Следящая система автоматического управления с компенсацией неизмеряемых экспоненциально-коррелированных возмущений
Номер патента: U 1170
Опубликовано: 30.12.2003
Авторы: Мацкевич Артур Николаевич, Розсудовский Сергей Викторович, Цеховой Аркадий Евгеньевич

Текст
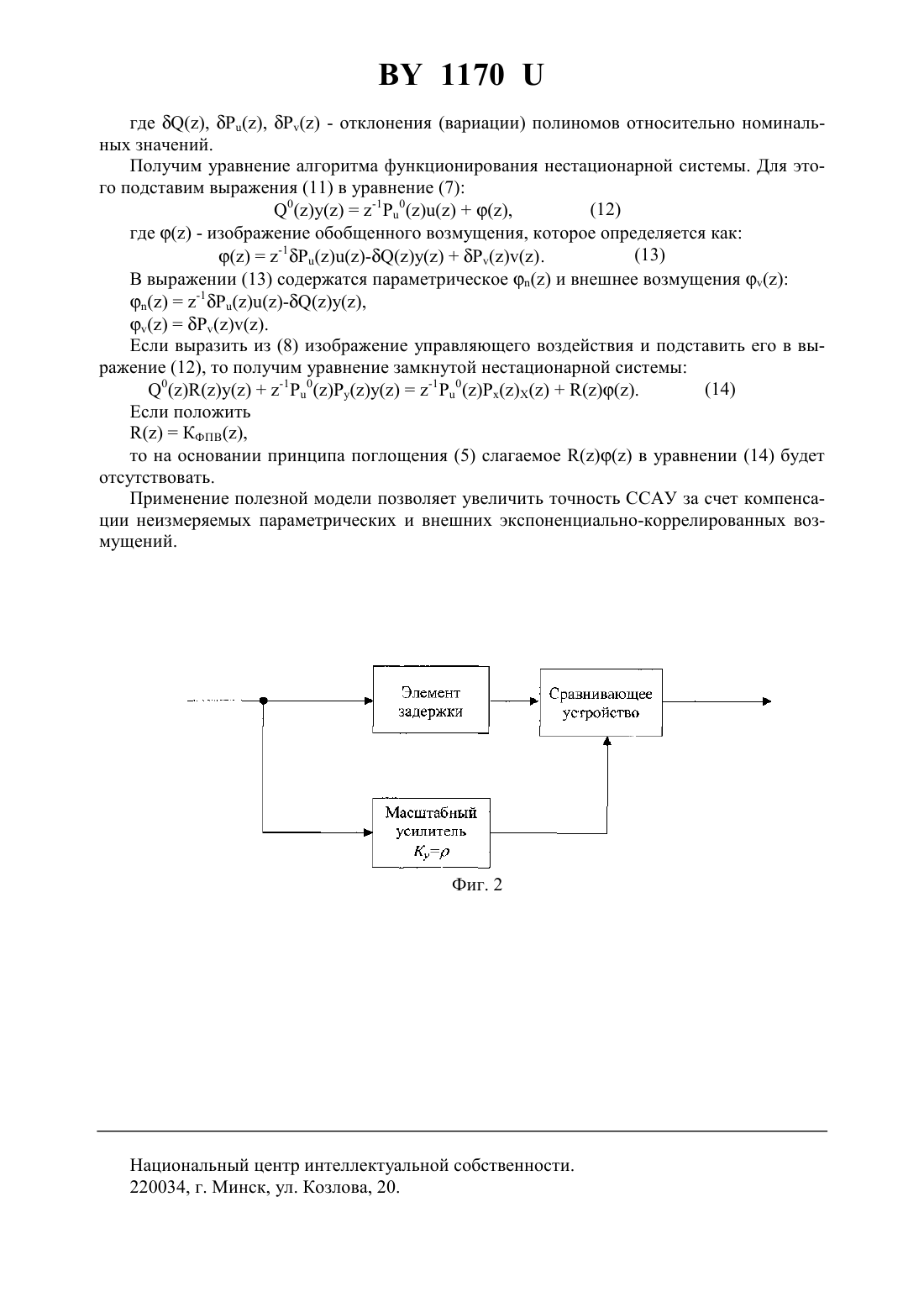
НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СЛЕДЯЩАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ С КОМПЕНСАЦИЕЙ НЕИЗМЕРЯЕМЫХ ЭКСПОНЕНЦИАЛЬНОКОРРЕЛИРОВАННЫХ ВОЗМУЩЕНИЙ(71) Заявитель Военная академия Республики Беларусь(72) Авторы Мацкевич Артур Николаевич Розсудовский Сергей Викторович Цеховой Аркадий Евгеньевич(73) Патентообладатель Военная академия Республики Беларусь(57) Следящая система автоматического управления с компенсацией неизмеряемых экспоненциально-коррелированных возмущений, содержащая последовательно соединенные задающее устройство, первое сравнивающее устройство, усилитель, второе сравнивающее устройство, усилитель мощности, двигатель, рабочий орган, а также параллельное корректирующее устройство и датчик обратной связи, при этом выход двигателя подключен через параллельное корректирующее устройство к второму входу второго сравнивающего устройства и через датчик обратной связи - к второму входу первого сравнивающего устройства, отличающаяся тем, что в систему введен фильтр поглощения возмущения, вход которого последовательно подключен к выходу первого сравнивающего устройства, а выход - к входу усилителя. 1170 Полезная модель относится к системам автоматического управления и может быть использована при управлении рабочими органами станков, летательных аппаратов и антенных постов. Известна следящая система автоматического управления (ССАУ) рабочим органом(исполнительным элементом) станка 1. Система содержит задающее устройство, первое сравнивающее устройство, усилитель, параллельное корректирующее устройство, датчик обратной связи, а также последовательно соединенные второе сравнивающее устройство,последовательное корректирующее устройство, усилитель мощности, двигатель и рабочий орган, при этом выход задающего устройства подключен к первому входу первого сравнивающего устройства, выход усилителя соединен с первым входом второго сравнивающего устройства, а выход двигателя подключен через параллельное корректирующее устройство к второму входу второго сравнивающего устройства и через датчик обратной связи - ко второму входу первого сравнивающего устройства. Недостатком этой системы является невозможность добиться высокой точности стабилизации рабочего органа станка относительно программной траектории вследствие того, что увеличение точности стабилизации приводит к увеличению коэффициента усиления прямой цепи следящей системы, что уменьшает запасы устойчивости системы, и к увеличению требований к быстродействию двигателя. Наиболее близкой по совокупности существенных признаков к заявляемой модели является ССАУ с компенсацией неизмеряемых возмущений 2, предназначенная для увеличения точности ССАУ за счет компенсации неизмеряемых внешних и параметрических возмущений, содержащая задающее устройство, первое сравнивающее устройство, сумматор, усилитель, параллельное корректирующее устройство, блок идентификации и формирования сигналов для компенсации возмущений, датчик обратной связи, а также последовательно соединенные второе сравнивающее устройство, последовательное корректирующее устройство,усилитель мощности, двигатель и рабочий орган, при этом выход задающего устройства подключен к первому входу первого сравнивающего устройства, первый вход сумматора подсоединен к выходу первого сравнивающего устройства, выход сумматора связан с усилителем, выход усилителя соединен с первым входом второго сравнивающего устройства,а выход двигателя подключен через параллельное корректирующее устройство к второму входу второго сравнивающего устройства и через датчик обратной связи - к второму входу первого сравнивающего устройства на входы блока идентификации и формирования сигналов для компенсации возмущений поступают сигналы с первого сумматора, усилителя, второго сравнивающего устройства, последовательного корректирующего устройства, усилителя мощности, датчика обратной связи, а выход подключен ко второму входу сумматора. Недостатком этой системы-прототипа является наличие информационно-избыточных каналов косвенного измерения параметрических и внешних возмущений при идентификации и формировании сигналов для их компенсации, сложность самого блока идентификации и формирования сигналов компенсации возмущений, что усложняет структуру ССАУ,снижает ее надежность, помехозащищенность и приводит к снижению качества идентификации, а следовательно, и к снижению качества компенсации внешних и внутренних параметрических возмущений. Анализ условий функционирования следящих систем при нестационарных возмущениях показывает, что на конкретную систему может воздействовать одно или несколько нестационарных возмущений, законы изменения во времени которых можно предсказать. В этом случае, в конкретной системе, на основании априорной информации из опыта эксплуатации возможна компенсация возмущений без введения в структуру ССАУ дополнительных измерительных устройств. Задачей настоящей полезной модели является увеличение точности ССАУ за счет компенсации неизмеряемых экспоненциально-коррелированных внешних и параметрических возмущений без введения в систему дополнительных измерительных устройств. 2 1170 Техническим результатом осуществления полезной модели является увеличение точности ССАУ за счет компенсации неизмеряемых параметрических и внешних экспоненциально-коррелированных возмущений. Для решения поставленной задачи полезная модель содержит последовательно соединенные задающее устройство, первое сравнивающее устройство, усилитель, второе сравнивающее устройство, усилитель мощности, двигатель, рабочий орган, а также параллельное корректирующее устройство и датчик обратной связи, при этом выход двигателя подключен через параллельное корректирующее устройство к второму входу второго сравнивающего устройства и через датчик обратной связи к второму входу первого сравнивающего устройства, и отличается от прототипа тем, из устройства-прототипа исключаются сумматор, последовательное корректирующее устройство и блок идентификации и формирования сигналов для компенсации возмущения и вводится дополнительно фильтр поглощения возмущения, вход которого последовательно подключен к выходу первого сравнивающего устройства, а выход - к входу усилителя. На фиг. 1 представлена функциональная схема ССАУ с компенсацией неизмеряемых экспоненциально-коррелированных возмущений, а на фиг. 2 - структурная схема фильтра поглощения возмущения. ССАУ содержит задающее устройство 1, первое сравнивающее устройство 2, фильтр поглощения возмущения 3, усилитель 4, второе сравнивающее устройство 5, усилитель мощности 6, двигатель 7, рабочий орган 8, параллельное корректирующее устройство 9,датчик обратной связи 10. ССАУ работает следующим образом. Под воздействием внешних и параметрических экспоненциально-коррелированных возмущений рабочий орган 8 отклоняется от траектории, задаваемой задающим устройством 1, выход которого соединен с первым входом первого сравнивающего устройства 2. Датчик 10 обратной связи измеряет действительное положение рабочего органа 8. Эта информация подается на второй вход первого сравнивающего устройства 2. Первое сравнивающее устройство 2 вырабатывает сигнал стабилизирующего управления , представляющий собой разность сигналов, поступающих на его два входа, и содержащий при этом в себе, за счет обратной связи, обобщенное возмущение, воздействовавшее на ССАУ. Вид этого сигнала зависит от характеристик устройств следящей системы усилителя 4, усилителя мощности 6, двигателя 7, датчика обратной связи 10, параллельного корректирующего устройства 9 и влияет на качество переходных процессов в системе. Характеристики устройств ССАУ выбираются на этапе ее синтеза исходя из основных требований к ней запасов устойчивости, точности, быстродействия. Передаточная функция параллельного корректирующего устройства имеет вид(11 ) 2(11 )к,(1) 1 к (11 ) где Кс - коэффициент преобразования стабилизирующей обратной связи Кк - коэффициент преобразования корректирующей обратной связи к - постоянная времени дискретного апериодического звена. Сигналс выхода первого сравнивающего устройства 2 подается на вход фильтра поглощения возмущения 3. Фильтр поглощения возмущения 3 вырабатывает сигнал , который обеспечивает требуемое качество переходных процессов в ССАУ и компенсацию неизмеряемых внешних и параметрических экспоненциально-коррелированных возмущенийКФПВ,(2) где КФПВ - передаточная функция фильтра поглощения возмущения. Сигнал управленияс выхода фильтра поглощения возмущения 3 подается на вход усилителя 4, где усиливается и подается на первый вход второго сравнивающего устройства 5. На второй вход второго сравнивающего устройства 5 подается сигнал с выхода параллельного корректирующего устройства 9, преобразующего сигнал о действительном 3 1170 положении рабочего органа 8. Второе сравнивающее устройство 5 вырабатывает сигнал,который представляет собой разность сигналов, поступающих на его два входа. Сигнал с выхода второго сравнивающего устройства 5 подается на вход усилителя мощности 6 и усиливается там по мощности. С выхода усилителя мощности 6 сигнал подается на двигатель 7, который изменяет положение рабочего органа 8 таким образом, чтобы уменьшить рассогласование между требуемым и действительным положением рабочего органа 8,причем этот процесс должен идти с требуемым качеством. Случайный, экспоненциально-коррелированный процесс описывается корреляционной функциейП где- время корреляции процесса. Передаточная функция фильтра поглощения возмущения (полином поглощения) определяется исходя из условия(5) КФПВ 0,где- обобщенное возмущение. Передаточная функция фильтра поглощения обобщенного экспоненциальнокоррелированного возмущения равна(6) ФПВ-1-,гдеП . Покажем возможность реализации алгоритма работы ССАУ с компенсацией неизмеряемых экспоненциально-коррелированных возмущений. Разностное уравнение алгоритма функционирования системы представляется в виде, ,- известные полиномы системы. Уравнение управляющего устройства в общем виде запишем следующим образом, ,- полиномы управляющего устройства. Получим в общем виде уравнение замкнутой цифровой системы. Для этого выразим изображение управляющего воздействия из выражения (8) и подставим его в уравнение алгоритма функционирования (7)(9) Разностное уравнение алгоритма функционирования системы в номинальном режиме и при отсутствии возмущений имеет вид 0-10,(10) 0 0 гдеи- номинальные полиномы, а полином 0. За счет изменения параметров системы и характеристик внешних возмущений представим полиномы уравнения алгоритма функционирования в виде 1170 где , ,- отклонения (вариации) полиномов относительно номинальных значений. Получим уравнение алгоритма функционирования нестационарной системы. Для этого подставим выражения (11) в уравнение (7)-1-,. Если выразить из (8) изображение управляющего воздействия и подставить его в выражение (12), то получим уравнение замкнутой нестационарной системы КФПВ,то на основании принципа поглощения (5) слагаемоев уравнении (14) будет отсутствовать. Применение полезной модели позволяет увеличить точность ССАУ за счет компенсации неизмеряемых параметрических и внешних экспоненциально-коррелированных возмущений. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
МПК: G05B 11/01
Метки: следящая, возмущений, управления, автоматического, система, неизмеряемых, компенсацией, экспоненциально-коррелированных
Код ссылки
<a href="https://by.patents.su/5-u1170-sledyashhaya-sistema-avtomaticheskogo-upravleniya-s-kompensaciejj-neizmeryaemyh-eksponencialno-korrelirovannyh-vozmushhenijj.html" rel="bookmark" title="База патентов Беларуси">Следящая система автоматического управления с компенсацией неизмеряемых экспоненциально-коррелированных возмущений</a>
Следящая система автоматического управления с компенсацией неизмеряемых возмущений, коррелированных по экспоненциально-колебательному закону

Номер патента: U 1169
Опубликовано: 30.12.2003
Авторы: Гончарук Игорь Анатольевич, Розсудовский Сергей Викторович, Мацкевич Артур Николаевич
МПК: G05B 11/01
Метки: управления, коррелированных, закону, компенсацией, автоматического, система, возмущений, экспоненциально-колебательному, следящая, неизмеряемых
Текст:
...через параллельное корректирующее устройство к второму входу второго сравнивающего устройства и через датчик обратной связи - квторому входу первого сравнивающего устройства, и отличается от прототипа тем, из устройства-прототипа исключаются сумматор, последовательное корректирующее устройство и блок идентификации и формирования сигналов для компенсации возмущения, и вводится дополнительно фильтр поглощения возмущения,вход которого...
Следящая система автоматического управления с компенсацией неизмеряемых скачкообразных возмущений
Номер патента: U 1002
Опубликовано: 30.09.2003
Авторы: Мацкевич Артур Николаевич, Ганэ Вадим Арведович
МПК: G05B 11/01
Метки: управления, неизмеряемых, система, возмущений, автоматического, следящая, компенсацией, скачкообразных
Текст:
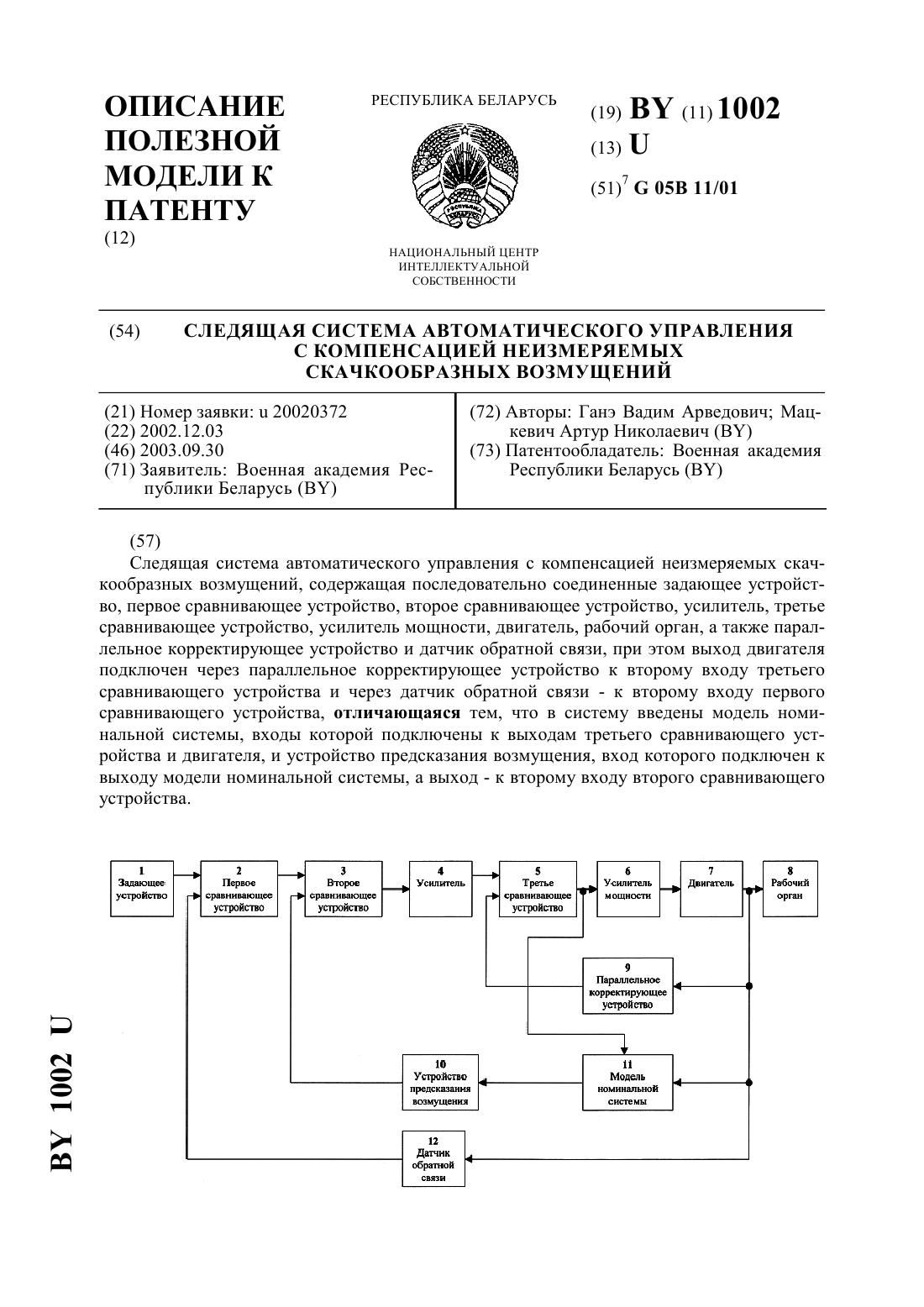
...второму входу первого сравнивающего устройства, и отличается от прототипа тем, что в систему введены модель номинальной системы, входы которой подключены к выходам третьего сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу второго сравнивающего устройства. На фигуре представлена функциональная схема ССАУ с компенсацией неизмеряемых...
Следящая система автоматического управления с компенсацией неизмеряемых возмущений, изменяющихся по квадратичному закону

Номер патента: U 1000
Опубликовано: 30.09.2003
Авторы: Санько Андрей Анатольевич, Мацкевич Артур Николаевич
МПК: G05B 11/01
Метки: возмущений, компенсацией, закону, управления, следящая, изменяющихся, неизмеряемых, квадратичному, автоматического, система
Текст:
...сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу второго сравнивающего устройства. На фиг. 1 представлена функциональная схема ССАУ с компенсацией неизмеряемых возмущений, изменяющихся по квадратичному закону, а на фиг. 2 - структурная схема устройства предсказания возмущения. ССАУ содержит задающее устройство 1, первое...
Следящая система автоматического управления с компенсацией неизмеряемых линейно изменяющихся во времени возмущений
Номер патента: U 1001
Опубликовано: 30.09.2003
Авторы: Сончик Дмитрий Михайлович, Мацкевич Артур Николаевич
МПК: G05B 11/01
Метки: управления, линейно, неизмеряемых, компенсацией, система, изменяющихся, автоматического, времени, следящая, возмущений
Текст:
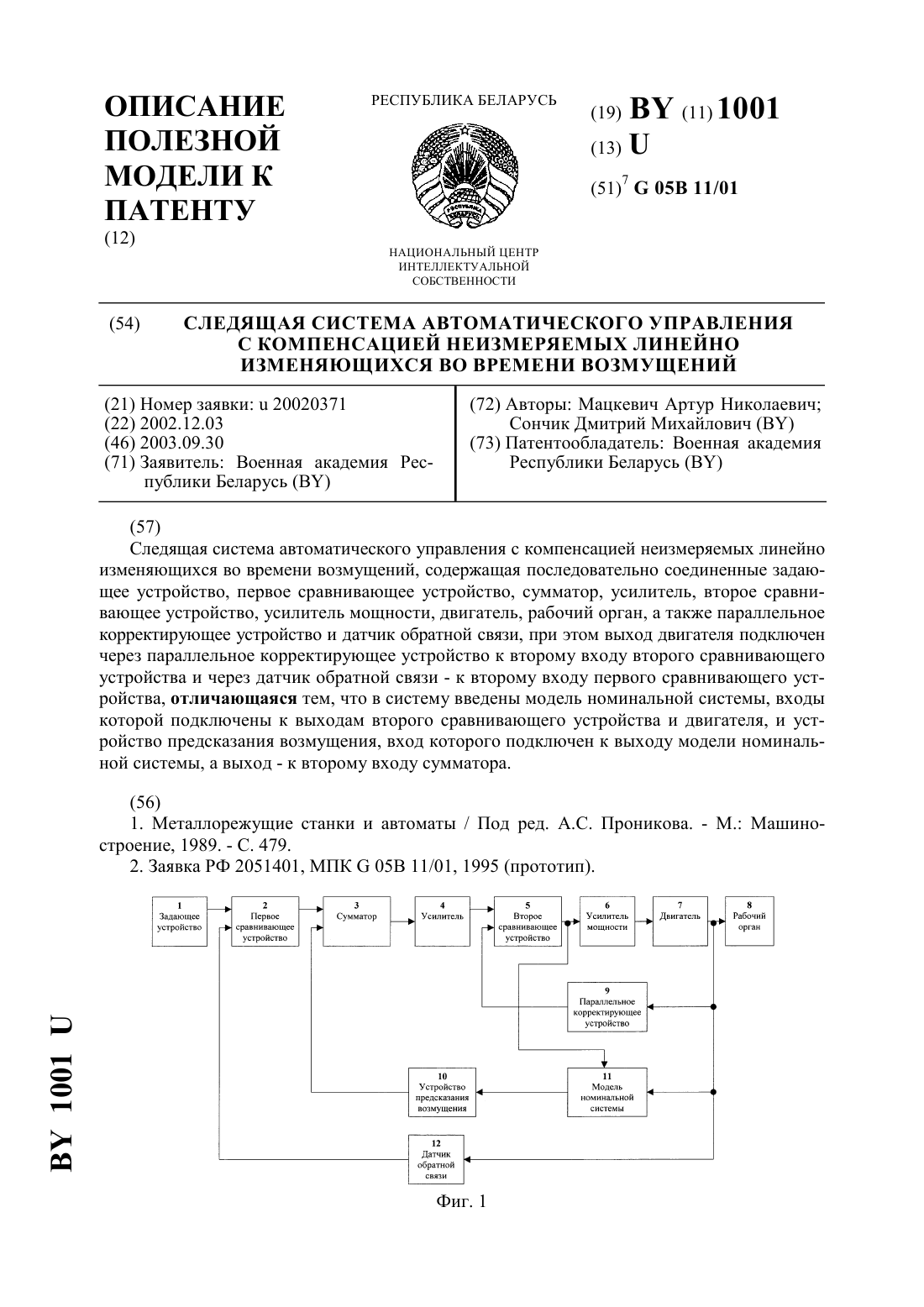
...введены модель номинальной системы, входы которой подключены к выходам второго сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу сумматора. На фиг. 1 представлена функциональная схема ССАУ с компенсацией неизмеряемых линейно изменяющихся во времени возмущений, а на фиг. 2 - структурная схема устройства предсказания возмущения....
Следящая система автоматического управления с компенсацией неизмеряемых возмущений, изменяющихся по экспоненциальному закону
Номер патента: U 1004
Опубликовано: 30.09.2003
Авторы: Мацкевич Артур Николаевич, Сончик Дмитрий Михайлович, Ганэ Вадим Арведович
МПК: G05B 11/01
Метки: экспоненциальному, следящая, система, компенсацией, изменяющихся, закону, возмущений, управления, неизмеряемых, автоматического
Текст:
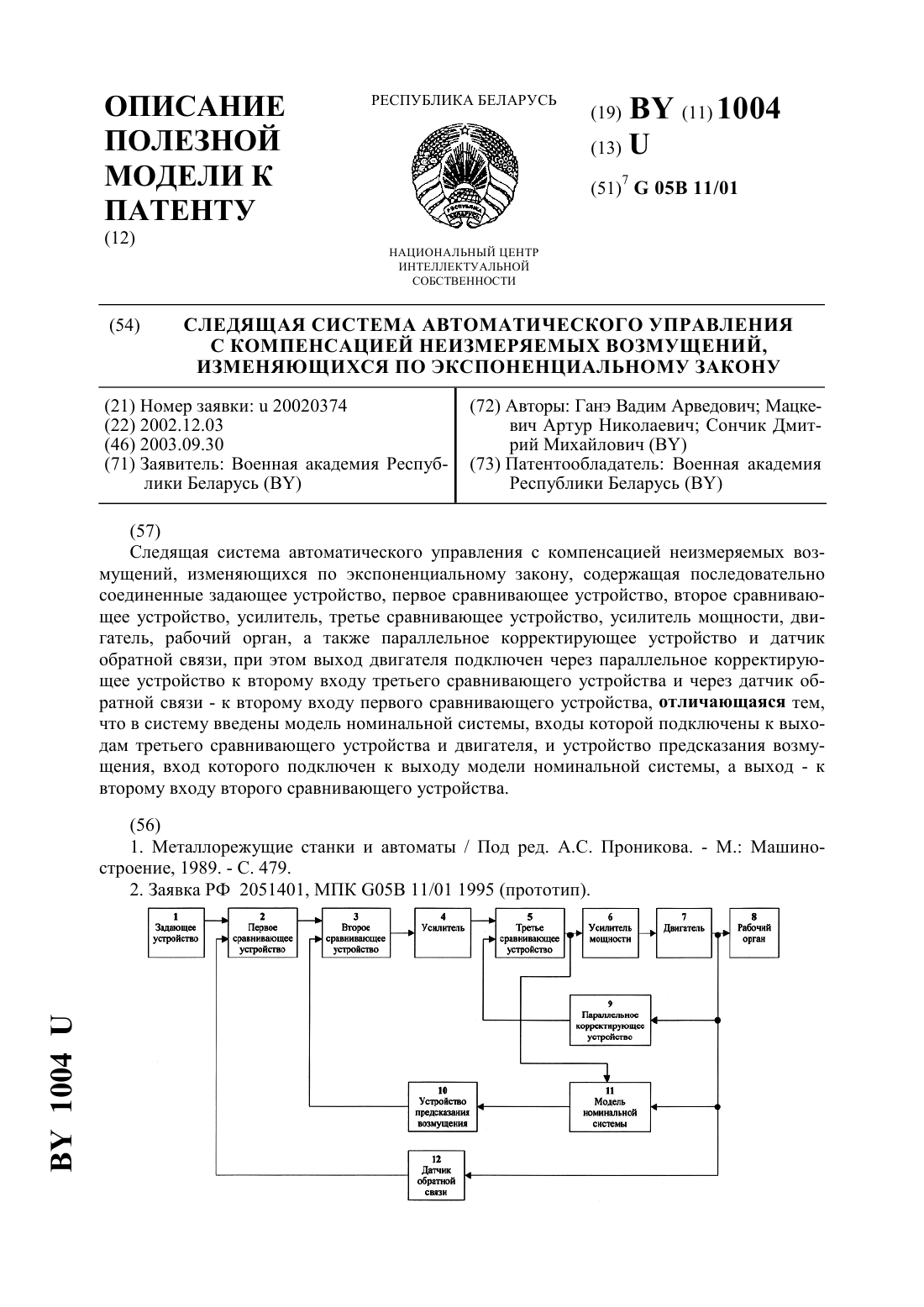
...к выходам третьего сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу второго сравнивающего устройства. На фиг. представлена функциональная схема ССАУ с компенсацией неизмеряемых возмущений, изменяющихся по экспоненциальному закону. ССАУ содержит задающее устройство 1, первое сравнивающее устройство 2, второе сравнивающее устройство...
Предыдущий патент: Следящая система автоматического управления с компенсацией неизмеряемых возмущений, коррелированных по экспоненциально-колебательному закону
Следующий патент: Полугусеничный ход колесного трактора
Случайный патент: Укупорочный колпачек для разъемной укупорки сосудов