Грузозахватное устройство
Номер патента: U 3875
Опубликовано: 30.10.2007
Авторы: Агейчик Валерий Александрович, Агейчик Михаил Валерьевич, Шило Иван Николаевич
Текст
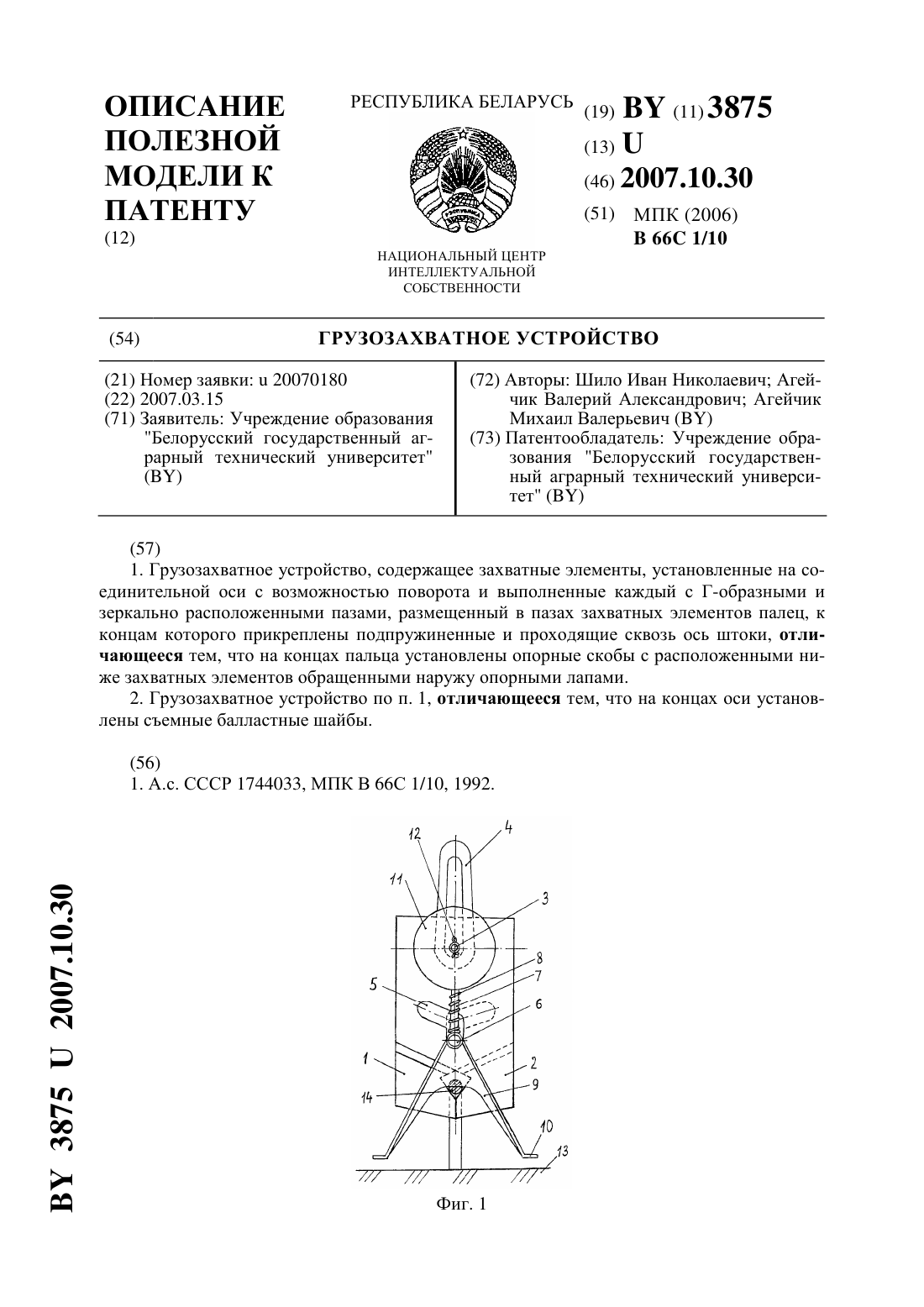
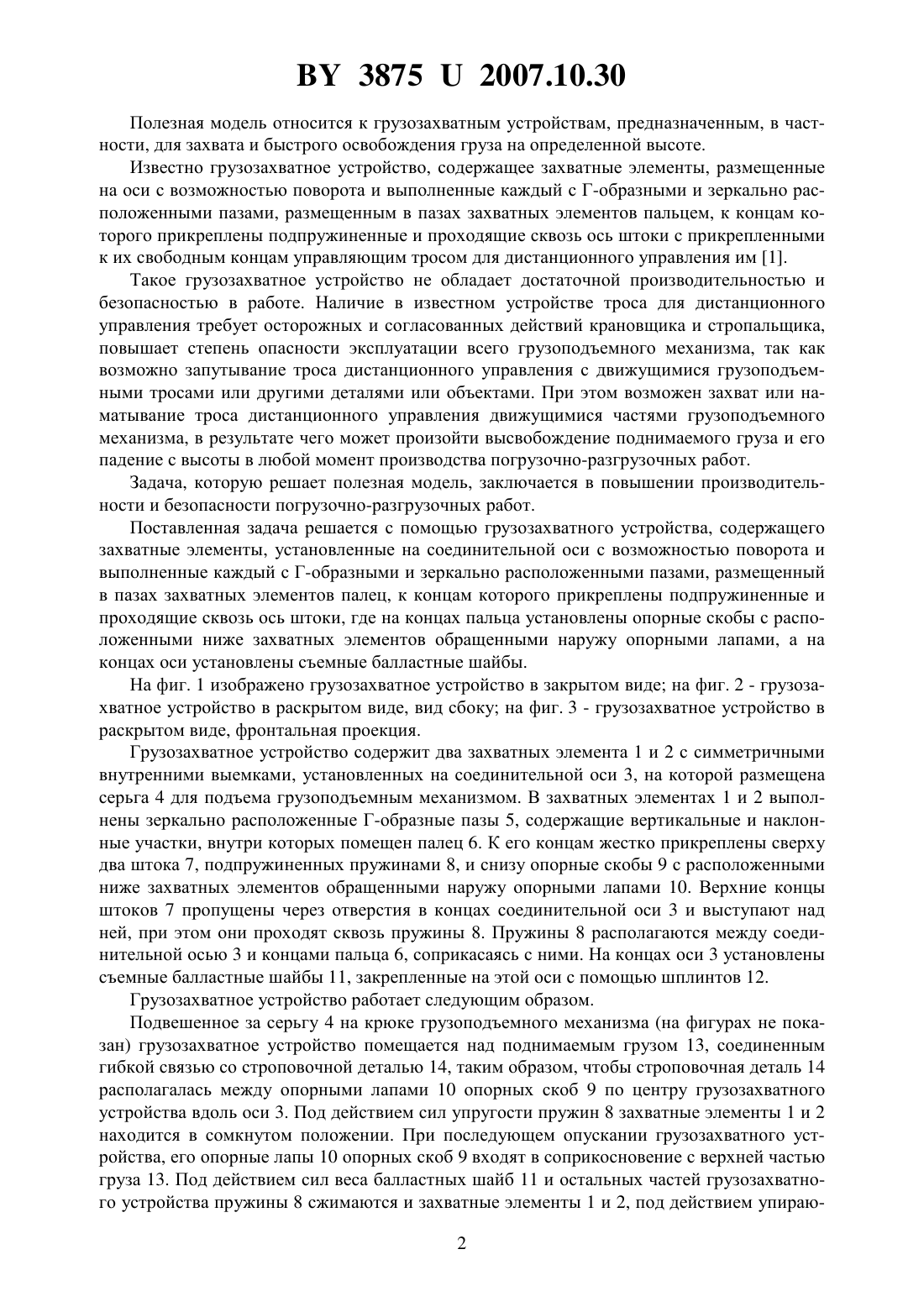
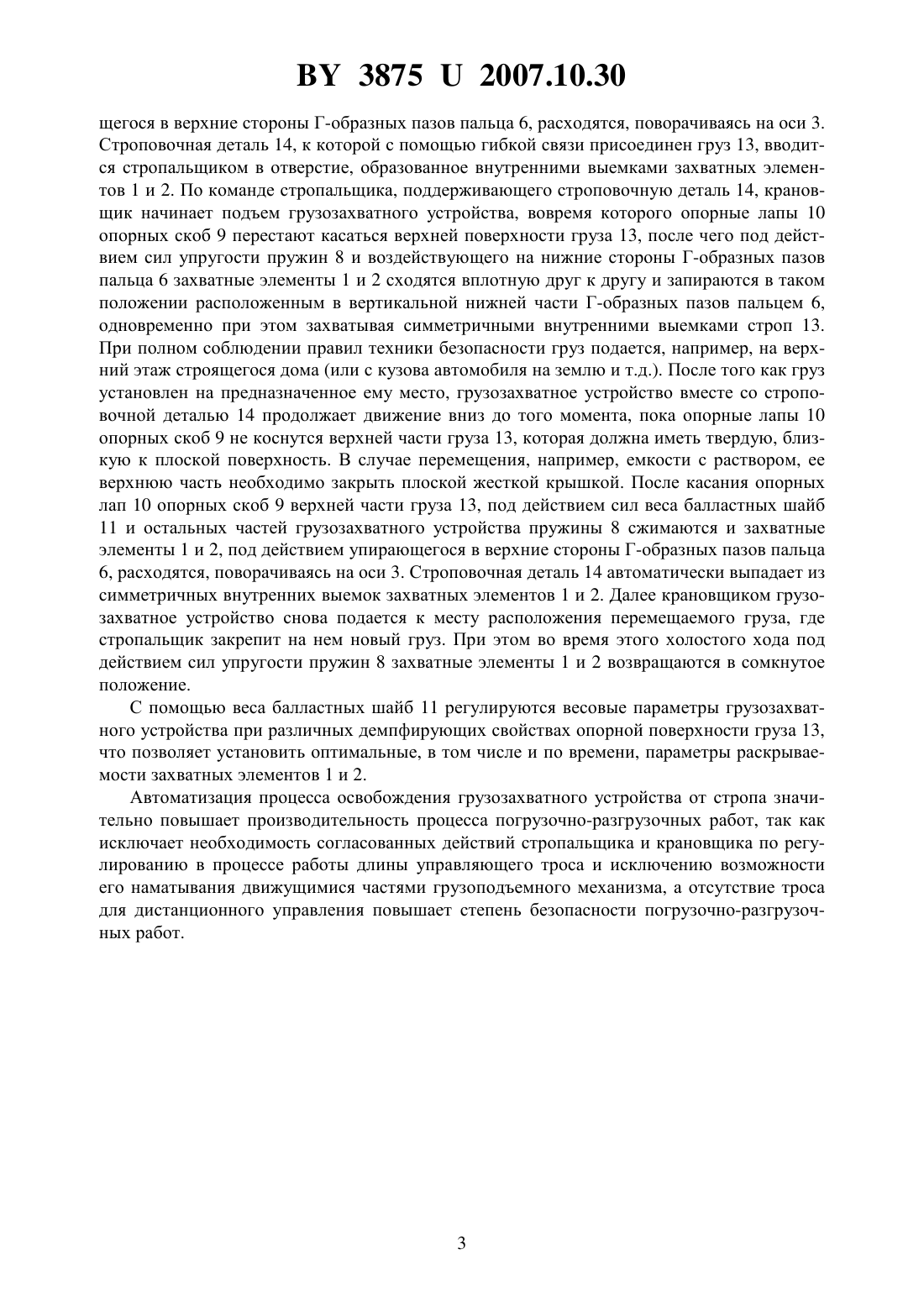
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Учреждение образования Белорусский государственный аграрный технический университет(72) Авторы Шило Иван Николаевич Агейчик Валерий Александрович Агейчик Михаил Валерьевич(73) Патентообладатель Учреждение образования Белорусский государственный аграрный технический университет(57) 1. Грузозахватное устройство, содержащее захватные элементы, установленные на соединительной оси с возможностью поворота и выполненные каждый с Г-образными и зеркально расположенными пазами, размещенный в пазах захватных элементов палец, к концам которого прикреплены подпружиненные и проходящие сквозь ось штоки, отличающееся тем, что на концах пальца установлены опорные скобы с расположенными ниже захватных элементов обращенными наружу опорными лапами. 2. Грузозахватное устройство по п. 1, отличающееся тем, что на концах оси установлены съемные балластные шайбы. 38752007.10.30 Полезная модель относится к грузозахватным устройствам, предназначенным, в частности, для захвата и быстрого освобождения груза на определенной высоте. Известно грузозахватное устройство, содержащее захватные элементы, размещенные на оси с возможностью поворота и выполненные каждый с Г-образными и зеркально расположенными пазами, размещенным в пазах захватных элементов пальцем, к концам которого прикреплены подпружиненные и проходящие сквозь ось штоки с прикрепленными к их свободным концам управляющим тросом для дистанционного управления им 1. Такое грузозахватное устройство не обладает достаточной производительностью и безопасностью в работе. Наличие в известном устройстве троса для дистанционного управления требует осторожных и согласованных действий крановщика и стропальщика,повышает степень опасности эксплуатации всего грузоподъемного механизма, так как возможно запутывание троса дистанционного управления с движущимися грузоподъемными тросами или другими деталями или объектами. При этом возможен захват или наматывание троса дистанционного управления движущимися частями грузоподъемного механизма, в результате чего может произойти высвобождение поднимаемого груза и его падение с высоты в любой момент производства погрузочно-разгрузочных работ. Задача, которую решает полезная модель, заключается в повышении производительности и безопасности погрузочно-разгрузочных работ. Поставленная задача решается с помощью грузозахватного устройства, содержащего захватные элементы, установленные на соединительной оси с возможностью поворота и выполненные каждый с Г-образными и зеркально расположенными пазами, размещенный в пазах захватных элементов палец, к концам которого прикреплены подпружиненные и проходящие сквозь ось штоки, где на концах пальца установлены опорные скобы с расположенными ниже захватных элементов обращенными наружу опорными лапами, а на концах оси установлены съемные балластные шайбы. На фиг. 1 изображено грузозахватное устройство в закрытом виде на фиг. 2 - грузозахватное устройство в раскрытом виде, вид сбоку на фиг. 3 - грузозахватное устройство в раскрытом виде, фронтальная проекция. Грузозахватное устройство содержит два захватных элемента 1 и 2 с симметричными внутренними выемками, установленных на соединительной оси 3, на которой размещена серьга 4 для подъема грузоподъемным механизмом. В захватных элементах 1 и 2 выполнены зеркально расположенные Г-образные пазы 5, содержащие вертикальные и наклонные участки, внутри которых помещен палец 6. К его концам жестко прикреплены сверху два штока 7, подпружиненных пружинами 8, и снизу опорные скобы 9 с расположенными ниже захватных элементов обращенными наружу опорными лапами 10. Верхние концы штоков 7 пропущены через отверстия в концах соединительной оси 3 и выступают над ней, при этом они проходят сквозь пружины 8. Пружины 8 располагаются между соединительной осью 3 и концами пальца 6, соприкасаясь с ними. На концах оси 3 установлены съемные балластные шайбы 11, закрепленные на этой оси с помощью шплинтов 12. Грузозахватное устройство работает следующим образом. Подвешенное за серьгу 4 на крюке грузоподъемного механизма (на фигурах не показан) грузозахватное устройство помещается над поднимаемым грузом 13, соединенным гибкой связью со строповочной деталью 14, таким образом, чтобы строповочная деталь 14 располагалась между опорными лапами 10 опорных скоб 9 по центру грузозахватного устройства вдоль оси 3. Под действием сил упругости пружин 8 захватные элементы 1 и 2 находится в сомкнутом положении. При последующем опускании грузозахватного устройства, его опорные лапы 10 опорных скоб 9 входят в соприкосновение с верхней частью груза 13. Под действием сил веса балластных шайб 11 и остальных частей грузозахватного устройства пружины 8 сжимаются и захватные элементы 1 и 2, под действием упираю 2 38752007.10.30 щегося в верхние стороны Г-образных пазов пальца 6, расходятся, поворачиваясь на оси 3. Строповочная деталь 14, к которой с помощью гибкой связи присоединен груз 13, вводится стропальщиком в отверстие, образованное внутренними выемками захватных элементов 1 и 2. По команде стропальщика, поддерживающего строповочную деталь 14, крановщик начинает подъем грузозахватного устройства, вовремя которого опорные лапы 10 опорных скоб 9 перестают касаться верхней поверхности груза 13, после чего под действием сил упругости пружин 8 и воздействующего на нижние стороны Г-образных пазов пальца 6 захватные элементы 1 и 2 сходятся вплотную друг к другу и запираются в таком положении расположенным в вертикальной нижней части Г-образных пазов пальцем 6,одновременно при этом захватывая симметричными внутренними выемками строп 13. При полном соблюдении правил техники безопасности груз подается, например, на верхний этаж строящегося дома (или с кузова автомобиля на землю и т.д.). После того как груз установлен на предназначенное ему место, грузозахватное устройство вместе со строповочной деталью 14 продолжает движение вниз до того момента, пока опорные лапы 10 опорных скоб 9 не коснутся верхней части груза 13, которая должна иметь твердую, близкую к плоской поверхность. В случае перемещения, например, емкости с раствором, ее верхнюю часть необходимо закрыть плоской жесткой крышкой. После касания опорных лап 10 опорных скоб 9 верхней части груза 13, под действием сил веса балластных шайб 11 и остальных частей грузозахватного устройства пружины 8 сжимаются и захватные элементы 1 и 2, под действием упирающегося в верхние стороны Г-образных пазов пальца 6, расходятся, поворачиваясь на оси 3. Строповочная деталь 14 автоматически выпадает из симметричных внутренних выемок захватных элементов 1 и 2. Далее крановщиком грузозахватное устройство снова подается к месту расположения перемещаемого груза, где стропальщик закрепит на нем новый груз. При этом во время этого холостого хода под действием сил упругости пружин 8 захватные элементы 1 и 2 возвращаются в сомкнутое положение. С помощью веса балластных шайб 11 регулируются весовые параметры грузозахватного устройства при различных демпфирующих свойствах опорной поверхности груза 13,что позволяет установить оптимальные, в том числе и по времени, параметры раскрываемости захватных элементов 1 и 2. Автоматизация процесса освобождения грузозахватного устройства от стропа значительно повышает производительность процесса погрузочно-разгрузочных работ, так как исключает необходимость согласованных действий стропальщика и крановщика по регулированию в процессе работы длины управляющего троса и исключению возможности его наматывания движущимися частями грузоподъемного механизма, а отсутствие троса для дистанционного управления повышает степень безопасности погрузочно-разгрузочных работ. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: B66C 1/10
Метки: грузозахватное, устройство
Код ссылки
<a href="https://by.patents.su/4-u3875-gruzozahvatnoe-ustrojjstvo.html" rel="bookmark" title="База патентов Беларуси">Грузозахватное устройство</a>
Грузозахватное устройство
Номер патента: U 3469
Опубликовано: 30.04.2007
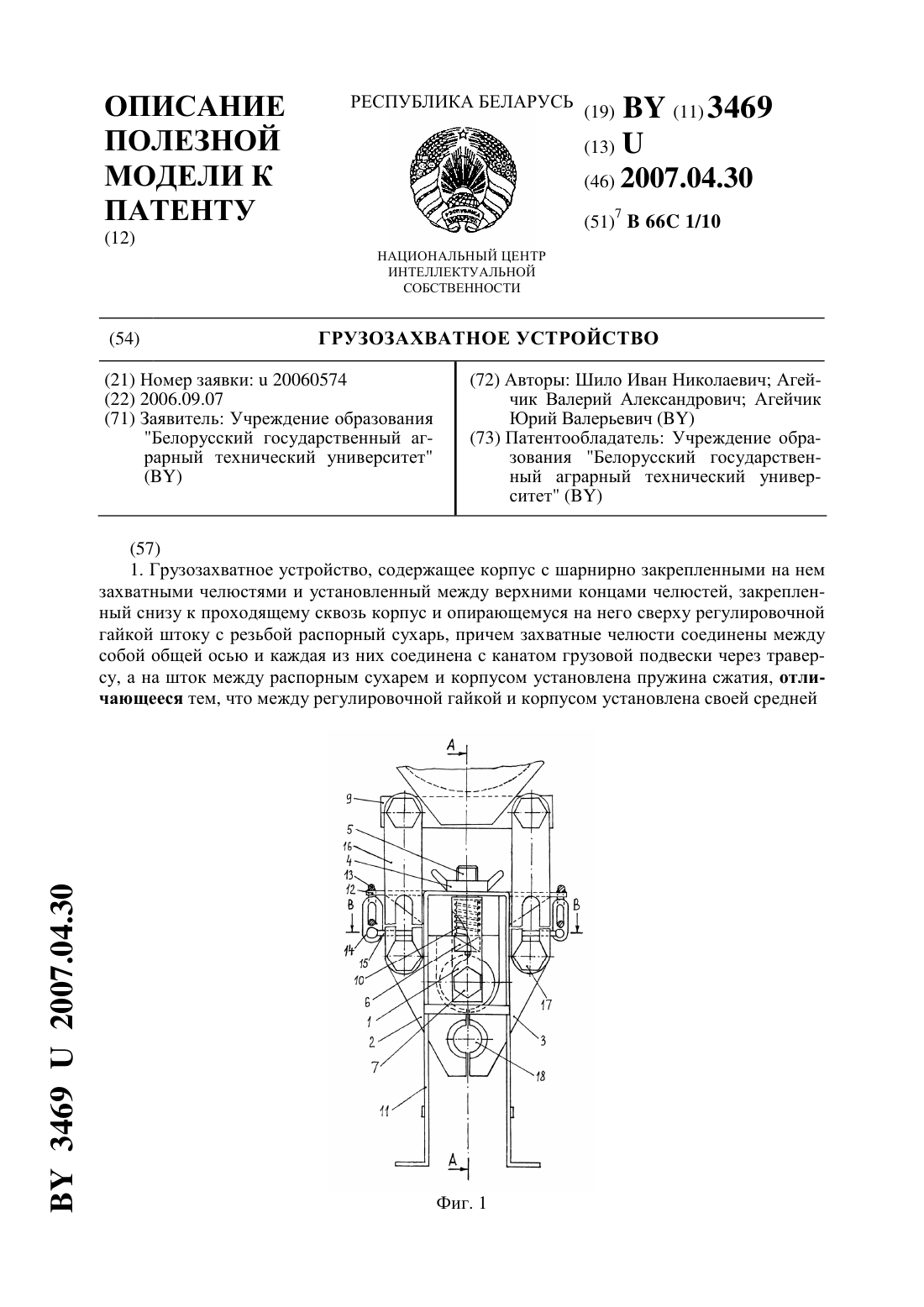
Авторы: Шило Иван Николаевич, Агейчик Валерий Александрович, Агейчик Юрий Валерьевич
МПК: B66C 1/10
Метки: устройство, грузозахватное
Текст:
...захватных челюстей жестко закреплены консольные планки, с жестко закрепленными на каждой из них вертикально и плоскостью перпендикулярно плоскости челюстей за пределами их горизонтальных проекций по одному звену сварной цепи, внутрь которых установлены своей вертикальной прорезью по замкнутой скобе, нижние части которых шарнирно закреплены на консолях, прикрепленных к ближайшим захватным челюстям, а каждая захватная челюсть соединена...
Грузозахватное устройство
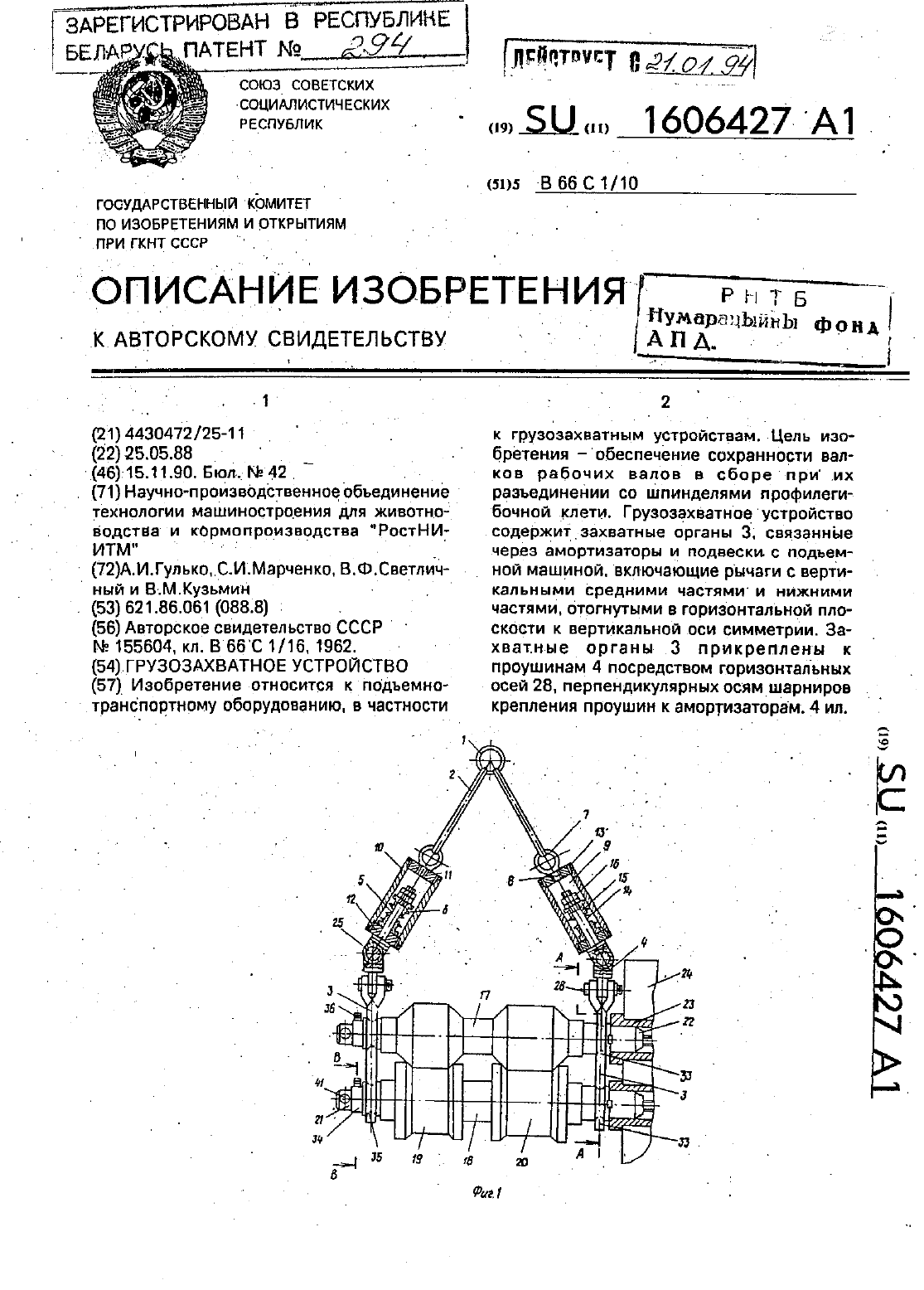
Номер патента: 294
Опубликовано: 30.12.1994
Авторы: Гулько А. И., Светличный В. Ф., Кузьмин В. М., Марченко С. И.
МПК: B66C 1/10
Метки: устройство, грузозахватное
Текст:
...на них валками в сборе.В положении захвата при зажатых рабочих валах 17 и 18 рычаги 26 и 27 фиксированы междусобой установочными штырями 32 для переноса обоих рабочих валов 17 и 18 в сборе с места смены валков в местоустановки в кассете (не показано). Для фиксации рабочих валов 17 и 18 между собой и удер жания захватных рычагов 26 и 27 в зафикси рованном положении на рабочих валах вместах захвата с базовой стороны выполне- ны...
Грузозахватное устройство для лежащего в ряд груза
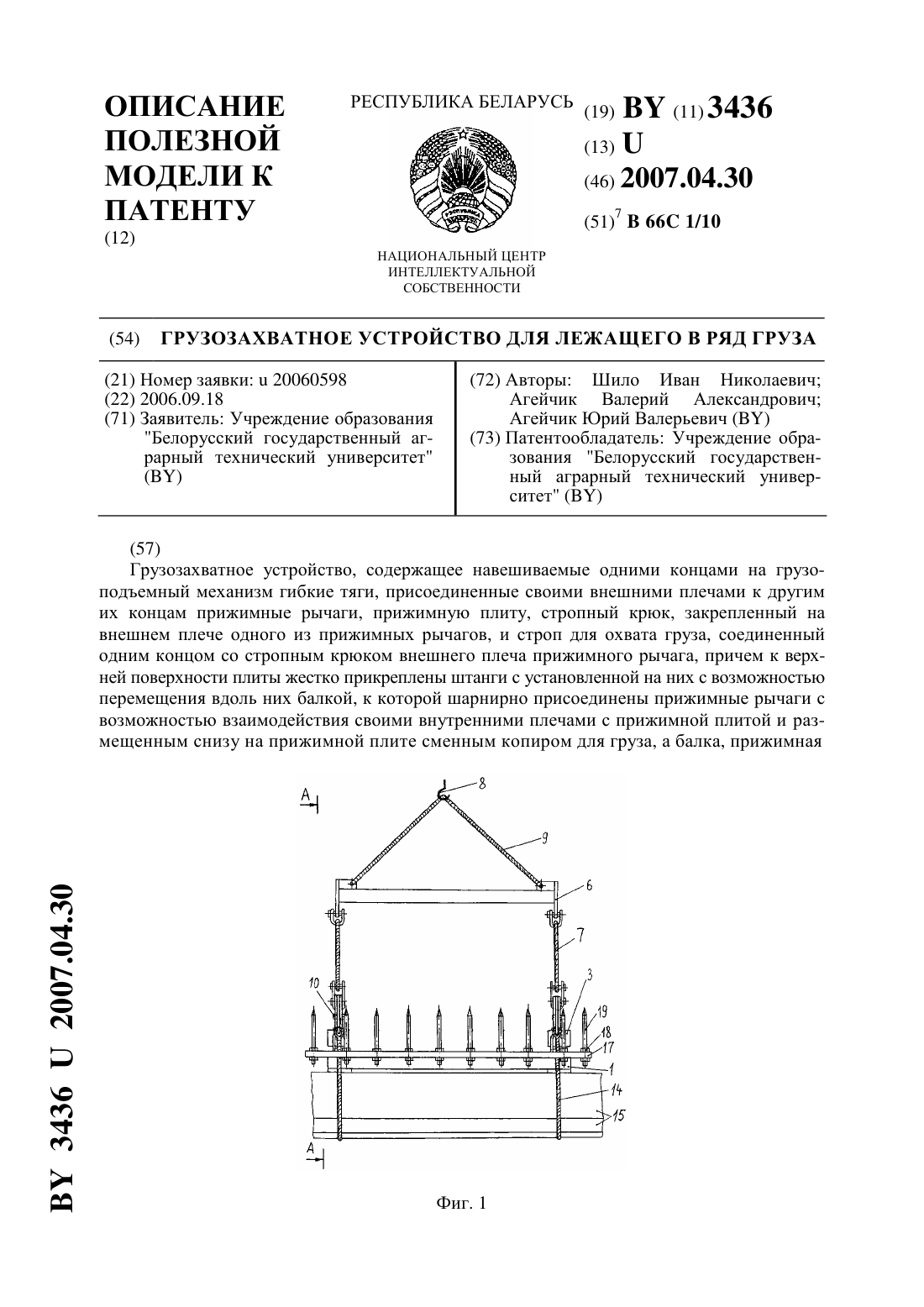
Номер патента: U 3436
Опубликовано: 30.04.2007
Авторы: Агейчик Валерий Александрович, Шило Иван Николаевич, Агейчик Юрий Валерьевич
МПК: B66C 1/10
Метки: лежащего, ряд, устройство, грузозахватное, груза
Текст:
...вверх, а на противоположной пластине стороне к верхней части прижимной плиты напротив балок закреплены две скобы с размерами, позволяющими присоединение к каждой из них одновременно двух стропных крюков. На фиг. 1 показан общий вид грузозахватного устройства на фиг. 2 - разрез А-А на фиг. 1 на фиг. 3 - разрез В-В на фиг. 2 на фиг. 4 - разрез С-С на фиг. 3 на фиг. 5 - разрез Д-Д на фиг. 2 на фиг. 6 - схема установки плиты с пластиной с...
Захватное устройство для штучных грузов
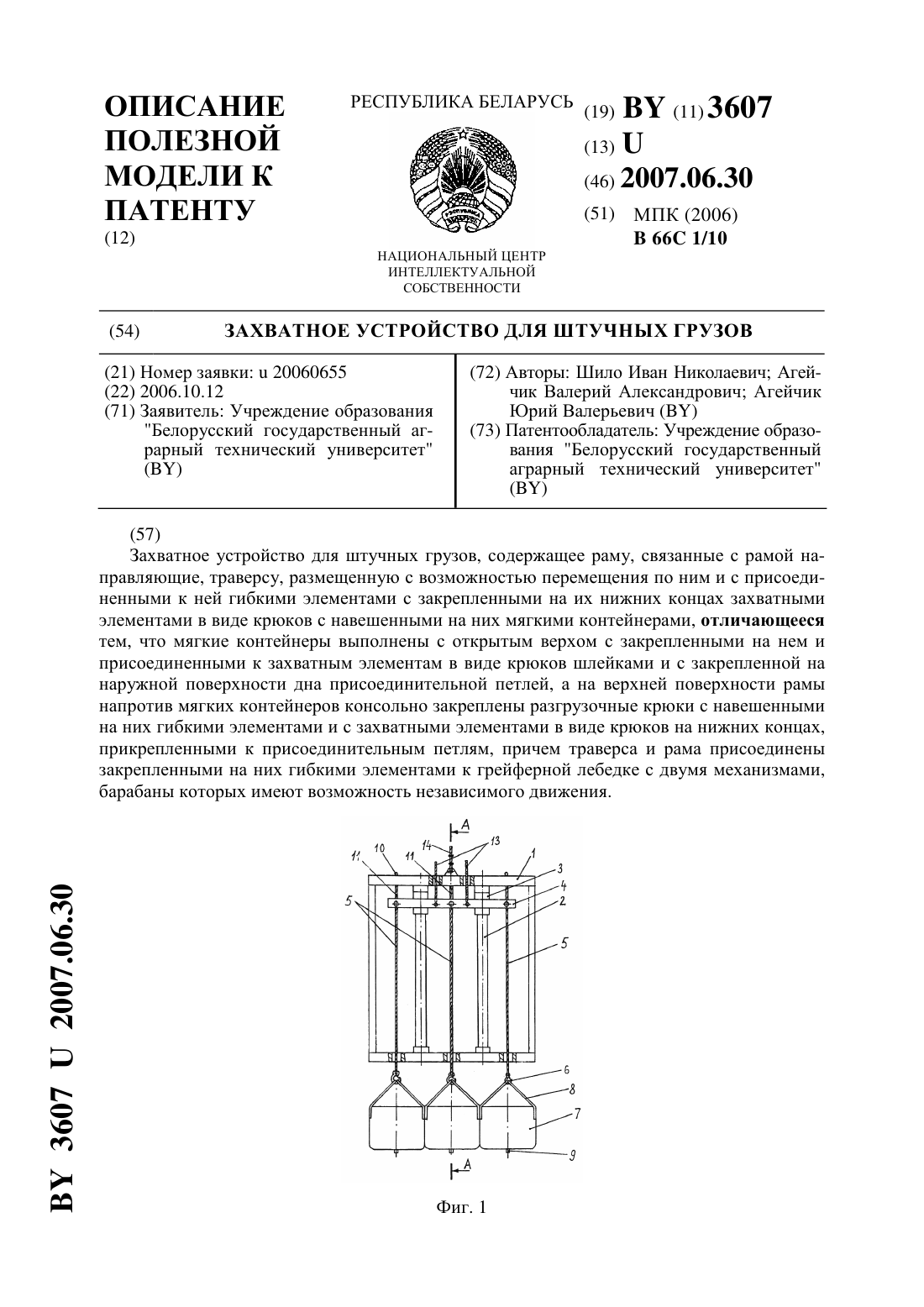
Номер патента: U 3607
Опубликовано: 30.06.2007
Авторы: Агейчик Юрий Валерьевич, Шило Иван Николаевич, Агейчик Валерий Александрович
МПК: B66C 1/10
Метки: грузов, устройство, штучных, захватное
Текст:
...затрат. Поставленная задача решается с помощью захватного устройства для штучных грузов,содержащего раму, связанные с рамой направляющие, траверсу, размещенную с возможностью перемещения по ним и с присоединенными к ней гибкими элементами с закрепленными на их нижних концах захватными элементами в виде крюков с навешенными на них мягкими контейнерами, где мягкие контейнеры выполнены с открытым верхом с закрепленными на нем и...
Захватный орган грузозахватного устройства
Номер патента: U 3434
Опубликовано: 30.04.2007
Авторы: Агейчик Юрий Валерьевич, Агейчик Валерий Александрович, Шило Иван Николаевич
МПК: B66C 1/10
Метки: орган, устройства, захватный, грузозахватного
Текст:
...грузов с различными диаметрами горизонтальных отверстий, в которые он вставляется. Поставленная задача решается с помощью захватного органа грузозахватного устройства, содержащего фигурный двуплечий рычаг, одно плечо которого выполнено с упорным выступом для взаимодействия с грузом и крюком для кинематической связи с подъемной машиной, а другое плечо выполнено с зацепом для груза, причем он снабжен размещенным в отверстии груза корпусом с...
Предыдущий патент: Ударно-центробежная дробилка
Следующий патент: Барабан для намотки каната при сдвоенном полиспасте
Случайный патент: Способ разработки пологого пласта полезного ископаемого