Автоматический регулятор грузовых режимов торможения транспортного средства
Номер патента: U 1090
Опубликовано: 30.12.2003
Авторы: Захожий Александр Иванович, Тамков Николай Леонтьевич, Галай Эдуард Иванович, Рудов Павел Корнеевич
Текст
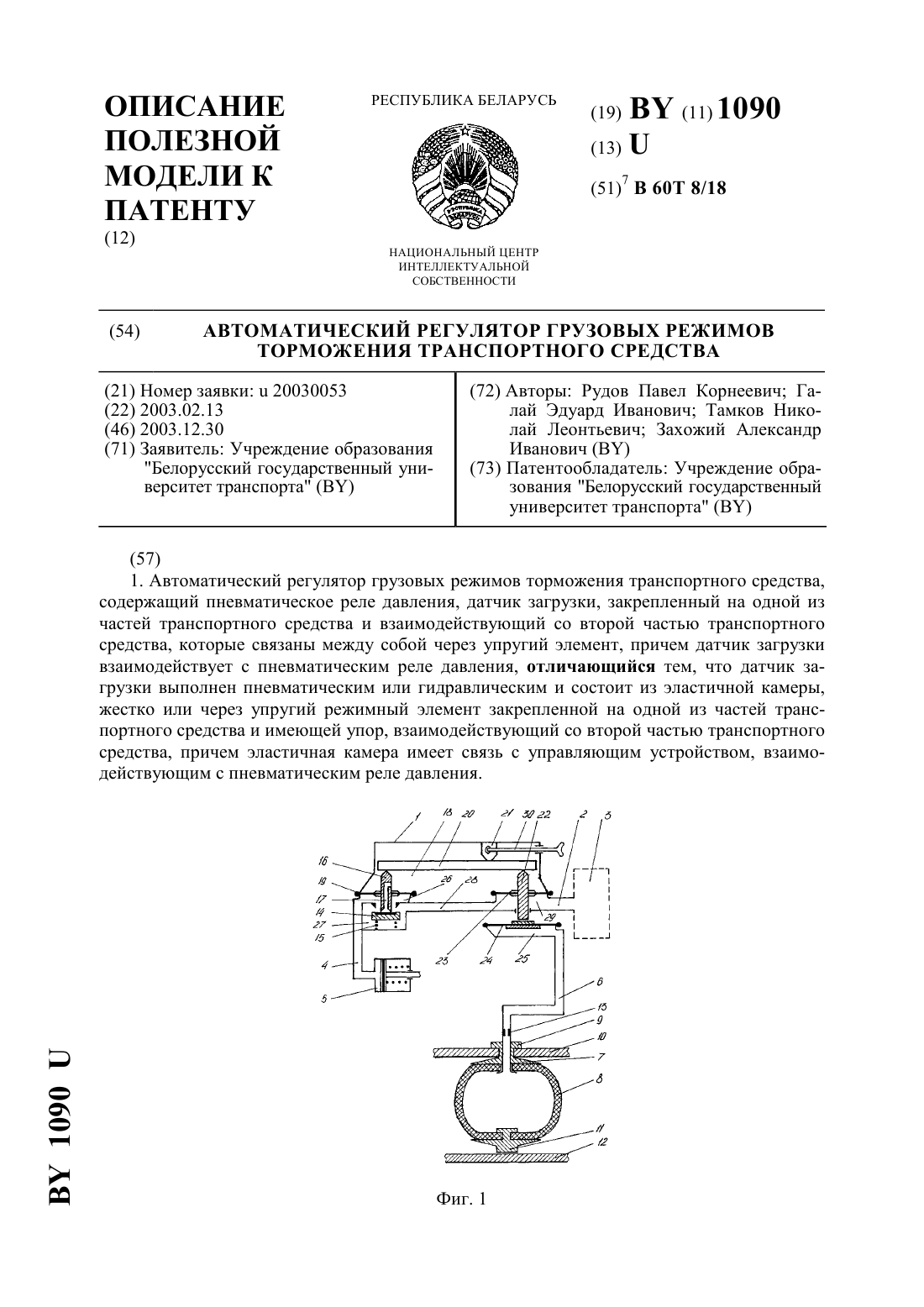
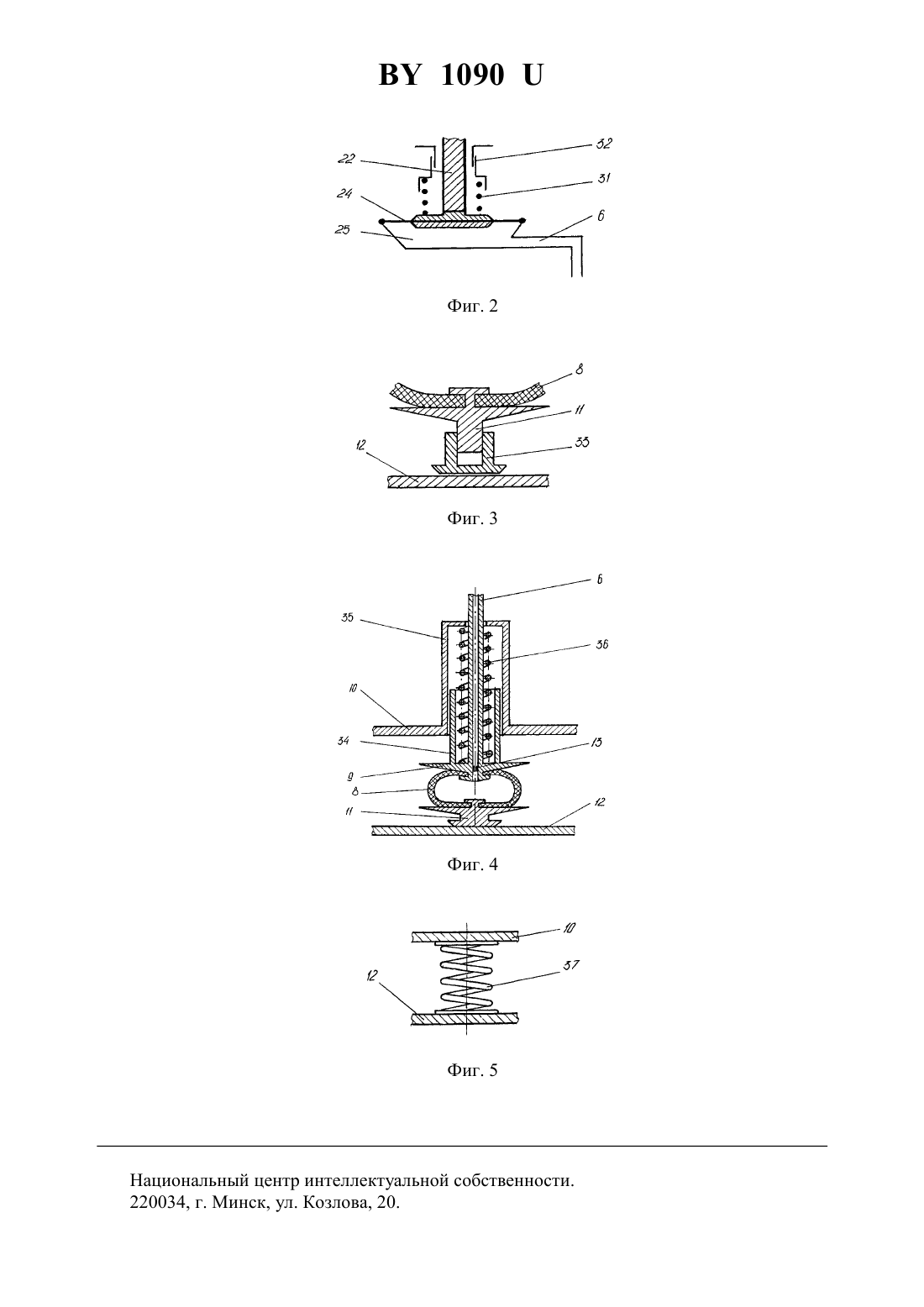
НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР ГРУЗОВЫХ РЕЖИМОВ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА(71) Заявитель Учреждение образования Белорусский государственный университет транспорта(72) Авторы Рудов Павел Корнеевич Галай Эдуард Иванович Тамков Николай Леонтьевич Захожий Александр Иванович(73) Патентообладатель Учреждение образования Белорусский государственный университет транспорта(57) 1. Автоматический регулятор грузовых режимов торможения транспортного средства,содержащий пневматическое реле давления, датчик загрузки, закрепленный на одной из частей транспортного средства и взаимодействующий со второй частью транспортного средства, которые связаны между собой через упругий элемент, причем датчик загрузки взаимодействует с пневматическим реле давления, отличающийся тем, что датчик загрузки выполнен пневматическим или гидравлическим и состоит из эластичной камеры,жестко или через упругий режимный элемент закрепленной на одной из частей транспортного средства и имеющей упор, взаимодействующий со второй частью транспортного средства, причем эластичная камера имеет связь с управляющим устройством, взаимодействующим с пневматическим реле давления. 10902. Регулятор по п. 1, отличающийся тем, что пневматическое реле давления имеет рычаг, центр поворота которого определяется положением сухаря, установленного с возможностью ручной регулировки положения вдоль поверхности рычага. 3. Регулятор по п. 1 или 2, отличающийся тем, что управляющее устройство выполнено из подвижной перегородки, имеющей возможность взаимодействия с рычагом пневматического реле давления и образующей с корпусом управляющего устройства полость,трубопроводом связанную с эластичной камерой. 4. Регулятор по п. 3, отличающийся тем, что подвижная перегородка подпружинена относительно регулируемой опоры. 5. Регулятор по п. 1, отличающийся тем, что эластичная камера взаимодействует с частью транспортного средства, на которой она установлена, через режимную пружину. 6. Регулятор по п. 1, отличающийся тем, что эластичная камера и управляющее устройство связаны между собой через дроссель с калиброванным отверстием. 7. Регулятор по п. 1, отличающийся тем, что упор выполнен с регулировочным стаканом или винтом, обеспечивающим возможность регулирования длины упора.(56) 1. Галай Э.И., Лукашик В.Г., Рыжик Е.Э. Автоматический регулятор грузовых режимов торможения //Афцыйны бюлетэнь. Вынаходствы, карысныя мадэл, прамысловыя зоры. - 1999. -1. - Заявка 970365 (прототип). Полезная модель относится к железнодорожному транспорту и касается тормозной техники подвижного состава. Известен автоматический регулятор грузовых режимов торможения, содержащий закрепленные на подрессоренной части вагона датчик загрузки и пневматическое реле, в корпусе которого расположен подпружиненный демпферный поршень, на штоке которого закреплен сухарь, взаимодействующий с рычагом пневматического реле. Шток демпферного поршня связан с одним концом гибкого элемента, содержащего пружину и вторым концом шарнирно соединенного с неподрессоренной частью подвижного состава . Недостатком данного регулятора является то, что сухарь в зависимости от загрузки подвижного состава перемещается вдоль рычага пневматического реле и взаимодействует с его различными участками, что приводит к их износу и, как следствие, снижению надежности регулятора. Кроме того, датчик загрузки с демпферным поршнем имеет сложную конструкцию. Также в регуляторе отсутствует возможность простой регулировки при использовании на различных типах подвижного состава, отличающихся массой тары и требующих разных тормозных нажатий при порожнем состоянии. Задачей предлагаемого технического решения является повышение надежности и упрощение конструкции автоматического регулятора грузовых режимов торможения. Поставленная задача достигается тем, что автоматический регулятор грузовых режимов торможения транспортного средства, содержащий пневматическое реле давления,снабжен датчиком загрузки, выполненным пневматическим или гидравлическим, причем датчик загрузки состоит из эластичной камеры, которая жестко или через упругий режимный элемент закреплена на одной из частей транспортного средства и имеет упор, взаимодействующий со второй частью транспортного средства, связанной с первой частью через упругий элемент. Эластичная камера трубопроводом сообщена с управляющим устройством, взаимодействующим с пневматическим реле давления. Реле давления выполнено с рычагом, центр поворота которого определяется положением сухаря, установленного с возможностью взаимодействия со средней частью рычага, причем сухарь имеет возможность ручной регулировки своего положения вдоль поверхности рычага с целью исполь 2 1090 зования регулятора на различных типах подвижного состава, которые требуют различных тормозных нажатий в порожнем состоянии. Управляющее устройство выполнено из подвижной перегородки, образующей с корпусом управляющего устройства полость и имеющей возможность посредством штока взаимодействовать с рычагом пневматического реле давления. Подвижная перегородка подпружинена относительно регулируемой опоры. Эластичная камера связана с одной из частей транспортного средства через упругий режимный элемент. С целью демпфирования колебаний давления управляющее устройство связано с эластичной камерой через дроссель с калиброванным отверстием. С целью регулировки предварительного давления в эластичной камере, упор выполнен с регулирующим стаканом или винтом, обеспечивающим возможность регулирования длины упора. На фиг. 1 показана общая схема автоматического регулятора грузовых режимов торможения транспортного средства. На фиг. 2 приведена схема управляющего устройства,включающего подвижную перегородку, подпружиненную относительно регулируемой опоры. На фиг. 3 показан регулируемой упор эластичной камеры. На фиг. 4 изображен второй вариант исполнения пневматического или гидравлического эластичного элемента,взаимодействующего с частью транспортного средства, на которой она установлена, через режимную пружину. На фиг. 5 изображен упругий элемент, связывающий две части транспортного средства. Автоматический регулятор грузовых режимов торможения транспортного средства состоит из пневматического реле давления 1 и датчика загрузки 7, выполненного из пневматической или гидравлической эластичной камеры 8, верхняя часть 9 которой закреплена на подрессоренной части 10 транспортного средства. Упор 11 эластичной камеры 8 взаимодействует с неподрессоренной частью 12 транспортного средства. Каналом 6 датчик загрузки 7 связан с пневматическим реле давления 1. Пневматическое реле давления 1 каналом 2 связано с источником сжатого воздуха (воздухораспределителем) 3, а каналом 4 с силовым механизмом (тормозным цилиндром) 5. Пневматическое реле давления 1 выполнено из питательного клапана 14, подпружиненного пружиной 15 и взаимодействующего со штоком 16, имеющим канал 17, связанный с атмосферной полостью 18. Шток 16 жестко связан с подвижной перегородкой 19 и взаимодействует с рычагом 20. Средней частью рычаг 20 взаимодействует с сухарем 21, а вторым концом - со штоком 22, жестко связанным с подвижной перегородкой 23. Шток 22 взаимодействует с подвижной перегородкой 24 управляющего устройства, имеющего полость 25. Полость 26, ограниченная подвижной перегородкой 19, сообщена с полостью 27, которая в свою очередь сообщена каналом 28 с полостью 29, ограниченной подвижной перегородкой 23. Сухарь 21, являющийся точкой опоры рычага 20, при помощи винта 30 имеет возможность перемещения вдоль рычага 20. Упор 11 эластичной камеры 8 выполнен с регулировочным стаканом 33. Верхняя часть 9 эластичной камеры 8 выполнена со стаканом 34, а к подрессоренной части 10 транспортного средства прикреплен стакан 35. Стаканы 34 и 35 соединены телескопически и внутри них размещена режимная пружина 36. Стакан 35 выполнен с возможностью регулирования усилия режимной пружины 36. Подвижная перегородка 24 управляющего устройства подпружинена пружиной 31, предварительная затяжка которой регулируется с помощью подвижного упора 32. Части 10 и 12 транспортного средства связаны между собой упругим элементом 37. Автоматический регулятор грузовых режимов торможения транспортного средства работает следующим образом. При изменении загрузки транспортного средства расстояние между его подрессоренной частью 10 и неподрессоренной частью 12 изменяется, и,соответственно, изменяется давление газа или жидкости в эластичной камере 8 и сообщенной с ней трубопроводом 6 полости 25 управляющего устройства. При отпущенном состоянии тормоза под действием давления в полости 25 подвижная перегородка 24 приподнята вверх. Усилие, действующее на подвижную перегородку 24, передается через 3 1090 шток 22 на рычаг 20, который поворачивается против часовой стрелки. Центр поворота рычага 20 определяется положением сухаря 21. Далее усилие передается через шток 16 на питательный клапан 14, и пружина 15 сжимается. Клапан 14 находится в открытом положении. Тормозной цилиндр 15 по каналу 4, через открытый питательный клапан 14, по каналам 28 и 2 и далее через воздухораспределитель 3 сообщен с атмосферой. При торможении воздух от воздухораспределителя 3 по каналам 2 и 28, через открытый питательный клапан 14 и далее по каналу 4 поступает в тормозной цилиндр 5. Давление,создаваемое воздухораспределителем 3, действует на подвижную перегородку 23, и развиваемое на ней усилие передается на шток 22. Суммарное усилие, передаваемое на шток 22 от подвижных перегородок 23 и 24, стремится повернуть рычаг 20 против часовой стрелки относительно сухаря 21. Однако по мере повышения давления в тормозном цилиндре 5 и сообщенной с ним полостью 26 подвижная перегородка 19 со штоком 16 перемещается вверх, поворачивая рычаг 20 по часовой стрелке, до тех пор, пока питательный клапан 14 не закроется под действием пружины 15. Таким образом, величина давления в тормозном цилиндре 5 устанавливается в зависимости от положения сухаря 21, величины давления, создаваемого воздухораспределителем 23, и величины давления, создаваемого датчиком загрузки 7. При увеличении загрузки расстояние между подрессоренной частью 10 и неподрессоренной частью 12 транспортного средства уменьшается, и давление в эластичной камере 8, а также в полости 25 повышается. В результате более высокое давление устанавливается и в тормозном цилиндре 5. При колебаниях транспортного средства на рессорном подвешивании 37 в процессе движения давление в эластичной камере 8 периодически изменяется в соответствии с частотой колебаний. Однако дроссель 13 с калиброванным отверстием, установленный в трубопроводе 6, препятствует быстрому перетеканию газа или жидкости в полость 25, в которой сохраняется практически постоянное давление. При утечках воздуха из тормозного цилиндра 5 давление в полости 26 также снижается. Рычаг 20 поворачивается против часовой стрелки и питательный клапан 14 открывается для восполнения утечек. При отпуске тормоза воздух из полости 29 по каналу 2 и далее через воздухораспределитель 3 выходит в атмосферу. Условие равновесия рычага 20 нарушается, и он поворачивается по часовой стрелке. При этом шток 16 под действием давления на подвижную перегородку 19 поднимается вверх и воздух из тормозного цилиндра 5 по каналу 17 в штоке 16 выходит в атмосферную полость 18. В конце отпуска при низком давлении воздуха в полости 16 шток 20 повернется против часовой стрелки под действием давления воздуха в полости 25, канал 17 закроется и откроется питательный клапан 14. Оставшийся в тормозном цилиндре 5 воздух будет выходить в атмосферу через воздухораспределитель 3. Регулировка автоматического регулятора грузовых режимов торможения при его использовании на различных типах подвижного состава, требующих различных тормозных нажатий в порожнем состоянии, производится с помощью винта 30, которым устанавливают необходимое положение сухаря 21, и тем самым изменяют давление в тормозном цилиндре 5. Упором 32 и пружиной 31 регулируют положение подвижной перегородки 24 управляющего устройства. Необходимое положение эластичной камеры 8 на транспортном средстве и предварительное давление внутри нее при порожнем состоянии транспортного средства устанавливается регулировочным стаканом 33, позволяющим изменять длину упора 11. Преимущественно при использовании гидравлического датчика загрузки в силу несжимаемости жидкости эластичная камера 8 устанавливается на подрессоренной части транспортного средства и взаимодействует с ней через режимную пружину 36. Стаканом 35 регулируется предварительная затяжка режимной пружины 36 и тем самым давление внутри эластичной камеры. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B60T 8/18
Метки: транспортного, автоматический, режимов, регулятор, грузовых, средства, торможения
Код ссылки
<a href="https://by.patents.su/5-u1090-avtomaticheskijj-regulyator-gruzovyh-rezhimov-tormozheniya-transportnogo-sredstva.html" rel="bookmark" title="База патентов Беларуси">Автоматический регулятор грузовых режимов торможения транспортного средства</a>
Автоматический регулятор грузовых режимов торможения

Номер патента: 4769
Опубликовано: 30.12.2002
Авторы: Лукашик Валерий Григорьевич, Рыжик Елена Эдуардовна, Галай Эдуард Иванович
МПК: B60T 8/18
Метки: режимов, торможения, грузовых, автоматический, регулятор
Текст:
...пневматическое реле и датчик загрузки. В корпусе датчика расположен демпферный поршень со штоком с закрепленным на нем сухарем, взаимодействующим с рычагом пневмореле. Шток установлен с возможностью взаимодействия с гибким элементом, содержащим пружину. Один конец гибкого элемента связан со штоком, а другой конец шарнирно соединен с неподрессоренной частью вагона. Такие конструктивные особенности авторежима позволяют упростить конструкцию...
Автоматический регулятор грузовых режимов торможения

Номер патента: 5300
Опубликовано: 30.06.2003
Авторы: Тамков Николай Леонтьевич, Рудов Павел Корнеевич, Галай Елена Эдуардовна, Галай Эдуард Иванович
МПК: B60T 8/18
Метки: торможения, режимов, грузовых, автоматический, регулятор
Текст:
...на отдельном элементе, подпружиненном с двух сторон вдоль подвижной штанги. Упругие элементы обеспечивают возможность перемещения штанги относительно сухаря в тормозном режиме и установку сухаря в исходное положение относительно подвижной штанги в отпускном режиме. Между подвижной штангой и корпусом измерительного устройства устанавливаются элементы, например цилиндрические ролики, заменяющие трение скольжения трением качения. Для исключения...
Автоматический регулятор грузового режима
Номер патента: 1820
Опубликовано: 30.12.1997
Автор: Тамков Николай Леонтьевич
МПК: B60T 8/18
Метки: режима, регулятор, автоматический, грузового
Текст:
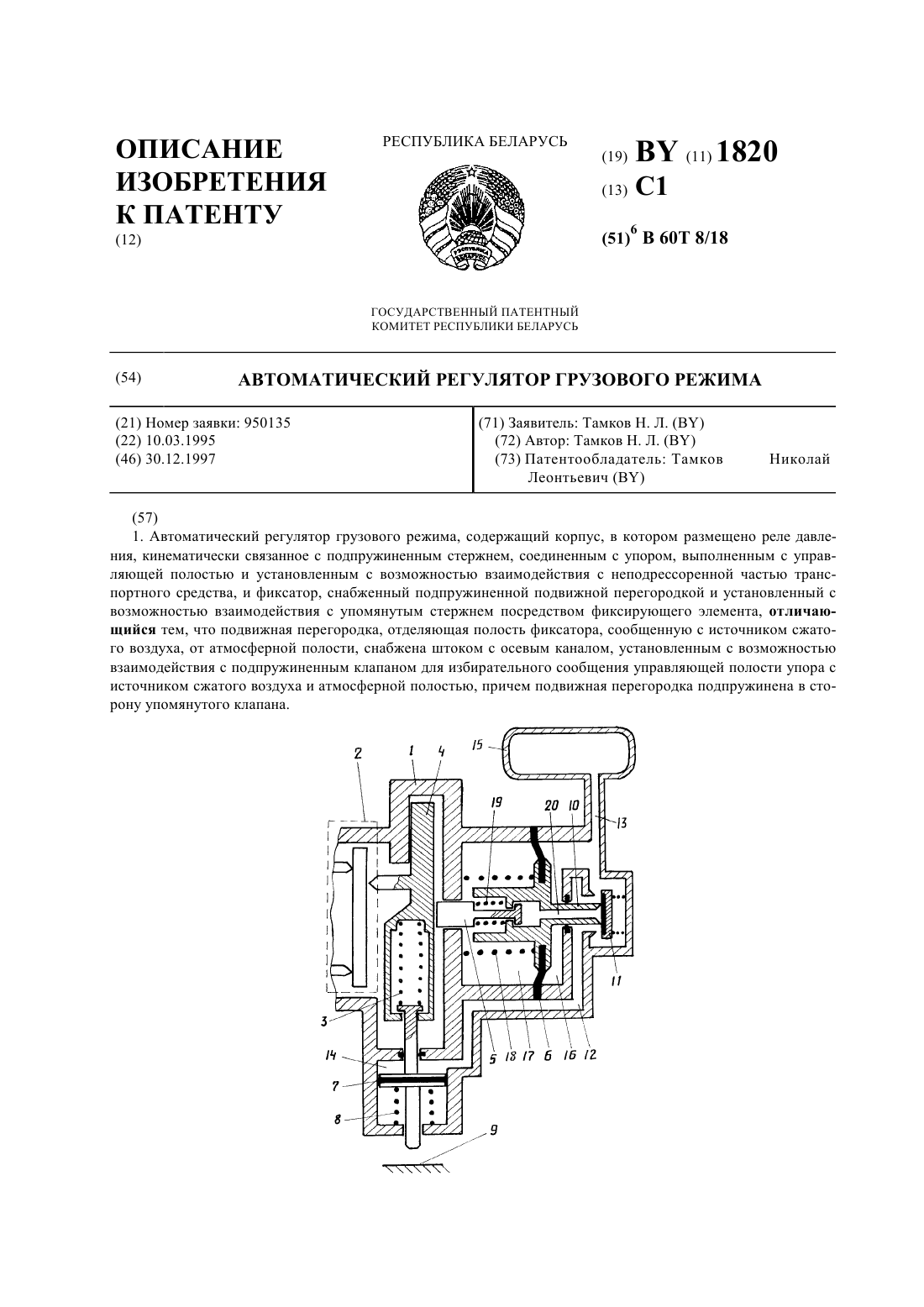
...сжатого воздуха, от атмосферной полости, снабжена штоком с осевым каналом,установленным с возможностью взаимодействия с подпружиненным клапаном для избирательного сообщения управляющей полости упора с источником сжатого воздуха и атмосферной полостью, причем подвижная перегородка подпружинена в сторону упомянутого клапана, а фиксирующий элемент подпружинен относительно подвижной перегородки в сторону стержня. Источником сжатого воздуха может...
Регулятор пневматической подвески транспортного средства
Номер патента: 3474
Опубликовано: 30.09.2000
Авторы: Червяк Геннадий Петрович, Рудович Александр Олегович, Павлович Александр Эдуардович
МПК: B60G 17/00
Метки: регулятор, средства, транспортного, пневматической, подвески
Текст:
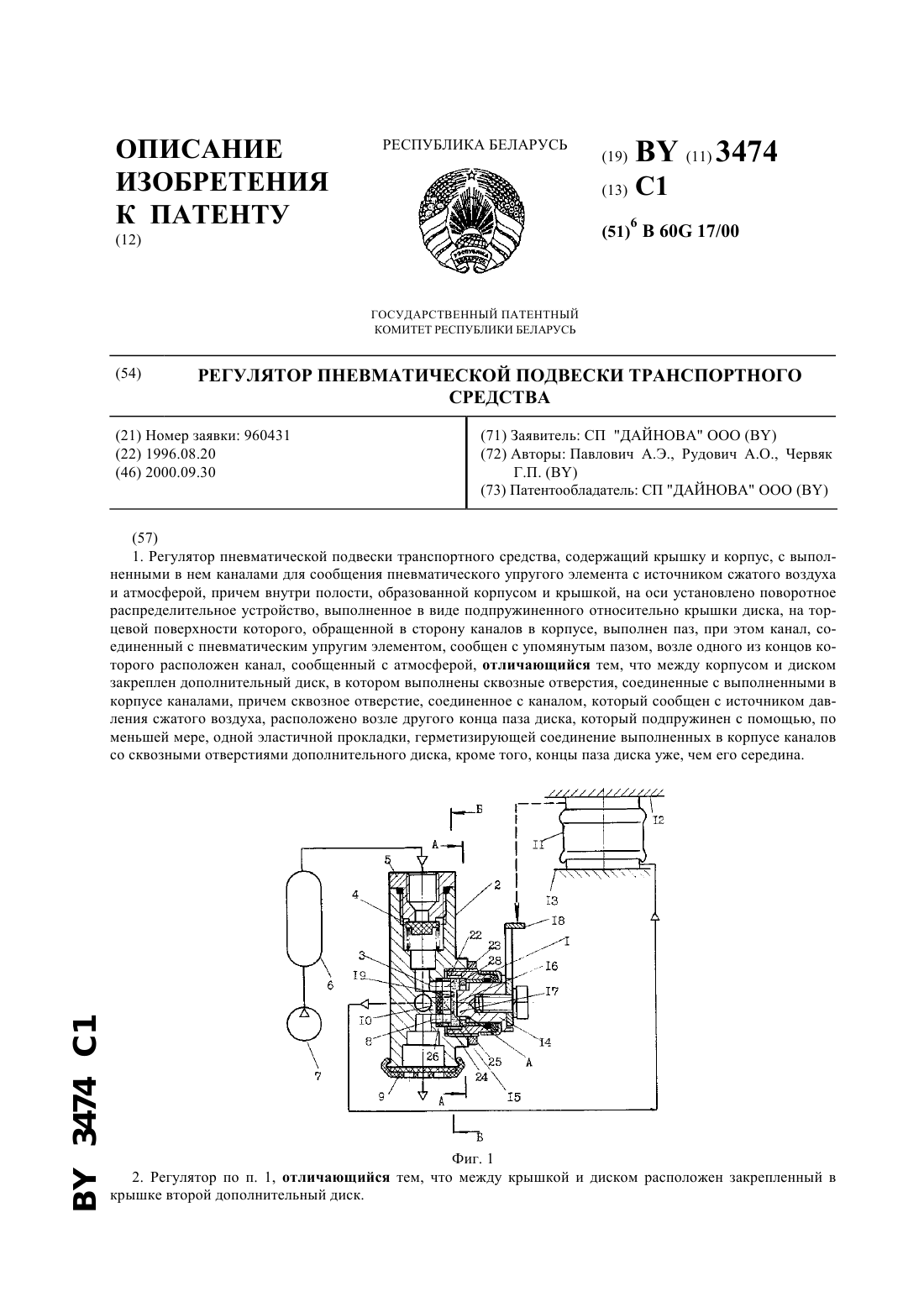
...Данное отличие значительно упрощает конструкцию регулятора, повышает его надежность и долговечность работы. Выполнение диска, подпружиненного с помощью, как минимум, одной эластичной прокладки, герметизирующей соединение выполненных в корпусе каналов со сквозными отверстиями дополнительного диска,также направлено на упрощение конструкции регулятора. В сравнении с прототипом в заявляемом регуляторе отсутствует необходимость в установке пружины...
Регулятор тормоза транспортного средства
Номер патента: 950
Опубликовано: 15.12.1995
Автор: Боталенко Андрей Андреевич
МПК: F16D 65/52
Метки: регулятор, средства, транспортного, тормоза
Текст:
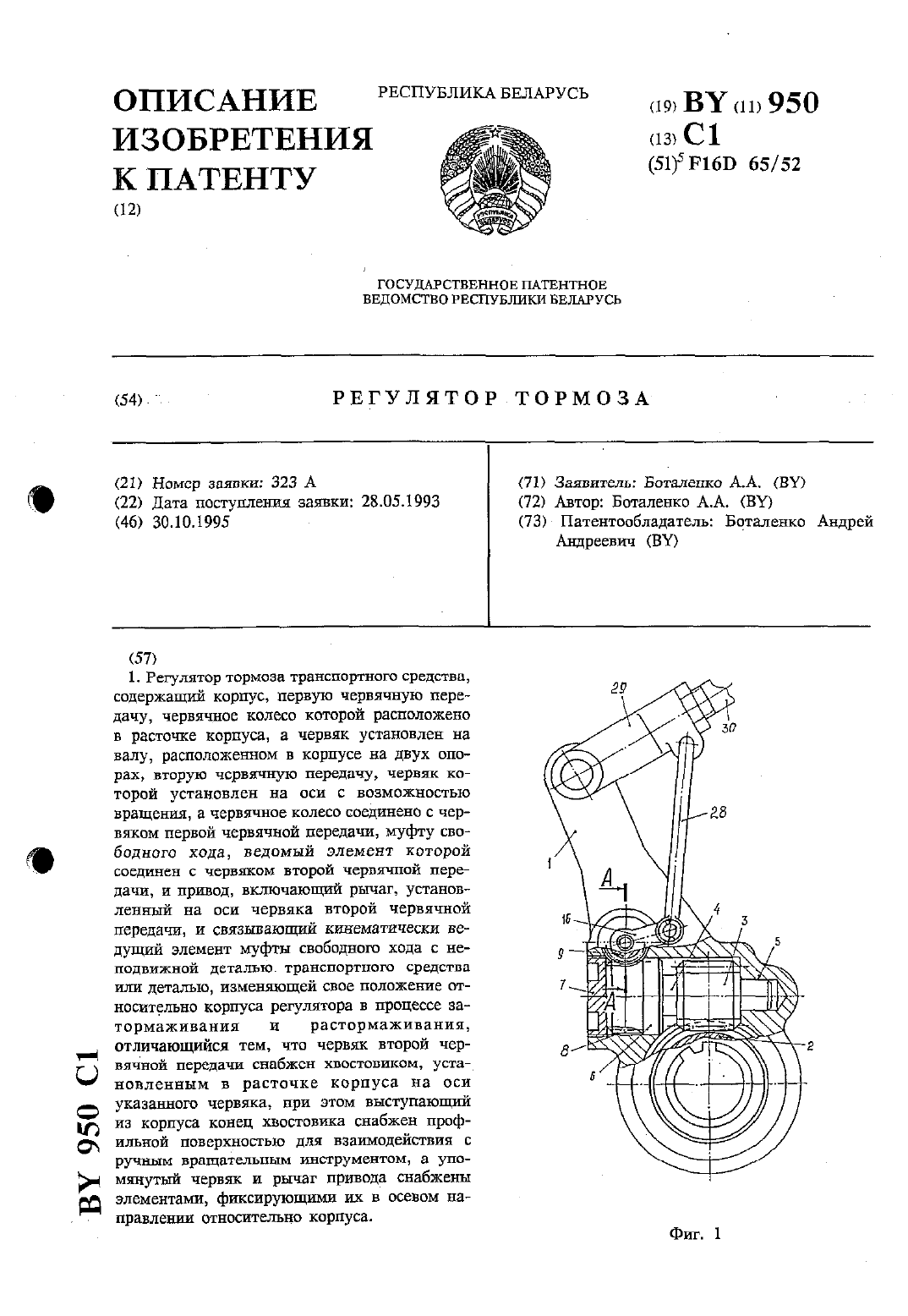
...хода, требующиедля их изготовления слонннжтехннологических процессов п специального оборудования. Кроме того, при ручной регулировке требуется частичная разборна.регу лятора, что способствует проникновению внутрь регулятора грнзн и снижает его надежность. р гы Ч чиввестен также регулятор тормоза 7 трансйортного средства, содержащий К 9 РПУО.П 9 рВУЮчервяяную передачу. червяЩое.колесо т . , р 7на валу, расположенном в корпусе на двух...
Предыдущий патент: Экранный глушитель
Следующий патент: Бутылка
Случайный патент: Устройство для исследования процесса горения в двигателе внутреннего сгорания