Привод режущего аппарата
Номер патента: 670
Опубликовано: 30.06.1995
Авторы: Бойко Л. И., Зимбицкий В. А., Шумский К. В., Поддубко С. Н., Богдашич Е. Е., Михалькевич И. В., Докукова Н. А.
Текст
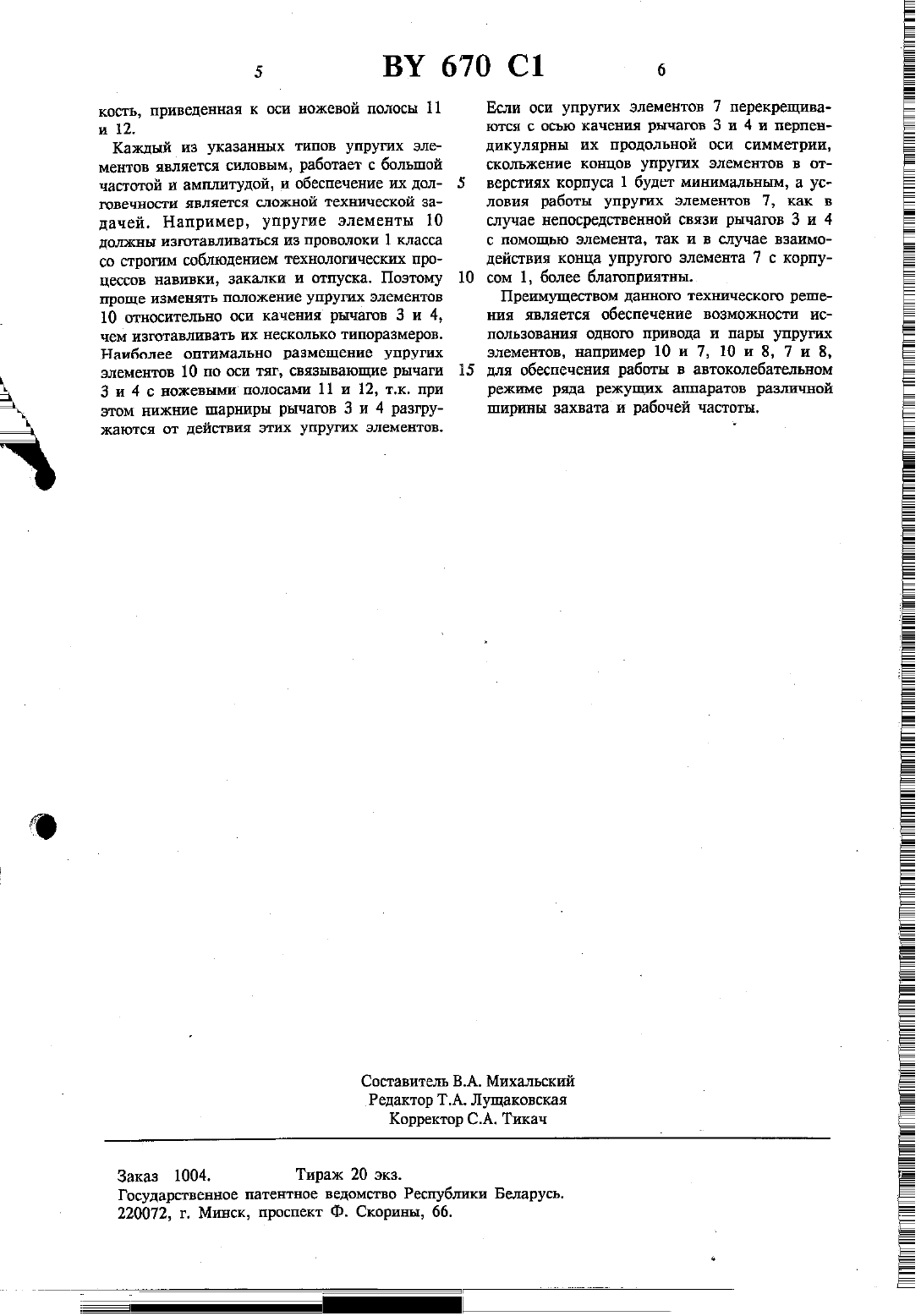
1 А 2 ГОСУДАРПТБЕННОЕ ПА 1 ЕНГНОЕ ВЕДОМСТВО РЕСПУБЛИКИ БЕЛАРУСЬ 54 пРИвОд РЕЖУЩЕГО АППАРАТА(73) Патентообладатели Бойко Леонид Иосифович, Богдашич Ефим Ефимович, Михалькевич Иван Васильевич, Шумский Константин Владимирович, Докукова Наталия Анатольевна ЕВУ)51. Привод режущего аппарата, включающий корпус, шарнирно установленные на нем рычаги, каждый из которых кинематически связан с шатуном кривошипно-шатуииого механизма, Ножевой полосой и одним из концов упругого элемента, отличающийся тем,что вторые концы упругих элементов закреплены на корпусе, а оси шарниров рычагов связаны между собой или с корпусом посредством дополнительных упругих элементов.2. Привод по п.1, отличающийся тем, что основные упругие элементы выполнены в виде пружин растяжения-сжатия, а дополнительные в виде торсиона и упругих балок, ОДНИ концы которых закреплены на рычаге, а другие связаны между собой или с корпусом.3. Привод по п.1, отличающийся тем, что оси основных упругих элементов расположены по оси тяг, связывающих рычаги с ножевыми полосами.4. Привод по п.1, отличающийся тем, что оси дополнительных упругих элементов, выполненных в виде упругих балок, перекрещиваются с осью качения рычагов и перпендикулярны их продольной оси симметрии.Изобретение относится к сельскохозяйственному машиностроению, а именно к механизмам привода режущего аппарата косилок и жаток.В современных уборочных машинах широкое распространение имеют режущие аппараты с возвратно-поступательным движением ножевой полосы. Их простота и высокие технологические свойства не всегда могут быть реализованы из-за присущих подобным режущим аппаратам высоких инерционных нагрузок.Для снижения динамической нагруженности деталей от. инерционных сил воэвратно-поступательно движущихся масс в структуру привода вводят упругие элементы, создающие колебательный контур 1.Другим способом снижения динамическойнагруженности является применение двухно-жевого безпальцевого режущего аппарата,привод которого осуществляется обычно от кривопшпно-шатунного механизма 2.Недостатками этих механизмов являются большие затраты для создания гаммы жатвенных механизмов различной ширины захвата и рабочей частоты вращения, связанные с изменением размеров наиболее трудоемких деталей кривошипно-шатунного механизма и упругих элементов, обеспечение долговечности которых весьма актуально.Из известных конструкций приводов режушик агшаратов наиболее близким по конструкции является привод, включающий в себя корпус, кривошипно-шатунный механизм и промежуточные рычаги, связывающие шатуны кривопщпно-шатунного механизма с подвижными ножевыми полосами З.Недостатком этой конструкции является невозможность эффективного использования ее в широком диапазоне ширин захвата и частот работы ножевых полос.Задача изобретения - унификация приводов режущих аппаратов путем применения одною типоразмера кривоштшно-шатунного механизма ДЛЯ ряда режущих ЗППЗРЗТОВ, ИМЕЮЩИХ различные рабочие частоты и широты захвата.Эта задача решается тем, что в известном приводе двухножевого режущего аппарата,включающем корпус, шарнирно установленные в нем рычаги, каждый из которых кинематически СВЯЗЗН С шатуном кривошипво-шатунного механизма и одним концом упругого элемента, второй конец упругого элемента закреплен на корпусе, а оси шарниров рычагов связаны между собой или с корпусом посредством дополнительных упругих элементов.Подобное размещение упругих элементов позволяет использовать кривошипно-шатунный механизм, спроектированный, например, длярабочей частоты 500 об/ мин, для частот 850 и 1000 об/ мин, путем подключения одною или нескольких упругих элементов, имеющих соответствующую приведенную жесткость для создания совместно с массой ножевого аппарата колебательной динамической системы, имеющей собственную частоту, близкую к рабочей частоте привода. В таких условиях нагрузка на детали кривошипношатуиного механизма РЕЗКО СНИЖЗЕТСЯ, И ее МЗКСИМЭДШНОС ЗНЗЧНИЕ не превосходит величин, характерных для привода с частотой 500 об/ мин. Тот же механизм совместно с уругими элементами может быть использован для режущих аппаратов различной ширины захвата при одинаковой рабочей частоте.На рисунке изображена принципиальная схема предлагаемого привода.Привод режущего аппарата включает в себя корпус 1, кривошипно-шатуниый механизмРычаги 3 и 4 снабжены втулками 5 и 6 соответственно и взаимодействуют между собой посредством упругих элементов 7 и/ или 8. Шпицы 9 связывают втулки 5 и 6 с упругим элементом 8. Втушш 5 и 6 при работе поворачиваются в отверстиях корпуса 1. Упругие элементы 10 помещены с обеих сторон рычагов З и 4 и взаимодействуют с ними и корпусом 1. Нижние концы рычагов 3 и 4 взаимодействуют с ножевыми полосами 11 и 12 посредством тяг 13 и 14.Привод режущего аппарата работает следующим образом.При вращении вала кривошипно-шатунного механизма (не показан) шатуны 2 совершают плоско-параллельное движение, связанные с ними рычаги 3 и 4 совершают при этом качательные движения, а ножевые полосы 11 и 12 возвратив-поступательные. Одновременно происходит деформация упругих элементов 7 и/или 8, и/Или 10. Число одновременно работающих упругих элементов и их суммарную жесткость выбирают из условия максимального приближения собственной частоты колебательной системы, образованной массой Ножевой полосы 11 или 12, моментом инерции рычагов З или 4 и упругими элементами 7 и/Идти 8,н/или 10. Калоши из показанных типов упругих элементов имеет свои весовые, жесткостные и компоновочные особенности и свои ограничения по применимости. Они могут применяться как совместно, так и порознь.Элементы 7 и 8 могут быть снабжены устройствами, регулирующими их рабочую длину, а следовательно и жесткость. Элементы 10 могут устанавливаться на различном расстоянии от оси качения рычагов 3 и 4. Тем самым также будет изменяться их жест Окость, приведенная к оси НОЖСВОЙ полосы 11 и 12.Каждый из указанных типов упругих элементов является силовым, работает с большой ЧЭСТОТОЙ И ЗМПЛИТУДОЙ, И ОБЕСПЕЧЕНИЕ ИХ ДОЛювечности является сложной технической задачей. Например, упругие элементы 10 ДОЛЭКНЫ ИЗГОТЗВЛИВЗТЬСЯ ИЗ ПРОВОЛОКИ 1 класса со строгим соблюдением технологических процессов навивки, закалит и отпуска. Поэтому ПРОЩЕ ИЗМЕНЯТЬ ПОЛОЖЕНИЕ упругих ЭЛЕМЕНТОВ 10 относительно оси качении рычагов 3 и 4,ЧЕМ ИЗГОТНВЛИВЗТЬ ИХ НЕСКОЛЬКО типоразмеров.Наиболее оптимально размещение упругих элементов 10 по оси тяг, связывающие рычагиЭТОМ НИЖНИЕ шарниры РЫЧЕШОВ 3 И 4 разгруЖВЮТСЯ ОТ ДЕЙСТВИЯ ЭТИХ УПРУГШХ ЭЛЕМЕНТОВ.Если оси упругих элементов 7 перекрещиваются с осью качения рычагов З и 4 и перпендикулярны их продольной оси симметрии,скольжение концов упругих элементов в отверстиях корпуса 1 будет минимальным, а условил работы упругих элементов 7, как в случае непосредственной связи рычагов 3 и 4 с помощью элемента, так и в случае взаимодействия конца упругого элемента 7 с корпусом 1, более благоприятны.Преимуществом данного технического решения является обеспечение возможности использования одного привода и пары упругих элементов, например 10 и 7, 10 и 8, 7 и 8,для обеспечения работы в автоколебательном режиме ряда режущих аппаратов различной ширины захвата и рабочей частоты.Государственное патентное ведомство Республики Беларусь.ППШШПШГПГШППТПШЛШПТПШППЛПТПГППШПТПГПШШ ППИПШП НМ ШПШПИППШШТГШМПШПШШЛ
МПК / Метки
МПК: A01D 34/02
Метки: привод, режущего, аппарата
Код ссылки
<a href="https://by.patents.su/3-670-privod-rezhushhego-apparata.html" rel="bookmark" title="База патентов Беларуси">Привод режущего аппарата</a>
Механизм поворота лопаток осевого направляющего аппарата вентилятора
Номер патента: 416
Опубликовано: 30.03.1995
Автор: Фельдман Айзик Иосифович
МПК: F04D 29/56, F04D 27/00
Метки: осевого, поворота, аппарата, лопаток, направляющего, механизм, вентилятора
Текст:
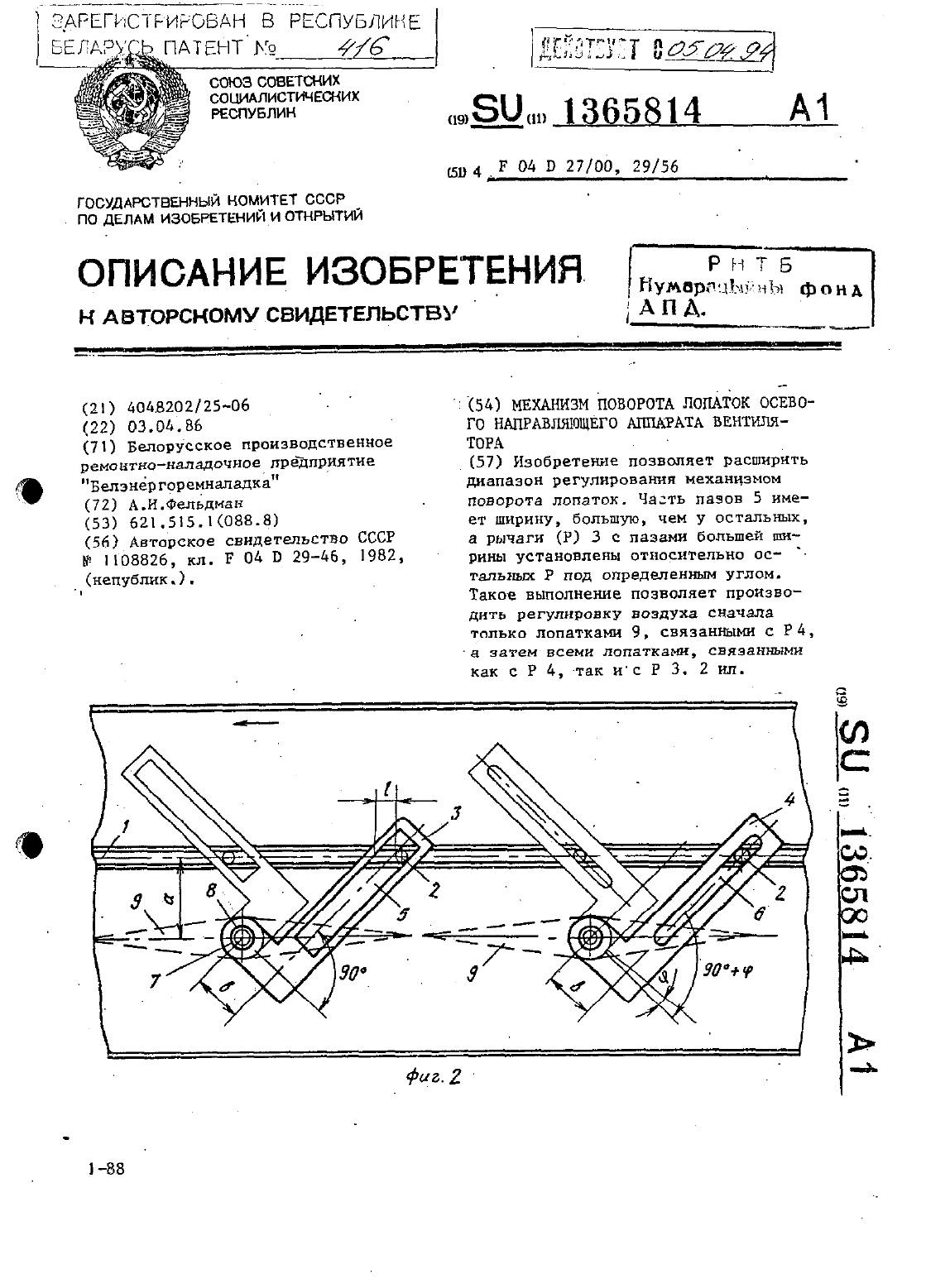
...расположенные по 15 Рычагамш 3 И 4 окружности рычаги 3, 4 с щелевымипа зам 5, 6 и отверстиями 7, смещенны Ф О Р М У Л а ИЗ О 5 Р Е Т О Й И Я иотносительно продольных осей па- эов 5 6, причем штифты 2 приводного Механизм поворота лопаток осевого- кольца 1 размещены в пазах 5,б рыча 20 направляющего аппарата вентилятора,гов 3, 4, а цапфы 8 поворотных лопа- СОДЕРЖаЩНйиПРИВОдНОе КОЛЬЦО СО Штифток 9 в отверстиях 7, причем част там,...
Устройство для соединения двух монолитных пакетов конденсаторов в блок
Номер патента: 285
Опубликовано: 30.12.1994
Авторы: Афанасенко Н. Л., Прищепов В. Н., Рябов А. П.
МПК: H01G 13/00
Метки: соединения, пакетов, двух, устройство, монолитных, конденсаторов, блок
Текст:
...Механизм 10 базирования выполнен в виде двух планок,способных приближаться к блоку для его базирования. Механизм 11 прижима выполнен в виде подвижного рычага. Механизм 12 раскрытия рьтчагоа ВЫПОЛНЕН В виде ПО ДВИЖНОГО ШТОКЭ. ОСНЭЩВННОГО круглым УПО ром для воздействия на рычаги. Механизм 13 раскладки на транспортер выполнен в виде поворотного рычага с закрепленной на нем вакуумной лрисоской. Транспортер 14 выполнен в виде металлической...
Предыдущий патент: Пеномоющее средство
Следующий патент: Керамический материал, преимущественно для низкочастотных конденсаторов
Случайный патент: Устройство для лечения парафункций жевательных мышц