Телескопическая вышка
Номер патента: U 5449
Опубликовано: 30.08.2009
Авторы: Плясунов Александр Иванович, Кротиков Сергей Петрович, Алампиев Олег Александрович, Андросенко Александр Павлович
Текст
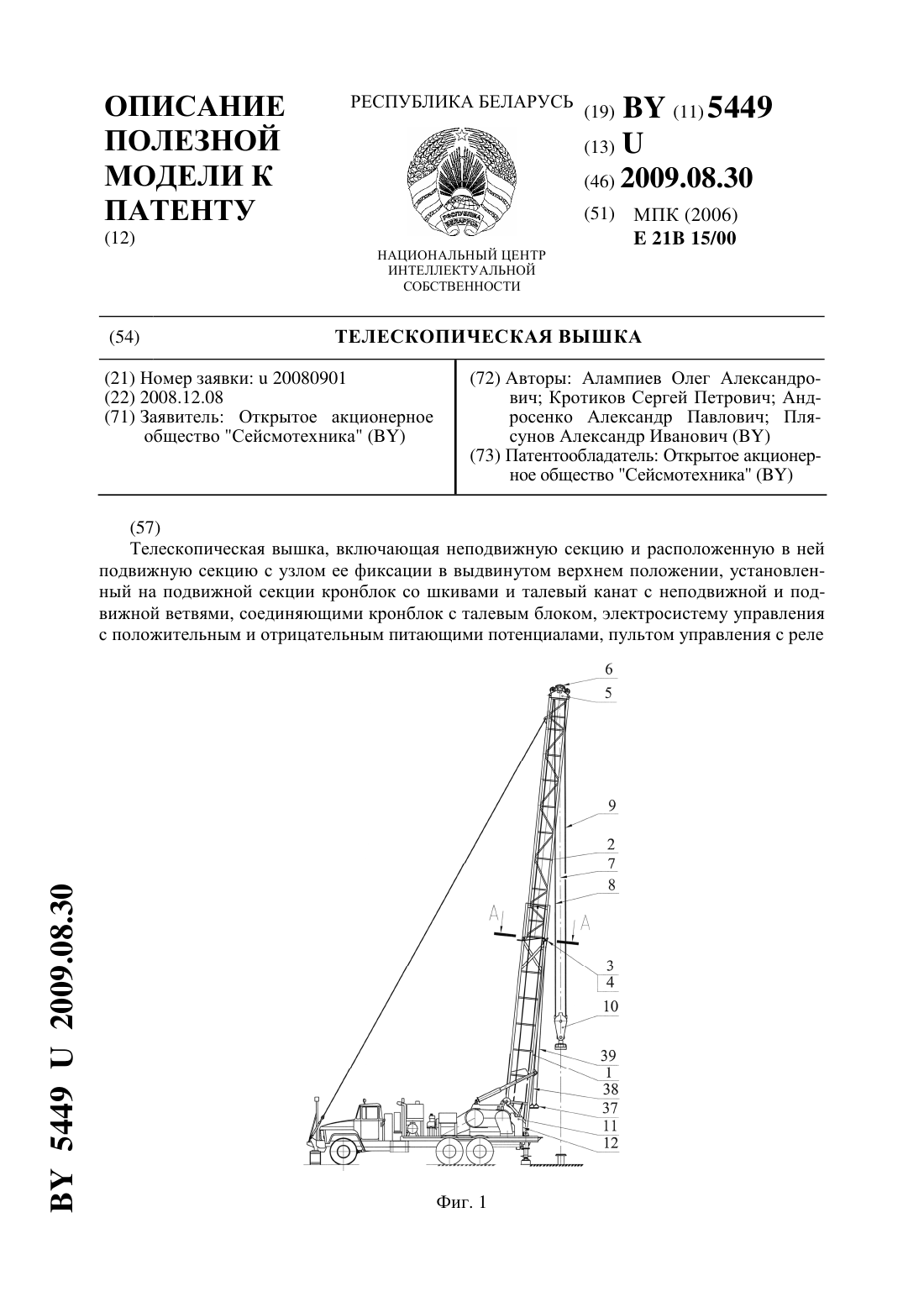
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Открытое акционерное общество Сейсмотехника(72) Авторы Алампиев Олег Александрович Кротиков Сергей Петрович Андросенко Александр Павлович Плясунов Александр Иванович(73) Патентообладатель Открытое акционерное общество Сейсмотехника(57) Телескопическая вышка, включающая неподвижную секцию и расположенную в ней подвижную секцию с узлом ее фиксации в выдвинутом верхнем положении, установленный на подвижной секции кронблок со шкивами и талевый канат с неподвижной и подвижной ветвями, соединяющими кронблок с талевым блоком, электросистему управления с положительным и отрицательным питающими потенциалами, пультом управления с реле 54492009.08.30 блокировки отключения хода талевого блока, магнитоэлектрический датчик с нормально разомкнутыми контактами и постоянным магнитом, отличающаяся тем, что она снабжена автоматической системой ограничения подъема талевого блока с реле удержания,включающей управляющую катушку и нормально разомкнутые контакты, а постоянный магнит магнитоуправляемого датчика установлен на подпружиненной в сторону кронблока направляющей, кинематически связанной с расположенным на неподвижной ветви талевого каната полым грузом, взаимодействующим с талевым блоком, при этом расположенный на кронблоке магнитоуправляемый датчик с нормально разомкнутыми контактами соединяет положительный потенциал через катушки управления реле блокировки с отрицательным питающим потенциалом корпуса и через нормально замкнутый контакт выключателя и катушку реле удержания с ее контактом с отрицательным питающим потенциалом корпуса.(56) 1. А.с. СССР 1643699, МПК Е 21 В 15/00 // Бюл.15. - 1951. 2. Патент 3866, МПК Е 21 В 15/00, опубл. 30.10.2007. 3. Технические условия ТУ 400079509.047-2008. Агрегат подъемный АП-80. Опубл. 26.06.2008. Полезная модель относится к бурению, освоению и ремонту скважин, а именно к устройствам, снабженным телескопическими вышками. Известна телескопическая вышка 1, включающая наружную неподвижную секцию и размещенную в ней с зазором внутреннюю подвижную секцию с талевым блоком, механизмы их фиксации и талевую систему. Механизм фиксации содержит установленную в отверстии наружной секции подпружиненную защелку в виде пальца, который взаимодействует с толкателем, выполненным в виде треугольной пластины. Одна из ее вершин шарнирно закреплена на нижнем торце подвижной секции. Прилегающие к этой вершине- шарниру стороны толкателя выполнены с возможностью примыкания к указанному торцу. Наружная сторона толкателя выполнена с возможностью периодического размещения в зазоре между неподвижной и подвижной секциями. При установке вышки механизмом выдвижения подвижную секцию выдвигают из неподвижной секции. Палец торцовой поверхностью скользит по подвижной секции. Опоры на нижнем торце подвижной секции оказываются выше пальца, который перемещается пружиной в сторону подвижной секции. Это перемещение происходит до контакта торцовой поверхности пальца со стороной толкателя и после поворота толкателя до контакта его стороны с упором на торце подвижной секции. Затем подвижную секцию приспускают до контакта пальцев с опорами торца подвижной секции. Секции зафиксированы, и вышка готова к работе. Талевый блок совместно с талевой системой производят спуско-подъемные операции. Для складывания вышки подвижную секцию приподнимают. Торцовая поверхность пальца скользит по стороне толкателя. В этом случае палец оказывается ниже толкателя и перемещается в сторону подвижной секции, после чего она опускается. Палец контактирует со стороной толкателя, и по мере опускания подвижной секции сторона толкателя отжимает палец в сторону неподвижной секции, не препятствуя дальнейшему опусканию подвижной секции. Недостатком данной телескопической вышки является то, что в ее конструкции отсутствуют блокирующие элементы, обеспечивающие автоматическое отключение перемещения вверх талевого блока выше установленной определенной величины. Данный недостаток снижает эксплуатационные характеристики. Известна также телескопическая вышка 2, включающая неподвижную и расположенную в ней подвижную секции талевый блок и талевая система и два узла фиксации 2 54492009.08.30 подвижной секции в ее рабочем выдвинутом положении, талевый блок и талевая система. Каждый узел фиксации подвижной секции содержит корпуса, жестко связанные с верхними частями стоек, в которых на осях установлены жестко соединенные с ними упоры. В каждом корпусе выполнены также пазы, обеспечивающие поворот и установку упоров вдоль корпусов в их нерабочем положении для свободного прохождения подвижной секции, а также установку их в рабочем положении, обеспечивающем фиксацию подвижной секции в выдвинутом рабочем положении. В этом случае нижней своей частью упоры контактируют с опорной стенкой пазов корпусов. Упоры через их оси соответственно попарно соединены между собой через кривошипы и регулируемые тяги. Кривошипы имеют дополнительные плечи, соединенные системой управления упорами, выполненной в виде гибких тяг. Одни концы гибких тяг соединены с дополнительными плечами соответственно, а на противоположных концах установлены рукоятки. Стойки подвижной секции снабжены в нижних их частях трехступенчатыми пальцами, верхние ступени которых расположены внутри стоек, средние ступени контактируют с торцами стоек, а нижние ступени располагаются в отверстиях, выполненных в упорах. Телескопическая вышка работает следующим образом. В транспортном положении, т.е. при сложенной телескопической вышке, упоры располагаются в пазах корпусов. При выдвижении механизмом выдвижения подвижной секции из неподвижной секции узлы фиксации не препятствуют перемещению вверх подвижной секции, которую выдвигают до положения, когда ее нижний палец располагается выше корпусов. Затем рукоятку вручную опускают вниз, при этом через гибкую тягу устанавливают через дополнительное плечо кривошип и через регулируемую тягу кривошип и упоры в закрытое положение. В таком закрытом положении нижние грани упоров контактируют с опорными стенками пазов. Аналогично с противоположной стороны другой системой управления поворачивают кривошип и через регулируемую тягу кривошип в аналогичное закрытое положение, при этом упоры также поворачиваются в закрытое положение, т.е. их нижние грани контактируют с опорной стенкой пазов. Упоры находятся в закрытом положении, при этом механизмом выдвижения медленно опускают подвижную секцию до контакта торца средней ступени трехступенчатых пальцев, жестко связанных со стойками подвижной секции, с верхними опорными поверхностями упоров. Затем талевым блоком совместно с талевой системой производят спуско-подъемные операции. Для демонтажа устройства механизмом подъема подвижную секцию приподнимают в верхнее положение, после чего рукоятки перемещают вниз и через гибкие тяги поворачивают кривошипы в обратную сторону. Вместе с кривошипами и жестко связанными с ними посредством осей упорами последние поворачиваются на 90 и располагаются в пазах корпусов, не препятствуя опусканию подвижной секции до нижнего положения. После опускания подвижной секции до нижнего положения производят демонтаж агрегата. Недостатком данной телескопической вышки является то, что в конструкции отсутствуют автоматические электрические устройства, обеспечивающие автоматическую остановку талевого блока в определенном верхнем положении, что ухудшает ее эксплуатационные характеристики. Из известных устройств наиболее близким по технической сущности к предлагаемому техническому решению и достигаемому результату является телескопическая вышка 3,включающая неподвижную и расположенную в ней подвижную секции и два узла фиксации подвижной секции в ее рабочем выдвинутом положении, расположенные симметрично с двух сторон вышки. Каждый узел фиксации подвижной секции содержит корпуса,3 54492009.08.30 жестко связанные с верхними частями стоек, в которых на осях установлены жестко соединенные с ними упоры. В каждом корпусе выполнены также пазы, обеспечивающие поворот и установку упоров вдоль корпусов в их нерабочем положении для свободного прохождения подвижной секции, а также установку их в рабочем положении, обеспечивающем фиксацию подвижной секции в выдвинутом рабочем положении. В этом случае нижней своей частью упоры контактируют с опорной стенкой пазов корпусов. Упоры через их оси соответственно попарно соединены между собой через кривошипы и регулируемые тяги. Кривошипы имеют дополнительные плечи, соединенные системой управления упорами, выполненной в виде гибких тяг. Одни концы гибких тяг соединены с дополнительными плечами соответственно, а на противоположных концах установлены рукоятки. На верхней части неподвижной секции установлен кронблок с роликами, которые посредством талевой системы соединен с роликами кронблока, при этом один конец талевой системы закреплен неподвижно, а другой ее конец соединен с барабаном подъемной лебедки. Данная телескопическая вышка снабжена системой блокировки выдвижения подвижной секции, включающей реле блокировки с управляющей катушкой и нормально замкнутыми контактами. Вход реле блокировки электролинией соединен с положительным питающим потенциалом электросистемы, выход управляющей катушки реле блокировки электролинией связан со входом магнитоуправляемого датчика, а его выход - электролинией соединен с отрицательным потенциалом корпуса. Магнитоуправляемый датчик установлен на нижней части стойки неподвижной секции, а его постоянный магнит закреплен на подвижной секции выше оси поворотов упоров. Выход нормально замкнутых контактов реле блокировки электролинией соединен со входом нормально разомкнутого выключателя пульта управления. Выход же нормально разомкнутого выключателя электролинией соединен с системой выдвижения подвижной секции. Телескопическая вышка работает следующим образом. В транспортном положении, т.е. при сложенной телескопической вышке, упоры располагаются в пазах корпусов. При выдвижении механизмом выдвижения подвижной секции из неподвижной секции узлы фиксации не препятствуют перемещению вверх подвижной секции, которую выдвигают до положения, когда нижний край подвижной секции располагается выше корпусов. Затем рукоятку вручную опускают вниз, при этом через гибкую тягу устанавливают через дополнительное плечо кривошип, и через регулируемую тягу кривошип и упоры в закрытое положение. В таком закрытом положении нижние грани упоров контактируют с опорными стенками пазов. Аналогично с противоположной стороны другой системой управления поворачивают кривошип и через регулируемую тягу кривошип в аналогичное закрытое положение, при этом упоры также поворачиваются в закрытое положение, т.е. их нижние грани контактируют с опорной стенкой пазов. Упоры находятся в закрытом положении, при этом механизмом выдвижения медленно опускают подвижную секцию до контакта торца средней ступени трехступенчатых пальцев, жестко связанных со стойками подвижной секции, с верхними опорными поверхностями упоров. За счет осей обеспечивается жесткая связь упоров с кривошипами. При установке подвижной секции на упоры нижние ступени трехступенчатых пальцев заходят в отверстия,выполненные в упорах, обеспечивая при этом ее надежную фиксацию. Система блокировки работает следующим образом. При выдвижении подвижной секции из неподвижной секции на пульте управления вручную замыкают контакты нормально разомкнутого выключателя. При этом положительный питающий потенциал 4 54492009.08.30 направляет электрический ток по электролинии, нормально замкнутые контакты реле блокировки, электролинию, выключатель пульта управления и по электролинии к системе выдвижения подвижной секции телескопической вышки. Под действием электрического тока система выдвижения включается и перемещает вверх подвижную секцию. По мере ее выдвижения постоянный магнит подходит к магнитоуправляемому датчику, установленному на верхней части неподвижной секции выше оси поворотов упоров. При этом нормально разомкнутые контакты магнитоуправляемого датчика замкнутся и по электролиниям подключат отрицательный потенциал корпуса, который включит управляющую катушку реле блокировки. Под действием электромагнитных сил сердечник втягивается в управляющую катушку, тем самым размыкает контакты. При размыкании контактов магнитоуправляемого датчика электрическая цепь от положительного питающего потенциала к системе выдвижения прерывается и система выдвижения отключается, при этом подвижная секция останавливается. При включенном положении нормально разомкнутого выключателя система выдвижения отключена, и выдвижение подвижной секции остановлено. После установки подвижной секции на упоры при вращении барабана лебедки за счет наматывания на него подвижного конца талевой системы производят спуско-подъемные операции. Для демонтажа устройства механизмом подъема подвижную секцию приподнимают в верхнее положение, после чего рукоятки перемещают вниз и через гибкие тяги поворачивают кривошипы в обратную сторону. Вместе с кривошипами и жестко связанными с ними посредством осей упорами последние поворачиваются на 90 и располагаются в пазах корпусов, не препятствуя опусканию подвижной секции до нижнего положения. После опускания подвижной секции до нижнего положения производят демонтаж агрегата. Недостатком данной телескопической вышки является то, что в конструкции отсутствуют автоматические электрические устройства, обеспечивающие отключение подъем талевого блока в определенном верхнем положении, что ухудшает ее эксплуатационные характеристики. Техническая задача, на решение которой направлена заявляемая полезная модель, устранение вышеуказанных недостатков, а именно улучшение эксплуатационных характеристик телескопической вышки. Решение технической задачи достигается тем, что телескопическая вышка, включающая неподвижную секцию мачты и расположенную в ней подвижную секцию с узлом ее фиксации в выдвинутом верхнем положении, установленный на подвижной секции кронблок со шкивами и талевый канат с неподвижной и подвижной ветвями, соединяющими кронблок с талевым блоком, электросистему управления с положительным и отрицательным питающим потенциалами, пультом управления с реле блокировки отключения хода талевого блока, магнитоэлектрический датчик с нормально разомкнутым контактом и постоянным магнитом, снабжена автоматической системой ограничения подъема талевого блока с реле удержания, включающее управляющую катушку и нормально разомкнутые контакты, а постоянный магнит магнитоуправляемого датчика установлен на подпружиненной в сторону кронблока направляющей, кинематически связанной с расположенным на неподвижной ветви талевого каната полым грузом, взаимодействующим с талевым блоком, при этом расположенный на кронблоке магнито-управляемый датчик с нормально разомкнутым контактом соединяет положительный потенциал через катушки управления реле блокировки с отрицательным питающим потенциалом корпуса и через нормально замкнутый контакт выключателя и катушку реле удержания с ее контактом с отрицательным питающим потенциалом корпуса. Сущность полезной модели поясняется чертежами, на которых представлены фиг. 1 - общий вид изделия 5 54492009.08.30 фиг. 2 - сечение А-А по фиг. 1 фиг. 3 - вид по стрелке Б на фиг. 2 фиг. 4 - электросистема управления. Телескопическая вышка (см. фиг. 1, 2, 3 и 4) содержит неподвижную 1 и, расположенную в ней, подвижную 2 секции и два узла фиксации 3 и 4 подвижной секции 2 в ее рабочем выдвинутом положении. На верхней части подвижной секции 2 установлен кронблок 5 с его шкивами 6 и талевый канат 7 с подвижной 8 и неподвижной 9 ветвями и установленный на ветвях 8 и 9 талевый блок 10. В нижней части телескопической вышки расположен пульт управления 11 с автоматической системой 12 ограничения подъема талевого блока 10. Каждый узел фиксации 3 и 4 подвижной секции 2 содержит корпуса 13, 14, 15 и 16,жестко связанные с верхними частями стоек 17 и 18, в которых на осях 19, 20, 21 и 22 установлены жестко соединенные с ними упоры 23, 24, 25 и 26. В каждом корпусе 13, 14, 15 и 16 выполнены также пазы 27, обеспечивающие поворот и установку упоров 23, 24, 25 и 26 вдоль корпусов 13, 14, 15 и 16 в их нерабочем положении для свободного прохождения подвижной секции 2, а также установку их в рабочем положении, обеспечивающем фиксацию подвижной секции 2 в выдвинутом рабочем положении. В этом случае нижней своей частью упоры 23, 24, 25 и 26 (см. фиг. 2, 3) контактируют с опорной стенкой 28 пазов 27 корпусов 13, 14, 15 и 16. Упоры 23 и 24, 25 и 26 через их оси 19, 20, 21 и 22 соответственно попарно соединены между собой через кривошипы 29, 30, 31 и 32 и регулируемые тяги 33 и 34. Кривошипы 30 и 32 имеют дополнительные плечи 35 и 36, соединенные системой управления 37 упорами 23, 24, 25 и 26, выполненной в виде гибких тяг 38 и 39. Одни концы гибких тяг 38 и 39 соединены с дополнительными плечами 35 и 36 соответственно, а на противоположных концах установлены рукоятки 40 и 41. Стойки 42 и 43 подвижной секции 2 в ее нижнем рабочем положении контактируют с упорами 23, 24, 25 и 26, что обеспечивает ее удержание в рабочем положении. Автоматическая система 12 ограничения подъема талевого блока 10 (см. фиг. 1,фиг. 4) включает в себя установленные на кронблоке 5 направляющую 44, пружину 45,полый груз 46, установленный на неподвижной ветви 9 талевого каната 7 и кинематически связанный с направляющей 44. На направляющей 44 закреплен постоянный магнит 47 магнитоуправляемого датчика 48 с его нормально разомкнутым контактом 49. Автоматическая система 12 ограничения подъема талевого блока 10 включает в себя также реле удержания 50 с его катушкой управления 51 и нормально разомкнутым контактом 52. В ее конструкцию также входит выключатель 53 с его нормально замкнутым контактом 54. В электрическую систему включены также реле блокировки 55 с катушкой управления 56 и ее нормально разомкнутым контактом 57, отрицательные питающие потенциалы 58 и 59, а также положительный питающий потенциал 60. Электрическими линиями 61, 62, 63, 64, 65, 66, 67, 68, 69 соединены между собой элементы автоматической системы 12 соответственно, а электрической линией 70 с исполнительным механизмом 71 системы торможения лебедки (на фиг. не показана). Телескопическая вышка работает следующим образом. В транспортном положении, т.е. при сложенной телескопической вышке, упоры 23,24, 25 и 26 располагаются в пазах 27 корпусов 13, 14, 15 и 16. При выдвижении механизмом выдвижения (на фиг. не показан) подвижной секции 2 из неподвижной секции 1 узлы фиксации 3 и 4 не препятствуют перемещению вверх подвижной секции 2, которую выдвигают до положения, когда нижние концы стоек 42 и 43 расположатся выше корпусов 13, 14, 15 и 16. Затем рукоятку 40 вручную опускают вниз, при этом через гибкую тягу 38 дополнительное плечо 35 кривошипа 30, через регулируемую тягу 34 кривошип 29, оси 21 и 22 ус 6 54492009.08.30 танавливают упоры 25 и 26 в закрытое положение. В таком закрытом положении нижние грани упоров 25, 26 контактируют с опорными стенками 28 пазов 27. Аналогично с противоположной стороны другой системой управления поворачивают кривошип 30 и через регулируемую тягу 33 кривошип 29 в аналогичное закрытое положение, при этом упоры 23 и 24 также поворачиваются в закрытое положение, т.е. их нижние грани контактируют с опорной стенкой 28 пазов 27. Упоры 23, 24, 25 и 26 находятся в закрытом положении, при этом механизмом выдвижения (на фиг. не показан) медленно опускают подвижную секцию 2 до контакта торцов опорных стоек 42 и 43 подвижной секции 2 с верхними опорными поверхностями упоров 23, 24, 25 и 26. За счет осей 19, 20, 21 и 22 обеспечивается жесткая связь упоров 23, 24, 25 и 26 с кривошипами 29, 30, 31 и 32. После установки и фиксации подвижной секции 2 в рабочем положении производят подъем талевого блока 10 посредством талевого каната 7. Неподвижная ветвь 9 талевого каната 7 закреплена на кронблоке 5, а подвижная ось 8 проходит через ролики талевого блока 10, поднимается вверх и, пройдя шкивы 6 кронблока 5, опускается вниз и наматывается на барабан лебедки (на фиг. не показана). За счет вращения барабана лебедки и наматывания на него подвижной ветви 8 талевого каната 7 талевый блок 10 поднимается вверх, а вместе с ним извлекаются трубы из скважины. При подъеме талевого блока 10 в крайнее верхнее положение талевый блок 10 поднимает установленный на неподвижной ветви 9 талевого каната 7 полый груз 46, при этом за счет кинематической связи направляющая 44 под действием силы сжатия пружины 45 поднимается вверх вместе с постоянным магнитом 47. Постоянный магнит 47 поднимается к контакту 49 и за счет действия магнитных сил его замыкает. При замыкании контакта 49 отрицательный питающий потенциал 58 по электролинии 61, закрытый контакт 49, электролинию 62 поступает на катушку управления 56 реле блокировки 55 и к положительному питающему потенциалу 60. При этом катушка управления 56 срабатывает, замыкает контакт 57, при этом соединяется по электролиниям 69 и 70 электрическая цепь и подается команда на исполнительный механизм 71 системы торможения лебедки, и включения тормозной системы (на фиг. не показаны). Движение талевого блока 10 прекращается. При большой скорости перемещения талевого блока 10 возможны случаи быстрого срабатывания магнитоуправляемого датчика 48 с последующим его отключением (проскакивания талевого блока 10), при этом в конструкцию введено реле удержания 50 талевого блока 10. При замыкании контакта магнитоуправляемого датчика 48 электрический сигнал параллельно поступает по электролинии 65, нормально замкнутый контакт 54 выключателя 53, электролинию 66 на катушку управления 51 и далее по электролинии 67 к положительному питающему потенциалу 60. За счет действия электрического тока катушка управления 51 срабатывает и замыкает контакт 52 реле удержания 50. При замыкании контакта 52 электрический сигнал от отрицательного питающего потенциала 59 по электролинии 64, замкнутый контакт 52, электролинии 63, катушку управления 56, электролинию 68 поступает к положительному питающему потенциалу 60. Катушка управления 56 срабатывает и замыкает контакт 57. При замыкании контакта 57 электрический сигнал по электролиниям 68 и 69, замкнутый контакт 57 и электролинию 70 поступает на исполнительный механизм 71 системы торможения лебедки, отключения привода лебедки и включения тормозной системы (на фиг. не показаны). Талевый блок в этом случае остается без перемещения на месте. Таким образом, независимо от дальнейшего положения постоянного магнита 47 системы ограничения подъема талевого блока 10 контакты магнитоуправляемого датчика 49 заблокированы замкнутыми контактами 52 реле удержания 50, что обеспечивает полную остановку привода хода талевого блока 10. 7 54492009.08.30 Для последующего включения хода талевого блока 10 необходимо вручную разъединить контакты 54 включателя 53, тем самым обесточить катушку управления 56 реле блокировки 55 по электрическим цепям 63 и 64. В данной телескопической вышке независимо от дальнейшего положения постоянного магнита 47 автоматической системы 12 ограничения подъема талевого блока 10 контакты 49 магнитоуправляемого датчика 48 будут заблокированы замкнутым контактом 52 реле удержания 50, что исключает перемещение талевого блока 10. Для разблокирования системы аварийной остановки привода хода талевого блока 10 бурильщик должен вручную разорвать цепь питания 65 управляющей катушки 51 реле удержания 50 посредством разрыва нормально замкнутых контактов 54 выключателя 53. Управляющая катушка 51 реле удержания 50 и управляющая катушка 56 реле блокировки 55 обесточатся. Положительный потенциал системы питания 60 через нормально разомкнутый контакт 57 реле блокировки 55 отключится от системы аварийной остановки привода хода талевого блока 10. Талевый блок 10 опускается на безопасную высоту и продолжается плановая работа на скважине. Таким образом, в телескопической вышке, включающей неподвижную секцию 1 и расположенную в ней подвижную секцию 2 с узлами 3 и 4 ее фиксации в выдвинутом верхнем положении, установленный на подвижной секции кронблок 5 со шкивами 6 и талевый канат 7 с неподвижной 8 и подвижной 9 ветвями, соединяющими кронблок 5 с талевым блоком 10, электросистему управления с положительным 60 и отрицательными питающими потенциалами 58 и 59, пультом управления 11 с реле блокировки 55 отключения хода талевого блока 10, магнитоэлектрический датчик 48 с нормально разомкнутым контактом 49 и постоянным магнитом 47, снабженной автоматической системой 12 ограничения подъема талевого блока 10 с реле удержания 50, включающее управляющую катушку 51 и нормально разомкнутый контакт 52, а постоянный магнит 47 магнитоуправляемого датчика 48 установлен на подпружиненной 45 в сторону кронблока 5 направляющей 44, кинематически связанной с расположенным на неподвижной ветви 9 талевого каната 7 полым грузом 46, взаимодействующим с талевым блоком 10, при этом расположенный на кронблоке 5 магнитоуправляемый датчик 48 с нормально разомкнутым контактом 49 соединяет положительный потенциал 60 через катушку управления 56 реле блокировки 55 с отрицательным питающим потенциалом корпуса 58 и через нормально замкнутый контакт 54 выключателя и катушку 51 реле удержания 50 с ее контактом 52 с отрицательным питающим потенциалом 59 исключается возможность поднятия талевого блока 10 на настроенную автоматической системой 12 высоту, улучшаются эксплуатационные характеристики, что в конечном итоге обеспечивает решение технической задачи. На дату подачи заявки разработана рабочая конструкторская документация на телескопическую вышку и изготовлен опытный образец агрегата, испытания которого запланированы наквартал 2009 г. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 9
МПК / Метки
МПК: E21B 15/00
Метки: телескопическая, вышка
Код ссылки
<a href="https://by.patents.su/9-u5449-teleskopicheskaya-vyshka.html" rel="bookmark" title="База патентов Беларуси">Телескопическая вышка</a>
Телескопическая вышка
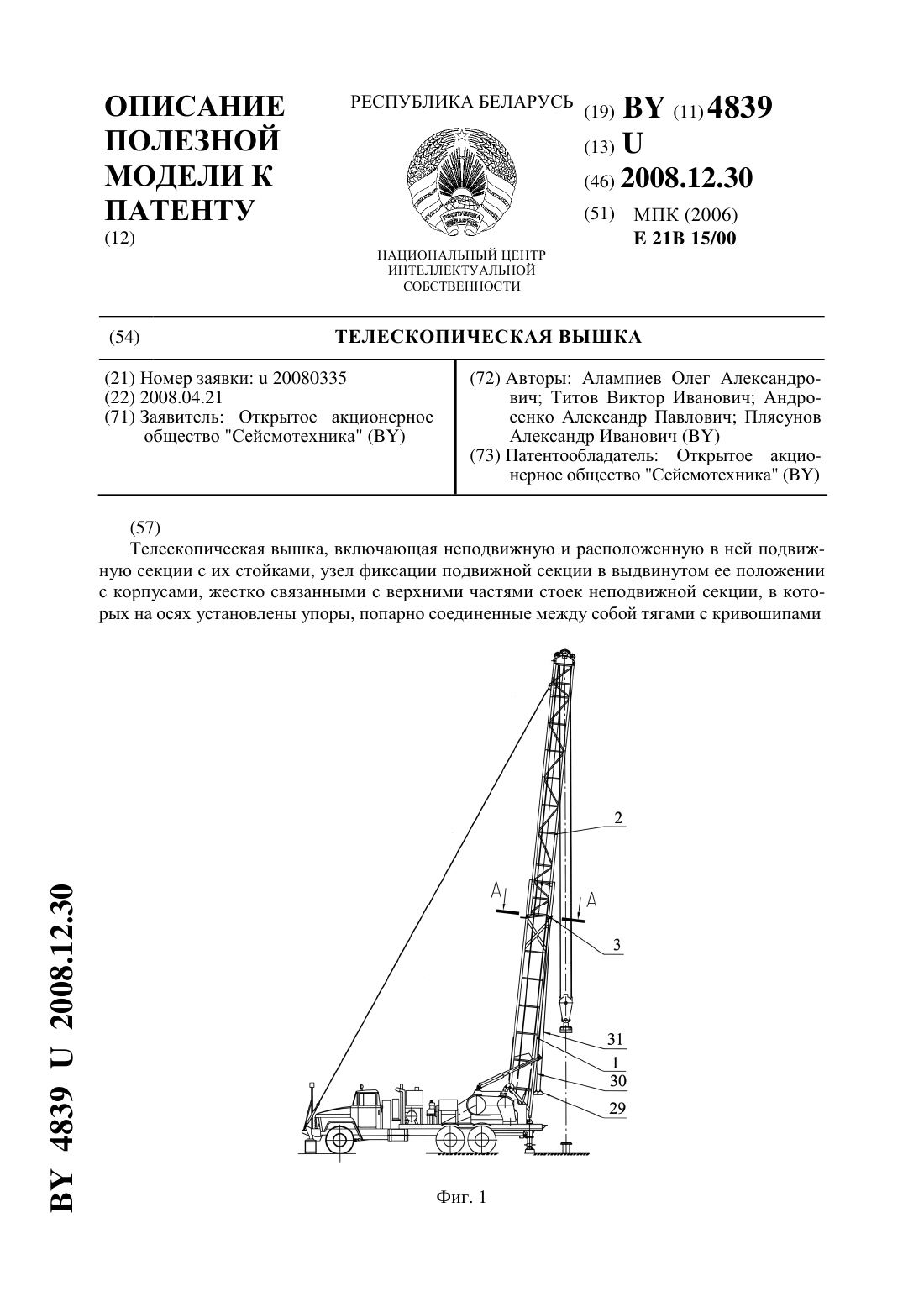
Номер патента: U 4839
Опубликовано: 30.12.2008
Авторы: Титов Виктор Иванович, Плясунов Александр Иванович, Алампиев Олег Александрович, Андросенко Александр Павлович
МПК: E21B 15/00
Метки: вышка, телескопическая
Текст:
...с управляющей катушкой и нормально замкнутыми контактами, пульт управления с нормально разомкнутыми контактами выключателя и магнитоуправляемый датчик с постоянным магнитом, расположенным на нижней части стойки подвижной секции, а магнитоуправляемый датчик установлен на неподвижной секции мачты выше оси поворота упоров, при этом вход реле блокировки связан с положительным питающим потенциалом электросистемы, выход реле блокировки...
Телескопическая вышка
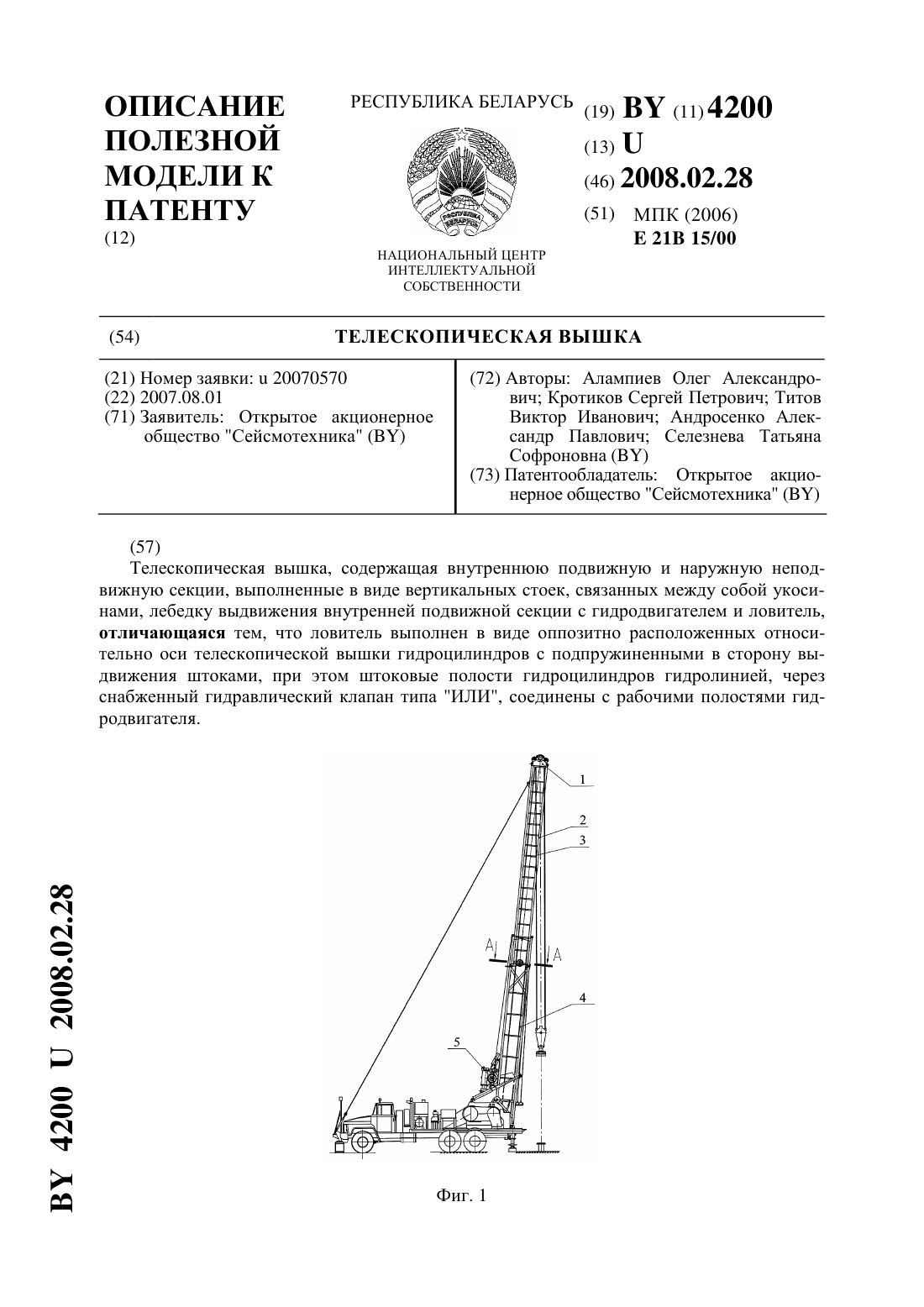
Номер патента: U 4200
Опубликовано: 28.02.2008
Авторы: Андросенко Александр Павлович, Кротиков Сергей Петрович, Титов Виктор Иванович, Селезнева Татьяна Софроновна, Алампиев Олег Александрович
МПК: E21B 15/00
Метки: вышка, телескопическая
Текст:
...относительно неподвижной и соответственно к деформации секций. Техническая задача, на решение которой направлена заявляемая полезная модель устранение вышеуказанных недостатков, а именно повышение надежности телескопической вышки. Решение технической задачи достигается тем, что в телескопической вышке, содержащей внутреннюю подвижную и наружную неподвижную секции, выполненных в виде вертикальных стоек, связанных между собой укосинами,...
Телескопическая вышка
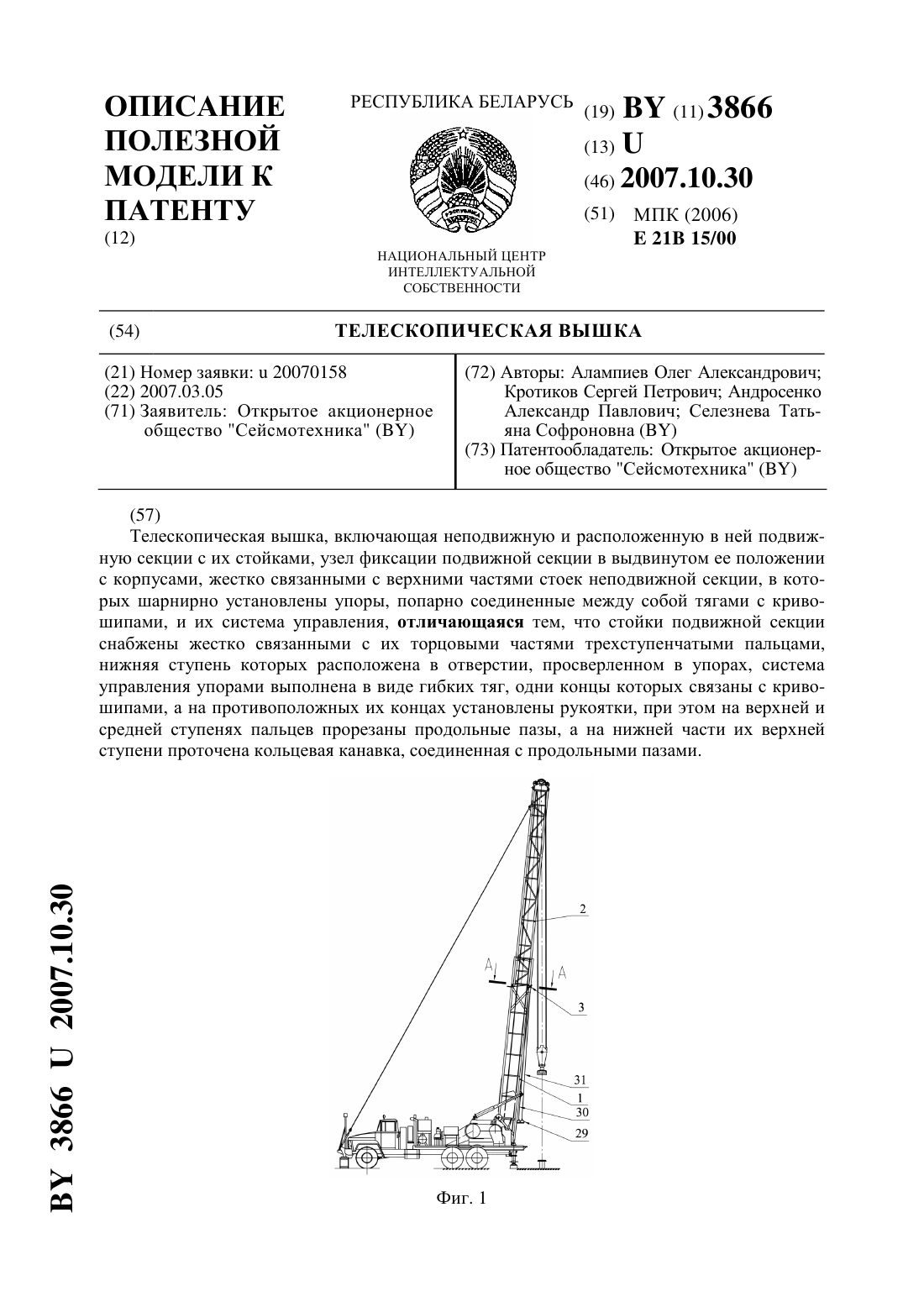
Номер патента: U 3866
Опубликовано: 30.10.2007
Авторы: Андросенко Александр Павлович, Селезнева Татьяна Софроновна, Кротиков Сергей Петрович, Алампиев Олег Александрович
МПК: E21B 15/00
Метки: вышка, телескопическая
Текст:
...упоры. Этот процесс настройки рабочей поверхности копира относительно ролика коромысла является достаточно сложной операцией регулирования, что снижает надежность работы узла фиксации. 3 38662007.10.30 Другим недостатком данной конструкции является также то, что в данной конструкции отсутствуют устройства, позволяющие обеспечить удаление конденсата из нижних частей трубчатых стоек подвижной секции вышки. Наличие конденсата в нижних частях...
Передвижная вышка
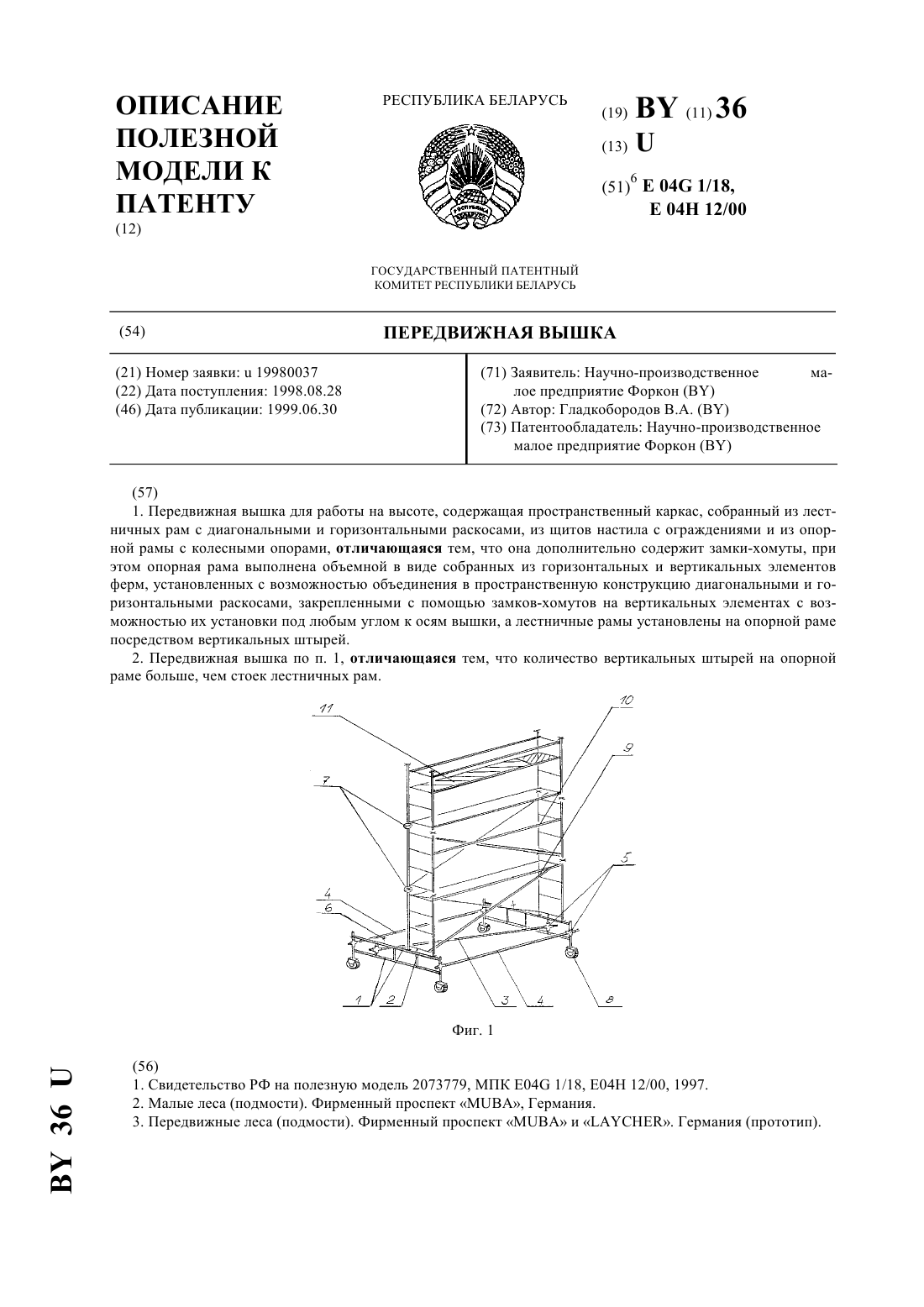
Номер патента: U 36
Опубликовано: 30.06.1999
Автор: Гладкобородов Вячеслав Александрович
МПК: E04H 12/00, E04G 1/18
Метки: передвижная, вышка
Текст:
...чертежами, где изображены фиг. 1 - передвижная вышка, общий вид фиг. 2 - пространственная нижняя опорная рама передвижной вышки фиг. 3 - плоская опорная рама передвижной вышки. Передвижная вышка для работы на высоте содержит опорную раму в виде фермы, содержащей горизонтальные 1 и вертикальные 2 элементы. Опорная рама объединена в пространственную конструкцию диагональными 3 и горизонтальными 4 раскосами, закрепляемыми с помощью...
Буровая вышка

Номер патента: U 4875
Опубликовано: 30.12.2008
Авторы: Андросенко Александр Павлович, Козусева Тамара Ивановна, Шейбут Геннадий Евгеньевич, Новикова Светлана Казимировна, Алампиев Олег Александрович
МПК: E21B 15/00
Текст:
...в виде рамок с обшивкой и снабжены крюками, взаимодействующими с перекладинами, и в нижней части металлические щиты связаны между собой болтовым соединением. 2 48752008.12.30 Сущность полезной модели поясняется чертежами, на которых представлены фиг. 1 общий вид буровой вышки фиг. 2 - общий вид укрытия в собранном состоянии в аксонометрии фиг. 3 - выноска- установка стаканов и вертикальных стоек укрытия фиг. 4 - выноска- соединение...
Предыдущий патент: Предохранитель валика подвески тормозного башмака тележки вагона
Следующий патент: Письменно-компьютерный стол
Случайный патент: Способ получения 4-деметокси-7-деокси-дауномицинона или 4-деметоксидауномицинона