Устройство контроля геометрической формы внутренних цилиндрических и сложнопрофильных поверхностей
Номер патента: U 1485
Опубликовано: 30.09.2004
Авторы: Зуев Владимир Павлович, Дедков Андрей Иванович, Плавинский Валерий Антонович, Зайцев Валентин Андреевич
Текст
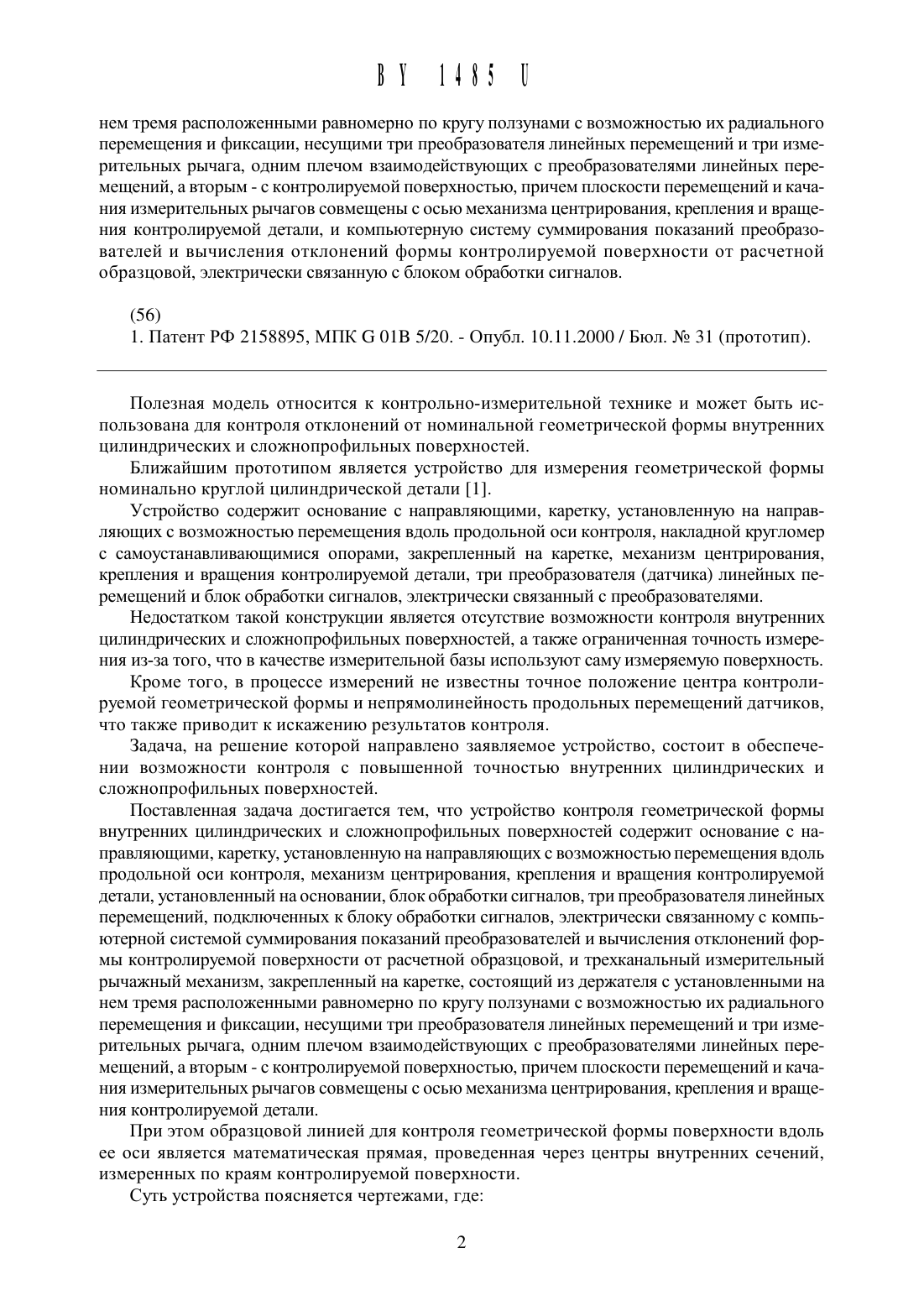
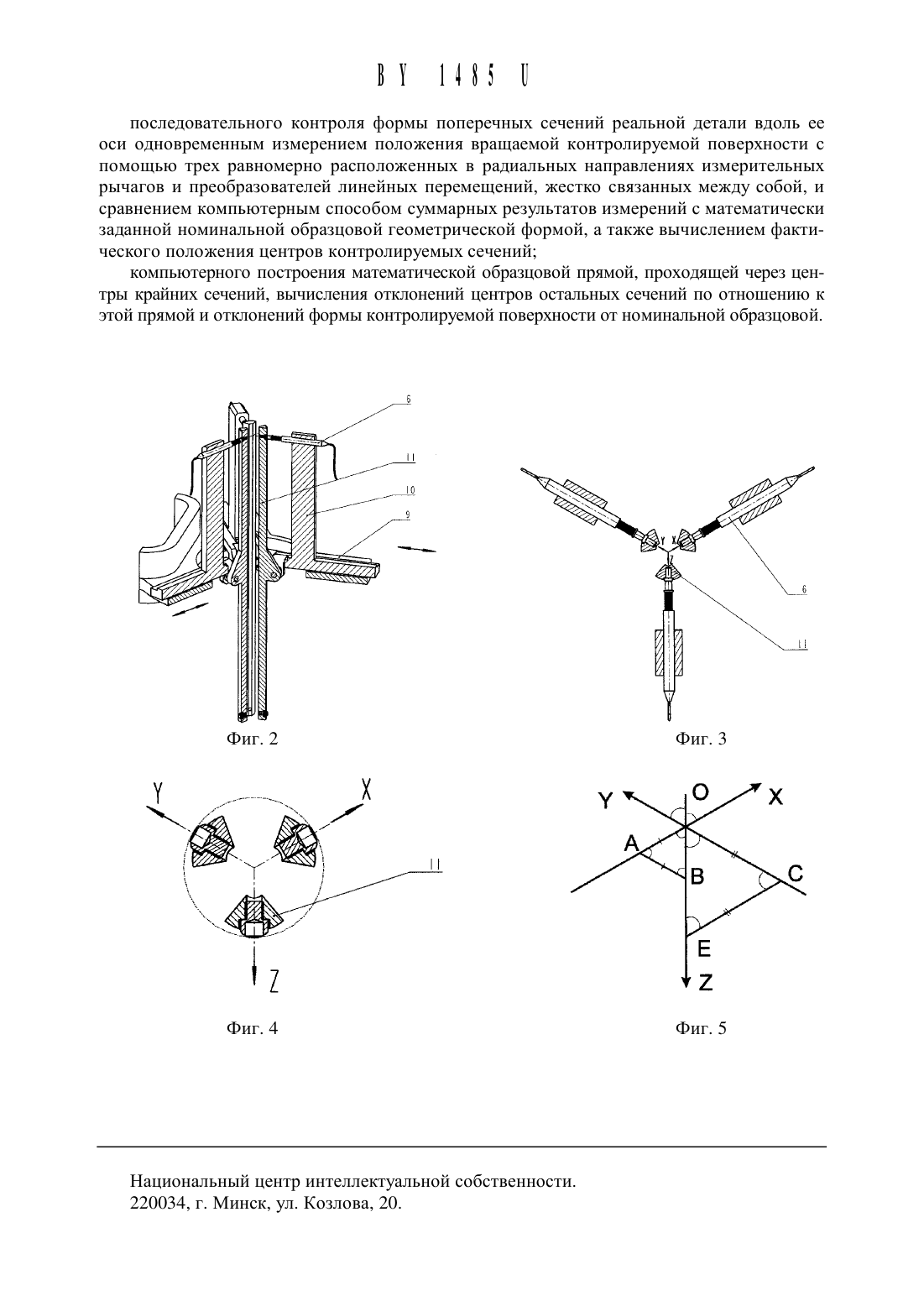
ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ к ПАТЕНТУНАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОИ СОБСТВЕННОСТИУСТРОЙСТВО КОНТРОЛЯ ГЕОМЕТРИЧЕСКОЙ ФОРМЫ ВНУТРЕННИХ цИЛИНдРИчЕСкИх И СЛОжНОпРОФИЛьНых ПОВЕРХНОСТЕИреспубликанское унитарное предприятие КБТЭМ-ОМО (ВУ)(72) Авторы Зайцев Валентин Андреевич Зуев Владимир Павлович Плавинский Валерий Антонович Дедков Андрей Иванович (ВУ)(73) Патентообладатель Научно-производст венное республиканское унитарное предприятие КБТЭМ-ОМО (ВУ)Устройство контроля геометрической формы внутренних цилиндрических и сложнопрофильных поверхностей, содержащее основание с направляющими, каретку, установленную на направляющих с возможностью перемещения вдоль продольной оси контроля, механизм Центрирования, крепления и вращения контролируемой детали, установленный на основании, блок обработки сигналов и три преобразователя линейных перемещений, подключенных к блоку обработки сигналов, отличающееся тем, что оно содержит трехканальный измерительный рычажный механизм, закрепленный на каретке, состоящий из держателя с установленными нанем тремя расположенными равномерно по кругу ползунами с возможностью их радиального перемещения и фиксации, несущими три преобразователя линейных перемещений и три измерительных рычага, одним плечом взаимодействующих с преобразователями линейных перемещений, а вторым - с контролируемой поверхностью, причем плоскости перемещений и качания измерительных рычагов совмещены с осью механизма центрирования, крепления и вращения контролируемой детали, и компьютерную систему суммирования показаний преобразователей и вычисления отклонений формы контролируемой поверхности от расчетной образцовой, электрически связанную с блоком обработки сигналов.Полезная модель относится к контрольно-измерительной технике и может быть использована для контроля отклонений от номинальной геометрической формы внутренних цилиндрических и сложнопрофильных поверхностей.Ближайшим прототипом является устройство для измерения геометрической формы номинально круглой цилиндрической детали 1.Устройство содержит основание с направляющими, каретку, установленную на направляющих с возможностью перемещения вдоль продольной оси контроля, накладной кругломер с самоустанавливающимися опорами, закрепленный на каретке, механизм центрирования,крепления и вращения контролируемой детали, три преобразователя (датчика) линейных перемещений и блок обработки сигналов, электрически связанный с преобразователями.Недостатком такой конструкции является отсутствие возможности контроля внутренних цилиндрических и сложнопрофильных поверхностей, а также ограниченная точность измерения из-за того, что в качестве измерительной базы используют саму измеряемую поверхность.Кроме того, в процессе измерений не известны точное положение центра контролируемой геометрической формы и непрямолинейность продольных перемещений датчиков,что также приводит к искажению результатов контроля.Задача, на рещение которой направлено заявляемое устройство, состоит в обеспечении возможности контроля с повыщенной точностью внутренних цилиндрических и сложнопрофильных поверхностей.Поставленная задача достигается тем, что устройство контроля геометрической формы внутренних цилиндрических и сложнопрофильных поверхностей содержит основание с направляющими, каретку, установленную на направляющих с возможностью перемещения вдоль продольной оси контроля, механизм центрирования, крепления и вращения контролируемой детали, установленный на основании, блок обработки сигналов, три преобразователя линейных перемещений, подключенных к блоку обработки сигналов, электрически связанному с компьютерной системой суммирования показаний преобразователей и вычисления отклонений формы контролируемой поверхности от расчетной образцовой, и трехканальный измерительный рычажный механизм, закрепленный на каретке, состоящий из держателя с установленными на нем тремя расположенными равномерно по кругу ползунами с возможностью их радиального перемещения и фиксации, несущими три преобразователя линейных перемещений и три измерительных рычага, одним плечом взаимодействующих с преобразователями линейных перемещений, а вторым - с контролируемой поверхностью, причем плоскости перемещений и качания измерительных рычагов совмещены с осью механизма центрирования, крепления и вращения контролируемой детали.При этом образцовой линией для контроля геометрической формы поверхности вдоль ее оси является математическая прямая, проведенная через центры внутренних сечений,измеренных по краям контролируемой поверхности.Суть устройства поясняется чертежами, гдена фиг. 1 приведена конструкция устройства для контроля внутренних цилиндрических И сложнопрофильнь 1 х поверхностейна фиг. 2 приведена конструкция трехканального измерительного рычажного механизма в разрезена фиг. 3 приведено сечение в плоскости контакта измерительных рычагов с преобразователями линейных перемещенийна фиг. 4 приведено сечение в плоскости контакта измерительных рычагов с контролируемой поверхностью (показана пунктиром)на фиг. 5 приведена принципиальная геометрическая схема трехканального контроля.Устройство контроля геометрической формы внутренних цилиндрических и сложнопрофильнь 1 х поверхностей содержит основание 1 (фиг. 1) с направляющими 2, каретку 3, установленную на направляющих 2 с возможностью перемещения вдоль продольной оси контроля,механизм 4 центрирования, крепления и вращения контролируемой детали, установленный на основании 1, блок обработки сигналов 5, три преобразователя линейных перемещений 6, подключенных к блоку обработки сигналов 5, электрически связанному с компьютерной системой 7 суммирования показаний преобразователей и вычисления отклонений формы контролируемой поверхности от расчетной образцовой, и трехканальный измерительный рычажный механизм 8 (фиг. 2), закрепленный на каретке 3, состоящий из держателя 9 с установленными на нем тремя расположенными равномерно по кругу ползунами 10 с возможностью их радиального перемещения и фиксации, несущими три преобразователя линейных перемещений 6 и три измерительных рычага 11, одним плечом взаимодействующих с преобразователями линейных перемещений 6, а вторым - с контролируемой поверхностью (показана пунктиром), причем плоскости перемещений и качания измерительных рычагов 11 совмещены с осью механизма 4 центрирования, крепления и вращения контролируемой детали.Устройство контроля геометрической формы внутренних цилиндрических и сложнопрофильнь 1 х поверхностей работает следующим образом.После установки контролируемой детали (на чертеже показана условно пунктиром) на механизм 4 ее центрирования, крепления и вращения (фиг. 1) ползуны 10 на механизме 8(фиг. 2) передвигаются и фиксируются в держателе 9 так, чтобы при упоре одного плеча каждого измерительного рычага 11 в контролируемую поверхность (фиг. 3) создавался некоторый натяг при упоре второго плеча рычага 11 в преобразователь линейных перемещений 6(фиг. 4), при этом для упрощения последующих вычислений соотнощение плеч рычагов 11 принимается 11, а показания преобразователей 6 электронным образом устанавливаются в нулевое исходное состояние с индикацией на пульте блока обработки сигналов 5.Центрирование контролируемой поверхности относительно оси ее вращения может быть произведено как автоматически, например, с помощью трехкулачкового патрона, так и последовательным смещением детали, достигая минимальных отклонений показаний одного из преобразователей линейных перемещений 6.Если предположить, что контролируемая цилиндрическая поверхность идеальна и ее центр совпадает с осью вращения, то при идеальном вращении этой поверхности относительно трех измерительных рычагов 11 и преобразователей 6 их показания изменяться не будут и сумма показаний будет равна нулю.В реальной ситуации предполагаемый центр контролируемой поверхности не совпадает с осью ее вращения, положение которой также имеет нерегулярные случайные отклонения. Кроме того, направляющие 2, по которым перемещается каретка 3, непрямолинейнь 1 и непараллельны продольной оси контролируемой поверхности.При повороте контролируемой детали на некоторый угол показания преобразователей 6 изменятся (фиг. 3) по отнощению к исходным нулевым, пропорционально смещениям плеч измерительных рычагов 11 относительно контролируемой поверхности (фиг. 4). Тогда допустим, что (фиг. 5)отрезок ОА соответствует показанию преобразователя 6 по оси Х (АХ) И является стороной равностороннего (имеющего три равных угла) треугольника ОАВ, в котором сторона ОВ соответствует показанию преобразователя по оси 2 (А 21)отрезок ОС соответствует показанию преобразователя 6 по оси У (АУ) и является стороной равностороннего треугольника ОСЕ, в котором сторона ОЕ соответствует показанию преобразователя по оси 2 (А 22).При условии, что показание преобразователя 6 имеет знак плюс, если его измерительный щток входит в преобразователь, и имеет знак минус, если измерительный щток выходит из него, а начальной (базовой) измерительной осью является координата 2, в приведенном примере соотношения между показаниями трех преобразователей 6 вь 1 разятся (в абсолютных значениях)А 21 АХ А 22 АУ А 21 А 22 А 2, тогда с учетом знаков показаний преобразователей по координатам Х, У, 2 их сумма выразитсяА 21 А 22-АХ-АУОилиА 2-АХ-АУО,т.е. алгебраическая сумма показаний преобразователей будет равна нулю.В общем случае равенство примет вид (в зависимости от знаков показаний преобразователей)Электрические сигналы от преобразователей линейных перемещений 6 формируются блоком обработки сигналов 5 в виде, удобном для работы компьютерной системы 7.С целью повышения достоверности результатов контроля при последующем вращении контролируемой поверхности, за базовые измерительные оси последовательно принимаются координаты Х и У, после чего результаты измерений усредняются и суммируются.Для этого целесообразно выполнить три оборота контролируемой детали. Полученные данные сравниваются с математически заданной образцовой геометрической формой контролируемой поверхности, воспроизведенной компьютерной системой 7, которая анализирует отклонение от нуля суммы показаний преобразователей 6 в данном положении по углу поворота контролируемой детали. При этом вычисляются координаты центра контролируемого сечения (например, как центр тяжести фигуры).Далее, на экране дисплея компьютерной системы 7 строится фактическая кривая контролируемой поверхности, наложенная на графическую математическую номинальную геометрическую форму, что позволяет визуально определить имеющиеся отклонения. При необходимости эта информация документируется в графическом или цифровом виде.При контроле поверхности сложнопрофильной формы, заведомо отличающейся от цилиндрической, алгоритм контроля аналогичен.При необходимости контроля отклонений продольной оси цилиндрической поверхности от номинальной производят компьютерное построение математической образцовой прямой, проходящей через центры крайних сечений, и вычисления отклонений центров остальных сечений по отнощению к этой прямой.Построение отклонений контролируемой цилиндрической формы от номинальной(конусность, овальность, кривизна и т.п.) также производят на основе контроля поверхности по сечениям вдоль ее оси.Данное конструктивное рещение полезной модели не ограничивается лищь вертикальной компоновкой. Оно может быть реализовано как в горизонтальном, так и в других исполнениях. Также не исключено применение оптических, пневматических и электромагнитных бесконтактных преобразователей линейных перемещений.Предлагаемая конструкция полезной модели не только повыщает точность контроля, но и снижает точностные требования к элементам конструкции и их взаимному расположению.Заявленное техническое рещение обеспечивает повыщение точности контроля отклонений от номинальных геометрических форм внутренних цилиндрических и сложнопрофильнь 1 х поверхностей за счет
МПК / Метки
МПК: G01B 5/20
Метки: внутренних, цилиндрических, контроля, поверхностей, сложнопрофильных, устройство, геометрической, формы
Код ссылки
<a href="https://by.patents.su/5-u1485-ustrojjstvo-kontrolya-geometricheskojj-formy-vnutrennih-cilindricheskih-i-slozhnoprofilnyh-poverhnostejj.html" rel="bookmark" title="База патентов Беларуси">Устройство контроля геометрической формы внутренних цилиндрических и сложнопрофильных поверхностей</a>
Устройство контроля геометрической формы наружных цилиндрических и сложнопрофильных поверхностей

Номер патента: U 1368
Опубликовано: 30.06.2004
Авторы: Зуев Владимир Павлович, Дедков Андрей Иванович, Плавинский Валерий Антонович, Зайцев Валентин Андреевич
МПК: G01B 5/20
Метки: цилиндрических, наружных, контроля, поверхностей, сложнопрофильных, геометрической, устройство, формы
Текст:
...совпадающей с осью механизма 4 крепления и вращения контролируемой детали, и блок обработки сигналов 7, подключенный к преобразователям линейных перемещений 6 и компьютерной системе 8 суммирования показаний преобразователей 6 и вычисления отклонений формы контролируемой поверхности от расчетной образцовой. Устройство контроля геометрической формы наружных цилиндрических и сложнопрофильных поверхностей работает следующим образом. После...
Устройство для электроконтактной наплавки внутренних цилиндрических поверхностей
Номер патента: U 1432
Опубликовано: 30.06.2004
Авторы: Кашицин Леонид Павлович, Сосновский Алексей Валерьевич, Витязь Александр Александрович, Гафо Юрий Натанович, Широкий Игорь Владимирович
МПК: B23K 11/06
Метки: внутренних, поверхностей, электроконтактной, цилиндрических, наплавки, устройство
Текст:
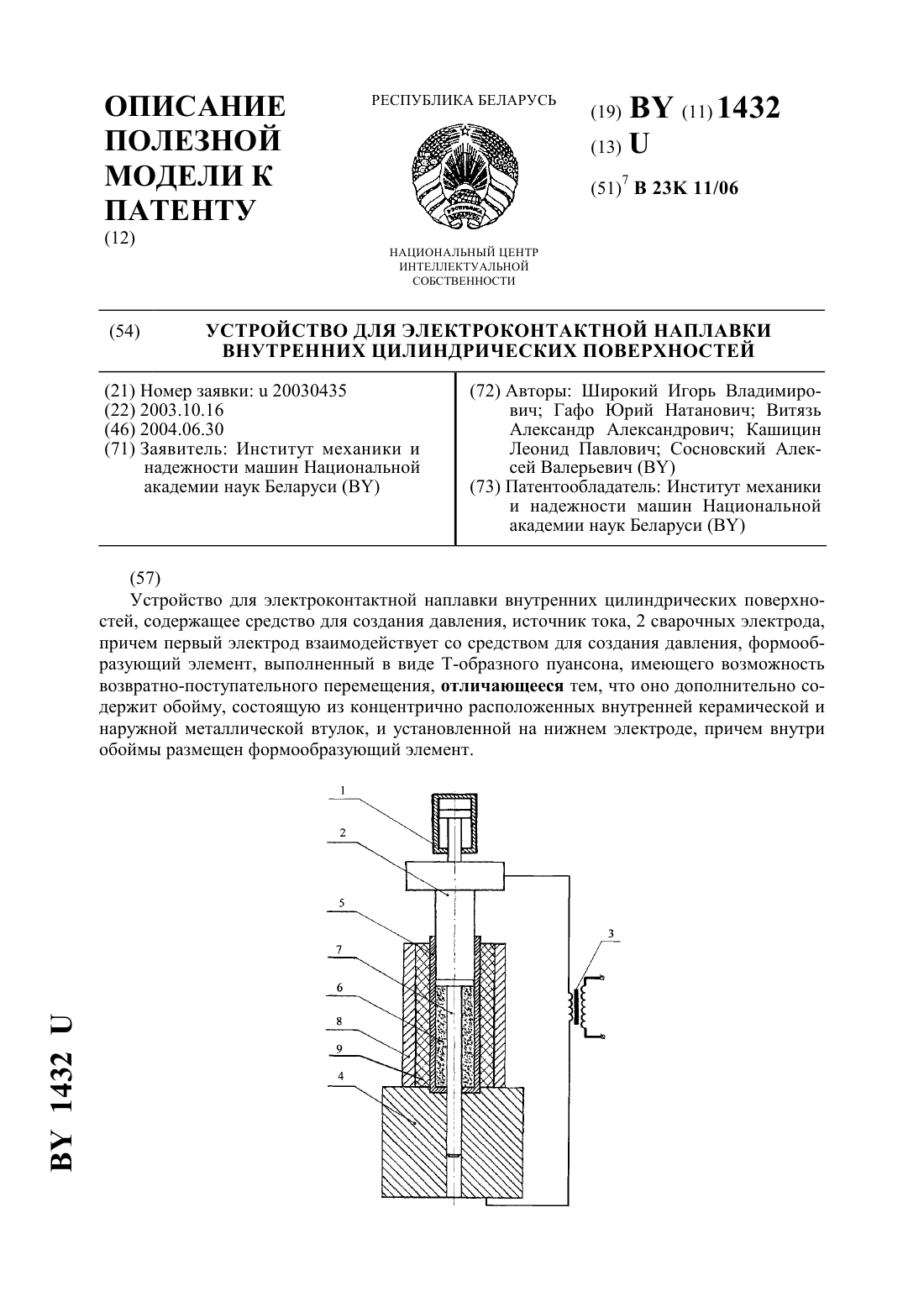
...стенки к высоте которых менее 1/4, так как возникающее при уплотнении порошка радиальное усилие приводит к деформации заготовки в радиальном направлении. Задачей предлагаемой полезной модели является исключить деформацию заготовки в радиальном направлении в процессе наплавки покрытий на внутреннюю цилиндрическую поверхность деталей с диаметром меньше 20 мм, соотношение толщины стенки к высоте которых менее 1/4. Решение поставленной...
Устройство для электроконтактной наплавки внутренних цилиндрических поверхностей деталей
Номер патента: U 943
Опубликовано: 30.09.2003
Авторы: Широкий Игорь Владимирович, Кашицин Леонид Павлович, Гафо Юрий Натанович, Сосновский Алексей Валерьевич
МПК: B23K 11/06
Метки: поверхностей, электроконтактной, деталей, устройство, цилиндрических, внутренних, наплавки
Текст:
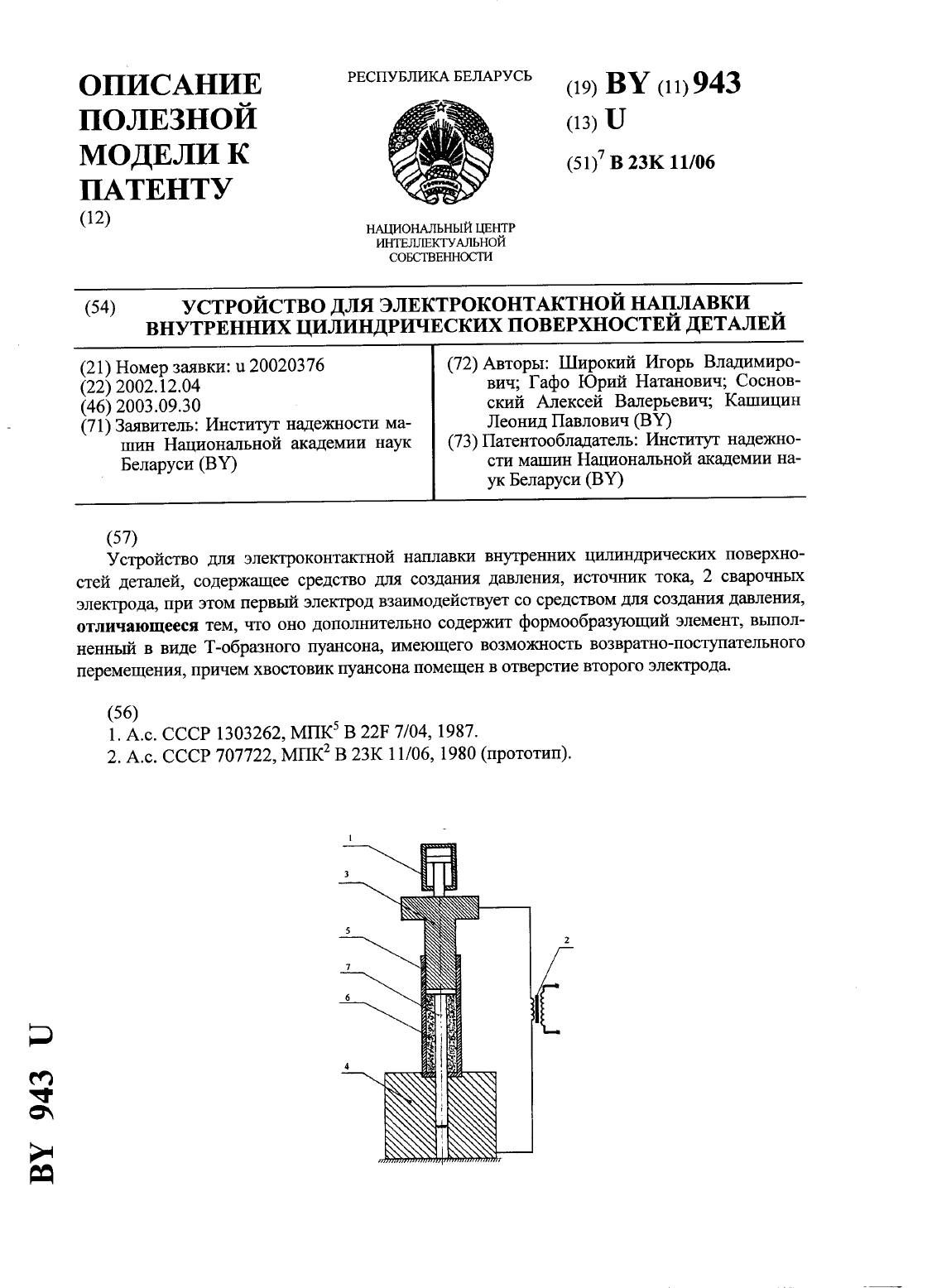
...средство для создания давления, источник тока, 2 сварочных электрода, при этом первый электрод взаимодействует со средством для создания давления, отличающееся тем, что оно дополнительно содержит формообразующий элемент, выполненный в виде Т - образного пуансона,имеющего возможность возвратно-поступательного перемещения. Причем хвостовик пуансона помещен в отверстие второго электрода. На чертеже представлена схема предлагаемого...
Инструмент для пневмовибродинамической обработки внутренних цилиндрических поверхностей
Номер патента: U 966
Опубликовано: 30.09.2003
Авторы: Ящук Олег Викторович, Ткачев Александр Владимирович, Камчицкая Ирина Дмитриевна, Титова Елена Валерьевна, Минаков Анатолий Петрович
МПК: B24B 39/02
Метки: обработки, инструмент, цилиндрических, поверхностей, внутренних, пневмовибродинамической
Текст:
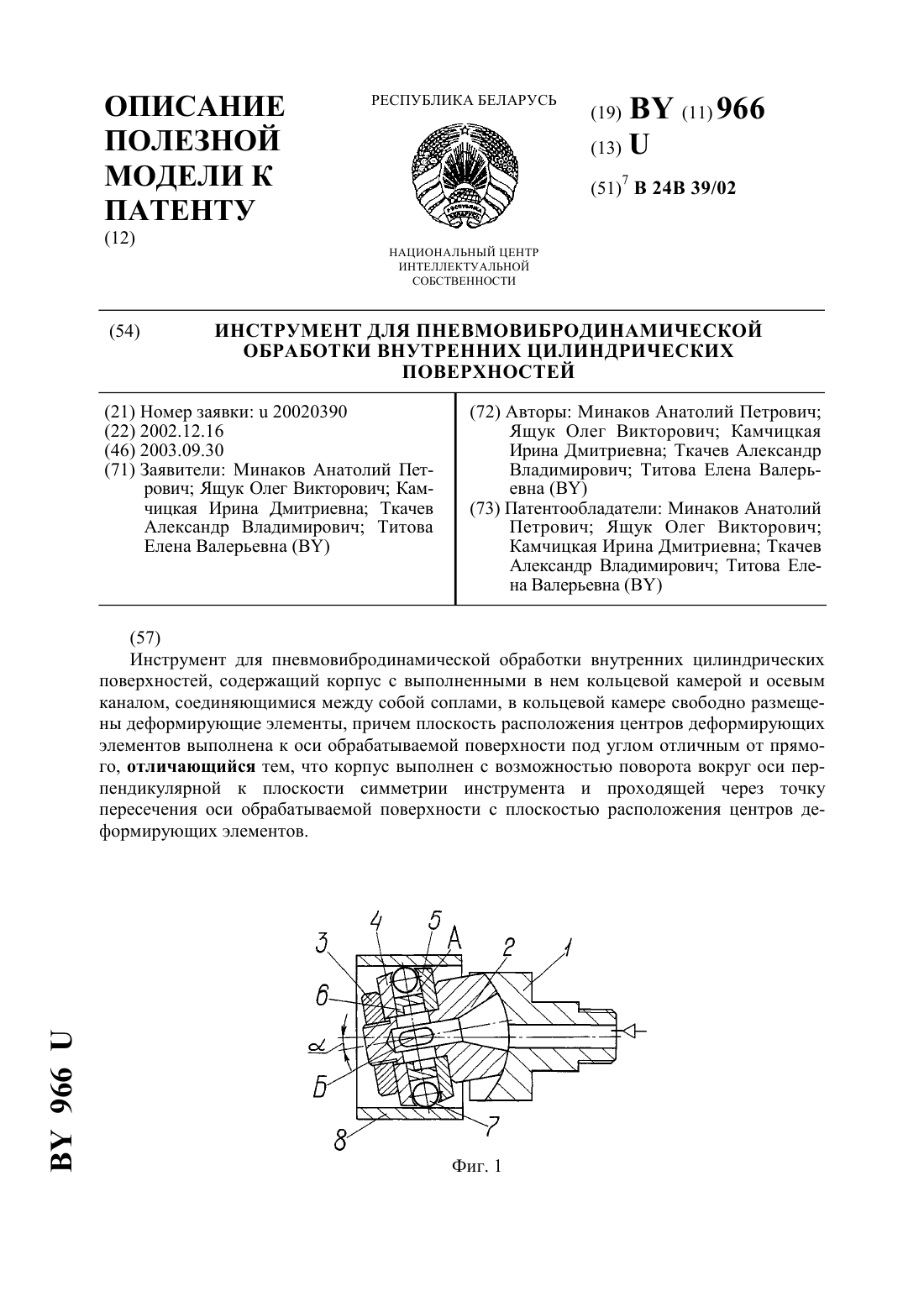
...деформирующие элементы, причем плоскость расположения центров деформирующих элементов выполнена к оси обрабатываемой поверхности под углом отличным от прямого 2. Рассматриваемый инструмент позволяет наносить на обрабатываемую поверхность микрорельеф в виде сетки ромбовидной формы, но не позволяет регулировать угол наклона плоскости расположения центров деформирующих элементов, что ограничивает его технологические возможности. Задачей...
Устройство для очистки внутренних поверхностей систем отопления
Номер патента: U 465
Опубликовано: 30.03.2002
Автор: Никифоров Анатолий Павлович
МПК: B08B 9/02
Метки: поверхностей, очистки, систем, отопления, устройство, внутренних
Текст:
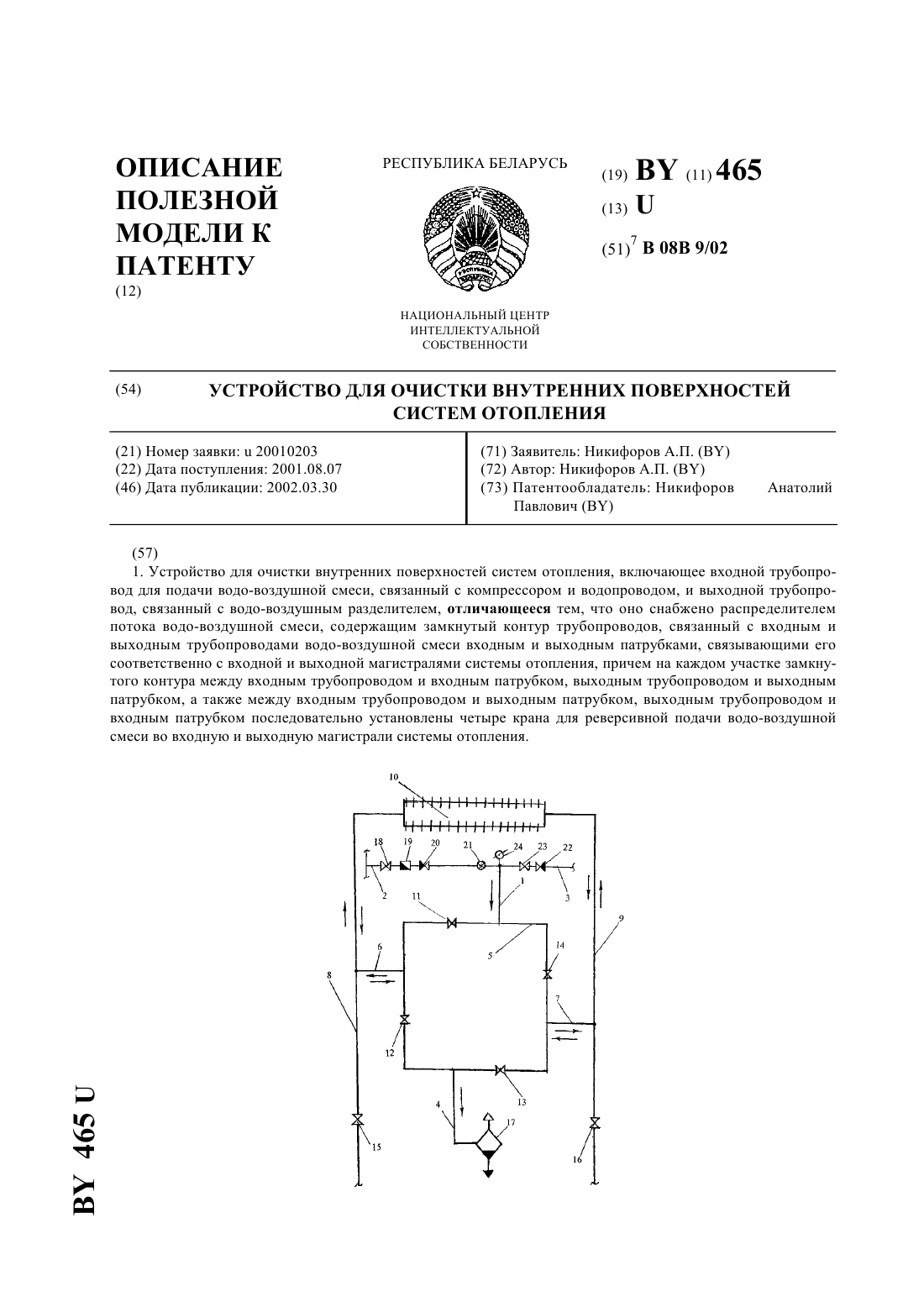
...связывающими его соответственно с входной и выходной магистралями системы отопления, причем на каждом участке замкнутого контура между входным трубопроводом и входным патрубком, выходным трубопроводом и выходным патрубком, а также между входным трубопроводом и выходным патрубком, выходным трубопроводом и входным патрубком последовательно установлены четыре крана для осуществления реверсивной подачи водо-воздушной смеси во входную или выходную...
Предыдущий патент: Универсальный распределитель минеральных материалов
Следующий патент: Гидрообъемная трансмиссия самоходной машины
Случайный патент: Георешетка одноосноориентированная