Летательный аппарат вертикального взлета и посадки
Текст
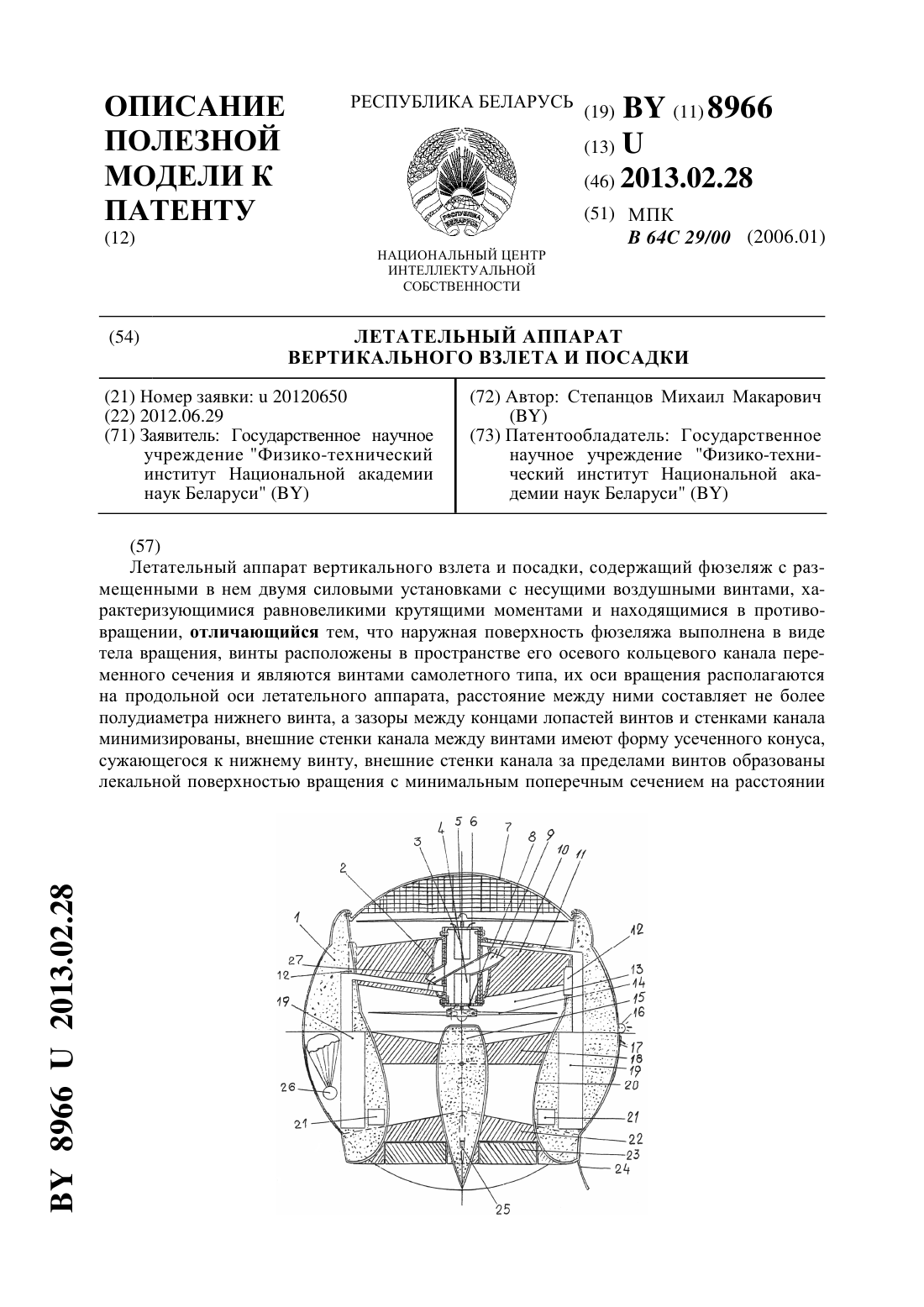
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ(71) Заявитель Государственное научное учреждение Физико-технический институт Национальной академии наук Беларуси(72) Автор Степанцов Михаил Макарович(73) Патентообладатель Государственное научное учреждение Физико-технический институт Национальной академии наук Беларуси(57) Летательный аппарат вертикального взлета и посадки, содержащий фюзеляж с размещенными в нем двумя силовыми установками с несущими воздушными винтами, характеризующимися равновеликими крутящими моментами и находящимися в противовращении, отличающийся тем, что наружная поверхность фюзеляжа выполнена в виде тела вращения, винты расположены в пространстве его осевого кольцевого канала переменного сечения и являются винтами самолетного типа, их оси вращения располагаются на продольной оси летательного аппарата, расстояние между ними составляет не более полудиаметра нижнего винта, а зазоры между концами лопастей винтов и стенками канала минимизированы, внешние стенки канала между винтами имеют форму усеченного конуса,сужающегося к нижнему винту, внешние стенки канала за пределами винтов образованы лекальной поверхностью вращения с минимальным поперечным сечением на расстоянии 89662013.02.28 полудиаметра нижнего винта и дальнейшим расширением на выходе канала, внутренние стенки канала между винтами образованы корпусом силовых установок, внутренние стенки канала за пределами винтов образованы телом вращения минимального аэродинамического сопротивления, наружная и внутренняя части аппарата соединены между собой пластинчатыми элементами, на которых установлены рули и элероны, взаимодействующие с выходящим воздушным потоком, а грузовые отсеки, находящиеся в фюзеляже за пределами кольцевого канала, содержат элементы питания, блоки управления, оборудования, размещенные с весовой компоновкой, обеспечивающей положение центра тяжести летательного аппарата ниже его геометрического центра на продольной оси.(56) 1. Бауэрс П. Летательные аппараты нетрадиционных схем Пер. с англ. - Мир, 1991. С. 95-96. 2. Бауэрс П. Летательные аппараты нетрадиционных схем Пер. с англ. - Мир, 1991. С. 96 (прототип). 3. Александров В.Г., Майоров Л.В., Потюков Н.П. Авиационный технический справочник (эксплуатация, обслуживание, ремонт и надежность). Изд. 2-е, перераб. и доп. М. Транспорт, 1975. - 432 с., рис. 134, табл. 117. 4. Чумак П.И., Крывокрысенко В.Ф. Расчет, проектирование и постройка сверхлегких самолетов. - М. Патриот, 1991. - 238 с. 5. Справочник пилота и штурмана гражданской авиации / Под ред. И.Ф.Васина. - М.,1988. - 319 с. Заявляемая полезная модель относится к области авиации и может быть использована при создании пилотируемых и беспилотных летательных аппаратов. Аналог - известный летательный аппарат вертикального взлета и посадки (вертолет) одновинтовой схемы несущего винта - создает подъемную силу, которая не зависит от поступательного движения летательного аппарата 1. Конструкция вертолета одновинтовой схемы включает одну или две силовые установки с общим редуктором, на валу которого установлен несущий винт с системой шарниров, которые обеспечивают отклонение оси вращения винта от вертикали для горизонтального перемещения и изменения угла наклона (угла атаки) лопастей несущего винта для создания необходимой подъемной силы. Вертолет имеет фюзеляж, в котором размещаются силовые установки с редуктором, оборудование, органы управления, узлы навески шасси. Для стабилизации и управления вертолетом относительно вертикальной оси по направлению движения в полете служит рулевой винт, который получает вращение от двигателя с помощью трансмиссии, проложенной по хвостовой балке. Недостатком данного летательного аппарата является сложность его конструкции. Несущий винт вертолета не связан непосредственно с двигателем, а приводится во вращение с помощью систем редукторов и валов. Лопасти винта крепятся к валу с помощью сложного шарнира. Недостатком вертолета в схеме с одним несущим винтом является тенденция фюзеляжа вращаться в противоположную сторону от направления вращения несущего винта, что требует отдачи части мощности силовой установки к хвостовому винту, который парирует этот момент и выполняет роль руля направления 2. Сложная трансмиссия передачи вращения от двигателя к рулевому винту, размещенная на хвостовой балке вертолета, утяжеляет конструкцию. При неисправности шасси, вертолет склонен к опрокидыванию на бок, что ведет к разрушению несущего винта. 89662013.02.28 При контакте вращающихся элементов - несущего или рулевого винта - с препятствиями происходит их разрушение, что ограничивает применение вертолета в ограниченном пространстве, например в городской черте. Конструктивная схема вертолета обуславливает энергетические потери силовой установки, характеризующиеся тем, что воздушный поток, отбрасываемый несущим винтом,перетекает по конечному размаху лопасти, контактируя с наружным воздухом и вызывает вихреобразование на концах лопастей. Это создает вредное сопротивление, снижающее несущие возможности винта вертолета, к которым добавляются потери, вызванные затратами мощности двигателя на редуцирование оборотов и передачи части мощности двигателя на хвостовой винт. Присутствуют также аэродинамические потери летательного аппарата, обусловленные обдувом элементов конструкции вертолета воздушным потоком, отброшенным несущим винтом при создании подъемной силы, что снижает коэффициент полезного действия винта. На вертолете для предотвращения аварийной ситуации практически невозможно применить средства спасения, например парашютные системы, без отделения от конструкции несущих лопастей или отделения кабины экипажа. Наиболее близким по технической сущности к заявляемой полезной модели, ее прототипом, является вертолет соосной схемы, когда два несущих винта на одном валу вращаются в противоположных направлениях с примерно равными крутящими моментами, что требует минимальных усилий на органах управления для его стабилизации относительно вертикальной оси и не требует присутствия в конструкции рулевого винта и хвостовой балки. Вертолет соосной схемы оснащается силовой (силовыми) установкой (установками) с редуктором и двумя соосными несущими винтами, которые располагаются на одном валу и вращаются в противоположных направлениях. Управление полетом осуществляется с помощью несущих винтов, которые отклоняются в требуемом направлении по командам пилота (оператора беспилотного летательного аппарата). Вертикальные аэродинамические поверхности, рули направления, дополняют систему управления и стабилизации по курсу 2. Вертолет соосной схемы не требует затрат мощности силовых установок на уравновешивание реактивных моментов несущих винтов. Конструктивная схема вертолета соосной схемы массивнее, имеет энергетические потери силовых установок на преодоление вредного сопротивления, которое характеризуется перетеканием воздуха по концевому размаху и вихреобразованием на концах лопастей несущих винтов, кроме того, имеет аэродинамические потери, связанные с обдувом элементов конструкции воздушным потоком от винтов, что снижает несущие возможности вертолета. Повреждение взлетно-посадочных устройств на посадке или контакт вращающихся винтов с препятствиями приводит к нарушению целостности конструкции, что может привести к преждевременному прекращению полета или разрушению летательного аппарата. Парашютные системы спасения вертолета соосной схемы (экипажа) могут быть задействованы при отстреле лопастей или вывода кабины летательного аппарата из зоны вращения винтов. Задачей предлагаемой полезной модели является повышение коэффициента полезного действия несущих винтов летательного аппарата вертикального взлета и посадки, включая повышение уровня безопасности при его эксплуатации. Поставленная задача решается тем, что в летательном аппарате вертикального взлета и посадки, содержащем фюзеляж с размещенными в нем двумя силовыми установками с несущими воздушными винтами, характеризующимися равновеликими крутящими моментами и находящимися в противовращении, наружная поверхность фюзеляжа выполнена в виде тела вращения, винты расположены в пространстве его осевого кольцевого канала переменного сечения и являются винтами самолетного типа, их оси вращения располагаются на продольной оси летательного аппарата, расстояние между ними составляет не более полудиаметра нижнего винта, а зазоры между концами лопастей винтов и стен 3 89662013.02.28 ками канала минимизированы, внешние стенки канала между винтами имеют форму усеченного конуса, сужающегося к нижнему винту, внешние стенки канала за пределами винтов образованы лекальной поверхностью вращения с минимальным поперечным сечением на расстоянии полудиаметра нижнего винта и дальнейшим расширением на выходе канала, внутренние стенки канала между винтами образованы корпусом силовых установок, внутренние стенки канала за пределами винтов образованы телом вращения минимального аэродинамического сопротивления, наружная и внутренняя части аппарата соединены между собой пластинчатыми элементами, на которых установлены рули и элероны, взаимодействующие с выходящим воздушным потоком, а грузовые отсеки, находящиеся в фюзеляже за пределами кольцевого канала, содержат элементы питания, блоки управления, оборудования, размещенные с весовой компоновкой, обеспечивающей положение центра тяжести летательного аппарата ниже его геометрического центра на продольной оси. Сущность заявленного технического решения заключается в снижении возможности перетекания воздуха по конечному размаху и вихреобразования на концах лопастей воздушных винтов, а также снижении потерь, обусловленных аэродинамическим сопротивлением элементов конструкции фюзеляжа. Воздушный винт (первого двигателя) при вращении вследствие взаимодействия его лопастей с воздухом в непосредственной близости перед плоскостью его вращения образует область пониженного давления, вызывающую ускорение впереди находящегося потока 3. Скорость потока возрастает на величину 1, в результате чего относительная скорость 1 в плоскости вращения винта становится равной(1) 101,где 0 - скорость невозмущенного потока,1 - осевая составляющая, вызванная самим винтом. На некотором расстоянии за винтом, равным примерно половине его диаметра, скорость потока возрастает до величины 2 202,(2) где 2 - составляющая скорости потока за винтом. Доказано и проверено на практике 4, что вызванная винтом скорость в его плоскости вдвое меньше вызванной скорости за винтом, то есть 12/2.(3) Вблизи винта устанавливается воронкообразная струя воздуха, поперечное сечение которой зависит от скорости воздуха там, где скорость воздуха больше, сечение струи становится меньше. Обычно полное сжатие струи, отброшенной винтом, наблюдается на расстоянии, равном половине диаметра винта, причем вследствие минимального зазора между концом лопасти воздушного винта и стенкой канала перетекание воздуха, отброшенного винтом к концевому размаху, минимизировано, что уменьшает энергетические потери воздушного потока. В предлагаемом летательном аппарате вторая силовая установка с воздушным винтом противоположного вращения относительно первого винта, который расположен на расстоянии меньше половины диаметра первого воздушного винта, в непосредственной близости перед винтом встречает отброшенный поток воздуха от первого винта, ускоренный с избыточным давлением, причем в результате взаимодействия с вращающимися лопастями первого винта, отклоненный - в результате этого взаимодействия в сторону вращения воздушного винта. При взаимодействии со вторым воздушным винтом противоположного направления вращения воздушный поток получает дальнейшее ускорение, так как углы установки лопастей второго воздушного винта примерно в два раза больше углов установки первого, а противоположное направление вращения винта с оборотами, равными оборотам первого 4 89662013.02.28 винта, оказывает на воздушный поток такое же отклонение от направления движения, как и первого, в результате чего после второго воздушного винта направление движения воздушного потока в кольцевом канале спрямляется, при этом дополнительную энергию потоку создает возросшее давление воздуха, отброшенного при вращении винтов в пространство между концевым размахом лопасти и стенкой кольцевого канала и при отсутствии перетекании воздуха на верхнюю поверхность вращающейся лопасти винта, под ней возникает вихрь области повышенного давления, который способствует разгону потока в кольцевом пространстве летательного аппарата. Двигаясь по кольцевому каналу, спрямленный воздушный поток на расстоянии половины диаметра второго винта получает максимальное ускорение. В предлагаемом летательном аппарате после суживающегося пространства, где произошло максимальное ускорение воздушного потока, начинается расширяющееся пространство кольцевого канала, характеризующегося тем, что скорость потока снижается, а давление возрастает, и на выходе это давление передается на стенки нижней части корпуса летательного аппарата, что создает дополнительную составляющую силы тяги. Возрастание силы тяги происходит и за счет разности скоростей входа воздуха в пространство над первым воздушным винтом и скорости истечения воздушной струи из кольцевого канала летательного аппарата на выходе. Соединительные пластинчатые элементы, на которых навешаны рули высоты, отклоняющие продольную ось летательного аппарата для создания горизонтальной составляющей силы тяги, и элероны, управляющие по крену относительно продольной оси, расположены в нижней части расширяющегося пространства на максимально возможном расстоянии от центра тяжести, что увеличивает их эффективность и снижает балансировочное сопротивление при отклонении этих поверхностей. Воздушный поток от винтов в предлагаемом летательном аппарате не контактирует с наружным воздухом и движется только по кольцевому каналу. При этом, чем меньше поперечное сечение канала, тем выше скорость потока, и наоборот. Геометрический профиль воздушного канала повторяет профиль движущейся воздушной массы, что обеспечивает максимальное снижение энергетических потерь на рабочих режимах двигателей. У предлагаемого летательного аппарата практически отсутствуют аэродинамические потери, связанные с обдувом элементов конструкции летательного аппарата - фюзеляжа,шасси, наружных подвесок и др. Реактивный момент вращения верхнего винта гасится таким же моментом, возникающим при вращении нижнего винта в противоположном направлении. Расположенные в кольцевом канале, в его расширяющейся части соединительные пластинчатые элементы с навешанными на них рулями высоты и элеронами управляют аппаратом в продольном (по высоте) и в боковом (по крену и курсу) отношениях. В предлагаемой конструкции летательного аппарата отсутствуют вертолетные лопасти,хвостовой винт и конструктивные системы передачи вращения на них, хвостовая балка,взлетно-посадочные устройства - шасси, а также рули направления с килем. Это упрощает конструкцию предлагаемого летательного аппарата и снижает его массу. Безопасность при эксплуатации предлагаемого летательного аппарата обеспечивается следующим. Двигатели с воздушными винтами размещаются внутри фюзеляжа по продольной оси летательного аппарата, что практически исключает их повреждение при контакте с посторонними предметами в процессе полета, например деревьями, у предлагаемого летательного аппарата в полете при встрече с препятствиями со скоростью сближения до 2 м/сек не происходит нарушение целостности конструкции или потеря устойчивости и управляемости, т.к. отсутствуют выступающие за пределы корпуса аппарата вращающиеся и подвижные элементы, при этом силой противодействия аппарат оттолкнется от препятствия,изменив направление движения, сохранив устойчивость и управляемость. Боковые по 5 89662013.02.28 верхности аппарата также могут служить поверхностями приземления. При приземлении аппарата с нерасчетными перегрузками, вызывающими повреждения поверхности конструкции - восстановление его летной годности, производится с минимальными финансовыми затратами и в короткие сроки. При нарушении целостности аппарата, когда теряется устойчивость и управляемость,приземление производится с помощью парашюта. Заявленная полезная модель поясняется фигурой, где изображена схема заявляемого летательного аппарата вертикального взлета и посадки. Цифрами на чертеже обозначены Как видно из чертежа, заявляемый летательный аппарат вертикального взлета и посадки состоит из фюзеляжа 1 с размещенными в нем двумя силовыми установками 3 и 4, с несущими воздушными винтами 5 и 14, расположенными в пространстве осевого кольцевого канала 13, внешние стенки канала 20 образованы конической и лекальной поверхностями, внутренние стенки образованы корпусом силовых установок 2 и веретенообразным телом обтекания минимального аэродинамического сопротивления 15, наружная и внутренняя поверхности соединены пластинчатыми элементами 10, 18, 22, имеющими внутренние каналы подвода коммуникации на верхних 11, с навешанными на нижних пластинчатых элементах рулях высоты 23, и элеронах 25. Внутри фюзеляжа боковых поверхностей, выполненных из пористых материалов, в ложементах размещаются электрохимические элементы питания 19, блоки управления - регулятор оборотов 12, сервоприводы 21, управление рулями и элеронами, парашютная система 26. Для дистанционного радиоуправления аппаратом на фюзеляже расположена антенна приемо-передатчика 24,включатель электрической цепи 17 и лампочка сигнализации наличия питания 16. Предлагаемый летательный аппарат вертикального взлета и посадки выполняет полет следующим образом. После включения на аппарате тумблера 17 включение и загорания сигнальной лампы 16, оператор наземного пункта управления подает сигнал на запуск двигателей 2, 3 и раскручивает воздушные винты 5, 14. При вращении воздушного винта первого двигателя вследствие взаимодействия его лопастей с воздухом в непосредственной близости перед плоскостью его вращения образуется область пониженного давления, вызывающая ускорение впереди находящегося потока в плоскости вращения винта. Скорость потока возрастает за счет осевой составляющей, вызванной самим винтом, а на некотором расстоянии в суживающемся канале, где установлен второй воздушный винт, скорость потока, отброшенного первым воздушным винтом, приближается к максимальной. Второй воздушный винт, имеющий углы установки лопастей примерно в два раза больше, чем у первого, и принимающий ускоренный воздушный поток от первого винта, закрученный в сторону его вращения, обеспечивает практически одинаковое аэродинамическое воздействие на этот поток, как и первый воздушный винт, но при противоположном вращении относительно первого. В результате такого взаимодействия воздушный поток закручивается в противоположном направлении и при равных крутящих моментах воздушных винтов спрямляется. На расстоянии полудиаметра второго винта воздушный поток получает максимальное ускорение и сжимается. Практически на этом расстоянии от винта выполнено максимальное сужение кольцевого канала для поддержания в оптимальном режиме энергии воздушного потока, величина поперечного сечения которого зависит от скорости его движения скорость больше - сечение меньше, и наоборот 3. К нижней части аппарата после максимального сужения кольцевой канал расширяется, что ведет к уменьшению скорости потока и соответственно к возрастанию давления на стенки кольцевого канала. Аэродинамические органыуправления, элероны и рули высоты, взаимодействующие с выходящим потоком, управляют летательным аппаратом по направлению движения. При неравенстве крутящих моментов воздушных винтов возникает вращение летательного аппарата относительно вертикальной оси, которое устраняется увеличением частоты вращения винта, противоположного возникшему вращению летательного аппарата, или гасится с помощью элеронов, которые при противоположном отклонении образуют соответству 6 89662013.02.28 ющие аэродинамические силы. Рули высоты при взаимодействии с выходящим потоком отклоняют продольную ось летательного аппарата от вертикали, причем создается горизонтальная составляющая силы тяги, которая вызывает перемещение летательного аппарата по горизонту. Аппарат, лежащий на поверхности, когда точка касания находится на линии продольной оси, перпендикулярной к плоскости вращения винтов, за счет создания движителями силы тяги, превышающей вес летательного аппарата, совершает отрыв от поверхности касания и взлетает в воздушное пространство. В случае, когда летательный аппарат находится на неровной поверхности и лежит на боку, под действием момента сил, который создается силой тяги на плече до центра тяжести аппарата, происходит восстановление положения аппарата к линии, когда его продольная ось займет вертикальное положение, т.е. произойдет самовосстановление за счет смещенного центра тяжести, при котором аппарат взлетает вертикально. С помощью рулей и элеронов визуально аппарат ориентируется по высоте и направлению движения оператором наземного пульта, а его скорость перемещения регулируется оборотами силовых установок и наклоном продольной оси к линии горизонта. Для совершения посадки аппарат подводится к месту приземления и оператор,уменьшая несущую составляющую воздушных винтов обеспечивает плавное приземление на наружную поверхность аппарата, при этом, имея смещенный центр тяжести, аппарат будет касаться поверхности приземления нижней полусферой. Полет в автоматическом режиме по заданной программе может производиться, если на летательном аппарате установлена бортовая аппаратура приема и передачи данных,пилотно-навигационный комплекс, радиомаяк. При нарушении устойчивости и управляемости летательного аппарата, когда происходит неуправляемое снижение с нерасчетными вертикальными скоростями, оператором с пульта наземного управления подается команда на включение посадочного парашюта. Заявляемое техническое решение было реализовано при изготовлении беспилотного летательного аппарата вертикального взлета и посадки. Фюзеляж шарообразной формы диаметром 600 мм был изготовлен из пенопласта ПВХ-5 и покрыт слоем стеклоткани толщиной 0,2 мм с пропиткой эпоксидным клеем ЭД 20. Защитная сетка изготовлена из полимерного материала толщиной 0,5 мм, прикреплена винтами. Наружная и внутренняя части фюзеляжа соединены профилированными элементами,внутри которых имеются каналы для прокладки электропроводки. Соединительные элементы усилены фанерными вставками. Пространство воздушного канала выполнено в виде прочной оболочки, армированной стеклотканью. Внутри его размещены два электродвигателя ЕМАХ 4020/07 мощностью 1400/1,9 вт/л.с., характеризующиеся максимальной частотой вращения 13500 мин-1. На втулках электродвигателей смонтированы верхний воздушный винт фиксированного шага диаметром 0,406 м и нижний диаметром 0,306 м, противоположного вращения. Охлаждение каждого электродвигателя индивидуальное, тяга винта при максимальных оборотах электродвигателя составляет - 4,5 кг при 13500 об/мин, обоих - 9 кг. Регулятор оборотовзадает режим работы двигателя по командам с пульта управления, имеющего 14 каналов радиосвязи. В качестве электрохимического элемента питания применены две аккумуляторные батареи -5050 напряжением 14,5 В и емкостью 5 А/ч. Летательный аппарат испытывали следующим образом. Масса аппарата составляет 4,607 кг. Тяга воздушных винтов на максимальных оборотах в минуту 13500 составила 4,529 кг. Для подъема аппарата в воздух вертикально вверх потребная тяга должна превышать вес летательного аппарата или быть около 5 кг, что при 6000-7000 об/мин двигателей гарантирует вертикальный взлет. 7 89662013.02.28 Для придания аппарату горизонтального перемещения, необходимо плоскость вращения винта отклонить от вертикали на 5-7 первоначально. Так как наклонная составляющая силы тяги не обеспечивает создание полной подъемной силы, равной весу аппарата,требуется увеличение мощности силовых установок. Поэтому после отклонения рулей высоты на горизонтальный полет и с началом поступательного движения аппарата обороты электродвигателей увеличивают на 7-10 , обеспечивая полет аппарата без снижения и без набора высоты. Для контроля пространства над заданной точкой поверхности земли, линии электропередач, перекрестков дорог и др. летательный аппарат переводится в режим висения, а его стабилизация по высоте и направлению производилась соответствующим отклонением рулей и элеронов. Для выполнения посадки летательный аппарат подводится к месту приземления и с режима висения путем уменьшения величины составляющей силы тяги с вертикальной скоростью снижения до 1 м/с осуществляет посадку или снимается в воздухе руками, с последующим выключением тумблера включения электросети. Горизонтальное перемещение аппарата производится при отклонении вертикальной оси аппарата с помощью рулей высоты. Расчет скорости горизонтального перемещения производится по формулам классической аэродинамики 4. У предлагаемого аппарата со смещенным центром масс относительно большого диаметра шара в полете подъемная силауравновешивает массу аппарата , т.е..(4) Силу лобового сопротивления аппаратадолжна уравновесить составляющая полной аэродинамической силы , приложенная в центре масс - сила тяги , которая зависит от угла отклоненияот вертикальной оси и рассчитывается как(5)Рили. Применяем формулу расчета полного аэродинамического сопротивления летательного аппарата.2(6),2 где- полное лобовое сопротивление летательного аппарата- коэффициент аэродинамического сопротивления, для шара принят равным 0,3. Так как предлагаемый летательный аппарат шарообразной формы имеет не гладкую, а с неровностями поверхность этот коэффициент увеличиваем вдвое - до 0,6- плотность воздуха, равная 0,125 кг/м 3- площадь тела обтекания - шара, равная 2- диаметр шара, равный 0,6 м. Так как, из формулы (6) определяем горизонтальную скорость перемещения при угле 6 2(8) 0,60,1253,14(0,6) 2 При угле у 12 поступательная скорость составит около 17 км/ч и т.д. Показателем массового совершенства конструкции предлагаемого летательного аппарата вертикального взлета и посадки является весовая отдача, которая определяется как отношение полезной нагрузки к взлетной массе летательного аппарата, умноженное на 89662013.02.28 1005. Достигнутые характеристики заявляемого аппарата приведены в табл. 1 и 2. В качестве прототипа принят вертолет Ка-26. Как видно из табл. 1 и 2, по весовой отдаче предлагаемый аппарат имеет более высокую эффективность. Видеоаппаратура, которая может быть расположена на аппарате при нахождении его на высоте 1 км при угле обзора 110, позволяет получить изображение пространства в радиусе 8 км, на высоте 2 км - в радиусе 16 км, на высоте 3 км - в радиусе 24 км, если метеоусловия не ограничивают видимость. Таблица 1 Сравнительные характеристики летательных аппаратовп /п Максимальная коммерческая нагрузка (кг) 900,0 Таблица 2 Весовые характеристики изготовленного летательного аппарата вертикального взлета и посадки Наружный корпус Внутренний корпус Защитная сетка Соединительные элементы с рулями Всего Силовая установка Электродвигатель 2 285 Регулятор оборотов 2 80 Воздушный винт 2 30 Всего Система электропитания Аккумулятор 2 554 Электропровода 2 компл. 250 Всего Бортовое радиоэлектрооборудование, средства спасения Рулевые машинки 4 45 Антенна 2 26 Радиомаяк с антенной 1 75 Макет ТВ- системы 1 55 Парашют 1 187 Всего Итого 89662013.02.28 Из анализа приведенных данных видно, что заявленный летательный аппарат вертикального взлета и посадки в совокупности отличительных признаков обеспечивает достижение положительного эффекта, который заключается в повышении коэффициента полезного действия воздушных винтов, установленных в закрытом кольцевом канале переменного сечения в расширении возможностей применения летательного аппарата в пространстве с препятствиями в повышении безопасности при эксплуатации по причине отсутствия выступающих и вращающихся подвижных элементов конструкции аппарата наружу. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B64C 29/00
Метки: вертикального, взлета, аппарат, посадки, летательный
Код ссылки
<a href="https://by.patents.su/10-u8966-letatelnyjj-apparat-vertikalnogo-vzleta-i-posadki.html" rel="bookmark" title="База патентов Беларуси">Летательный аппарат вертикального взлета и посадки</a>
Летательный аппарат
Номер патента: U 610
Опубликовано: 30.09.2002
Авторы: Коничев Алексей Викторович, Толмачев Вячеслав Иванович
МПК: B64C 27/00, B64C 29/00
Метки: аппарат, летательный
Текст:
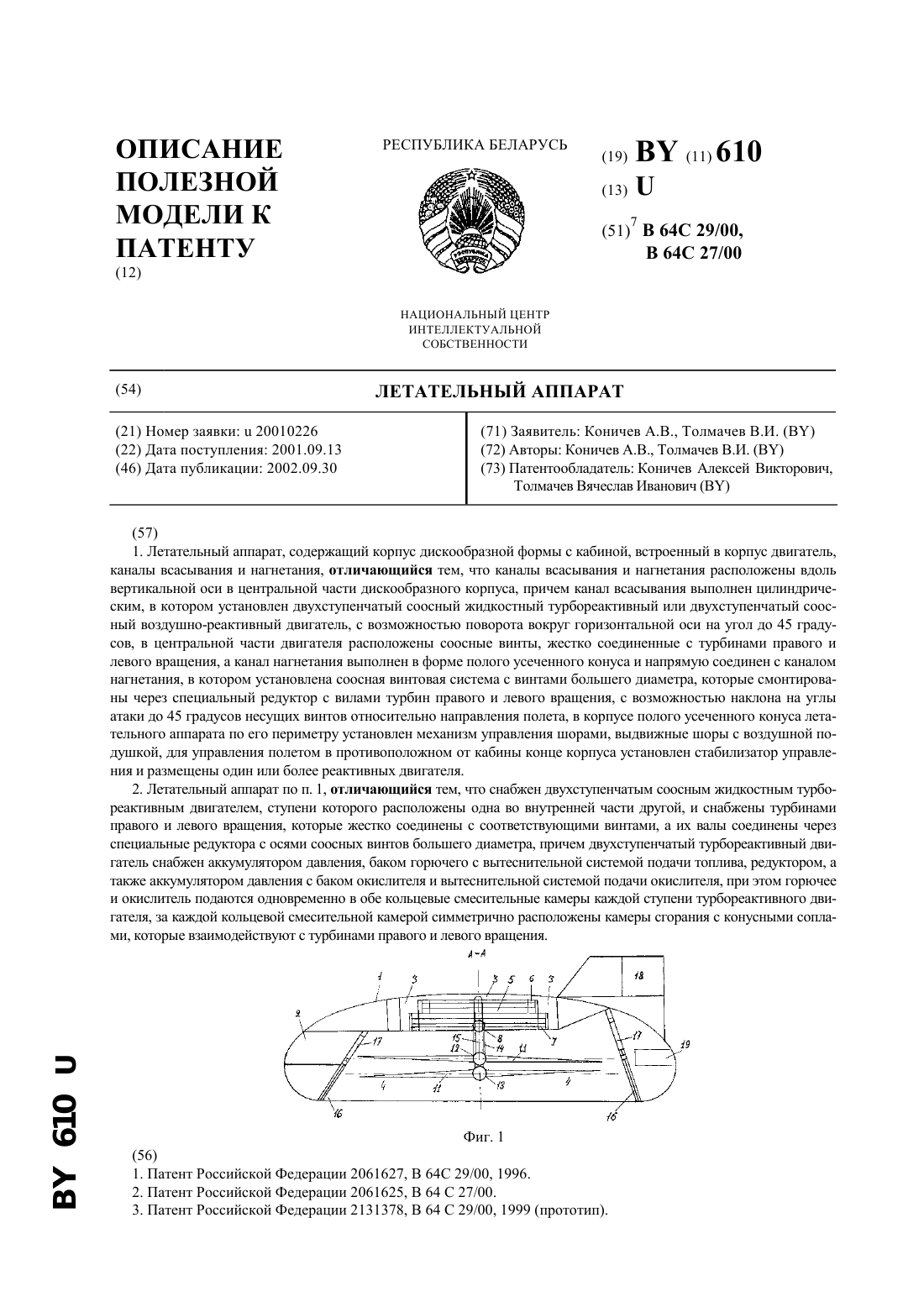
...нагнетания, отличающийся в следующих существенных признаках каналы всасывания и нагнетания выполнены вдоль вертикальной оси и расположены в центральной части дискообразного корпуса, такое расположение каналов имеет наименьшее сопротивление движению воздуха, т.к. процесс всасывания происходит вдоль одной вертикальной оси двумя винтами турбин правого и левого вращения и свободным зазором между корпусом летательного аппарата и двухступенчатым...
Беспилотный летательный аппарат
Номер патента: U 3919
Опубликовано: 30.10.2007
Авторы: Чаховский Юрий Николаевич, Луканин Геннадий Петрович
МПК: B64C 39/00, B64C 3/00
Метки: аппарат, летательный, беспилотный
Текст:
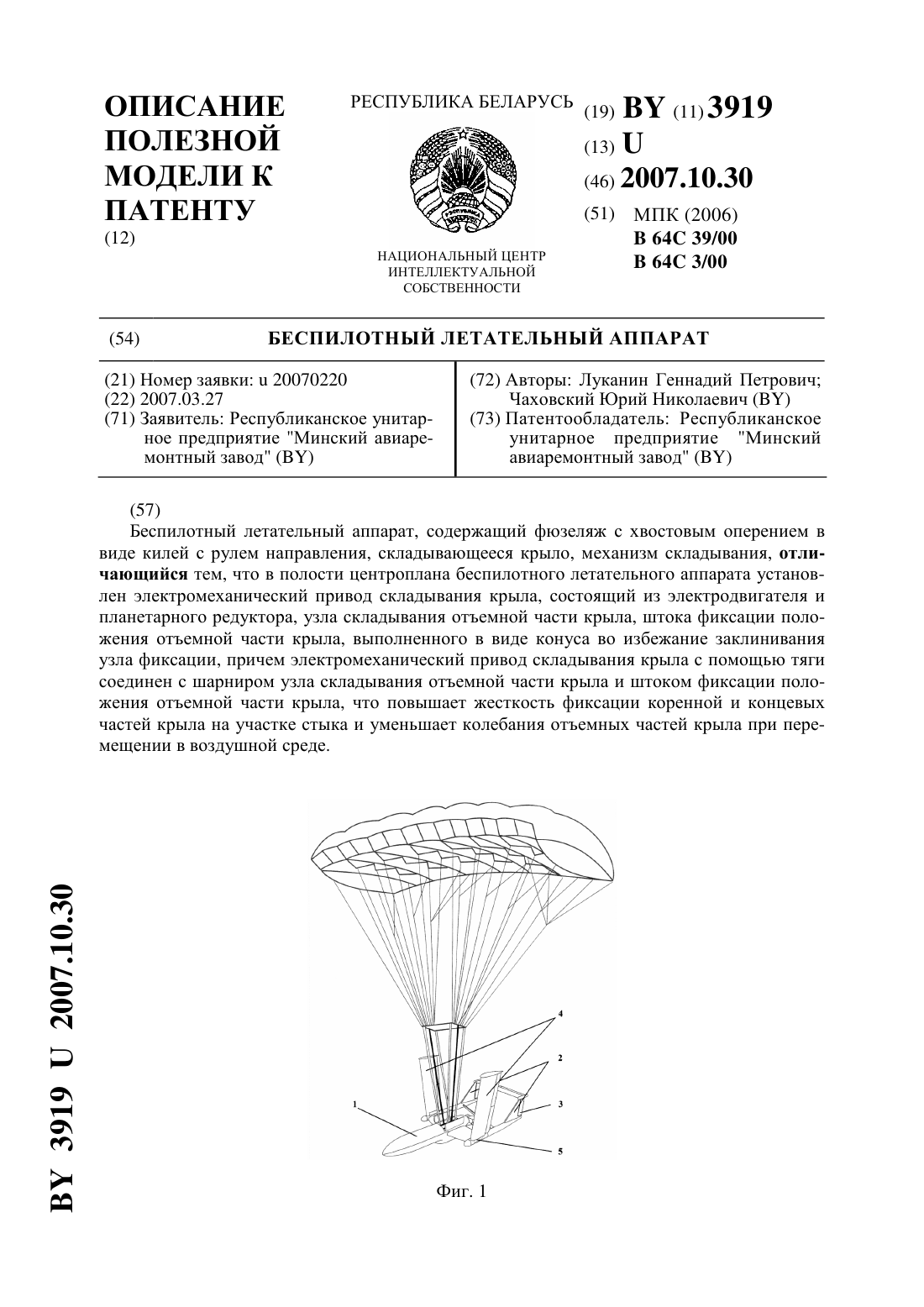
...согласно полезной модели в полости центроплана беспилотного летательного аппарата установлен электромеханический привод складывания крыла, состоящий из электродвигателя и планетарного редуктора, узла складывания отъемной части крыла, штока фиксации положения отъемной части крыла, выполненного в виде конуса во избежание заклинивания узла фиксации, причем электромеханический привод складывания крыла с помощью тяги соединен с шарниром...
Летательный аппарат
Номер патента: 4538
Опубликовано: 30.06.2002
Авторы: Сычик Василий Андреевич, Кузнецов Владимир Васильевич
МПК: B64C 27/10
Метки: аппарат, летательный
Текст:
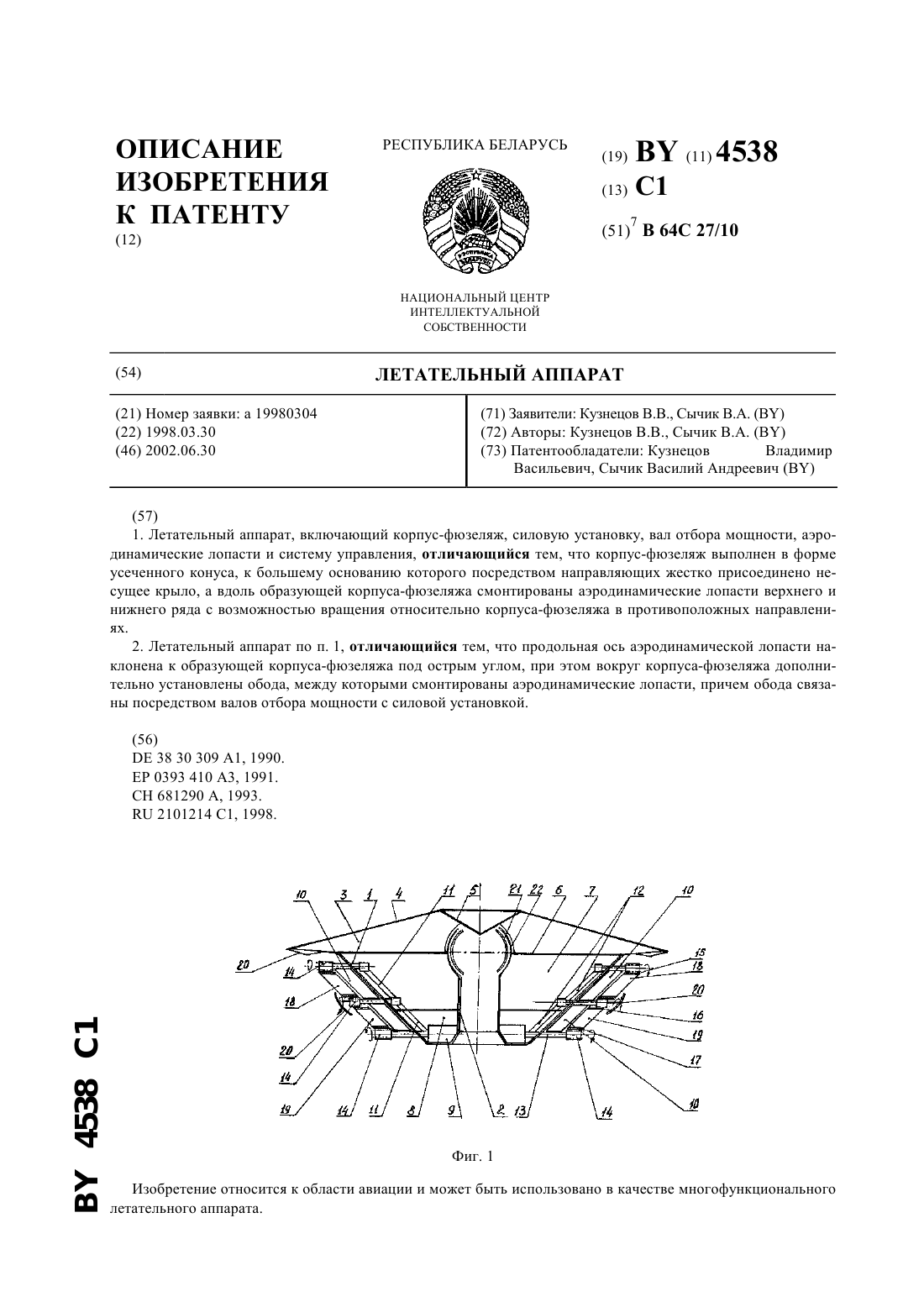
...В верхнем перекрытии 6 салона размещается аварийный люк, а в нижнем перекрытии 6 - доступ к силовым установкам 9. На наружной конической части корпуса-фюзеляжа закреплены лопасти 10 с механизмом поперечного наклона и постоянным углом атаки к противоположным аэродинамическим лопастям 18 и 19 вращения верхнего и нижнего ряда. Лопасти 10 с механизмом поперечного наклона обеспечивают движение, управление и маневрирование летательного аппарата....
Летательный аппарат

Номер патента: U 7820
Опубликовано: 30.12.2011
Авторы: Гречихин Леонид Иванович, Нарушевич Аркадий Александрович, Мишута Виктор Николаевич, Гущин Анатолий Леонидович, Мишута Дмитрий Викторович, Анохин Александр Михайлович
МПК: B64C 3/40
Метки: аппарат, летательный
Текст:
...характеристик, а также увеличение аэродинамического качества и прочностных характеристик замкнутого крыла. 2 78202011.12.30 Поставленная задача решается следующим образом. Предложен летательный аппарат,состоящий из фюзеляжа с хвостовым оперением и крылом, выполненным в виде замкнутого контура, причем крыло выполнено в виде эллипса в вертикальной плоскости, с горизонтальной большой осью и с соотношением осей 2,5-3,5, причем при...
Летательный аппарат
Номер патента: U 1844
Опубликовано: 30.03.2005
Автор: Северянин Виталий Степанович
МПК: B64B 29/00, B64B 27/00
Метки: аппарат, летательный
Текст:
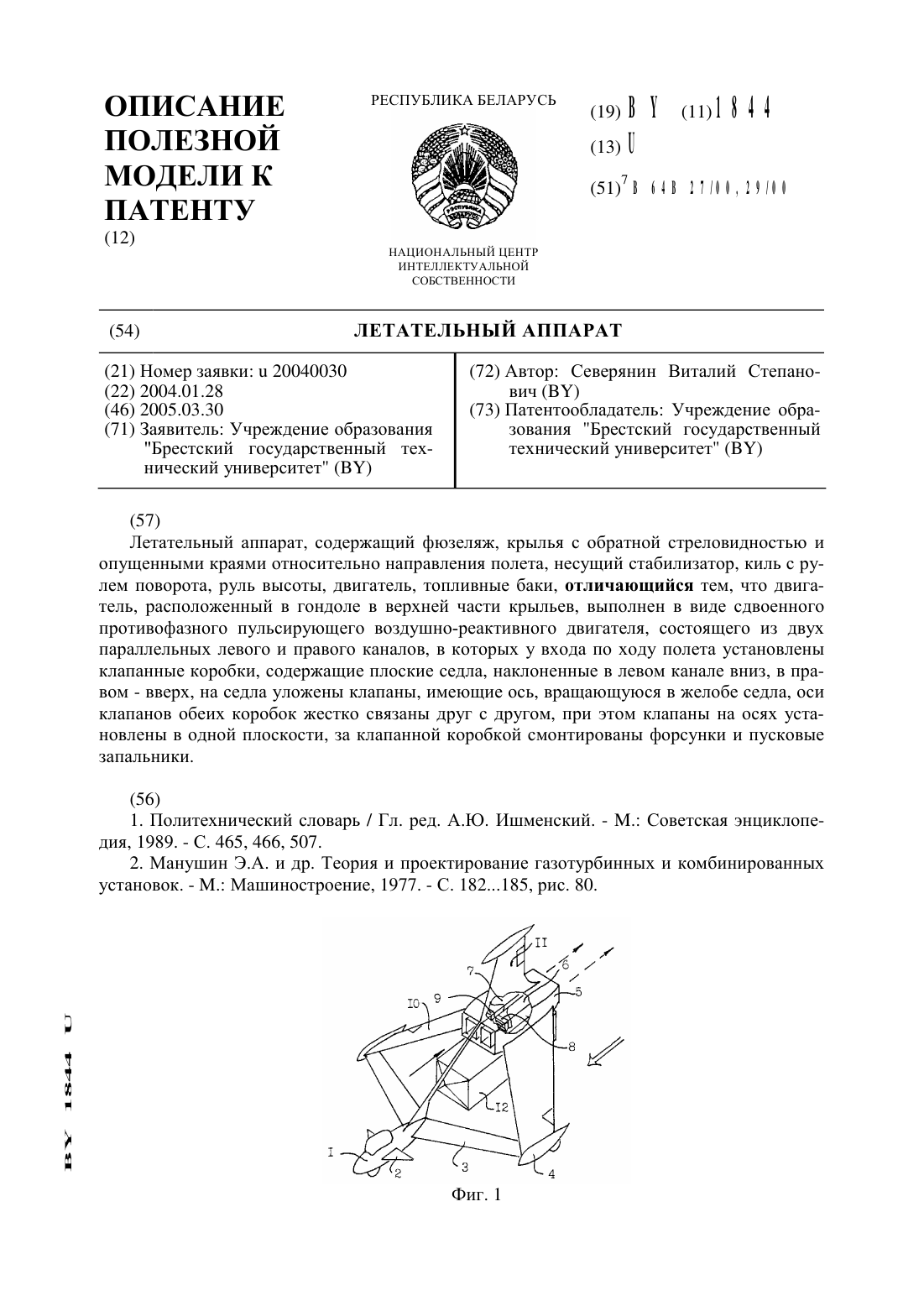
...за наклонной коробкой смонтированы форсунки и пусковые запальники, двигатель смонтирован в гондоле в верхней части крыльев.На чертеже показана принципиальная схема летательного аппарата (фиг. 1), сечение по клапанной коробке левого канала ПуВРД (фиг. 2) и по клапанной коробке правого канала ПуВРД (фиг 3). Обозначения фюзеляж - 1, руль высоты - 2, несущий стабилизатор 3, топливный бак - 4, гондола - 5, левый канал ПуВРД - 6, правый канал...
Предыдущий патент: Устройство приема и обработки фазоманипулированных сигналов с псевдослучайной перестройкой рабочей частоты
Следующий патент: Светодиодная матрица для вывода цифровых изображений
Случайный патент: Порошковый материал на основе железа