Способ определения пространственного углового положения объекта относительно пассивной радионавигационной точки
Номер патента: 17185
Опубликовано: 30.06.2013
Авторы: Боровой Александр Григорьевич, Калитин Сергей Борисович, Морозов Дмитрий Васильевич


Текст
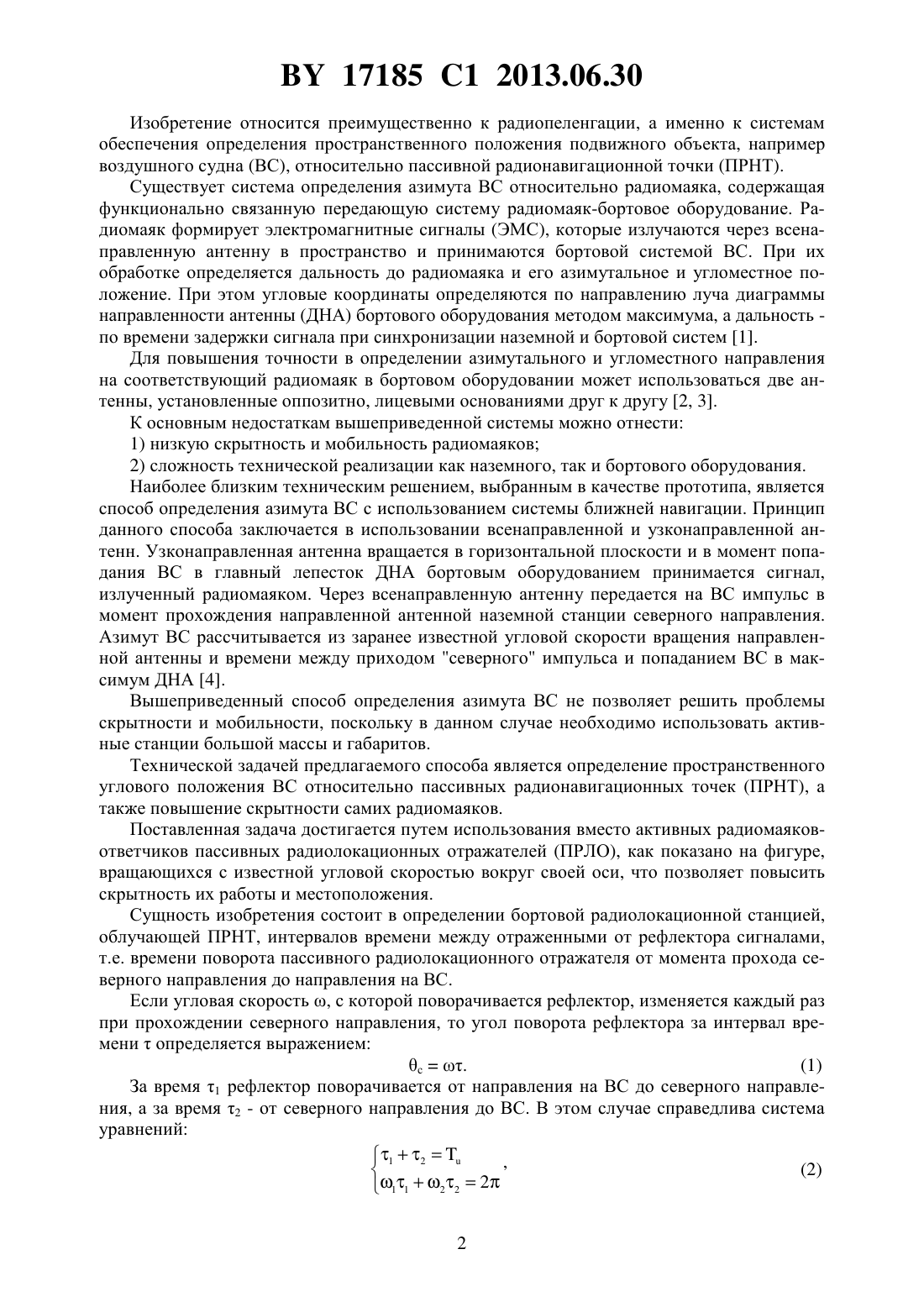
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО УГЛОВОГО ПОЛОЖЕНИЯ ОБЪЕКТА ОТНОСИТЕЛЬНО ПАССИВНОЙ РАДИОНАВИГАЦИОННОЙ ТОЧКИ(71) Заявитель Учреждение образования Военная академия Республики Беларусь(72) Авторы Калитин Сергей Борисович Морозов Дмитрий Васильевич Боровой Александр Григорьевич(73) Патентообладатель Учреждение образования Военная академия Республики Беларусь(57) Способ определения пространственного углового положения объекта относительно пассивной радионавигационной точки (ПРНТ), характеризующийся тем, что на объекте,например воздушном судне, посредством бортовой радиолокационной станции по двум отраженным от пассивного радиолокационного отражателя (ПРЛО) ПРНТ сигналам определяют времяполного поворота на 360 максимума индикатрисы рассеяния ПРЛО, вращающегося в горизонтальной плоскости с переменной угловой скоростью в направлении на объект, и время 1 прохождения упомянутым максимумом пространства от направления на объект до направления, принятого на ПРНТ и объекте за начало отсчета, например направления на север по известным на объекте данным об угловой скорости 0 поворота ПРЛО и о величине ее измененияопределяют угловое положение объектаотносительно ПРНТ из выражения 1(21 ) где р - угловая скорость поворота ПРЛО при изменении по выбранному закону, например косинусоидальному. 17185 1 2013.06.30 Изобретение относится преимущественно к радиопеленгации, а именно к системам обеспечения определения пространственного положения подвижного объекта, например воздушного судна (ВС), относительно пассивной радионавигационной точки (ПРНТ). Существует система определения азимута ВС относительно радиомаяка, содержащая функционально связанную передающую систему радиомаяк-бортовое оборудование. Радиомаяк формирует электромагнитные сигналы (ЭМС), которые излучаются через всенаправленную антенну в пространство и принимаются бортовой системой ВС. При их обработке определяется дальность до радиомаяка и его азимутальное и угломестное положение. При этом угловые координаты определяются по направлению луча диаграммы направленности антенны (ДНА) бортового оборудования методом максимума, а дальность по времени задержки сигнала при синхронизации наземной и бортовой систем 1. Для повышения точности в определении азимутального и угломестного направления на соответствующий радиомаяк в бортовом оборудовании может использоваться две антенны, установленные оппозитно, лицевыми основаниями друг к другу 2, 3. К основным недостаткам вышеприведенной системы можно отнести 1) низкую скрытность и мобильность радиомаяков 2) сложность технической реализации как наземного, так и бортового оборудования. Наиболее близким техническим решением, выбранным в качестве прототипа, является способ определения азимута ВС с использованием системы ближней навигации. Принцип данного способа заключается в использовании всенаправленной и узконаправленной антенн. Узконаправленная антенна вращается в горизонтальной плоскости и в момент попадания ВС в главный лепесток ДНА бортовым оборудованием принимается сигнал,излученный радиомаяком. Через всенаправленную антенну передается на ВС импульс в момент прохождения направленной антенной наземной станции северного направления. Азимут ВС рассчитывается из заранее известной угловой скорости вращения направленной антенны и времени между приходом северного импульса и попаданием ВС в максимум ДНА 4. Вышеприведенный способ определения азимута ВС не позволяет решить проблемы скрытности и мобильности, поскольку в данном случае необходимо использовать активные станции большой массы и габаритов. Технической задачей предлагаемого способа является определение пространственного углового положения ВС относительно пассивных радионавигационных точек (ПРНТ), а также повышение скрытности самих радиомаяков. Поставленная задача достигается путем использования вместо активных радиомаяковответчиков пассивных радиолокационных отражателей (ПРЛО), как показано на фигуре,вращающихся с известной угловой скоростью вокруг своей оси, что позволяет повысить скрытность их работы и местоположения. Сущность изобретения состоит в определении бортовой радиолокационной станцией,облучающей ПРНТ, интервалов времени между отраженными от рефлектора сигналами,т.е. времени поворота пассивного радиолокационного отражателя от момента прохода северного направления до направления на ВС. Если угловая скорость , с которой поворачивается рефлектор, изменяется каждый раз при прохождении северного направления, то угол поворота рефлектора за интервал времениопределяется выражением с.(1) За время 1 рефлектор поворачивается от направления на ВС до северного направления, а за время 2 - от северного направления до ВС. В этом случае справедлива система уравнений 12 17185 1 2013.06.30 где- интервал времени между двумя отраженными сигналами от ПРНТ, т.е. время полного поворота рефлектора вокруг своей оси в направлении на ВС. Выразив из первого уравнения системы 1 и подставив его во второе уравнение, получаем(4) 21 Таким образом, измеряя с помощью РЛС ВС интервал времении учитывая, что угловые скорости вращения 1 и 2 известны, в РЛС определяется курсовой угол ПРНТ 21 2 . с 2 2(5) 21 Так как вычисление происходит в случайный момент времени, то для измерения истинного углового положения ПРНТ сравниваются два интервала времени 1 и 2. Если при условии, что 12 , выполняется неравенство 12 , то 21 2 ,с(7) 12 В настоящее время реализация ПРНТ с мгновенным изменением скорости вращения рефлектора практически невозможна. Это связано с рядом технических особенностей редукторов. Поэтому при реализации предлагаемого способа необходимо применять ПРНТ с плавно изменяющейся скоростью вращения отражателя. При этом угловая скорость , с которой поворачивается рефлектор, должна изменяться по какому-либо известному закону, например0 ,(8) где 0 - угловая скорость поворота ПРЛО- угловая скорость поворота ПРЛО при изменении по выбранному закону, например косинусоидальному- величина изменения угловой скорости поворота ПРЛО. Тогда угол поворота ПРНТ за времяопределяется выражением Так как за период вращения ПРНТ производит поворот на 360, то 2(0(. Припериод вращения ПРНТ будет такой же, как и при постоянной угловой скорости 0, а при(где- коэффициент пропорциональности) период вращения находится из уравнения(2 ) . 0 0 Так как за период вращения угол ПРНТ совершает полный поворот на 360, то Выражая из выражения (16) 1, получаем(221 )(20 ) Таким образом, посредствам бортовой радиолокационной станции по двум отраженным от ПРЛО ПРНТ сигналам определяют время Т полного поворота на 360 максимума индикатрисы рассеяния ПРЛО и при условии, что значенияи 0 известны, рассчитывается значение угла , откуда определяется и азимут ПРНТ относительно ВС ПРНТ 360.(21) Описанный способ определения пространственного углового положения ВС относительно ПРНТ имеет ряд важных достоинств 1) за направление на север можно задавать любое другое направление, например вдоль взлетно-посадочной полосы (ВПП) 2) неограниченная пропускная способность20 12 17185 1 2013.06.30 3) повышение скрытности за счет использования ПРНТ 4) повышение мобильности за счет использования ПРЛО небольшой массы и габаритов. Источники информации 1. Авиационная радионавигация Справочник / Под ред. А.А. Сосновского. - М. Транспорт, 1990. - С. 151. 2. Патент 02282864. 3. Патент 02282865. 4. Калитин С.Б. Бортовое оборудование радиотехнических систем ближней навигации Учебное пособие. - Минск, 2009. - С. 45-63. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01S 13/75
Метки: пассивной, положения, углового, точки, определения, пространственного, объекта, способ, относительно, радионавигационной
Код ссылки
<a href="https://by.patents.su/5-17185-sposob-opredeleniya-prostranstvennogo-uglovogo-polozheniya-obekta-otnositelno-passivnojj-radionavigacionnojj-tochki.html" rel="bookmark" title="База патентов Беларуси">Способ определения пространственного углового положения объекта относительно пассивной радионавигационной точки</a>
Устройство определения углового положения вращающегося объекта
Номер патента: 3712
Опубликовано: 30.12.2000
Авторы: Ярмолович Вячеслав Алексеевич, Анищик Виктор Михайлович
МПК: G01B 7/30
Метки: углового, определения, вращающегося, устройство, объекта, положения
Текст:
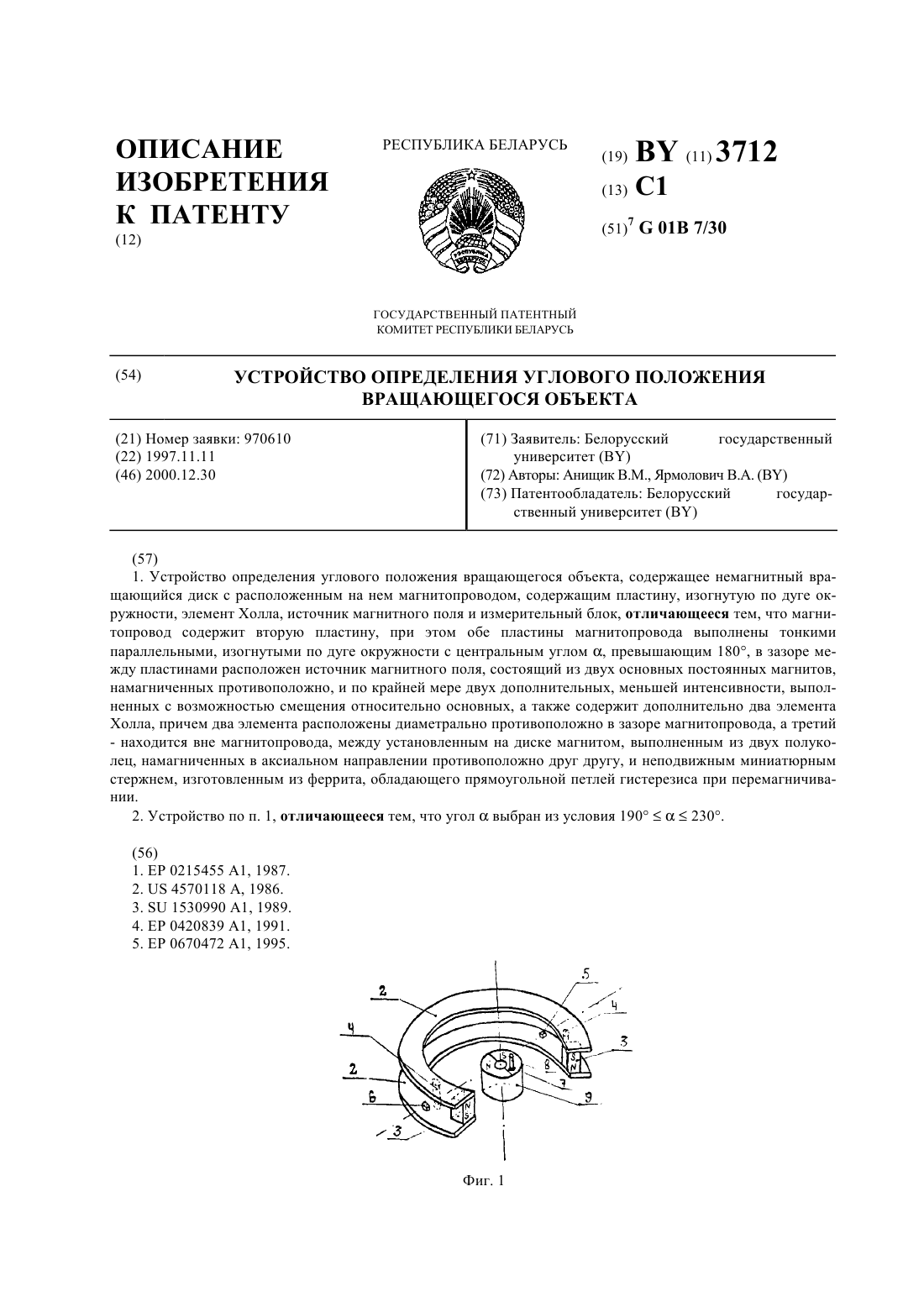
...источников магнитного поля в магнитопроводе, обеспечивающее строго линейную зависимость выходного сигнала от угла поворота в диапазоне углов более 180 при многооборотном вращении независимо от идентичности и симметричности постоянных магнитов. При этом выходной сигнал не зависит от аксиальных смещений вращающегося диска. Новым является использование трех элементов Холла, находящихся в функциональной связи с источниками магнитного...
Способ и система для определения углового перемещения объекта

Номер патента: 9068
Опубликовано: 30.04.2007
Авторы: Исаев Александр Витальевич, Зуйков Игорь Евгеньевич
МПК: G01C 19/66, G01P 3/36
Метки: перемещения, объекта, углового, способ, определения, система
Текст:
...обеспечиваемая таким методом стабильность нуля будет на 12 порядка хуже. Кроме этого, нелинейная зависимость скорости вращения приводов от приложенного напряжения также отрицательно сказывается на погрешности такой измерительной системы 5. Задача изобретения заключается в разработке способа измерения угловых перемещений и системы кольцевого лазера для измерения угловых перемещений объекта с повышенной разрешающей способностью и уменьшенной...
Бесконтактный датчик углового положения
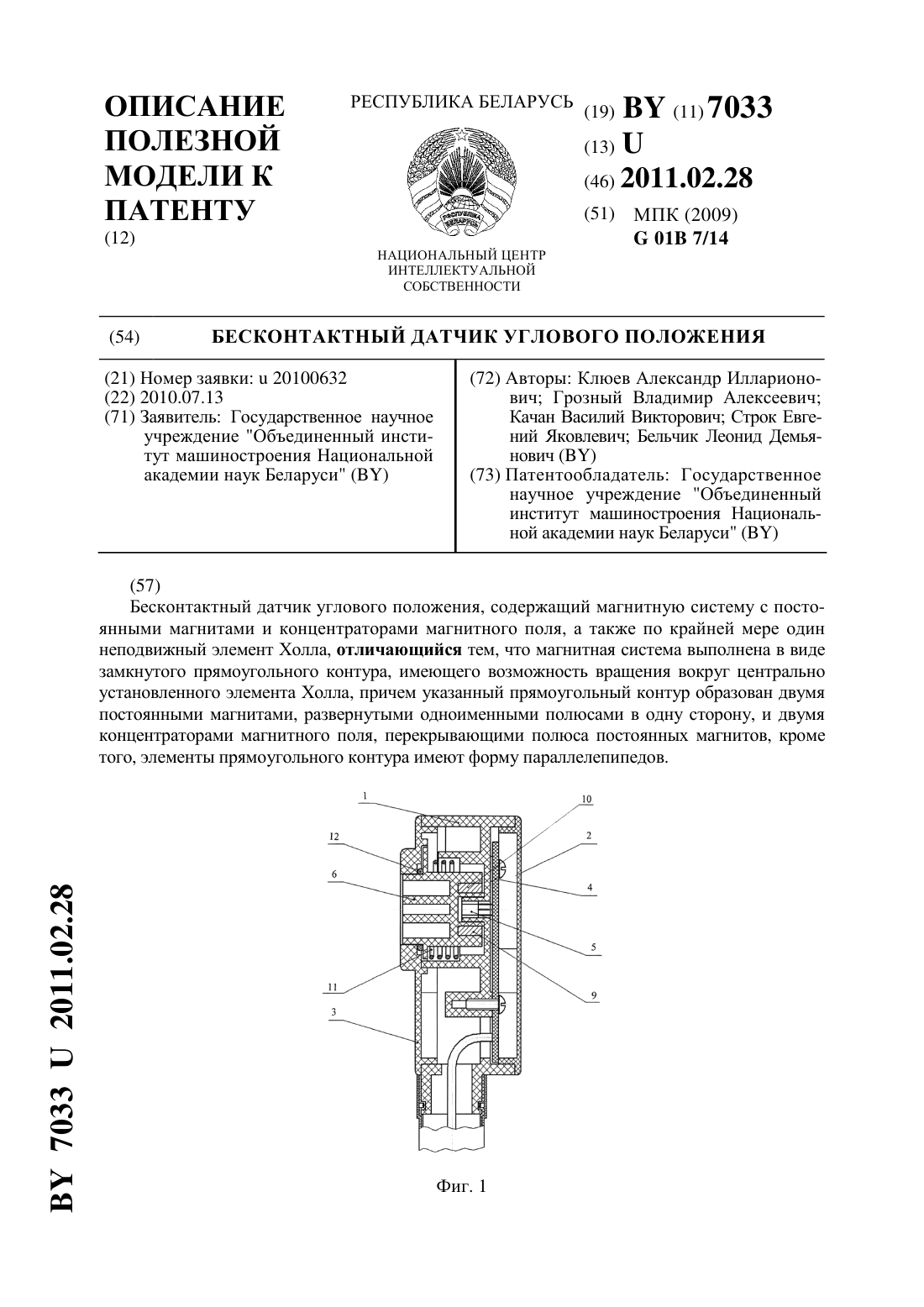
Номер патента: U 7033
Опубликовано: 28.02.2011
Авторы: Качан Василий Викторович, Грозный Владимир Алексеевич, Строк Евгений Яковлевич, Бельчик Леонид Демьянович, Клюев Александр Илларионович
МПК: G01B 7/14
Метки: бесконтактный, положения, датчик, углового
Текст:
...магнита относительно оси, проходящей между концентраторами, происходит перераспределение магнитного потока внутри магнитной системы,величина которого измеряется элементами Холла. Недостатками известного датчика являются низкая помехозащищенность из-за разомкнутой магнитной системы, нетехнологичность изготовления и сборки при относительно больших габаритных размерах. Задачей настоящей полезной модели является повышение помехоустойчивости к...
Датчик абсолютного углового положения рулевого колеса
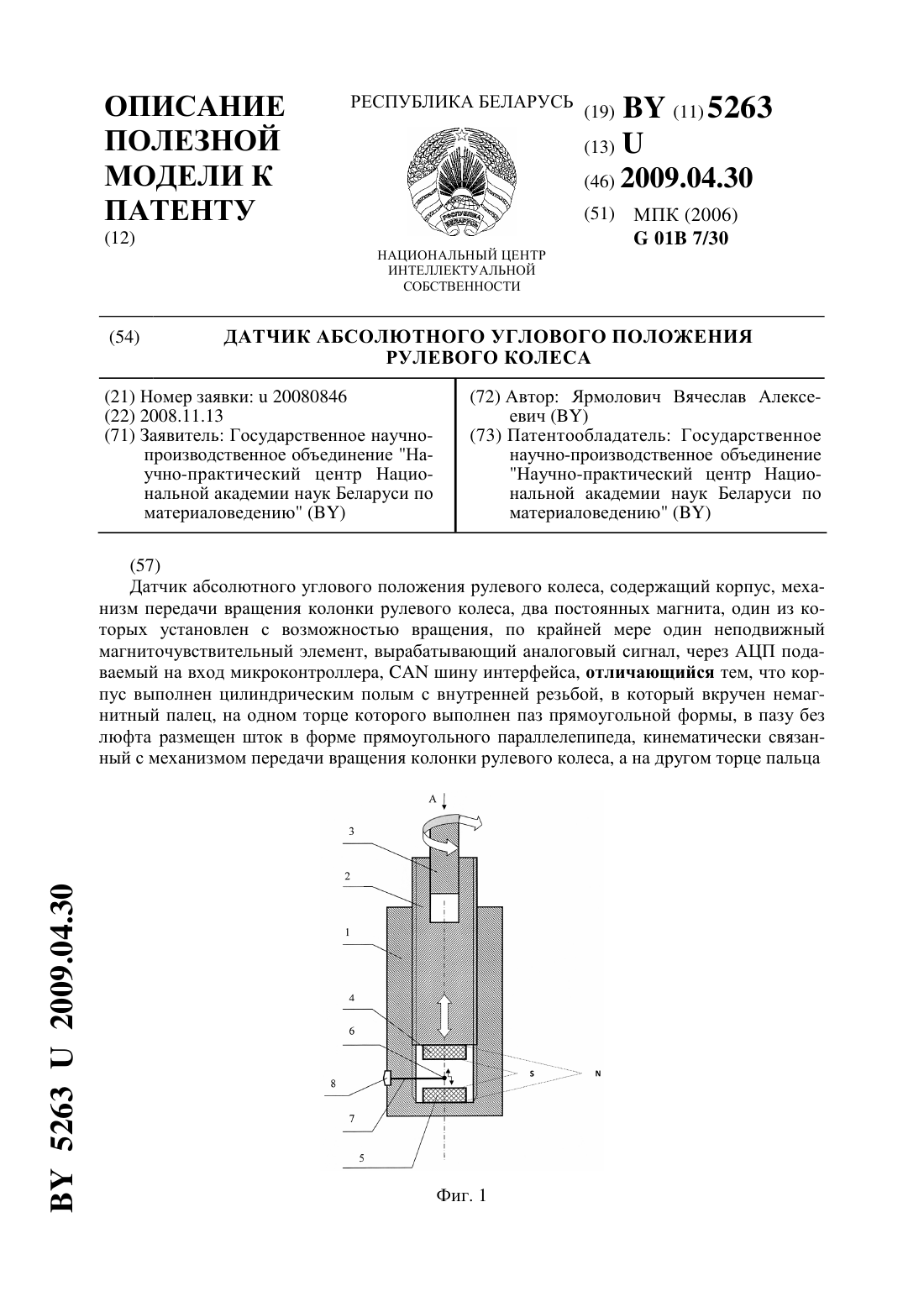
Номер патента: U 5263
Опубликовано: 30.04.2009
Автор: Ярмолович Вячеслав Алексеевич
МПК: G01B 7/30
Метки: положения, абсолютного, колеса, углового, датчик, рулевого
Текст:
...крайней мере один неподвижный магниточувствительный элемент, вырабатывающий аналоговый сигнал, через АЦП подаваемый на вход микроконтроллера,шину интерфейса, отличается тем, что корпус выполнен цилиндрическим полым с внутренней резьбой, в который вкручен немагнитный палец, на одном торце которого выполнен паз прямоугольной формы, в пазу без люфта размещен шток в форме прямоугольного параллепипеда, кинематически связанный с механизмом передачи...
Способ определения положения измерительной головки манипулятора

Номер патента: 5419
Опубликовано: 30.09.2003
Авторы: Филонов Игорь Павлович, Вериго Евгений Борисович
МПК: B25J 11/00
Метки: определения, измерительной, головки, положения, способ, манипулятора
Текст:
...(2) преобразуют выражения (3) и (4) к виду х 23( 23 ) 3(6) Выражения (5) и (6) в матричной форме имеют вид где 2 - ошибка отработки обобщенной координаты 2 3 - ошибка отработки обобщенной координаты 3 х - ошибка положения измерительной головки относительно базовой оси х 0 системы координат робота у - ошибка положения измерительной головки относительно базовой оси у 0 системы координат робота. Матрица 22 в правой части матричной записи...
Предыдущий патент: Способ хирургического лечения релаксации диафрагмы
Следующий патент: Способ производства осесимметричных слоистых металлических заготовок
Случайный патент: Способ восстановления вертикального положения сооружения, имеющего значительную высоту