Привод махолета
Текст
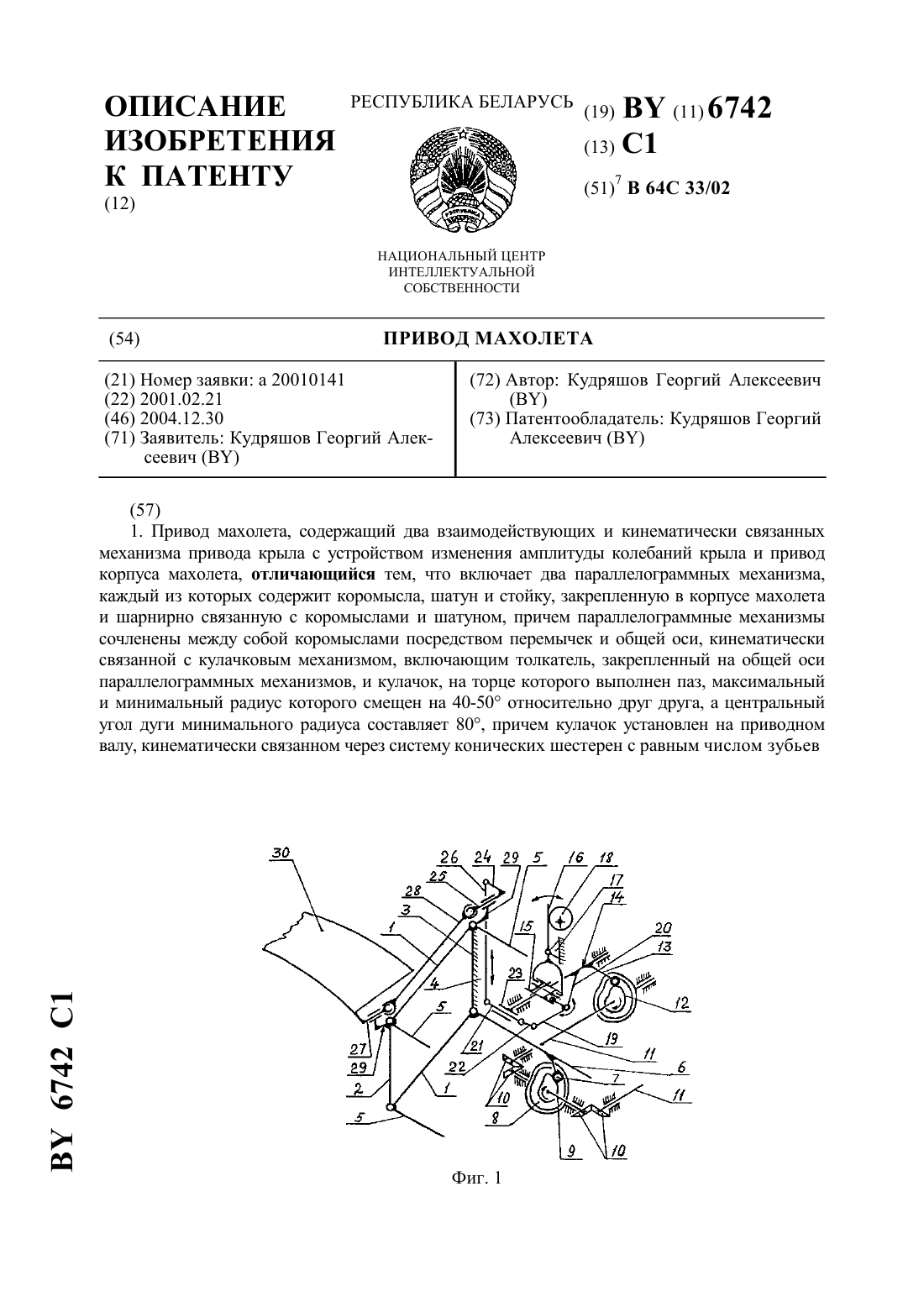
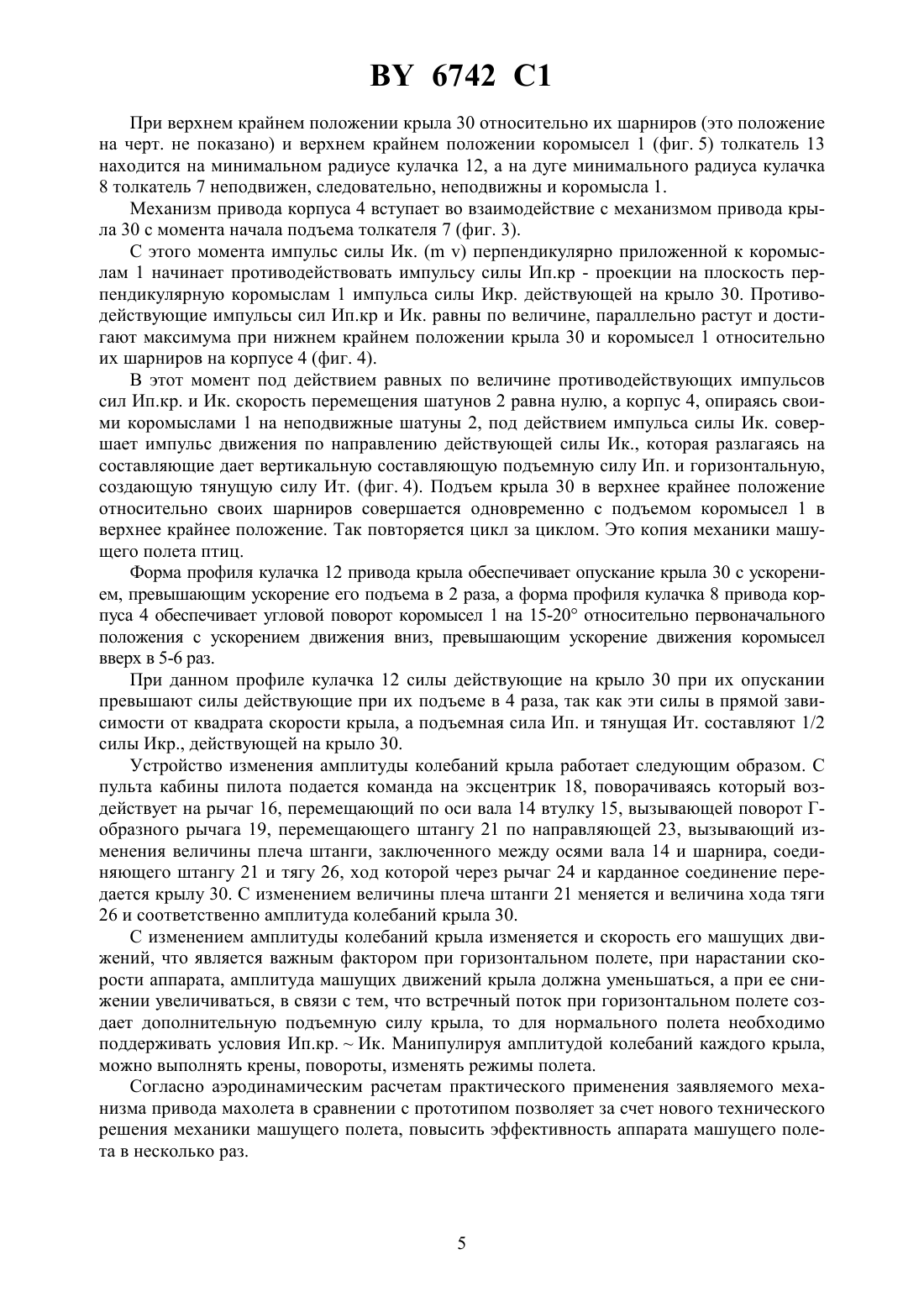
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Кудряшов Георгий Алексеевич(72) Автор Кудряшов Георгий Алексеевич(73) Патентообладатель Кудряшов Георгий Алексеевич(57) 1. Привод махолета, содержащий два взаимодействующих и кинематически связанных механизма привода крыла с устройством изменения амплитуды колебаний крыла и привод корпуса махолета, отличающийся тем, что включает два параллелограммных механизма,каждый из которых содержит коромысла, шатун и стойку, закрепленную в корпусе махолета и шарнирно связанную с коромыслами и шатуном, причем параллелограммные механизмы сочленены между собой коромыслами посредством перемычек и общей оси, кинематически связанной с кулачковым механизмом, включающим толкатель, закрепленный на общей оси параллелограммных механизмов, и кулачок, на торце которого выполнен паз, максимальный и минимальный радиус которого смещен на 40-50 относительно друг друга, а центральный угол дуги минимального радиуса составляет 80, причем кулачок установлен на приводном валу, кинематически связанном через систему конических шестерен с равным числом зубьев 6742 1 с ведущими валами механизмов привода крыла, на оси каждого из которых установлен кулачок, на торцах которого выполнен паз, максимальный и минимальный радиус которого смещены на 120 относительно друг друга, а его толкатель закреплен на качающемся валу механизма привода крыла с установленным на нем устройством изменения амплитуды колебаний крыла, содержащим втулку, подвижно установленную на качающемся валу посредством шлицевого соединения, на поверхности которой выполнены два окружных паза, в один из которых подвижно установлена вилка рычага, шарнирно закрепленного на неподвижной опоре,причем свободный конец рычага связан с пультом управления кабины пилота посредством эксцентрика, а в другой паз втулки подвижно установлено плечо Г-образного рычага, шарнирно связанного со штангой посредством серьги, при этом штанга, установленная в направляющей, которая перпендикулярно закреплена на торце качающегося вала, свободным концом шарнирно связана с рычагом ведущего карданного вала посредством тяги, а ведущий вал карданно сочленен с ведомым посредством промежуточного вала, при этом ведущий и ведомый валы шарнирно и параллельно установлены на Г-образных кронштейнах, закрепленных на стойке и шатуне параллелограммного механизма, а на ведомом карданном валу закреплено крыло. 2. Привод по п. 1, отличающийся тем, что нижнее крайнее положение коромысел относительно оси корпуса махолета составляет 45, причем угол между нижним и верхним крайними положениями коромысел составляет 15-20.(56)1121182 , 1984.2089461 1, 1997.4053122, 1977.2008239 1, 1994.878652, 1981.1818274 1, 1993. Известен привод крыла орнитоптера, содержащий коленчатый вал, связанный с двигателем и соединенный посредством карданного соединения с силовым элементом машущего крыла, который закреплен с возможностью продольного перемещения в корпусе орнитоптера с помощью сферической опоры, при этом шейка колена коленчатого вала выполнена в виде спрямленного участка цилиндрической спирали, а карданное соединение состоит из втулки, установленной на колене и соединенной посредством промежуточной втулки и стержня с вилкой силового элемента (а.с. СССР 487808, 1975). Недостаток этого привода заключается в существенной сложности его конструкции низкой эффективности машущих движений крыла. Также известен наиболее близкий к заявляемому привод крыла махолета, содержащий два кривошипно-шатунных механизма, шатуны которых шарнирно соединены с крылом махолета в точках разнесенных вдоль хорды, а механизм изменения углового положения кривошипов, выполненного в виде жестко соединенных с последним ведомых зубчатых колес, взаимодействующих между собой через систему шестерен, подвижно соединенных между собой с зубчатым колесом серьгами и рычагом, связанным с пультом управления(а.с. СССР 1121182, 1984). Данный привод позволяет дистанционно изменять угол установки крыла, а следовательно, силы тяги и подъемной силы. Недостатком указанного привода является низкая эффективность машущих движений крыла по нижеследующим причинам. Во-первых, кривошипы вращаются с постоянной угловой скоростью, следовательно, и крыло будет перемещаться вниз-вверх с одной скоростью, так что разница сил действую 2 6742 1 щих на крыло при его движениях вниз-вверх очень мала и то она будет обусловлена лишь только профилем крыла и формой его по длине. Во-вторых, при изменении углового положения крыла в область отрицательных углов атаки возрастает площадь крыла в направлении встречного потока, что увеличивает лобовое сопротивление крыла и чем больше этот угол, тем больше сопротивление. Кроме того,существуют максимально отрицательные углы атаки крыла, при которых еще возникает подъемная сила. Так, например, профиль крыла самолета УТ-2 предельный угол атаки-9 (Болотников В.Ф. Элементарный курс аэродинамики самолета. - М. Оборонгиз,1950. - С.71). При установке машущего крыла под таким углом тянущая сила ничтожно мала, а при последующем увеличении этого угла, подъемная сила переходит в отрицательную. Цель изобретения - повысить эффективность машущего полета. Поставленная цель достигается тем, что привод махолета содержит два взаимодействующих и кинетически связанных механизмов привода крыла с устройством изменения амплитуды колебаний крыла и привод корпуса махолета, включающего два параллелограммных механизма, каждый из которых содержит коромысла, шатун и стойку, закрепленную в корпусе махолета и шарнирно связанную с коромыслами и шатуном, причем параллелограммные механизмы сочленены между собой коромыслами посредством перемычек и общей оси, кинематически связанной с кулачковым механизмом, включающим толкатель, закрепленный на общей оси параллелограммных механизмов, и кулачок на торце которого выполнен паз, максимальный и минимальный радиус которых смещен на 40-50 относительно друг друга, а центральный угол дуги минимального радиуса составляет 80, причем, кулачок установлен на приводном валу, кинематически связанном через систему конических шестерен с равным числом зубьев с ведущими валами механизмов привода крыла, на оси каждого из которых установлен кулачок, на торцах которого выполнен паз, максимальный и минимальный радиус которого смещены на 120 относительно друг друга, а его толкатель закреплен на качающемся валу механизма привода крыла с установленным на нем устройством изменения амплитуды колебания крыла, содержащим втулку, подвижно установленную на качающемся валу посредством шлицевого соединения, на поверхности которой выполнены два окружных паза, в один из которых подвижно установлена вилка рычага, шарнирно закрепленного на неподвижной опоре, причем, свободный конец рычага связан с пультом управления кабины пилота, например, посредством эксцентрика, а в другой паз втулки подвижно установлено плечо Г-образного рычага на кронштейне, жестко закрепленном на качающемся валу, причем плечо Г-образного рычага шарнирно связано со штангой посредством серьги, при этом штанга установленная в направляющей, которая перпендикулярно закреплена на торце качающегося вала, свободным концом шарнирно связана с рычагом ведущего карданного вала посредством тяги, а ведущий вал карданно сочленен с ведомым посредством промежуточного вала, при этом ведущий и ведомый валы шарнирно и параллельно установлены на Г-образных кронштейнах, закрепленных на стойке и шатуне параллелограммного механизма, а на ведомом карданном валу закреплено крыло, при этом нижнее крайнее положение коромысел относительно оси корпуса махолета составляет 45, причем угол между нижним и верхним крайними положениями коромысел составляет 15-20. Техническая сущность предлагаемого решения поясняется прилагаемыми чертежами,где на фиг. 1 показано с частичным выровом принципиальная схема механизма привода махолета на фиг. 2 профиль кулачка привода крыла и положение его профиля относительно толкателя при нижнем крайнем положении крыла на фиг. 3 профиль кулачка привода корпуса махолета и положение его профиля относительно толкателя при нижнем крайнем положении коромысел параллелограммного механизма на фиг. 4 положение корпуса махолета относительно его первоначального (обозначено штрих пунктирной линией) при нижнем крайнем положении крыла относительно его шарнира (на чертеже не 3 6742 1 показано) и нижнем крайнем положении коромысел относительноего шарниров на корпусе махолета, а импульсы сил действующих на крыло и корпус махолета имеют следующее буквенное обозначение Ик. - импульс силы действующей на корпус махолета Икр.импульс силы действующей на крыло Ип.кр. - импульс проекции силы Икр. на плоскость перпендикулярную коромыслу Ип. - импульс подъемной силы Ит. - импульс тянущей силы на фиг. 5 верхнее крайнее положение коромысел относительно их нижнего крайнего положения (обозначено штрихпунктирной линией). Привод махолета содержит два взаимодействующих и кинематически связанных механизма привода крыла с устройством изменения амплитуды колебания крыла и привод корпуса махолета, включающий два параллелограммных механизма, каждый из которых содержит коромысла 1, шатун 2 и стойку 3, закрепленную в корпусе 4 махолета и шарнирно связанную с коромыслами 1 и шатуном 2, причем параллелограммные механизмы сочленены между собой коромыслами 1 посредством перемычек 5 и общей оси 6, кинематически связанной с кулачковым механизмом, включающим толкатель 7 закрепленный на общей оси 6 параллелограммных механизмов и кулачок 8, на торце которого выполнен паз,максимальный и минимальный радиус которого смещен на 40-50 относительно друг друга, а центральный угол дуги минимального радиуса составляет 80, причем кулачок установлен на приводном валу, кинематически связанном через систему конических шестерен 10 с равным числом зубьев с ведущими валами 11 механизмов привода крыла, на оси 11 каждого из которых установлен кулачок 12, на торце которого выполнен паз, максимальный и минимальный радиус которого смещен на 120 относительно друг друга, а его толкатель 13 закреплен на качающемся валу 14 механизма привода крыла с установленным на нем устройством изменения амплитуды колебаний крыла, содержащем втулку 15, подвижно установленной на качающемся валу 14 посредством шлицевого соединения, на поверхности которой выполнены два окружных паза, в один из которых подвижно установлена вилка рычага 16, шарнирно установленного на неподвижной опоре 17, причем свободный конец рычага 16 связан с пультом управления кабины пилота, например,посредством эксцентрика 18, а в другой паз втулки подвижно установлено плечо Гобразного рычага 19, шарнирно установленном на кронштейне 20, жестко закрепленном на качающемся валу 14, причем плечо Г-образного рычага 19 шарнирно связано со штангой 21 посредством серьги 22, при этом штанга 21, установленная в направляющей 23, которая перпендикулярно закреплена на торце качающегося вала 14, свободным концом шарнирно связана с рычагом 24 ведущего карданного вала 25 посредством тяги 26, а ведущий вал 25 карданно сочленен с ведомым 27 посредством промежуточного вала 28, при этом ведущий 25 и ведомый 27 валы шарнирно и параллельно установлены на Г-образных кронштейнах 29, закрепленных на стойке 3 и шатуне 2 параллелограммного механизма, а на ведомом карданном валу 27 закрепленного крыло 30, при этом нижнее крайнее положение коромысла 1 относительно оси корпуса 4 махолета составляет 45, причем угол между нижним и верхним крайними положениями коромысел 1 составляет 15-20. Работа привода махолета заключается во взаимодействии двух кинематически связанных механизмов привода крыла и привода корпуса махолета. Начало работы привода махолета описано с верхнего крайнего положения крыла 30 и коромысел 1 (фиг. 5). Работает механизм привода махолета следующим образом. От двигателя (на черт. не показан). Вращение приводного вала 9 через кулачок 8 передается толкателю 7, который ось 6, а вместе с ним и коромысла 1 приводит в качательное движение. Одновременно с вращением вала 9 через шестерни 10 во вращение приводятся и валы 11 привода крыла,кулачок 12 которого через толкатель 13, вал 14, штангу 21, тягу 26, рычаг 24 и карданное соединение приводит в колебательное движение крыло 30. Взаимодействие привода крыла и привода корпуса махолета осуществляется следующим образом. 6742 1 При верхнем крайнем положении крыла 30 относительно их шарниров (это положение на черт. не показано) и верхнем крайнем положении коромысел 1 (фиг. 5) толкатель 13 находится на минимальном радиусе кулачка 12, а на дуге минимального радиуса кулачка 8 толкатель 7 неподвижен, следовательно, неподвижны и коромысла 1. Механизм привода корпуса 4 вступает во взаимодействие с механизмом привода крыла 30 с момента начала подъема толкателя 7 (фиг. 3). С этого момента импульс силы Ик. ( ) перпендикулярно приложенной к коромыслам 1 начинает противодействовать импульсу силы Ип.кр - проекции на плоскость перпендикулярную коромыслам 1 импульса силы Икр. действующей на крыло 30. Противодействующие импульсы сил Ип.кр и Ик. равны по величине, параллельно растут и достигают максимума при нижнем крайнем положении крыла 30 и коромысел 1 относительно их шарниров на корпусе 4 (фиг. 4). В этот момент под действием равных по величине противодействующих импульсов сил Ип.кр. и Ик. скорость перемещения шатунов 2 равна нулю, а корпус 4, опираясь своими коромыслами 1 на неподвижные шатуны 2, под действием импульса силы Ик. совершает импульс движения по направлению действующей силы Ик., которая разлагаясь на составляющие дает вертикальную составляющую подъемную силу Ип. и горизонтальную,создающую тянущую силу Ит. (фиг. 4). Подъем крыла 30 в верхнее крайнее положение относительно своих шарниров совершается одновременно с подъемом коромысел 1 в верхнее крайнее положение. Так повторяется цикл за циклом. Это копия механики машущего полета птиц. Форма профиля кулачка 12 привода крыла обеспечивает опускание крыла 30 с ускорением, превышающим ускорение его подъема в 2 раза, а форма профиля кулачка 8 привода корпуса 4 обеспечивает угловой поворот коромысел 1 на 15-20 относительно первоначального положения с ускорением движения вниз, превышающим ускорение движения коромысел вверх в 5-6 раз. При данном профиле кулачка 12 силы действующие на крыло 30 при их опускании превышают силы действующие при их подъеме в 4 раза, так как эти силы в прямой зависимости от квадрата скорости крыла, а подъемная сила Ип. и тянущая Ит. составляют 1/2 силы Икр., действующей на крыло 30. Устройство изменения амплитуды колебаний крыла работает следующим образом. С пульта кабины пилота подается команда на эксцентрик 18, поворачиваясь который воздействует на рычаг 16, перемещающий по оси вала 14 втулку 15, вызывающей поворот Гобразного рычага 19, перемещающего штангу 21 по направляющей 23, вызывающий изменения величины плеча штанги, заключенного между осями вала 14 и шарнира, соединяющего штангу 21 и тягу 26, ход которой через рычаг 24 и карданное соединение передается крылу 30. С изменением величины плеча штанги 21 меняется и величина хода тяги 26 и соответственно амплитуда колебаний крыла 30. С изменением амплитуды колебаний крыла изменяется и скорость его машущих движений, что является важным фактором при горизонтальном полете, при нарастании скорости аппарата, амплитуда машущих движений крыла должна уменьшаться, а при ее снижении увеличиваться, в связи с тем, что встречный поток при горизонтальном полете создает дополнительную подъемную силу крыла, то для нормального полета необходимо поддерживать условия Ип.кр.Ик. Манипулируя амплитудой колебаний каждого крыла,можно выполнять крены, повороты, изменять режимы полета. Согласно аэродинамическим расчетам практического применения заявляемого механизма привода махолета в сравнении с прототипом позволяет за счет нового технического решения механики машущего полета, повысить эффективность аппарата машущего полета в несколько раз. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 6
МПК / Метки
МПК: B64C 33/02
Код ссылки
<a href="https://by.patents.su/6-6742-privod-maholeta.html" rel="bookmark" title="База патентов Беларуси">Привод махолета</a>
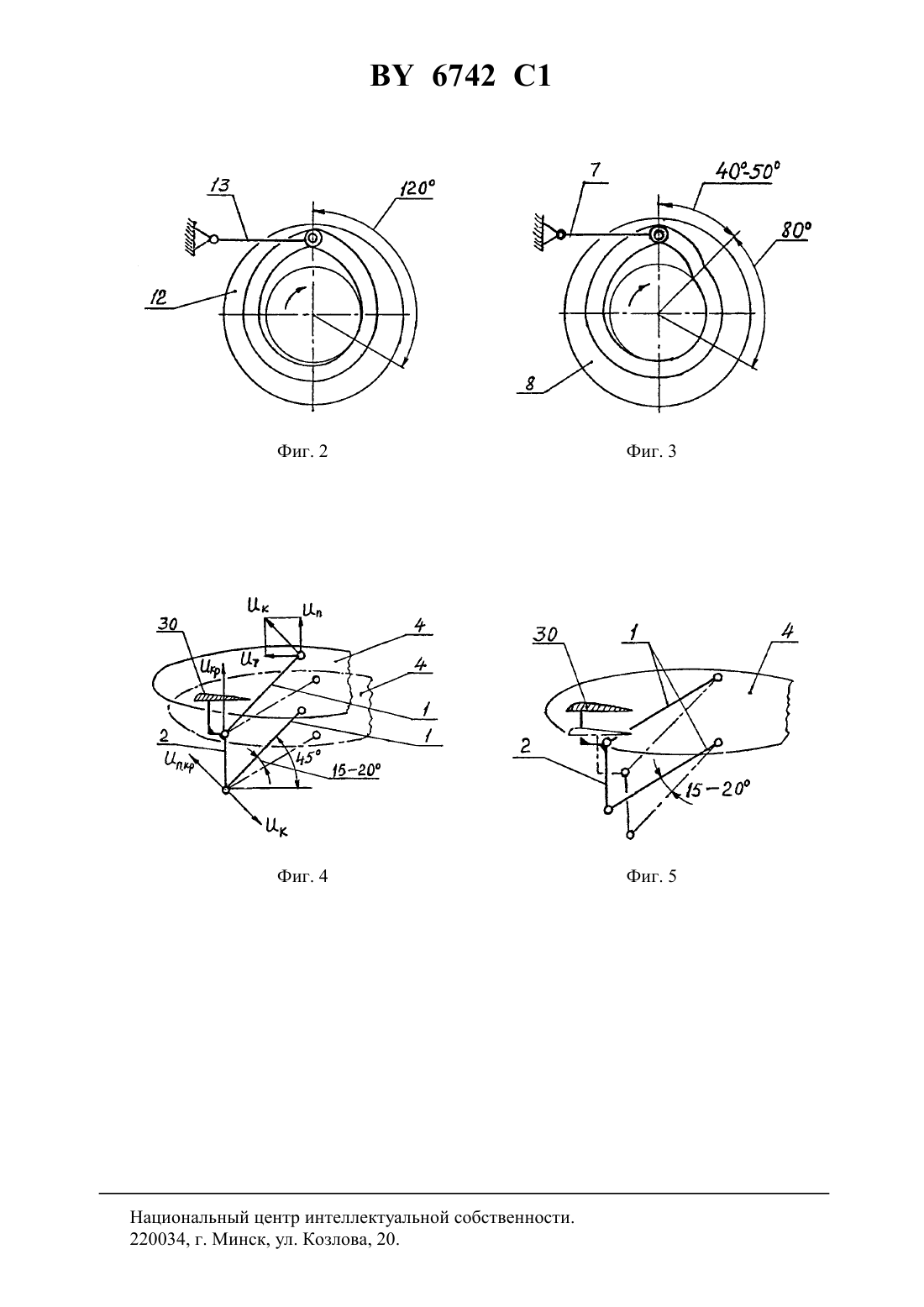
Тросовый привод сцепления
Номер патента: U 1262
Опубликовано: 30.03.2004
Автор: Киреев Олег Николаевич
МПК: B60K 23/02
Метки: привод, сцепления, тросовый
Текст:
...Шток пневмоусилителя под давлением сжатого воздуха перемещает двуплечий 2 1262 рычаг и тем самым выключает сцепление. При отпускании педали она под действием пружины вместе с тросом, рычагом педали и пневмоклапаном возвращается в исходное положение, сообщая пневмокамеру с атмосферой. Основным недостатком данного привода является сложная конструкция привода сцепления из-за наличия дополнительного промежуточного звена в виде пластины и...
Привод вала отбора мощности транспортного средства

Номер патента: 2357
Опубликовано: 30.09.1998
Авторы: Кузнецов Антон Дмитриевич, Шевик Юрий Михайлович, Болвако Иван Иванович, Амельченко Петр Адамович, Трусевич Георгий Георгиевич, Мелешко Михаил Григорьевич
МПК: B60K 17/28
Метки: мощности, отбора, привод, средства, транспортного, вала
Текст:
...элементом передачи крутящего момента, по крайней мере, один дополнительный элемент передачи крутящего момента упомянутой свободно установленной шестерни и соосную ей муфту, снабженную, по крайней мере, одним элементом передачи крутящего момента и установленную с возможностью осевого перемещения. Кинематическая связь ведомого вала привода с ближайшим к входному валу ведомым валом коробки передач может быть выполнена в виде устройства передачи...
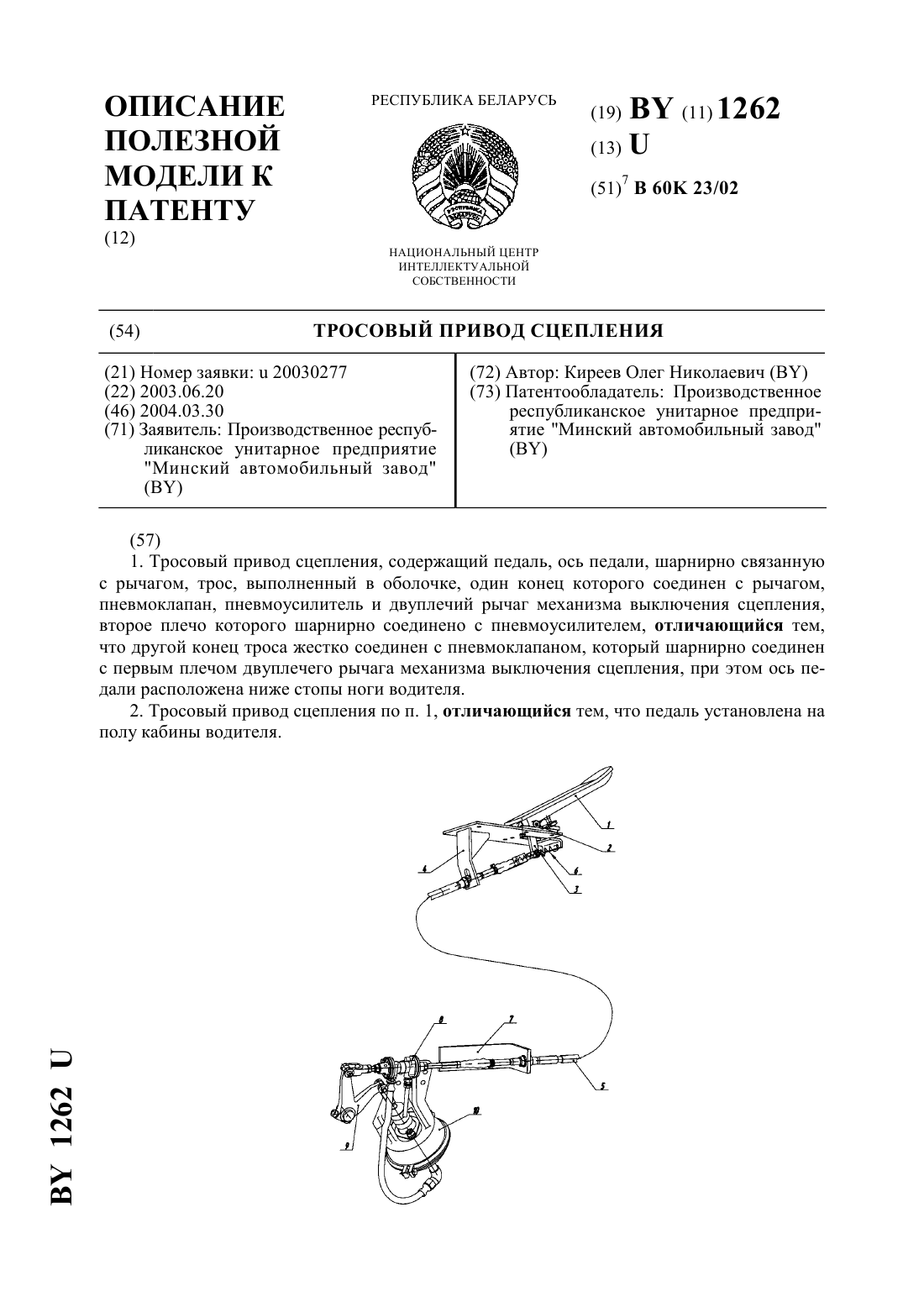
Гидропневматический привод сцепления транспортного средства
Номер патента: 1665
Опубликовано: 30.03.1997
Авторы: Евстратовский Александр Владимирович, Захарик Андрей Михайлович, Торгонский Анатолий Романович, Лобачевский Леонид Борисович
МПК: B60K 23/02
Метки: привод, средства, сцепления, транспортного, гидропневматический
Текст:
...упрощении конструкции благодаря исключению оттяжной пружины рычага. Поставленная задача выполняется благодаря тому, что в гидропневматическом приводе сцепления транспортного средства, содержащем педаль сцепления с оттяжной пружиной, главный гидроцилиндр, сообщенный с пневмоусилителем, снабженным подпружиненным поршнем, кинематически связанным с рычагом вала вилки выключения сцепления, и выжимной подшипник, установленный с возможностью...
Привод для эскалаторов
Номер патента: 1884
Опубликовано: 30.12.1997
Автор: Петер Хефлинг
МПК: B66B 23/02
Метки: привод, эскалаторов
Текст:
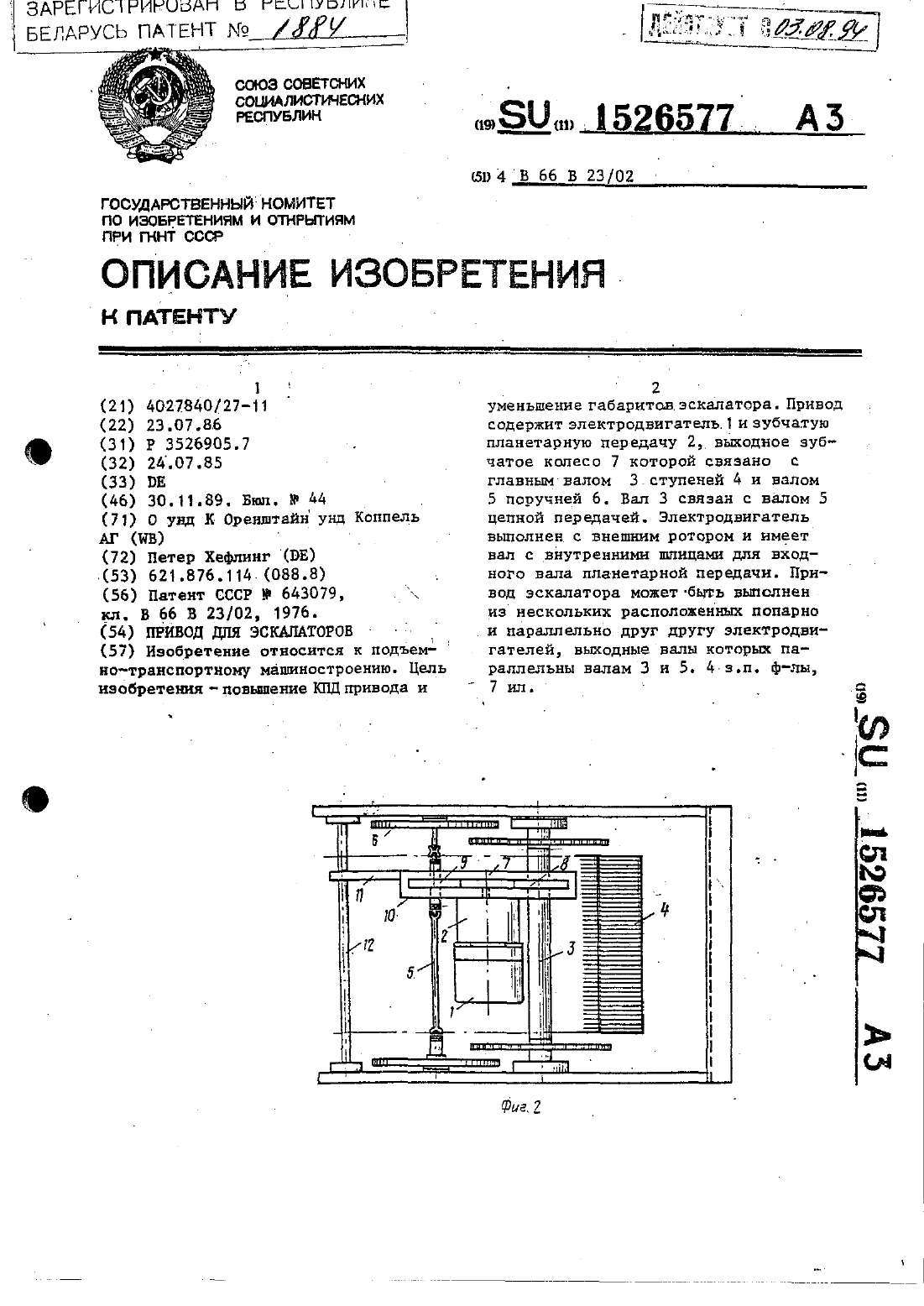
...состоящей из звездочек 13 и приводной цепи 14, в том случае,когда планетарная передача находится в зацеплении с главным валом 3.Привод эскалатора может быть выполнен в виде двух установленных параллельно с одной стороны корпуса 10 распределительной передачи электродвигателей 1 и двух планетарных передач 2, находящихся в зацеплении с главным валом 3 ступенека и валом 5 поручней 6.илн только с главным валом 3 ступенек 4. Привод...
Привод режущего аппарата
Номер патента: 670
Опубликовано: 30.06.1995
Авторы: Михалькевич И. В., Богдашич Е. Е., Шумский К. В., Зимбицкий В. А., Докукова Н. А., Бойко Л. И., Поддубко С. Н.
МПК: A01D 34/02
Метки: аппарата, привод, режущего
Текст:
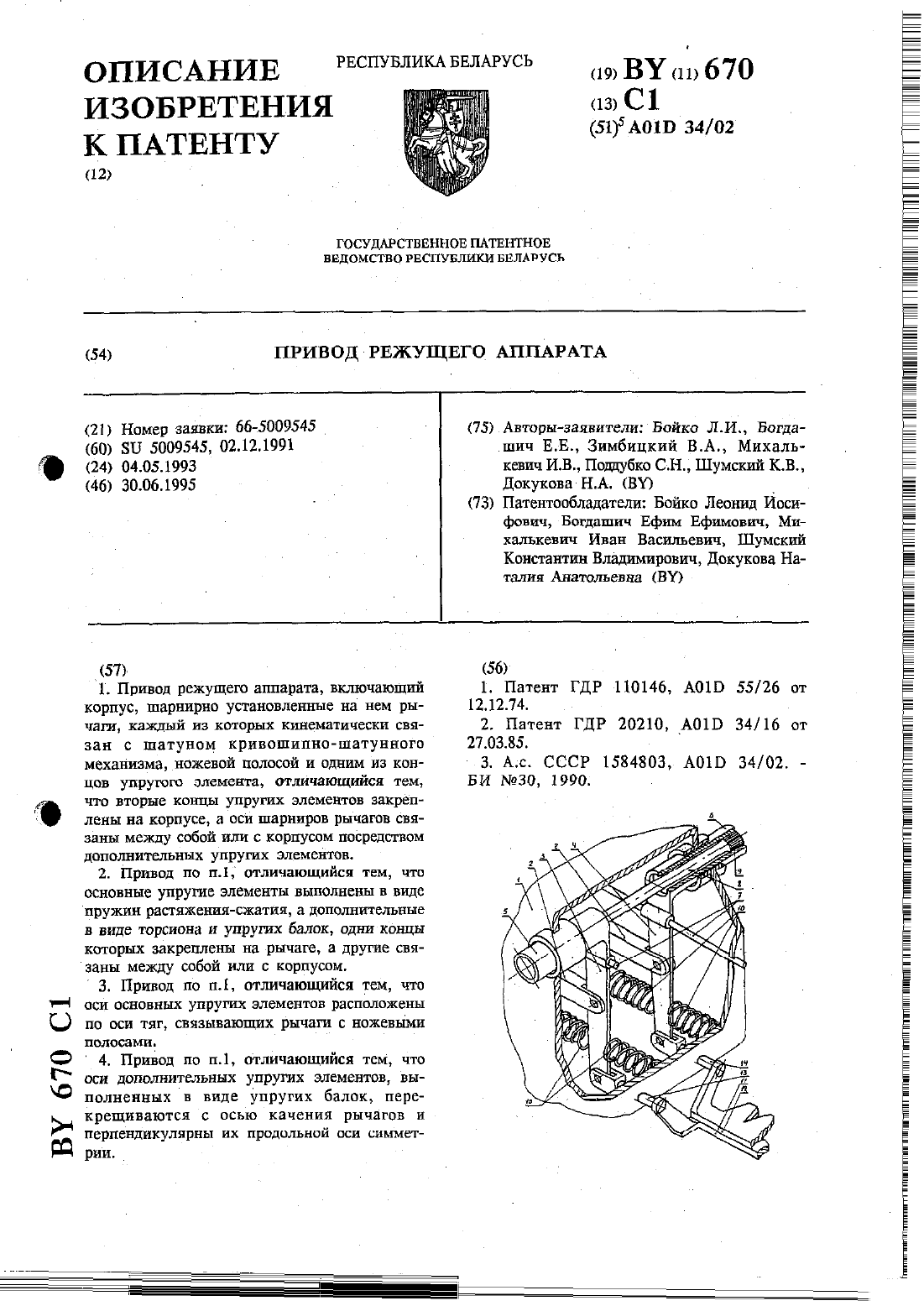
...использовать кривошипно-шатунный механизм, спроектированный, например, длярабочей частоты 500 об/ мин, для частот 850 и 1000 об/ мин, путем подключения одною или нескольких упругих элементов, имеющих соответствующую приведенную жесткость для создания совместно с массой ножевого аппарата колебательной динамической системы, имеющей собственную частоту, близкую к рабочей частоте привода. В таких условиях нагрузка на детали кривошипношатуиного...
Предыдущий патент: Сферическая опора
Следующий патент: Сельскохозяйственная уборочная машина
Случайный патент: Электронный тонкопленочный элемент