Управляемое балансирующее устройство
Номер патента: 1859
Опубликовано: 30.12.1997
Авторы: Домашевич Владимир Викторович, Туравинов Владимир Павлович, Еленский Виктор Апаллинарович, Лобкова Майя Петровна, Кулешов Василий Васильевич, Дривень Павел Иванович
Текст
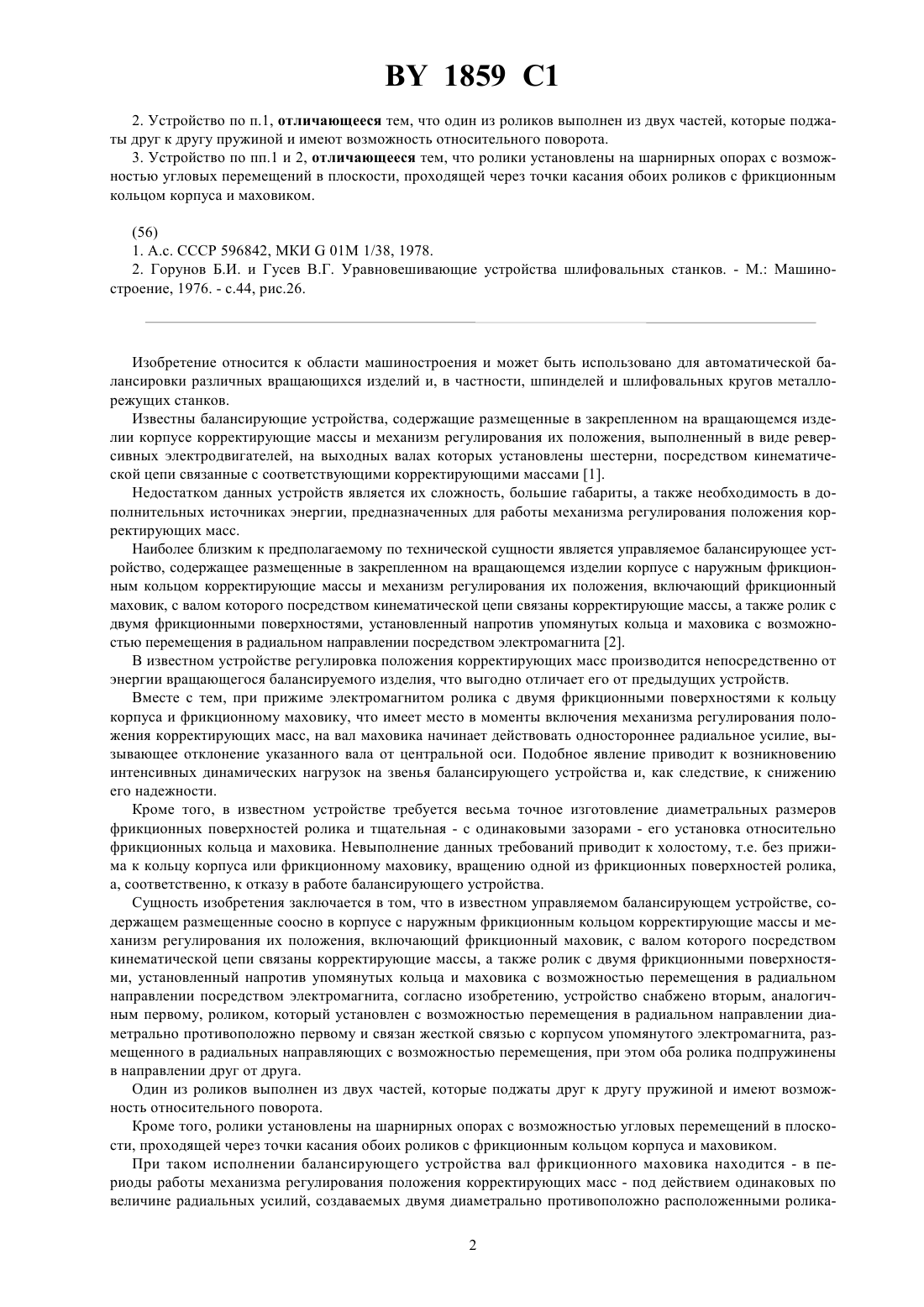
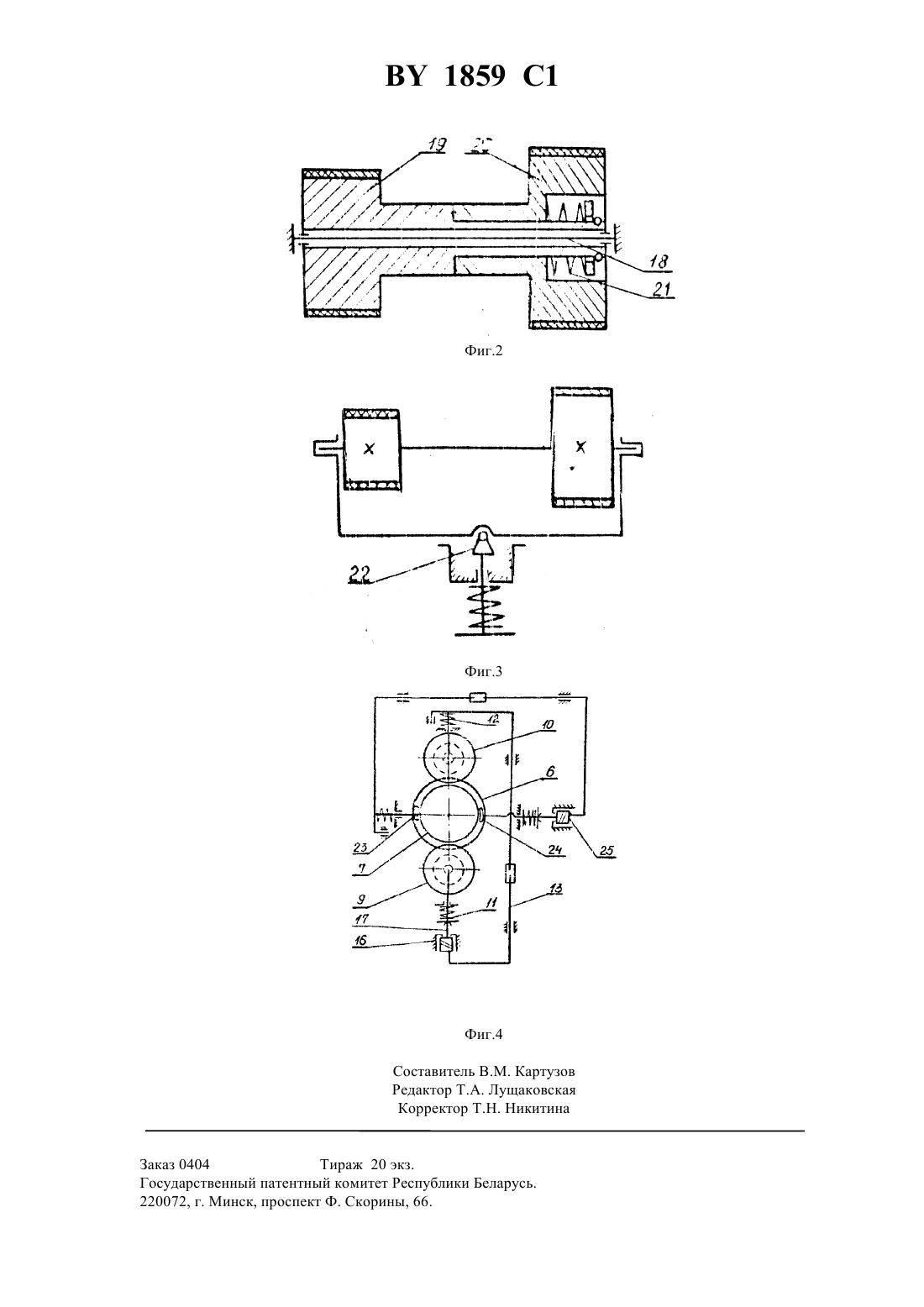
ГОСУДАРСТВЕННЫЙ ПАТЕНТНЫЙ КОМИТЕТ РЕСПУБЛИКИ БЕЛАРУСЬ(71) Заявитель Институт надежности машин Академии наук Беларуси(73) Патентообладатель Институт надежности машин Академии наук Беларуси(57) 1. Управляемое балансирующее устройство, содержащее размещенные соосно в корпусе с наружным фрикционным кольцом корректирующие массы и механизм регулирования их положения, включающий фрикционный маховик, с валом которого посредством кинематической цепи связаны корректирующие массы, а также ролик с двумя фрикционными поверхностями, установленный напротив упомянутых кольца и маховика с возможностью перемещения в радиальном направлении посредством электромагнита, отличающееся тем, что оно снабжено вторым, аналогичным первому, роликом, который установлен с возможностью перемещения в радиальном направлении диаметрально противоположно первому и связан жесткой связью с корпусом упомянутого электромагнита, размещенного в радиальных направляющих с возможностью перемещения, при этом оба ролика подпружинены в направлении друг от друга. 1859 1 2. Устройство по п.1, отличающееся тем, что один из роликов выполнен из двух частей, которые поджаты друг к другу пружиной и имеют возможность относительного поворота. 3. Устройство по пп.1 и 2, отличающееся тем, что ролики установлены на шарнирных опорах с возможностью угловых перемещений в плоскости, проходящей через точки касания обоих роликов с фрикционным кольцом корпуса и маховиком.(56) 1. А.с. СССР 596842, МКИ 01 1/38, 1978. 2. Горунов Б.И. и Гусев В.Г. Уравновешивающие устройства шлифовальных станков. - М. Машиностроение, 1976. - с.44, рис.26. Изобретение относится к области машиностроения и может быть использовано для автоматической балансировки различных вращающихся изделий и, в частности, шпинделей и шлифовальных кругов металлорежущих станков. Известны балансирующие устройства, содержащие размещенные в закрепленном на вращающемся изделии корпусе корректирующие массы и механизм регулирования их положения, выполненный в виде реверсивных электродвигателей, на выходных валах которых установлены шестерни, посредством кинематической цепи связанные с соответствующими корректирующими массами 1. Недостатком данных устройств является их сложность, большие габариты, а также необходимость в дополнительных источниках энергии, предназначенных для работы механизма регулирования положения корректирующих масс. Наиболее близким к предполагаемому по технической сущности является управляемое балансирующее устройство, содержащее размещенные в закрепленном на вращающемся изделии корпусе с наружным фрикционным кольцом корректирующие массы и механизм регулирования их положения, включающий фрикционный маховик, с валом которого посредством кинематической цепи связаны корректирующие массы, а также ролик с двумя фрикционными поверхностями, установленный напротив упомянутых кольца и маховика с возможностью перемещения в радиальном направлении посредством электромагнита 2. В известном устройстве регулировка положения корректирующих масс производится непосредственно от энергии вращающегося балансируемого изделия, что выгодно отличает его от предыдущих устройств. Вместе с тем, при прижиме электромагнитом ролика с двумя фрикционными поверхностями к кольцу корпуса и фрикционному маховику, что имеет место в моменты включения механизма регулирования положения корректирующих масс, на вал маховика начинает действовать одностороннее радиальное усилие, вызывающее отклонение указанного вала от центральной оси. Подобное явление приводит к возникновению интенсивных динамических нагрузок на звенья балансирующего устройства и, как следствие, к снижению его надежности. Кроме того, в известном устройстве требуется весьма точное изготовление диаметральных размеров фрикционных поверхностей ролика и тщательная - с одинаковыми зазорами - его установка относительно фрикционных кольца и маховика. Невыполнение данных требований приводит к холостому, т.е. без прижима к кольцу корпуса или фрикционному маховику, вращению одной из фрикционных поверхностей ролика,а, соответственно, к отказу в работе балансирующего устройства. Сущность изобретения заключается в том, что в известном управляемом балансирующем устройстве, содержащем размещенные соосно в корпусе с наружным фрикционным кольцом корректирующие массы и механизм регулирования их положения, включающий фрикционный маховик, с валом которого посредством кинематической цепи связаны корректирующие массы, а также ролик с двумя фрикционными поверхностями, установленный напротив упомянутых кольца и маховика с возможностью перемещения в радиальном направлении посредством электромагнита, согласно изобретению, устройство снабжено вторым, аналогичным первому, роликом, который установлен с возможностью перемещения в радиальном направлении диаметрально противоположно первому и связан жесткой связью с корпусом упомянутого электромагнита, размещенного в радиальных направляющих с возможностью перемещения, при этом оба ролика подпружинены в направлении друг от друга. Один из роликов выполнен из двух частей, которые поджаты друг к другу пружиной и имеют возможность относительного поворота. Кроме того, ролики установлены на шарнирных опорах с возможностью угловых перемещений в плоскости, проходящей через точки касания обоих роликов с фрикционным кольцом корпуса и маховиком. При таком исполнении балансирующего устройства вал фрикционного маховика находится - в периоды работы механизма регулирования положения корректирующих масс - под действием одинаковых по величине радиальных усилий, создаваемых двумя диаметрально противоположно расположенными ролика 2 1859 1 ми, которые имеют возможность угловых перемещений в плоскости, проходящей через точки касания обоих роликов с фрикционным кольцом корпуса и маховиком. Это исключает перекосы указанного вала относительно центральной оси и предупреждает возникновение вызываемых подобными перекосами динамических нагрузок на звенья балансирующего устройства, снижающих надежность последнего. Выполнение при этом одного из роликов составным устраняет последствия возможной разницы в диаметрах противоположно расположенных фрикционных поверхностей данных роликов, которая, в случае выполнения их цельными, приводит к проскальзыванию указанных фрикционных поверхностей по кольцу корпуса или фрикционному маховику и вызывает быстрый износ соприкасающихся поверхностей. Т.е., при наличии подобной разницы, одна часть составного ролика, преодолевая натяг, создаваемый пружиной, проворачивается относительно его другой части, передавая без проскальзываний вращение с кольца корпуса на вал фрикционного маховика. Установка роликов на шарнирных опорах обеспечивает, в свою очередь, гарантированный прижим фрикционных поверхностей данных роликов к кольцу корпуса и фрикционному маховику и тем самым исключает отказы в работе балансирующего устройства, вызываемые ошибками как в изготовлении роликов, так и в их предварительной установке. На фиг.1 приведена принципиальная кинематическая схема управляемого балансирующего устройства,на фиг.2 - эскиз составного ролика, на фиг.3 - схема установки роликов на шарнирных опорах, на фиг.4 - кинематическая схема регулирования положения корректирующих масс с устройством реверсирования их движения. Управляемое балансирующее устройство (УБУ) содержит (см. фиг.1) корректирующие массы, выполненные, например, в виде двух установленных на автономные оси секторов 1 и 2 (конструктивное исполнение корректирующих масс не заявляется и может быть различным), помещенных в закрепленном, например,на планшайбе 3 шлифовального круга 4 корпусе 5 с наружным фрикционным кольцом 6. Кроме того, УБУ включает в свой состав механизм регулирования положения корректирующих масс, содержащий фрикционный маховик 7, вал 8 которого посредством кинематической цепи связан, например, через червячноцилиндрическую передачу (конструктивное исполнение кинематической цепи также может быть разным) с секторами 1 и 2, и два диаметрально противоположно расположенных ролика с двумя фрикционными поверхностями 9 и 10. Последние установлены своими фрикционными поверхностями напротив кольца 6 корпуса 5, а также фрикционного маховика 7, и отжимается от них в радиальном направлении пружинами, соответственно, 11 и 12 ( для отжима роликов могут использоваться как витые, так и плоские пружины). Ролик 10 связан жесткой тягой 13, которая имеет возможность регулировки по длине, с установленным в радиальных направляющих 14 корпусом 15 электромагнита 16, толкатель 17 которого взаимодействует при включении данного электромагнита с роликом 9. Один из роликов, например 10, выполнен составным (см. фиг.2) и содержит посаженные на одну ось 18 две части 19 и 20, поджатые одна к другой с определенным по величине усилием пружиной 21. При этом оба ролика, т.е. 9 и 10, установлены (см. фиг.3) на шарнирных опорах, например 22, обеспечивающих угловые перемещения указанных роликов в плоскости, проходящей через точки касания их фрикционных поверхностей с фрикционными кольцом и маховиком (см. фиг.1). Механизм регулирования положения корректирующих масс может дополнительно содержать и устройство, обеспечивающее реверс движения данных масс. Это устройство повышает быстродействие УБУ и полностью выполняется по схеме включения в работу роликов (см.фиг.4). Отличие заключается только в том, что вместо роликов устройство содержит две диаметрально противоположно расположенные тормозные накладки 23 и 24, которые устанавливаются напротив фрикционного маховика 7 и управляются отдельным электромагнитом 25. Работает управляемое балансирующее устройство следующим образом. При допустимой величине дисбаланса шпиндельного узла станка (это - его шпиндель, шлифовальный круг 4 с планшайбой 3, а также УБУ), электромагниты 16 и 25 отключены и фрикционный маховик 7 свободно вращается со всеми деталями УБУ, находящимися в корпусе 5, на частоте вращения шлифовального круга 4. В случае превышения величины дисбаланса допустимого значения, что регистрируется установленным на шлифовальной бабке вибродатчиком (на чертеже не указаны), блок управления работой УБУ ( также на чертеже не указан) подает сигнал, например, на электромагнит 16 (очередность и порядок включения электромагнитов 16 и 25 определяются заложенным в блоке управления алгоритмом, который не заявляется и может быть разным), толкатель 17 которого, преодолевая усилие пружины 11, прижимает к кольцу 6 корпуса 5 и фрикционному маховику 7 ролик 9, фрикционные поверхности которого - за счет установки ролика 9 на шарнирной опоре, например 22 - самоустанавливаются по фрикционным поверхностям указанных кольца 6 и маховика 7. Так как ход толкателя 17 электромагнита 16 превышает предварительно установленные зазоры ( за счет регулировки длины жесткой тяги 13) между фрикционными поверхностями роликов 9 и 10, а также кольцом 6 и маховиком 7, и усилие данного толкателя 17 превышает усилия пружин 11 и 12, корпус 15 электромагнита 16 начинает перемещаться (от центральной оси УБУ) в направляющих 14 и через тягу 13 при 3 1859 1 жимает к кольцу 6 и маховику 7 ролик 10, фрикционные поверхности которого также самоустанавливаются по фрикционным поверхностям последних. В результате такого прижатия, которое и обеспечивает передачу вращения с кольца 6 корпуса 5 на фрикционный маховик 7, вал 8 последнего находится под действием противоположно направленных радиальных усилий от фрикционных поверхностей роликов 9 и 10, что исключает его перекосы относительно центральной оси и не вызывает снижающих надежность УБУ нежелательных динамических нагрузок на его звенья. При этом, в случае возможной разницы в диаметрах противоположно расположенных фрикционных поверхностей указанных роликов 9 и 10, которая может привести к их проскальзыванию по кольцу 6 или маховику 7 и, тем самым вызвать быстрый износ соприкасающихся фрикционных поверхностей, одна составная часть ролика 10, например 20, преодолевает натяг пружины 21 и начинает проворачиваться относительно другой части 19 ролика. Окружные скорости противоположно расположенных фрикционных поверхностей роликов 9 и 10 при этом выравниваются и передача вращения с кольца 6 корпуса 5 на маховик 7 происходит без проскальзываний. Так как диаметр кольца 6 превышает диаметр маховика 7, частота вращения последнего будет больше по сравнению с частотой вращения закрепленного на планшайбе 3 корпуса 5 УБУ. Это приводит к тому, что секторы 1 и 2 начнут разворачиваться относительно шлифовального круга 4, причем - за счет подбора передаточного отношения червячно-цилиндрической передачи - с разными угловыми скоростями. Общий центр масс указанных секторов 1 и 2 будет при этом перемещаться по спирали, вызывая тем самым изменение по аналогичной спирали и величины дисбаланса (вибрация в этом случае будет периодически возрастать или убывать), причем с тенденцией в сторону его уменьшения или увеличения. Если дисбаланс будет иметь тенденцию к уменьшению и вибродатчик в какой-то момент времени зафиксирует его допустимую величину, блок управления УБУ выключит электромагнит 16. Ролики 9 и 10 при этом отойдут под действием пружин 11 и 12 от кольца 6 и маховика 7, и дальнейший разворот секторов 1 и 2 прекратится. Если же дисбаланс будет иметь тенденцию к увеличению, блок управления УБУ также выключит электромагнит 16 и включит, в свою очередь, электромагнит 25. Последний прижмет тормозные накладки 23 и 24 к фрикционному маховику 7 (опять же не вызывая перекосов его вала относительно центральной оси),прекращая, тем самым, вращение последнего. Секторы 1 и 2 в этом случае начнут разворачиваться - причем опять же с различными угловыми скоростями - в обратном направлении, постепенно обеспечивая уменьшение дисбаланса до его допустимого значения. Предложенный вариант механизма регулирования положения корректирующих масс, обеспечивающий высокую надежность работы УБУ, может быть использован для достаточно различных (по принципу устранения дисбаланса, по конструктивному исполнению корректирующих масс, по траектории движения их общего центра тяжести, по заложенному в блоке управления алгоритму и т.п.) управляемых балансирующих устройств, в качестве основного элемента для регулирования положения корректирующих масс которых применяется как один, так и несколько фрикционных маховиков. В последнем случае каждый маховик снабжается своей парой роликов и (или) тормозных накладок, которые работают от отдельного, причем одного электромагнита, и обеспечивают (с двух противоположных сторон) прижим указанных маховиков, исключающий перекосы их несущих валов. Заказ 0404 Тираж 20 экз. Государственный патентный комитет Республики Беларусь. 220072, г. Минск, проспект Ф. Скорины, 66.
МПК / Метки
МПК: G01M 1/36
Метки: устройство, балансирующее, управляемое
Код ссылки
<a href="https://by.patents.su/5-1859-upravlyaemoe-balansiruyushhee-ustrojjstvo.html" rel="bookmark" title="База патентов Беларуси">Управляемое балансирующее устройство</a>
Устройство для формования изделий из вязкопластичных масс
Номер патента: 692
Опубликовано: 30.06.1995
Автор: Малиновский Г. Н.
МПК: B28B 5/02
Метки: изделий, устройство, вязкопластичных, формования, масс
Текст:
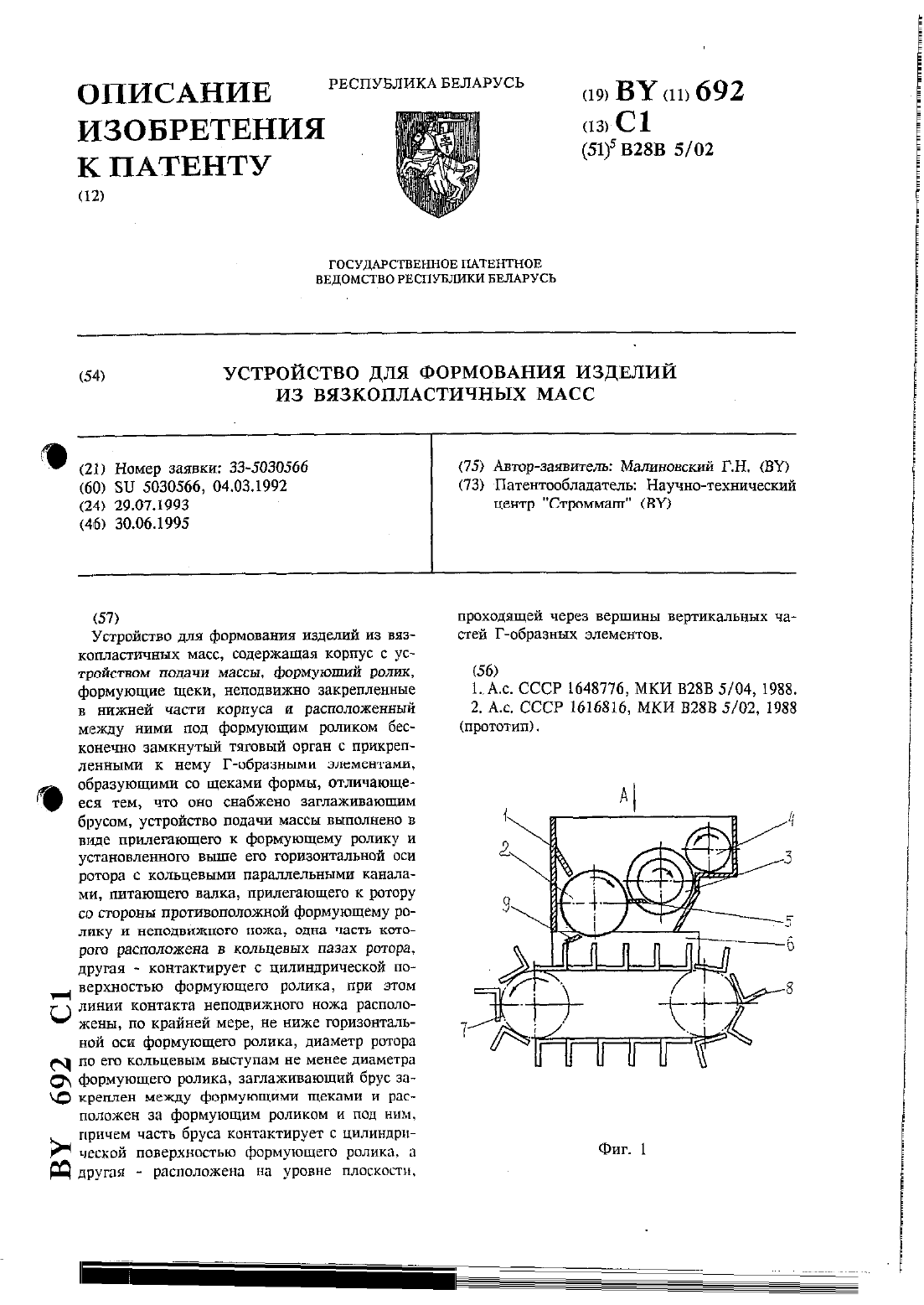
...выше его горизонтальной оси- питающий валок прилегает к ротору со стороны противоположной формуюшему ролику- одна часть неподвижного ножа расположена в кольцевых пазах ротора, дРУгая контактирует с цилиндрической поверхностью формующего ролика- линии контакта неподвижного ножа расположены, по крайней мере, не ниже горизонтальной оси формующего ролика- диаметр ролика по его кольцевым выступам не менее диаметра формующего ролика-...
Устройство для продольного разделения проката
Номер патента: 953
Опубликовано: 15.12.1995
Авторы: Иванов Геннадий Нариманович, Карцев Юрий Иванович, Рогачев Владимир Иванович
МПК: B21B 1/02
Метки: устройство, проката, продольного, разделения
Текст:
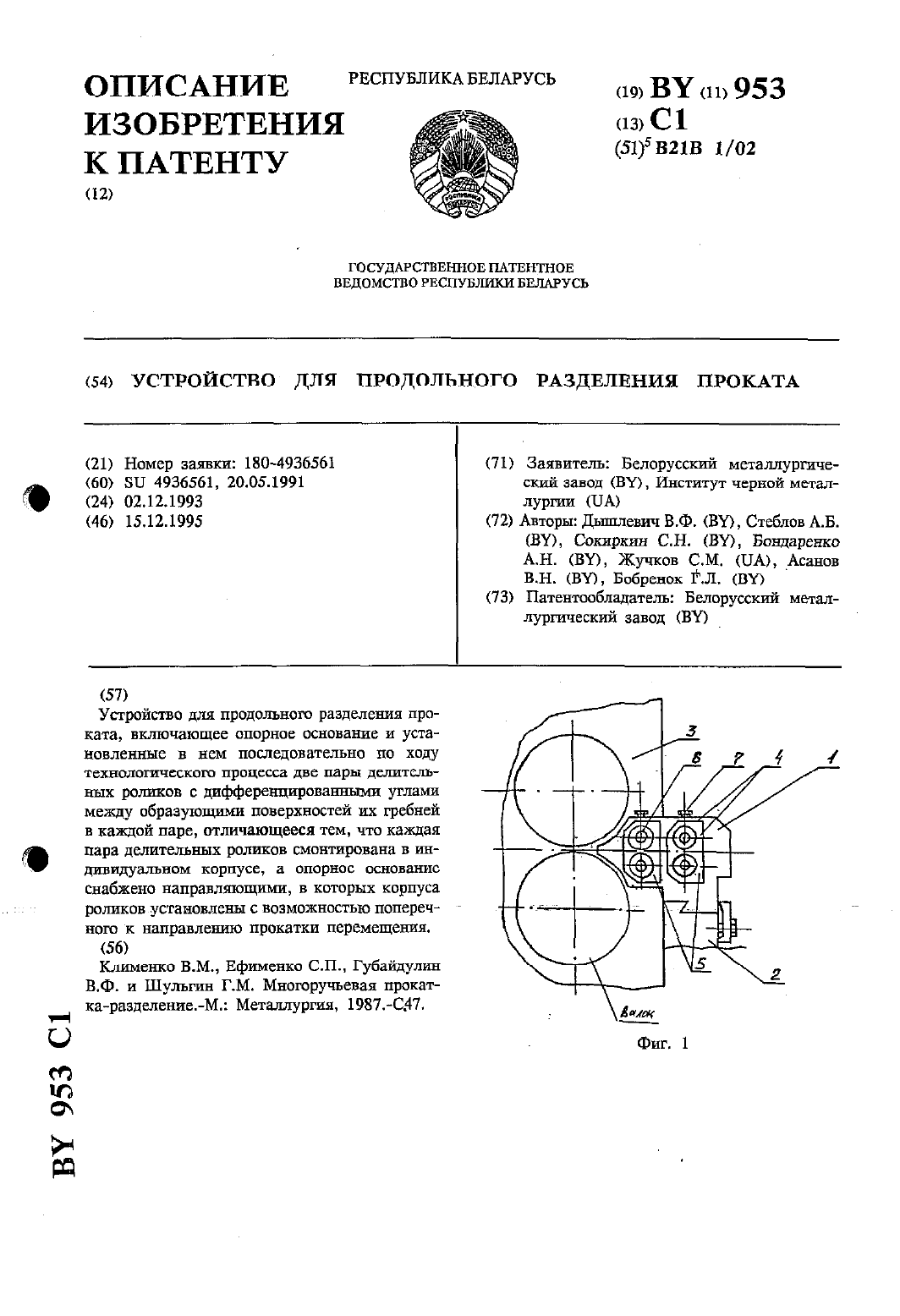
...пар делительных роликов,ЧТО также сокращает время На ЗЗМСНУ ДЕЛИ ТСЛЬНЫХ РОЛИКОВ И ПОВЬППЗСТ ПРОИЗВОДИТЕЛЬНОСТЬ СТННЗ.Идентичность корпусов каждой пары делительных роликов, позволяющая устанавливать в них любую пару делительных роликов, а также устанавливать собственно корпуса в любом окне опорного основания сокращает их количество, необходимое для стабильной работы на стане корпусов, обеспечивая, кроме прочего, следующее преимущество. В...
Устройство многоручьевой прокатки сортовых заготовок
Номер патента: 1024
Опубликовано: 15.12.1995
Авторы: Стеблов Анвер Борисович, Токмаков Вадим Анатольевич, Бондаренко Александр Николаевич, Асанов Валерий Николаевич, Сокиркин Сергей Николаевич, Бобренок Геннадий Людвигович, Жучков Сергей Михайлович, Дышлевич Виктор Федорович
МПК: B21H 1/02
Метки: прокатки, заготовок, многоручьевой, сортовых, устройство
Текст:
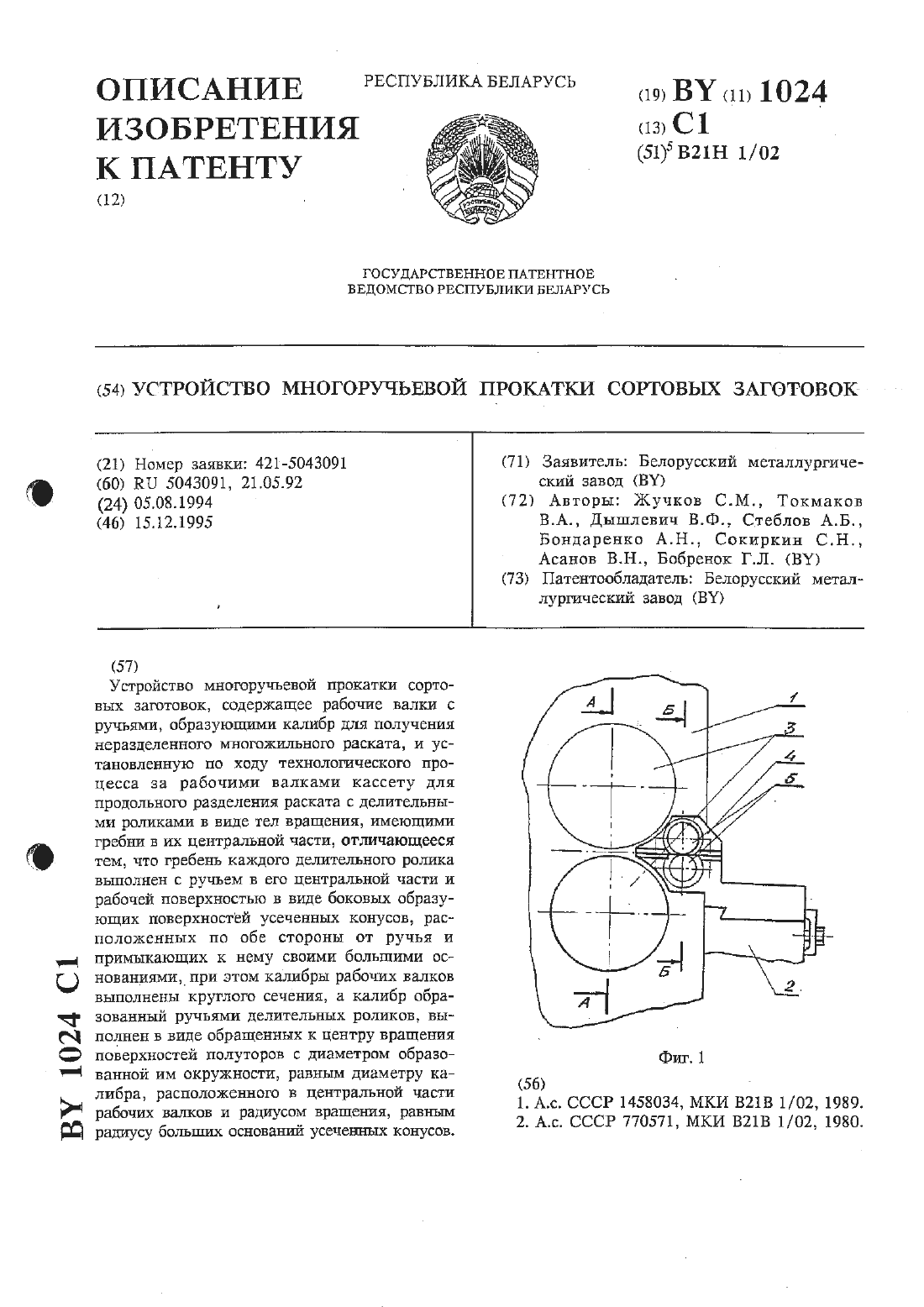
...этот участок размещен между двумя другими частями разделительного калибра.Сравнение с прототипом показывает, что заявляемое устройство отличается тем, что гребень каждого целительного ролика снабжен дополнительным участком, выполненным в виде обращенной к центру вращеъшя поверхности полутора, с диаметром его окружности,равным диаметру центральной части ручья рабочих валков, и радиусом вращения, равным радиусу больших оснований...
Устройство для удаления окалины с поверхности проволочных изделий
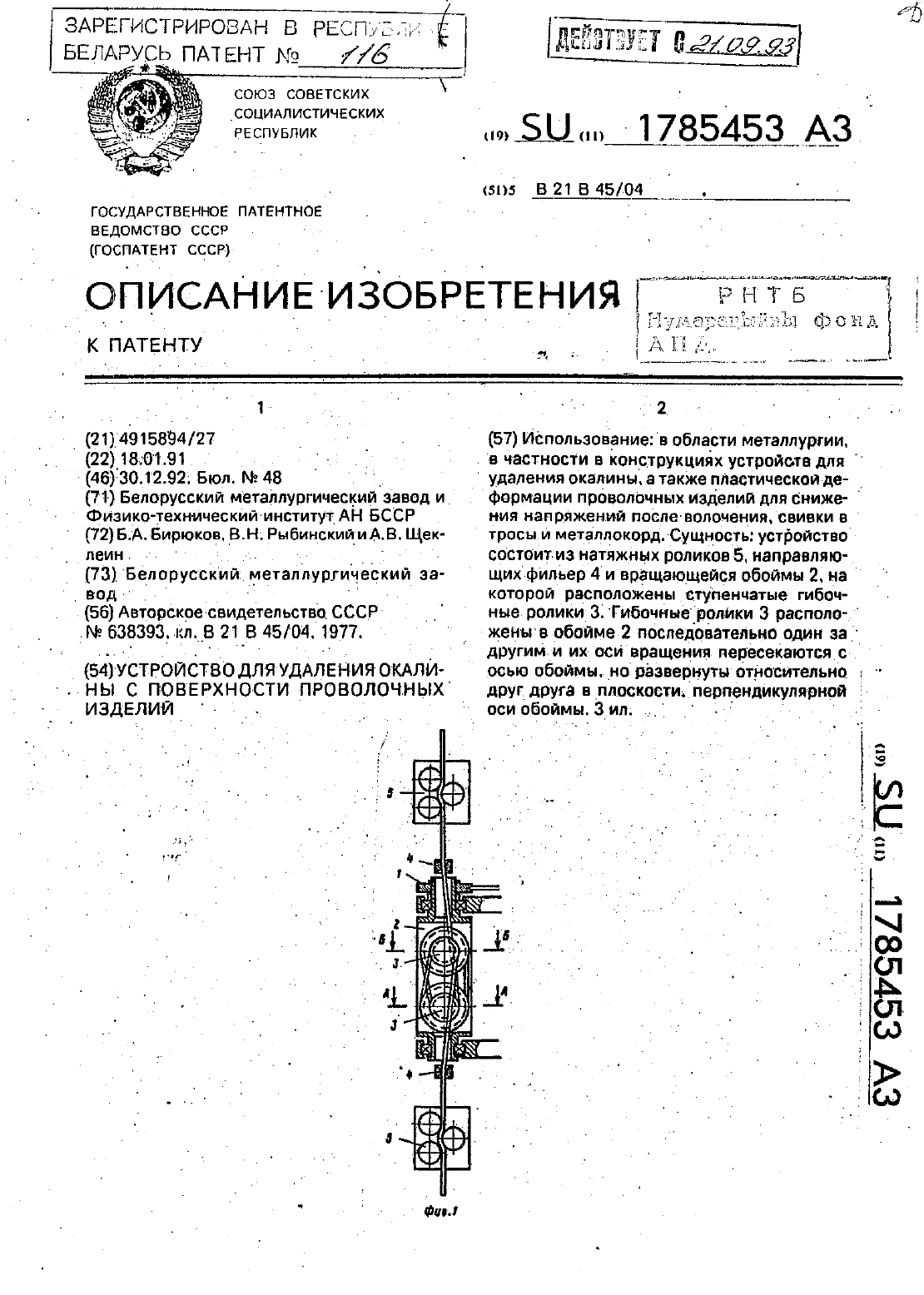
Номер патента: 116
Опубликовано: 30.09.1994
Авторы: Бирюков Б. А., Щеклеин А. В., Рыбинский В. Н.
МПК: B21B 45/04
Метки: проволочных, удаления, изделий, устройство, окалины, поверхности
Текст:
...поступая на вторые натяжные ролики. Разворот осей гибочньтх роликов отн-оси 10тельно друг друга обеспечивает свободный пропуск материала от направляющих филь ер к наиболее удаленному гибочному ролику с целью уменьшения угла изгиба материала в фильерах. йТакое конструктивное решение по сравнению с прототипом позволяет свести к.минимуму центробежныеосипы. действующие на опоры гибочных роликов. за счет размещения центра тяжести гибочных...
Устройство для изготовления погонажных труб из пресс-масс
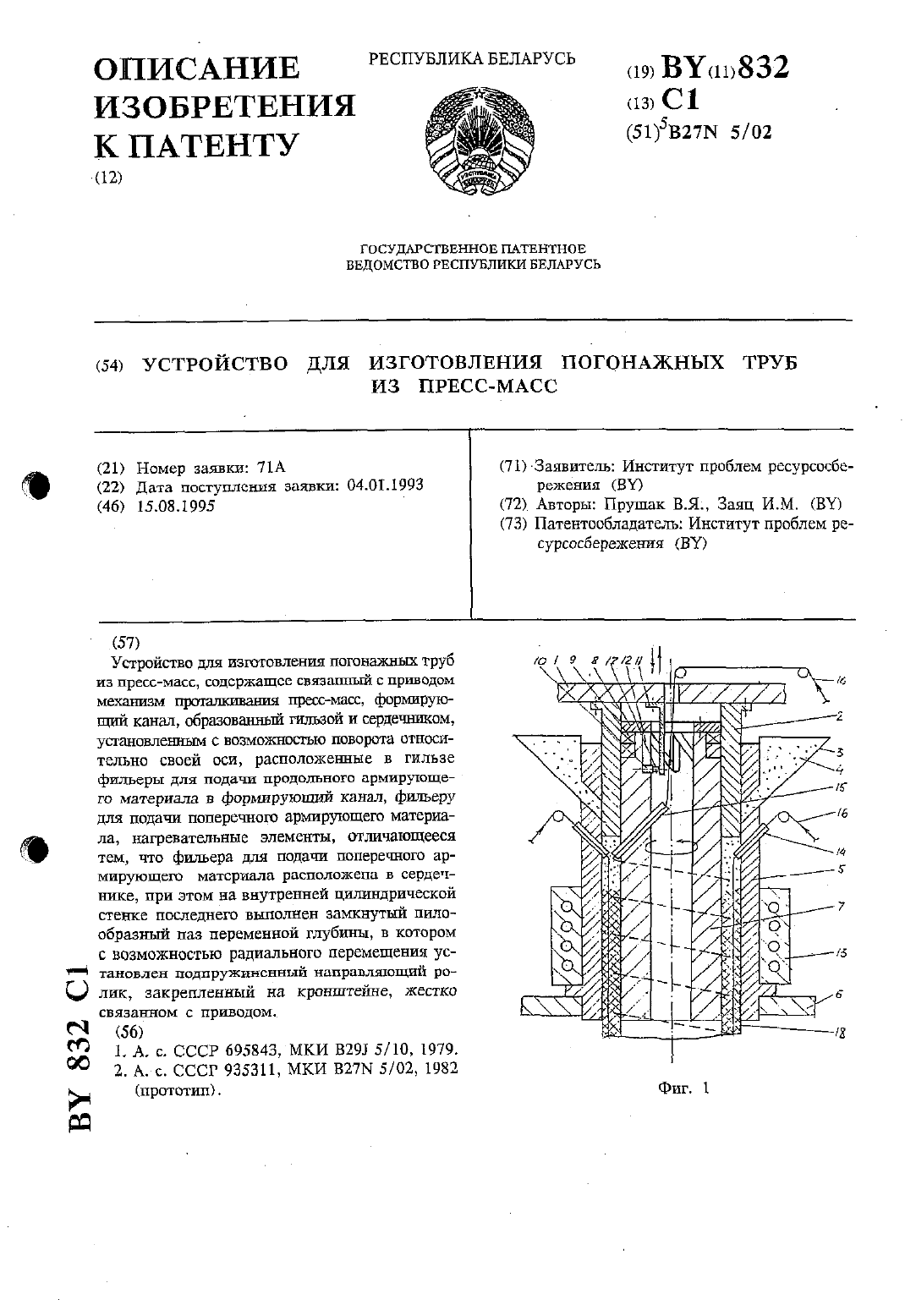
Номер патента: 832
Опубликовано: 15.08.1995
Авторы: Заяц И. М., Прушак В. Я.
МПК: B27N 5/02
Метки: изготовления, погонажных, труб, устройство, пресс-масс
Текст:
...в сердечнике, при этом на внутренней цишшдрической стенке последнего вьшолнен зашснутый гшлообразньщ паз переменной глубины, в котором с возможностьюрадиального перемещения установлен подпружииенный направляющий ролик, закрепленный на кронштейне, жестко связанном с приводом.На фиг. 1 изображено предлагаемое устройство в разрезе.На фиг. 2 изображена часть развертки замКНУТОГС) ПНЗН ССрДЕЧНИКЭ.На фит. 3 изображен разрез части замкнутого паза...
Предыдущий патент: Антифрикционный материал
Следующий патент: Управляемое балансировочное устройство
Случайный патент: Тележка для транспортировки в тоннелях метрополитена пожарного аварийно-спасательного оборудования и инструмента