Магнитоиндукционный датчик для измерения параметров динамического индентирования
Номер патента: U 5150
Опубликовано: 30.04.2009
Авторы: Крень Александр Петрович, Рудницкий Валерий Аркадьевич, Мацулевич Олег Владимирович
Текст
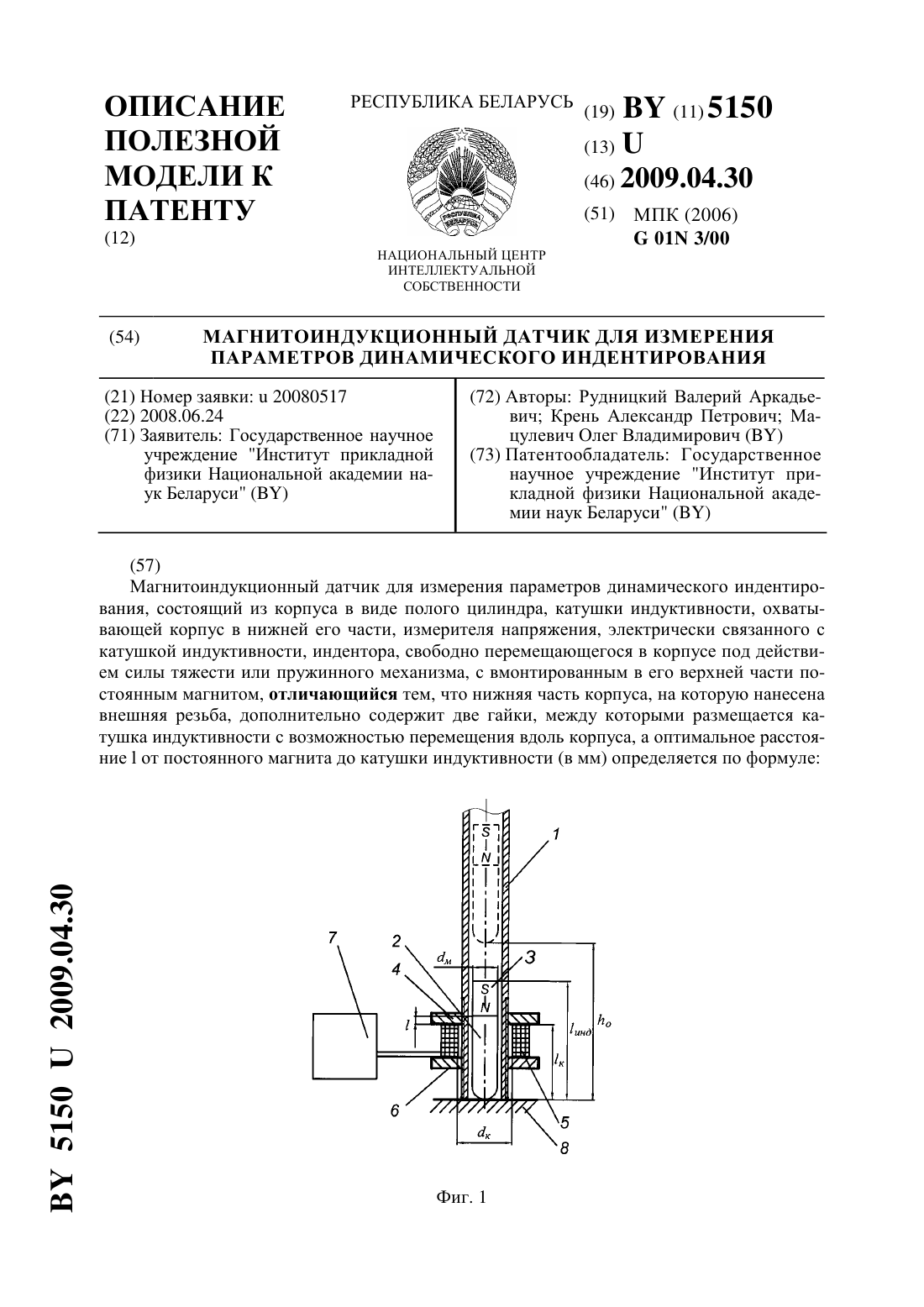
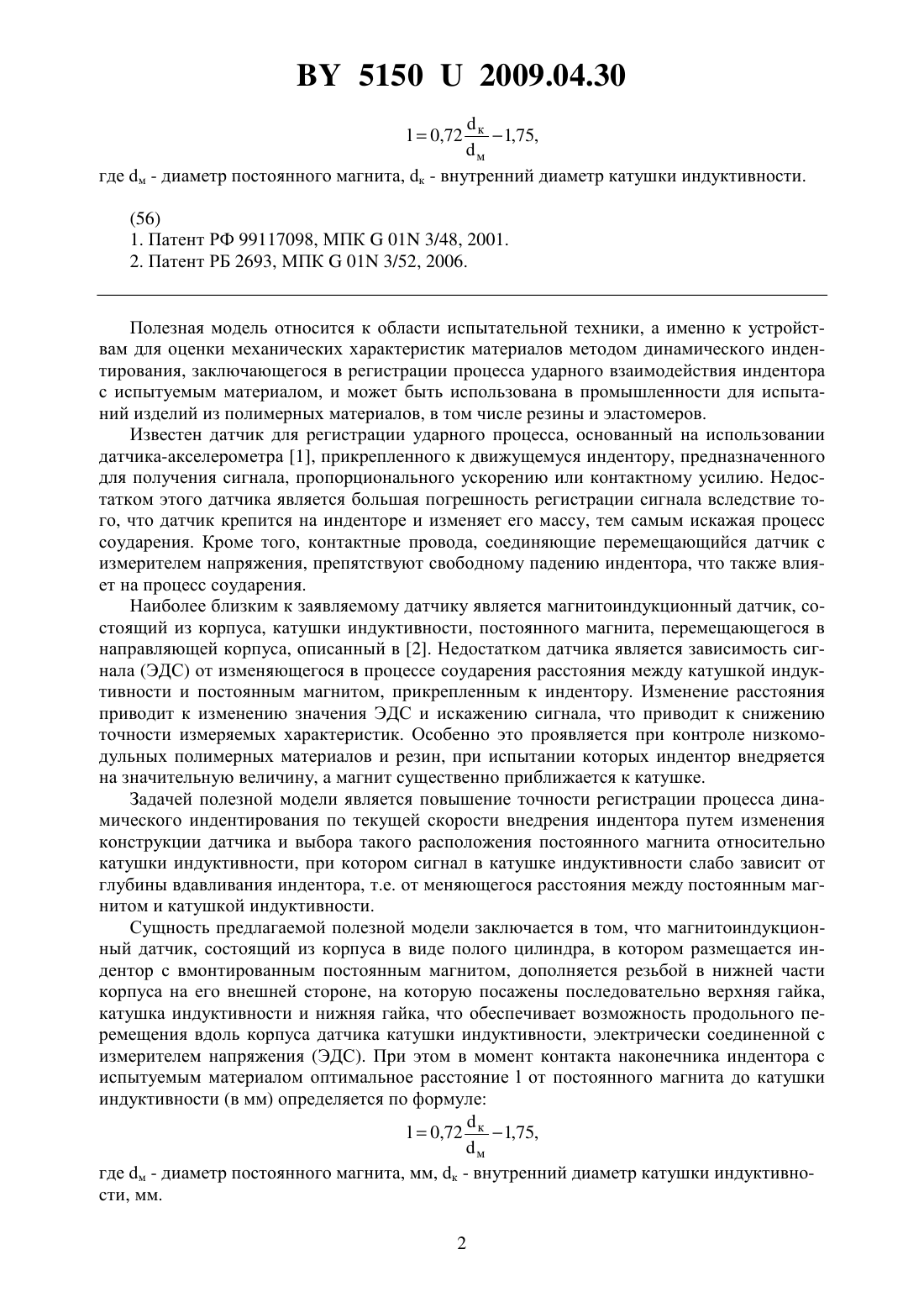
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МАГНИТОИНДУКЦИОННЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИНАМИЧЕСКОГО ИНДЕНТИРОВАНИЯ(71) Заявитель Государственное научное учреждение Институт прикладной физики Национальной академии наук Беларуси(72) Авторы Рудницкий Валерий Аркадьевич Крень Александр Петрович Мацулевич Олег Владимирович(73) Патентообладатель Государственное научное учреждение Институт прикладной физики Национальной академии наук Беларуси(57) Магнитоиндукционный датчик для измерения параметров динамического индентирования, состоящий из корпуса в виде полого цилиндра, катушки индуктивности, охватывающей корпус в нижней его части, измерителя напряжения, электрически связанного с катушкой индуктивности, индентора, свободно перемещающегося в корпусе под действием силы тяжести или пружинного механизма, с вмонтированным в его верхней части постоянным магнитом, отличающийся тем, что нижняя часть корпуса, на которую нанесена внешняя резьба, дополнительно содержит две гайки, между которыми размещается катушка индуктивности с возможностью перемещения вдоль корпуса, а оптимальное расстояниеот постоянного магнита до катушки индуктивности (в мм) определяется по формуле 51502009.04.30 к 1,75,м где м - диаметр постоянного магнита, к - внутренний диаметр катушки индуктивности.0,72(56) 1. Патент РФ 99117098, МПК 01 3/48, 2001. 2. Патент РБ 2693, МПК 01 3/52, 2006. Полезная модель относится к области испытательной техники, а именно к устройствам для оценки механических характеристик материалов методом динамического индентирования, заключающегося в регистрации процесса ударного взаимодействия индентора с испытуемым материалом, и может быть использована в промышленности для испытаний изделий из полимерных материалов, в том числе резины и эластомеров. Известен датчик для регистрации ударного процесса, основанный на использовании датчика-акселерометра 1, прикрепленного к движущемуся индентору, предназначенного для получения сигнала, пропорционального ускорению или контактному усилию. Недостатком этого датчика является большая погрешность регистрации сигнала вследствие того, что датчик крепится на инденторе и изменяет его массу, тем самым искажая процесс соударения. Кроме того, контактные провода, соединяющие перемещающийся датчик с измерителем напряжения, препятствуют свободному падению индентора, что также влияет на процесс соударения. Наиболее близким к заявляемому датчику является магнитоиндукционный датчик, состоящий из корпуса, катушки индуктивности, постоянного магнита, перемещающегося в направляющей корпуса, описанный в 2. Недостатком датчика является зависимость сигнала (ЭДС) от изменяющегося в процессе соударения расстояния между катушкой индуктивности и постоянным магнитом, прикрепленным к индентору. Изменение расстояния приводит к изменению значения ЭДС и искажению сигнала, что приводит к снижению точности измеряемых характеристик. Особенно это проявляется при контроле низкомодульных полимерных материалов и резин, при испытании которых индентор внедряется на значительную величину, а магнит существенно приближается к катушке. Задачей полезной модели является повышение точности регистрации процесса динамического индентирования по текущей скорости внедрения индентора путем изменения конструкции датчика и выбора такого расположения постоянного магнита относительно катушки индуктивности, при котором сигнал в катушке индуктивности слабо зависит от глубины вдавливания индентора, т.е. от меняющегося расстояния между постоянным магнитом и катушкой индуктивности. Сущность предлагаемой полезной модели заключается в том, что магнитоиндукционный датчик, состоящий из корпуса в виде полого цилиндра, в котором размещается индентор с вмонтированным постоянным магнитом, дополняется резьбой в нижней части корпуса на его внешней стороне, на которую посажены последовательно верхняя гайка,катушка индуктивности и нижняя гайка, что обеспечивает возможность продольного перемещения вдоль корпуса датчика катушки индуктивности, электрически соединенной с измерителем напряжения (ЭДС). При этом в момент контакта наконечника индентора с испытуемым материалом оптимальное расстояниеот постоянного магнита до катушки индуктивности (в мм) определяется по формуле 0,72 к 1,75,м где м - диаметр постоянного магнита, мм, к - внутренний диаметр катушки индуктивности, мм. 2 51502009.04.30 На фиг. 1 приведена схема магнитоиндукционного датчика для измерения параметров динамического индентирования. На фиг. 2 показаны кривые изменения напряжения(ЭДС), пропорционального скорости индентора в процессе его соударения с испытуемым материалом при оптимальном и произвольном (неоптимальном) расстояниях между катушкой индуктивности и постоянным магнитом. Магнитоиндукционный датчик (фиг. 1) состоит из корпуса 1 в виде полого цилиндра,в котором размещается индентор 2 с вмонтированным постоянным магнитом 3. В нижней части корпуса 1 на внешней стороне нарезана резьба, на которую посажены последовательно гайка 4, катушка индуктивности 5 и гайка 6, что обеспечивает возможность продольного перемещения катушки индуктивности 5. Катушка индуктивности 5 соединена электрически с измерителем напряжения 7. Позицией 8 обозначена поверхность испытуемого материала. Повышение точности регистрации сигнала при использовании полезной модели происходит за счет установки катушки индуктивности, имеющей возможность продольного перемещения относительно корпуса датчика. Это позволяет установить катушку индуктивности в такое положение, что во время контакта индентора с поверхностью испытуемого материала, соответствующее максимуму индуцируемого сигнала, перемещение индентора слабо изменяет значение индуцируемого сигнала, который, в свою очередь,пропорционален только скорости индентора. Рассмотрим работу полезной модели на конкретном примере индентирования образца из полиуретана. Вначале рассчитываем оптимальное расстояние(в мм) между катушкой индуктивности и постоянным магнитом, соответствующее контакту индентора с поверхностью испытуемого материала по формуле Используя конкретные параметры к 13,2 мм, м 4 мм и подставляя эти значения в формулу, получаем 0,63 мм. Измеряем длину индентора от конца полусферического наконечника до постоянного магнита инд 15 мм и, отнимая от инд рассчитанную по формуле длину 0,63 мм, получаем значение расстояния к от основания корпуса датчика, на котором должна располагаться катушка индуктивности (фиг. 1). к 15 - 0,6314,37 мм. Откладываем это расстояние от основания корпуса датчика и наносим риску на корпусе. Навинчиваем верхнюю гайку на корпус датчика и устанавливаем таким образом, чтобы ее нижняя торцевая поверхность совпадала с риской, соответствующей полученному значению 1 к. К верхней гайке вплотную размещаем катушку индуктивности и закручиваем нижнюю гайку. Поднимаем индентор с постоянным магнитом на определенную высоту 0(в нашем примере 0200 мм) и отпускаем его. Под действием силы тяжести индентор в момент его контакта с поверхностью испытуемого материала приобретает скорость 02 01,98 м/с , где-ускорение силы тяжести. Во время контакта индентора с испытуемым материалом ЭДС и соответственно скорость индентора снижается от максимального значения до нуля. При этом в катушке индуктивности наводится сигнал,пропорциональный только скорости индентора. Для случая установки катушки на оптимальном расстоянииизменение напряженияв катушке индуктивности, регистрируемое измерителем напряжения 7, иллюстрируется графически кривой 1 на фиг. 2. Время, за которое скорость индентора уменьшается до нуля, составляет 430 мс. Изменение напряжения представлено в безразмерных относительных единицах через отношение текущего значения напряженияк его максимальному значению 0. Если провести сбрасывание индентора с той же высоты 0, но при установке катушки индуктивности на расстоянии большем, чем(в нашем примере 2 мм), то зависимость изменения скорости будет соответствовать кривой 2 (фиг. 2). Из приведенного примера работы полезной модели вид 3 51502009.04.30 но, что кривая 2 отличается от кривой 1 большими значениями текущей скорости вследствие искажения сигнала из-за влияния непостоянства расстояния между катушкой индуктивности и постоянным магнитом, вмонтированным в инденторе. Поскольку для расчета физико-механических характеристик испытуемых материалов используется информация, заложенная во всей кривой , то повышение точности определения искомых ха 0 рактеристик составляет не менее 10-15 . Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: G01N 3/00
Метки: индентирования, параметров, динамического, магнитоиндукционный, измерения, датчик
Код ссылки
<a href="https://by.patents.su/4-u5150-magnitoindukcionnyjj-datchik-dlya-izmereniya-parametrov-dinamicheskogo-indentirovaniya.html" rel="bookmark" title="База патентов Беларуси">Магнитоиндукционный датчик для измерения параметров динамического индентирования</a>
Индуктивный датчик износа тормозных накладок автомобилей
Номер патента: U 3484
Опубликовано: 30.04.2007
Авторы: Куликов Сергей Михайлович, Карташевич Анатолий Николаевич
МПК: F16D 66/00
Метки: износа, автомобилей, тормозных, накладок, индуктивный, датчик
Текст:
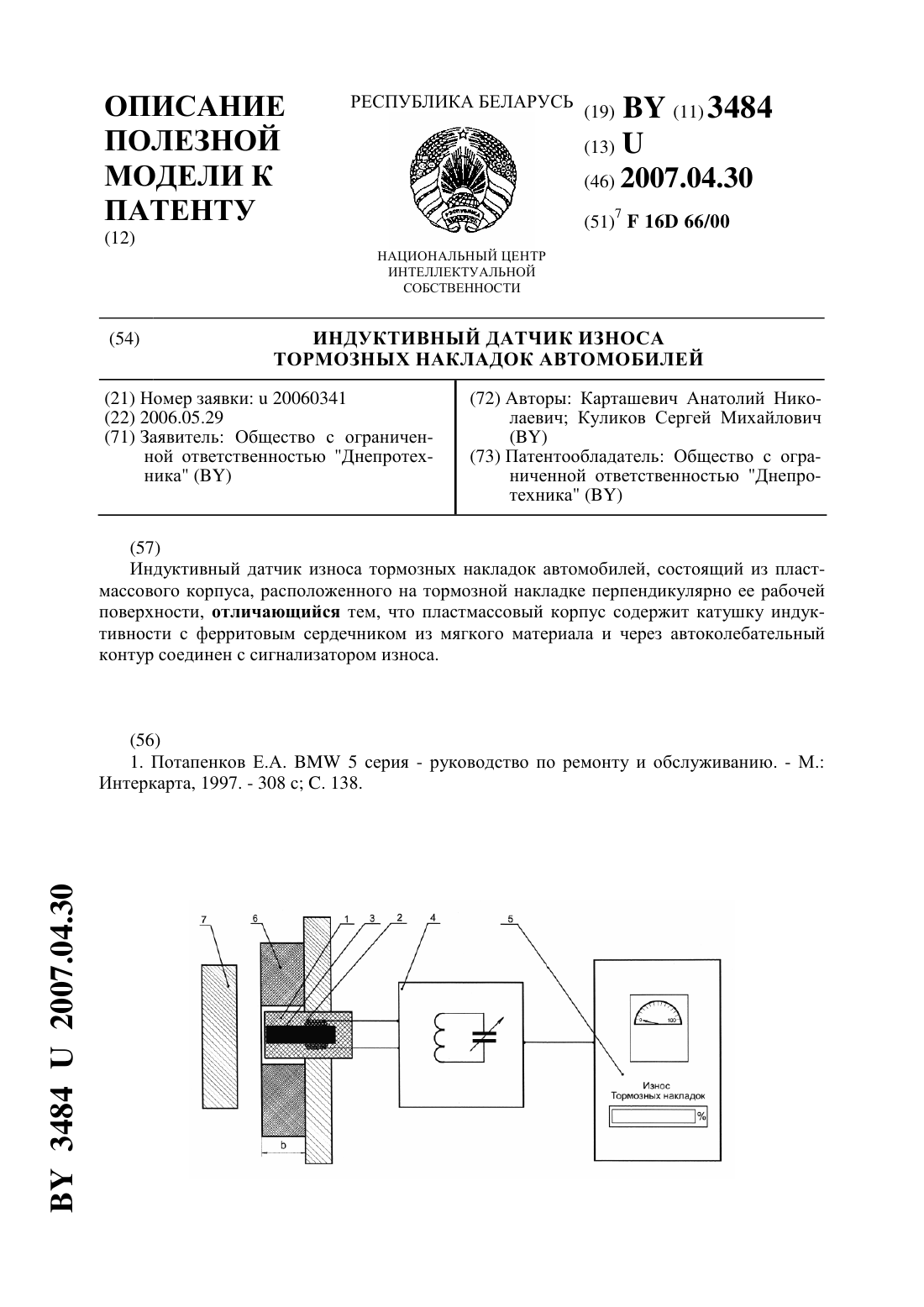
...контур соединен с сигнализатором износа. На фигуре представлена схема индуктивного датчика износа тормозных накладок автомобилей. Схема индуктивного датчика износа тормозных накладок автомобилей состоит из пластмассового корпуса 1, расположенного на тормозной накладке перпендикулярно ее рабочей поверхности, катушки индуктивности 2, ферритового сердечника из мягкого материала 3, автоколебательного контура 4, сигнализатора износа 5,...
Индуктивно-цифровой датчик износа тормозных накладок автомобилей
Номер патента: U 4611
Опубликовано: 30.08.2008
Авторы: Рудашко Александр Александрович, Карташевич Анатолий Николаевич, Скадорва Андрей Феликсович
МПК: F16D 66/00
Метки: тормозных, автомобилей, индуктивно-цифровой, износа, датчик, накладок
Текст:
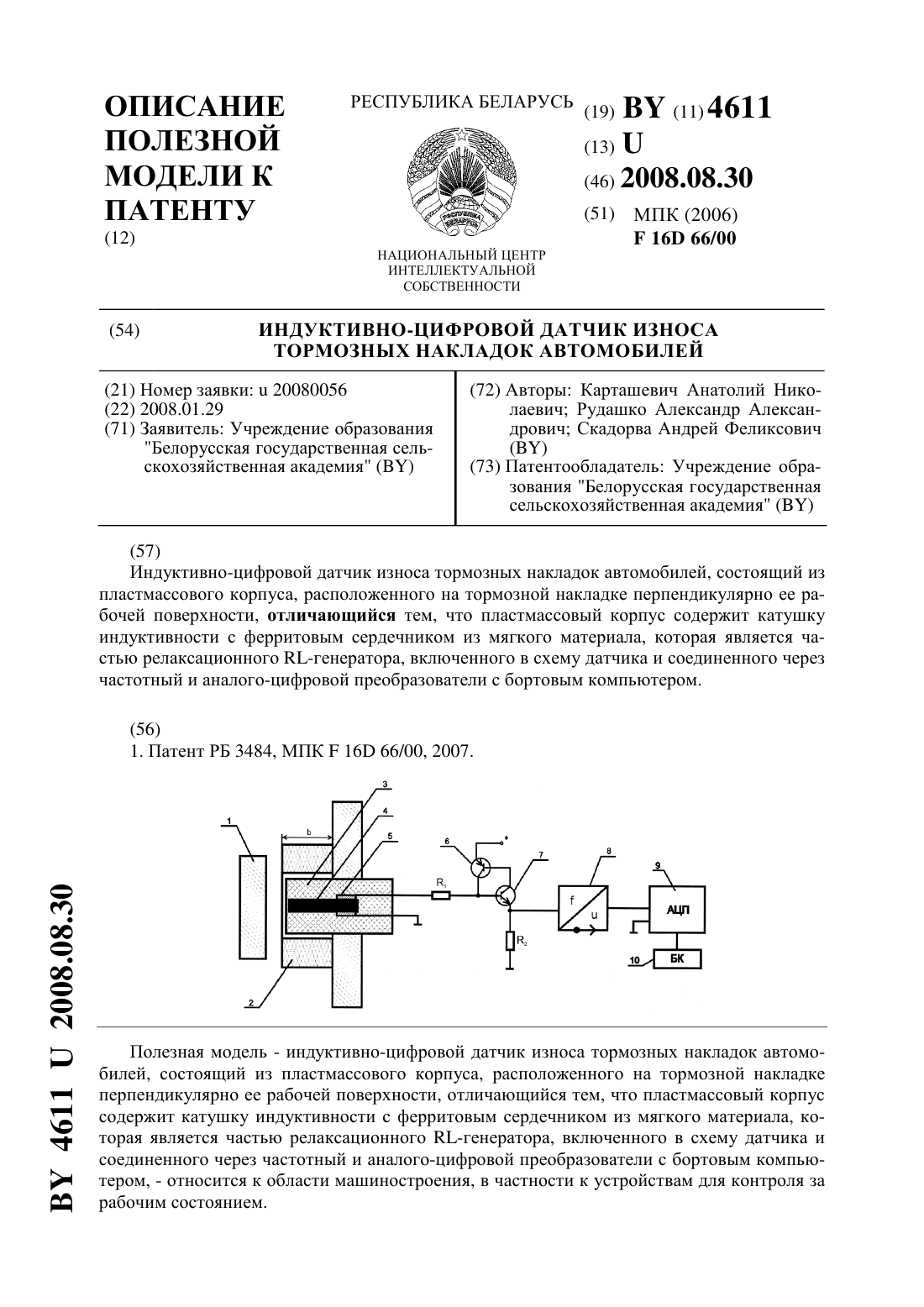
...катушку индуктивности, резисторы 1 и 2 и два транзистора, частотный и аналого-цифровой преобразователи и бортовой компьютер. На фигуре представлена схема индуктивно-цифрового датчика износа тормозных накладок автомобилей. Схема индуктивно-цифрового датчика износа тормозных накладок автомобилей состоит из тормозного диска 1 и тормозной накладки 2, пластмассового корпуса 3, расположенного на тормозной накладке перпендикулярно ее рабочей...
Способ и устройство для измерения параметров емкостного двухполюсника, измерительный блок, способ калибровки измерительного блока
Номер патента: 8496
Опубликовано: 30.10.2006
Авторы: Шляхтин Алексей Владимирович, Молочников Виктор Викторович, Хоняк Сергей Валентинович, Чуевский Олег Филиппович, Пожиток Игорь Константинович, Бардиян Елена Ивановна, Лихачев Павел Александрович
МПК: G01R 27/26
Метки: блока, калибровки, измерения, измерительного, параметров, измерительный, способ, двухполюсника, устройство, блок, емкостного
Текст:
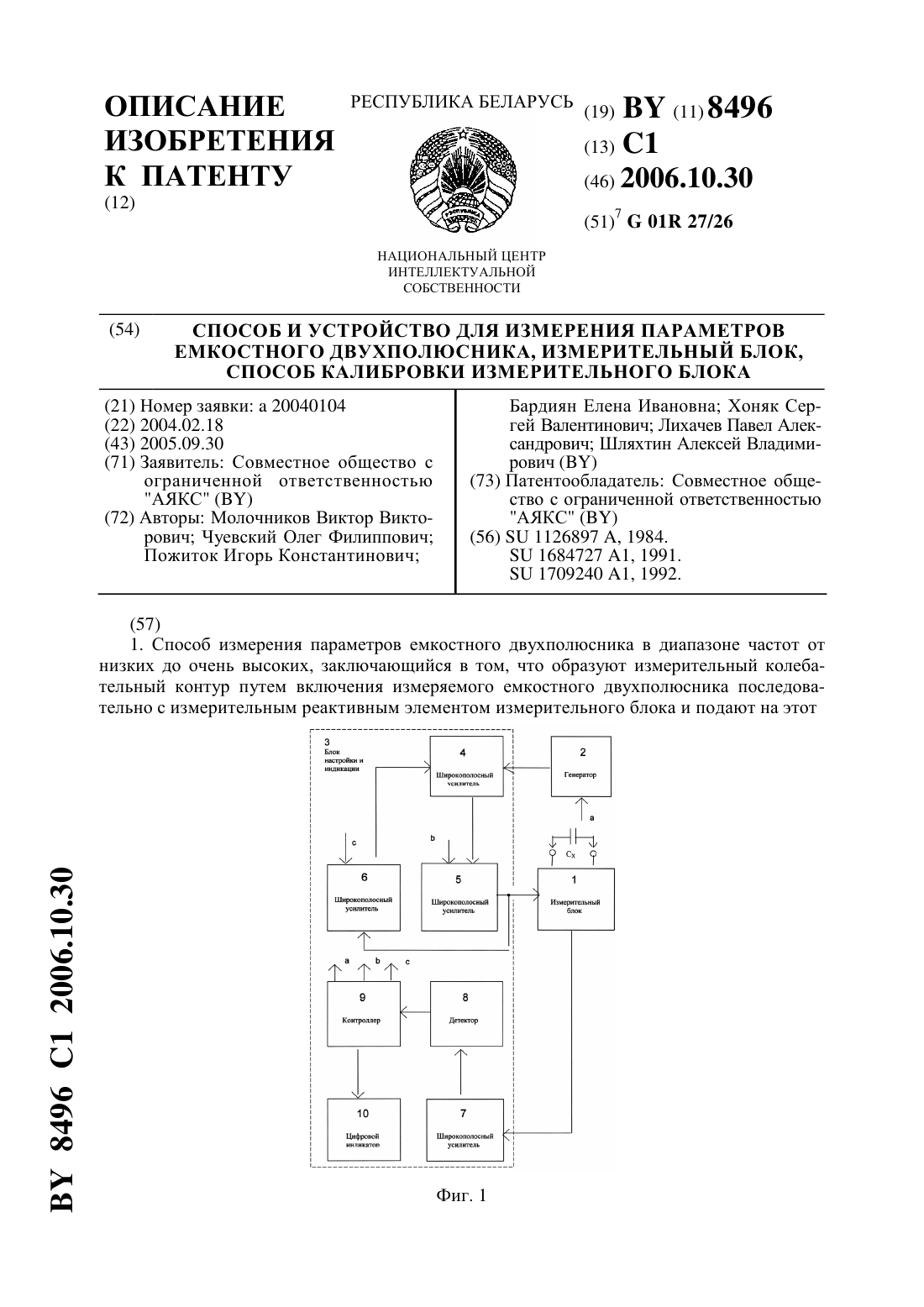
...для заявляемого способа является величина упомянутой расстройки в пределах (0,1-0,3) от напряжения в контуре при резонансе. Согласно изобретению, в устройстве для осуществления вышеописанного способа измерения параметров емкостного двухполюсника, содержащем измерительный блок (1) с клеммами для подключения измеряемого двухполюсника, генератор (2) сигнала возбуждения измерительного блока (1), блок (3) настройки и индикации...
Датчик давления
Номер патента: U 230
Опубликовано: 30.03.2001
Авторы: Довгяло Дмитрий Александрович, Бурдин Сергей Максимович, Рымарев Виталий Анатольевич
МПК: G01L 9/14
Текст:
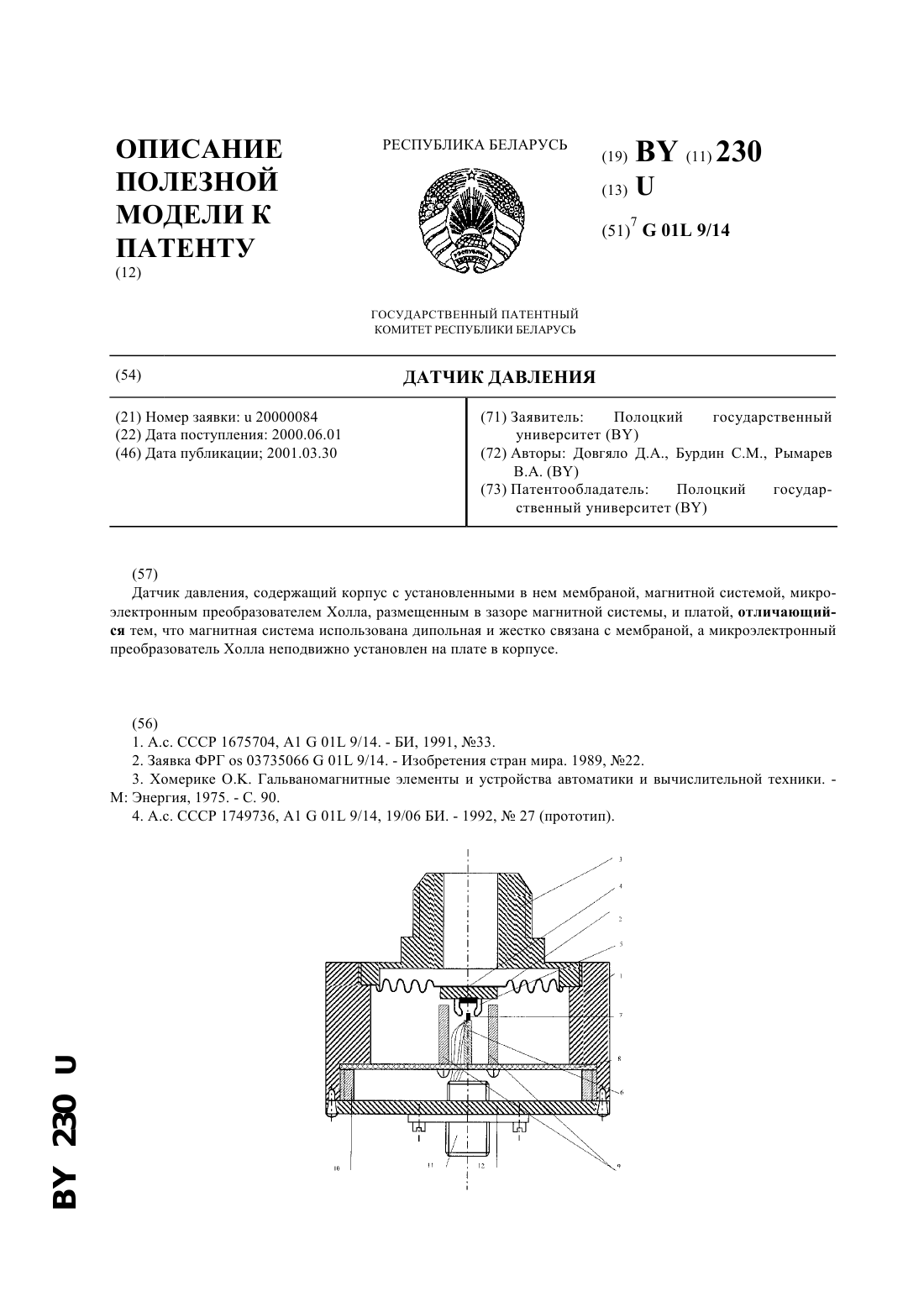
...кольцо, расположенное снаружи разделительной трубки и закрепленное в упругом центрирующем подвесе, с которым связан электрический измерительный преобразователь, выполненный в виде двух датчиков Холла, размещенных в зазоре магнита. В данной конструкции возникают погрешности,связанные с наличием передаточных элементов, что значительно увеличивает погрешность измерений. Кроме того, в конструкции применяется два постоянных магнита....
Устройство для определения механических характеристик металлических изделий
Номер патента: U 3299
Опубликовано: 28.02.2007
Авторы: Рабцевич Александр Владимирович, Мацулевич Олег Владимирович, Рудницкий Валерий Аркадьевич
МПК: G01N 3/52
Метки: характеристик, металлических, изделий, механических, определения, устройство
Текст:
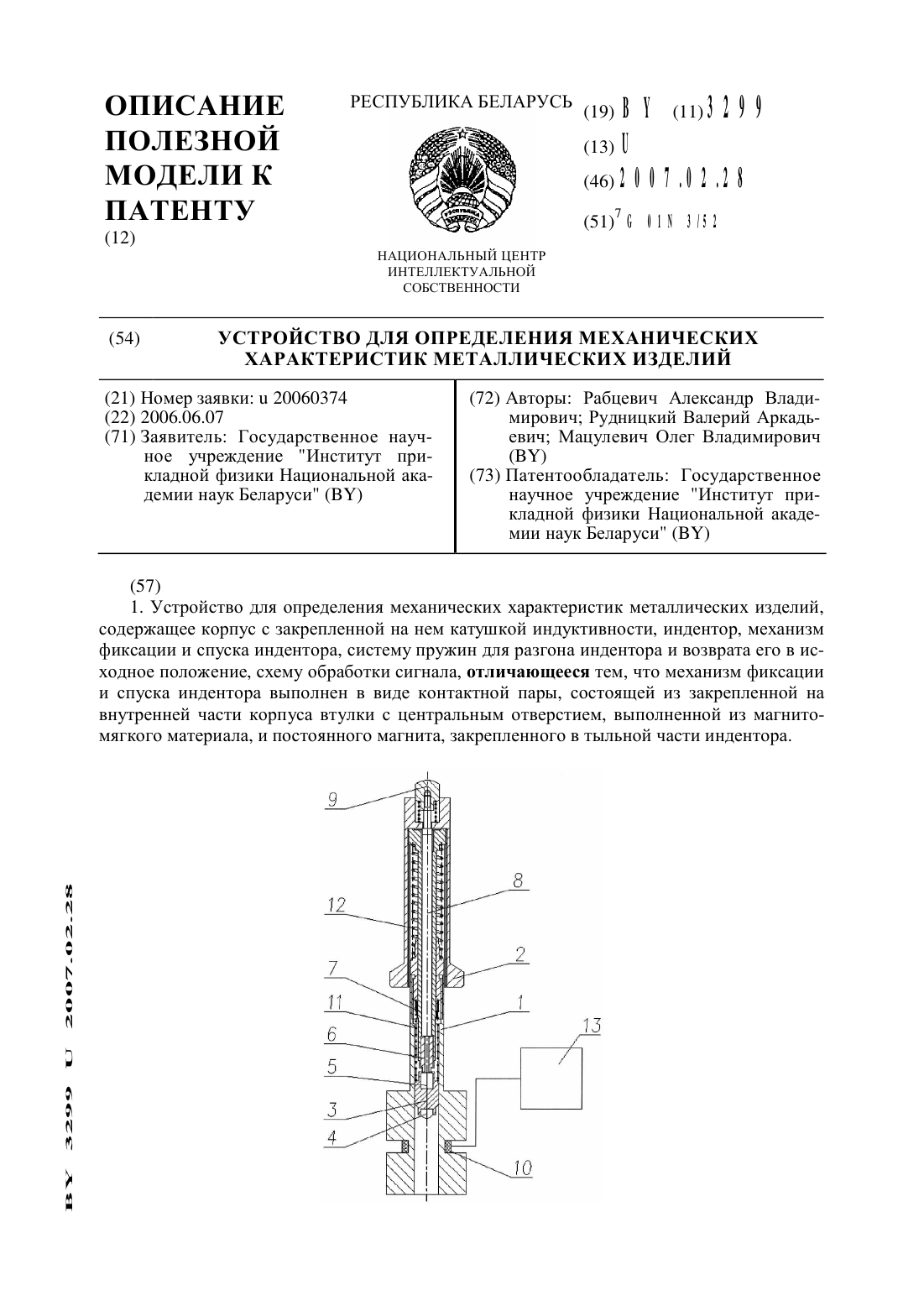
...длительной эксплуатации приводит к преждевременному выходу устройства из строя.Задачей полезной модели является увеличение стабильности и долговечности механизма спуска и фиксации. Сущность полезной модели, содержащей корпус с закрепленной на нем катушкой индуктивности, индентор, механизм фиксации и спуска индентора,систему пружин для разгона индентора и возврата его в исходное положение и схему обработки сигнала, заключается в том, что...
Предыдущий патент: Воздухонагреватель
Следующий патент: Промежуточный ковш
Случайный патент: Устройство для интраоперационной фиксации кисти руки