аппарата состоит из верхней части 1, образованной дугой меньшего радиуса, и нижней части 2, образованной дугой большего радиуса. В корпусе несущей аэродинамической поверхности находится воздушный канал 13 переменного сечения, образованный внешней стенкой 5 и корпусом первой силовой установки 9 и веретенообразным телом обтекания минимального аэродинамического сопротивления 20. В корпусе 9 установлена первая силовая установка 6, на которой установлен первый воздушный винт 7. Корпус 9 крепится к стенкам кольцевого канала с помощью пластинчатых элементов 10, в которых имеются каналы подвода коммуникаций 12. Вторая силовая установка 23 снабжена винтом 24 и установлена в корпусе, выполненном в виде веретенообразного тела 20, закрепленного на стенках 5 воздушного канала переменного сечения с помощью пластинчатых элементов 21. Внутри объема, образованного верхней 1 и нижней 2 частями аэродинамической поверхности, содержатся грузовые отсеки 4 и парашютный отсек 14. В канале подвода воздуха 3 установлена защитная сетка 8 для предотвращения попадания инородных предметов. Регулятор оборотов 11 расположен на стенках канала 5 для обеспечения его эффективного охлаждения. В канале выхода воздушного потока 16 расположены руль направления 18,управляемый сервоприводом 15, и элевоны 19. В стояночном положении заявляемый аппарат опирается на шасси 22 и заднюю опорную поверхность 17. Связь аппарата с наземными службами осуществляется с помощью приемо-передатчика, снабженного антенной 25. Продольная осьлетательного аппарата проходит через центр тяжестии расположена в плоскости максимального диаметранесущей аэродинамической поверхности. Продольная ось двигателейпроходит через центр тяжестии расположена под углом 45 к оси . Максимальная высотапрофиля, образованного верхней 1 и нижней 2 частями аэродинамической поверхности, относится к максимальному диаметру 6 95262013.08.30 аэродинамической поверхности как 1(4-5). Стояночный угол между продольной осью аппарата ХХ и плоскостью опорной поверхностисоставляет 10-15. Заявляемый летательный аппарат вертикального взлета и посадки с несущей аэродинамической поверхностью выполняет полет следующим образом. Аппарат в стартовой позиции устанавливается на шасси 22 и заднюю опорную поверхность 17 на горизонтальную поверхностьили уклон. В этом положении уголмежду продольной осью двигателейи горизонтомсоставляет 55-60 (и более с учетом уклона), т.е. вертикальная составляющая силы тяги верт. при таком положении летательного аппарата будет составлять верт.макс 0,86 макс величины полной тяги макс, что достаточно для осуществления вертикального взлета при тяговооруженности летательного аппарата (отношение тяги двигателей к массе аппарата), равной 1,2-1,3. При вращении воздушного винта 7 первого двигателя 6 вследствие взаимодействия его лопастей с воздухом в канале 3 образуется область пониженного давления, вызывающая ускорение входящего воздушного потока в плоскости вращения винта. Второй винт 24 второго двигателя 23 принимает ускоренный в кольцевом канале 13 воздушный поток от первого винта 7. Поскольку второй воздушный винт имеет углы установки лопастей примерно в два раза больше, чем у первого, и обеспечивает практически одинаковое аэродинамическое воздействие на поток, как и первый воздушный винт, но при противоположном вращении относительно первого, то в результате такого взаимодействия воздушный поток при равных крутящих моментах воздушных винтов спрямляется. На расстоянии полудиаметра второго винта воздушный поток получает максимальное ускорение и сжимается. На этом расстоянии от винта выполнено максимальное сужение кольцевого канала для максимального использования энергии воздушного потока. Далее кольцевой канал расширяется, что ведет к уменьшению скорости потока и, соответственно, к возрастанию давления на стенки кольцевого канала. При выходе двигателей на режим, когда вертикальная составляющая тяги воздушных винтов превышает взлетный вес, летательный аппарат отделяется от стартовой поверхности и по наклонной траектории набирает заданную высоту. Аэродинамические органы управления - двухсекционные элевоны 19 и руль направления 18 - взаимодействуют с выходным воздушным потоком и обеспечивают управление полетом летательного аппарата по заданной траектории. При использовании прототипа после набора высоты для перехода в режим горизонтального полета летательный аппарат необходимо отклонить от вертикали и одновременно увеличить тягу двигателей для сохранения требуемой высоты полета. В случае использования заявляемого летательного аппарата переход в режим горизонтального полета не требует одновременного увеличения тяги двигателя, т.к. сохранение требуемой высоты полета обеспечивается подъемной силой, создаваемой за счет взаимодействия аэродинамической поверхности с набегающим воздушным потоком. Вся тяга двигателя в этом случае расходуется на увеличение скорости полета. Часть полученного избытка тяги может быть расходована на увеличение полезной нагрузки. Повышение маневренности достигается также за счет наличия избытка тяги. В случае прототипа при совершении маневров в воздушном пространстве значительная часть тяги расходуется на совершение этого маневра. В случае резких маневров, например разворота с угловой скоростью 45 /с, наблюдается резкое снижение аппарата. Заявляемый летательный аппарат позволяет поддерживать требуемую высоту даже при совершении таких резких маневров, поскольку располагает достаточным избытком тяги и аэродинамической устойчивостью и управляемостью, обеспечиваемой наличием несущей аэродинамической поверхности, образованной верхней 1 и нижней 2 ее частями. Перевод в режим полета, когда осуществляется зависание летательного аппарата над определенным объектом или участком местности, или с небольшими скоростями горизон 7 95262013.08.30 тального перемещения (до 5 м/с), осуществляется за счет гашения поступательной скорости изменением угла тангажа. Поскольку аэродинамическая поверхность в этом режиме не работает ввиду отсутствия набегающего воздушного потока, тягу двигателей увеличивают. При заходе летательного аппарата на посадку производится гашение поступательной скорости за счет увеличения угла тангажа отклонением элевонов 19 до достижения вертикальной составляющей скорости снижения 1-2 м/с к заданной точке приземления. Для дальнейшего увеличения полезной нагрузки заявляемый летательный аппарат предусматривает взлет с разбегом. При взлете с разбегом аппарат удерживается на месте до выхода двигателей на максимальный режим, например, с помощью упоров. Затем упоры убираются, производится старт, и летательный аппарат быстро разгоняется. Дополнительная подъемная сила при этом появляется за счет набегающего воздушного потока на несущие аэродинамические поверхности уже при разгоне, что и позволяет увеличить полезную нагрузку аппарата. Приемо-передающее устройство, снабженное антенной 25, служит для обеспечения полета беспилотных летательных аппаратов в автоматическом режиме по заданной программе. Заявленное техническое решение было реализовано при изготовлении беспилотного летательного аппарата вертикального взлета и посадки с несущей аэродинамической поверхностью. Корпус аппарата - двояковыпуклый полусимметричный профиль диаметром 2 м - был изготовлен из пенопласта ПС-60, покрытого сверху и снизу слоем стеклоткани толщиной 0,2 мм с пропиткой эпоксидным клеем ЭД-20. Под углом 45 к продольной оси аэродинамической поверхности в кольцевом канале размещена комплексная силовая установка,содержащая два электродвигателя 4020/07 мощностью 1400/1,9 Вт/л.с., максимальной частотой вращения 13500 мин-1. Воздушные винты фиксированного шага диаметром 0,406 и 0,380 м выполнены из углепластика. Тяга каждого винта при максимальных оборотах двигателя 13500 мин-1 составляет 4,5 кг, обоих воздушных винтов - 9 кг. Охлаждение электродвигателей воздушное. Регулятор оборотовзадает режим работы двигателей по команде с пульта управления , имеющего 14 каналов радиосвязи через приемо-передающую антенну приемо-передатчика летательного аппарата. В качестве электрохимического элемента питания применены две аккумуляторные батареи -5050 напряжением 14,5 В и емкостью 5 А/ч. Для приведения в действие органов управления,взаимодействующих с выходящим воздушным потоком, используются сервоприводы. Вес изготовленного летательного аппарата составил 7,119 кг. После изготовления проводили испытания летных характеристик полученного аппарата. Горизонтальную скорость полета определяли путем пролета фиксированного расстояния, равного 1000 м, туда и обратно, грузоподъемность определяли как максимально достигнутую разницу между взлетным весом и весом конструкции (7,119 кг) при скорости взлета 10 м/с, весовую отдачу вопределяли как отношение грузоподъемности к взлетному весу, угловую скорость определяли по времени разворота аппарата на 180 при энергичном отклонении руля поворота на максимальный угол. Достигнутые характеристики заявляемого аппарата в сравнении с прототипом приведены в таблице. Из таблицы видно, что максимальная горизонтальная скорость заявляемого летательного аппарата примерно в 3,5 раза больше, чем у прототипа, и возрастает при увеличении соотношения высоты профиля к диаметру аппарата за счет уменьшения лобового сопротивления. Заявляемый аппарат характеризуется также большей весовой отдачей при взлете с разбегом и большей маневренностью, поскольку позволяет осуществлять повороты с угловой скоростью 45-50 /с, что примерно в 3 раза больше, чем для прототипа. 95262013.08.30 Достигнутые характеристики летательного аппарата Параметры летательного ГоризонВесо- Угловая аппарата тальная вая скоПримечание отношение вы- угол стар- скорость п/п отда- рость,соты профиля к товой по- аппарата,ча,град/с км/ч диаметру зиции, град срыв набегающего 1 13 15 34 52,4 45-50 воздушного потока 2 14 15 56,6 56,7 45-50 3 14,5 15 58,9 56,7 45-50 4 15 15 62,2 56,7 45-50 5 16 15 65,8 52,4 45-50 малая подъемная сила малая подъемная сила,6 15 5 62,2 56,7 45-50 затруднен взлет из-за увеличения длины разбега 7 15 10 62,2 56,7 45-50 8 15 12 62,2 56,7 45-50 высокое лобовое сопротив 9 15 20 62,2 56,7 45-50 ление, затруднен взлет из-за увеличения длины разбега 10 прототип 17,0 42,5 10-15 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 9
МПК / Метки
МПК: B64C 29/00
Метки: вертикального, летательный, посадки, аппарат, взлета
Код ссылки
<a href="https://by.patents.su/9-u9526-letatelnyjj-apparat-vertikalnogo-vzleta-i-posadki.html" rel="bookmark" title="База патентов Беларуси">Летательный аппарат вертикального взлета и посадки</a>
Летательный аппарат вертикального взлета и посадки
Номер патента: U 8966
Опубликовано: 28.02.2013
Автор: Степанцов Михаил Макарович
МПК: B64C 29/00
Метки: взлета, летательный, вертикального, аппарат, посадки
Текст:
...аппарате не контактирует с наружным воздухом и движется только по кольцевому каналу. При этом, чем меньше поперечное сечение канала, тем выше скорость потока, и наоборот. Геометрический профиль воздушного канала повторяет профиль движущейся воздушной массы, что обеспечивает максимальное снижение энергетических потерь на рабочих режимах двигателей. У предлагаемого летательного аппарата практически отсутствуют аэродинамические потери,...
Беспилотный летательный аппарат
Номер патента: U 3919
Опубликовано: 30.10.2007
Авторы: Чаховский Юрий Николаевич, Луканин Геннадий Петрович
МПК: B64C 39/00, B64C 3/00
Метки: аппарат, летательный, беспилотный
Текст:
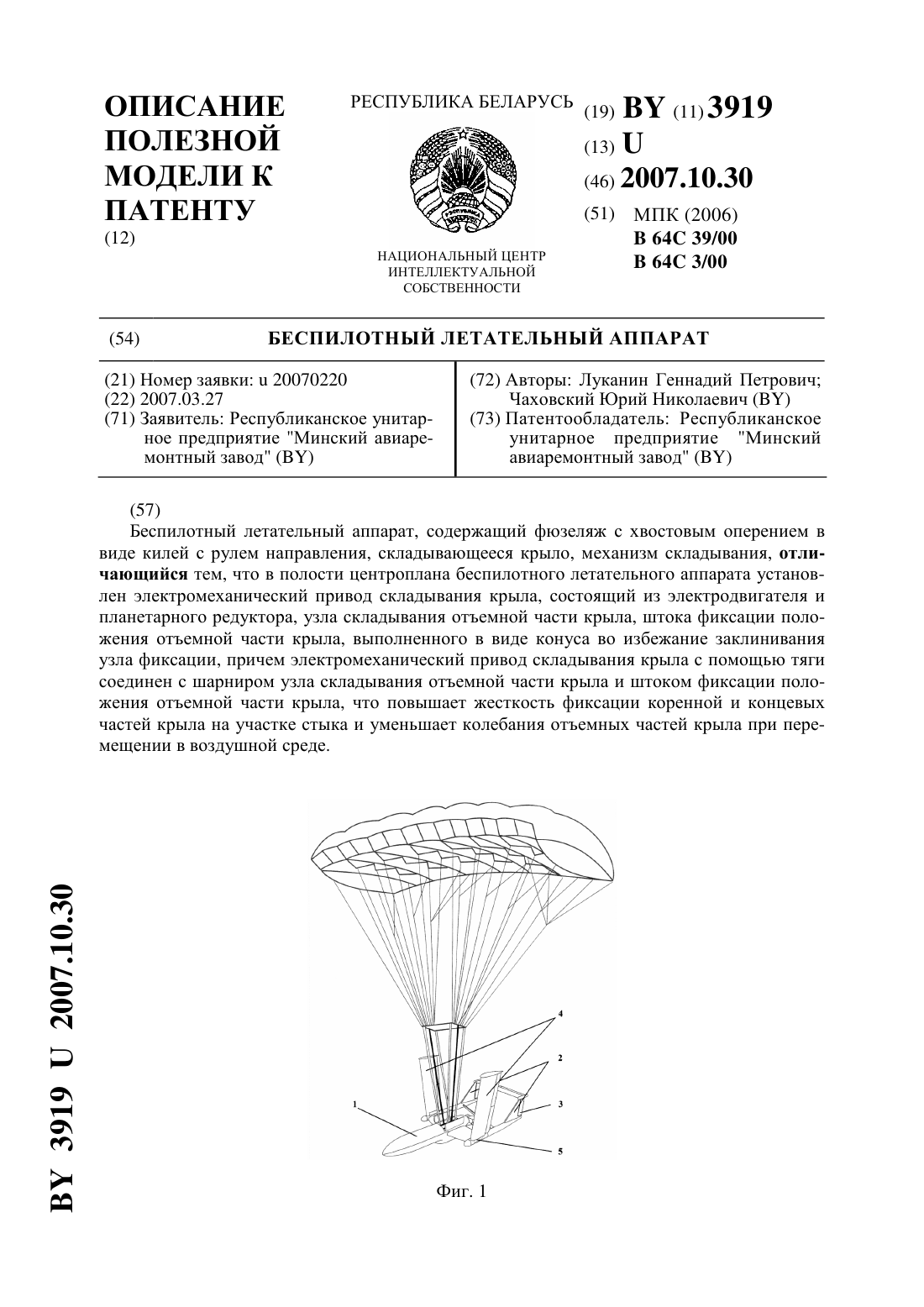
...согласно полезной модели в полости центроплана беспилотного летательного аппарата установлен электромеханический привод складывания крыла, состоящий из электродвигателя и планетарного редуктора, узла складывания отъемной части крыла, штока фиксации положения отъемной части крыла, выполненного в виде конуса во избежание заклинивания узла фиксации, причем электромеханический привод складывания крыла с помощью тяги соединен с шарниром...
Летательный аппарат
Номер патента: 4538
Опубликовано: 30.06.2002
Авторы: Кузнецов Владимир Васильевич, Сычик Василий Андреевич
МПК: B64C 27/10
Метки: летательный, аппарат
Текст:
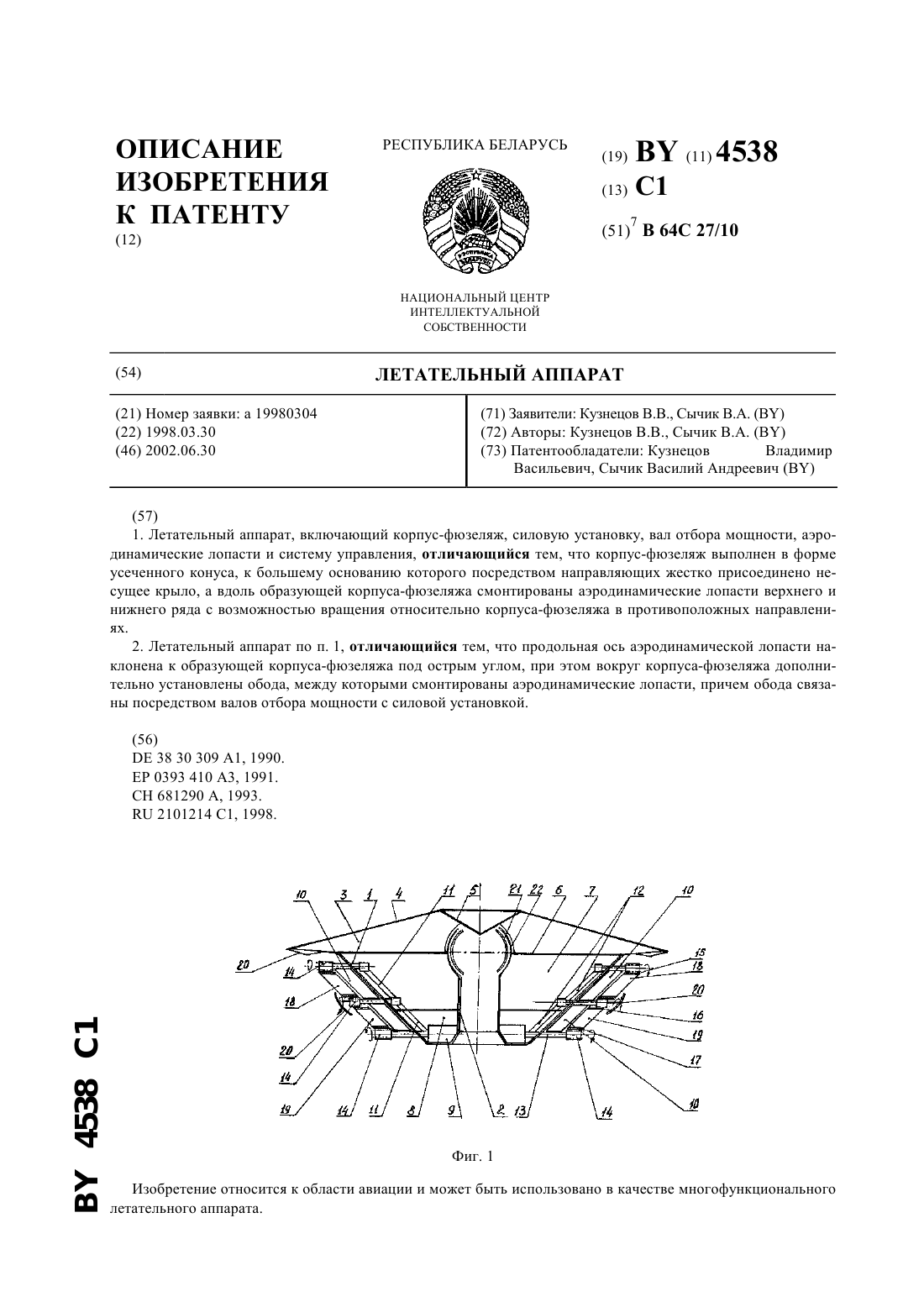
...В верхнем перекрытии 6 салона размещается аварийный люк, а в нижнем перекрытии 6 - доступ к силовым установкам 9. На наружной конической части корпуса-фюзеляжа закреплены лопасти 10 с механизмом поперечного наклона и постоянным углом атаки к противоположным аэродинамическим лопастям 18 и 19 вращения верхнего и нижнего ряда. Лопасти 10 с механизмом поперечного наклона обеспечивают движение, управление и маневрирование летательного аппарата....
Летательный аппарат

Номер патента: U 7820
Опубликовано: 30.12.2011
Авторы: Нарушевич Аркадий Александрович, Мишута Виктор Николаевич, Гущин Анатолий Леонидович, Мишута Дмитрий Викторович, Анохин Александр Михайлович, Гречихин Леонид Иванович
МПК: B64C 3/40
Метки: аппарат, летательный
Текст:
...характеристик, а также увеличение аэродинамического качества и прочностных характеристик замкнутого крыла. 2 78202011.12.30 Поставленная задача решается следующим образом. Предложен летательный аппарат,состоящий из фюзеляжа с хвостовым оперением и крылом, выполненным в виде замкнутого контура, причем крыло выполнено в виде эллипса в вертикальной плоскости, с горизонтальной большой осью и с соотношением осей 2,5-3,5, причем при...
Летательный аппарат
Номер патента: U 610
Опубликовано: 30.09.2002
Авторы: Коничев Алексей Викторович, Толмачев Вячеслав Иванович
МПК: B64C 29/00, B64C 27/00
Метки: аппарат, летательный
Текст:
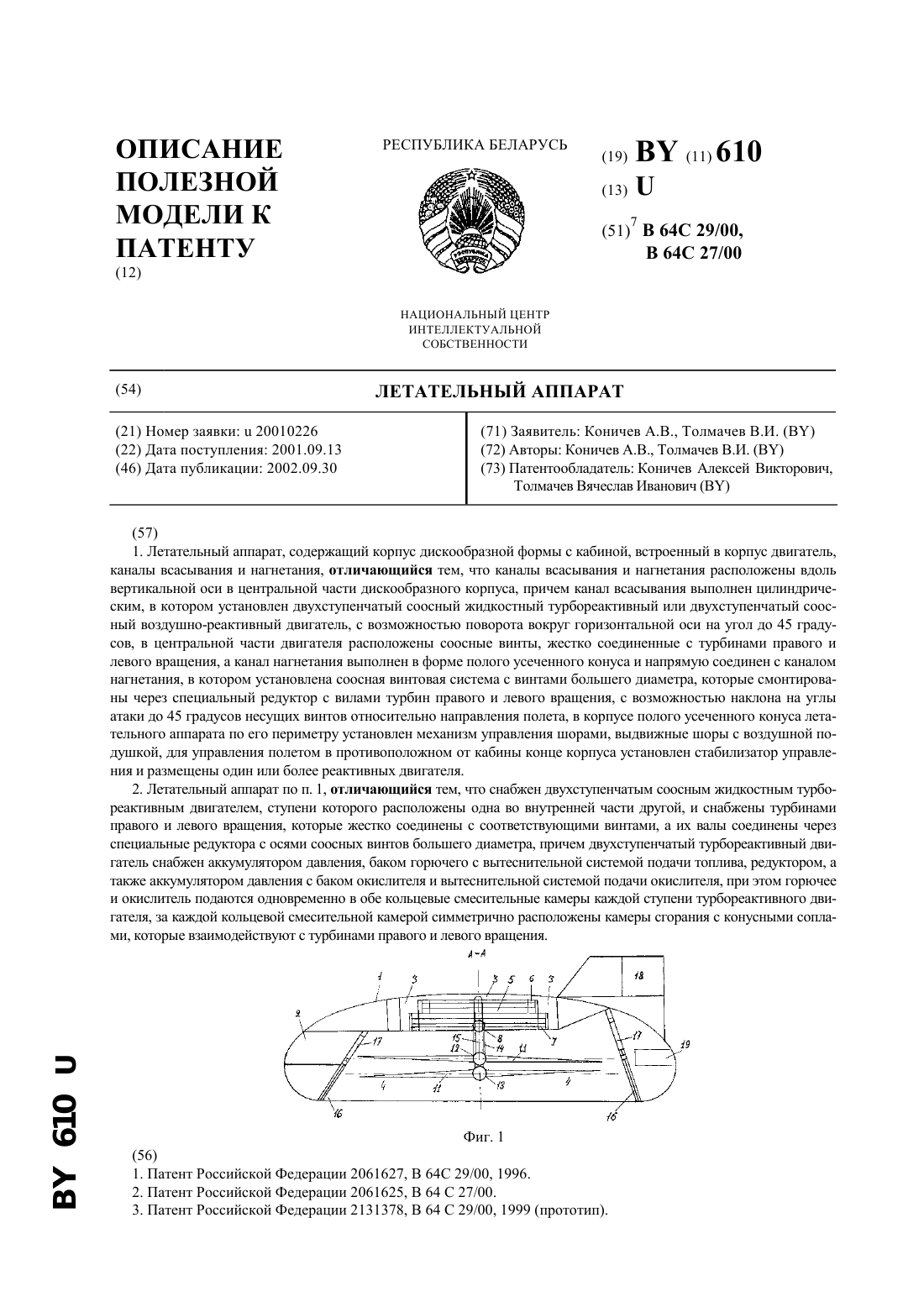
...нагнетания, отличающийся в следующих существенных признаках каналы всасывания и нагнетания выполнены вдоль вертикальной оси и расположены в центральной части дискообразного корпуса, такое расположение каналов имеет наименьшее сопротивление движению воздуха, т.к. процесс всасывания происходит вдоль одной вертикальной оси двумя винтами турбин правого и левого вращения и свободным зазором между корпусом летательного аппарата и двухступенчатым...
Предыдущий патент: Виброустойчивый интерферометр
Следующий патент: Бурозабивная свая
Случайный патент: Способ защиты летательного аппарата от радиоуправляемого оружия