Прецизионный датчик положения ротора для вентильных электродвигателей
Номер патента: U 1430
Опубликовано: 30.06.2004
Авторы: Литовко Владимир Иосифович, Шафранский Валентин Иванович

Текст
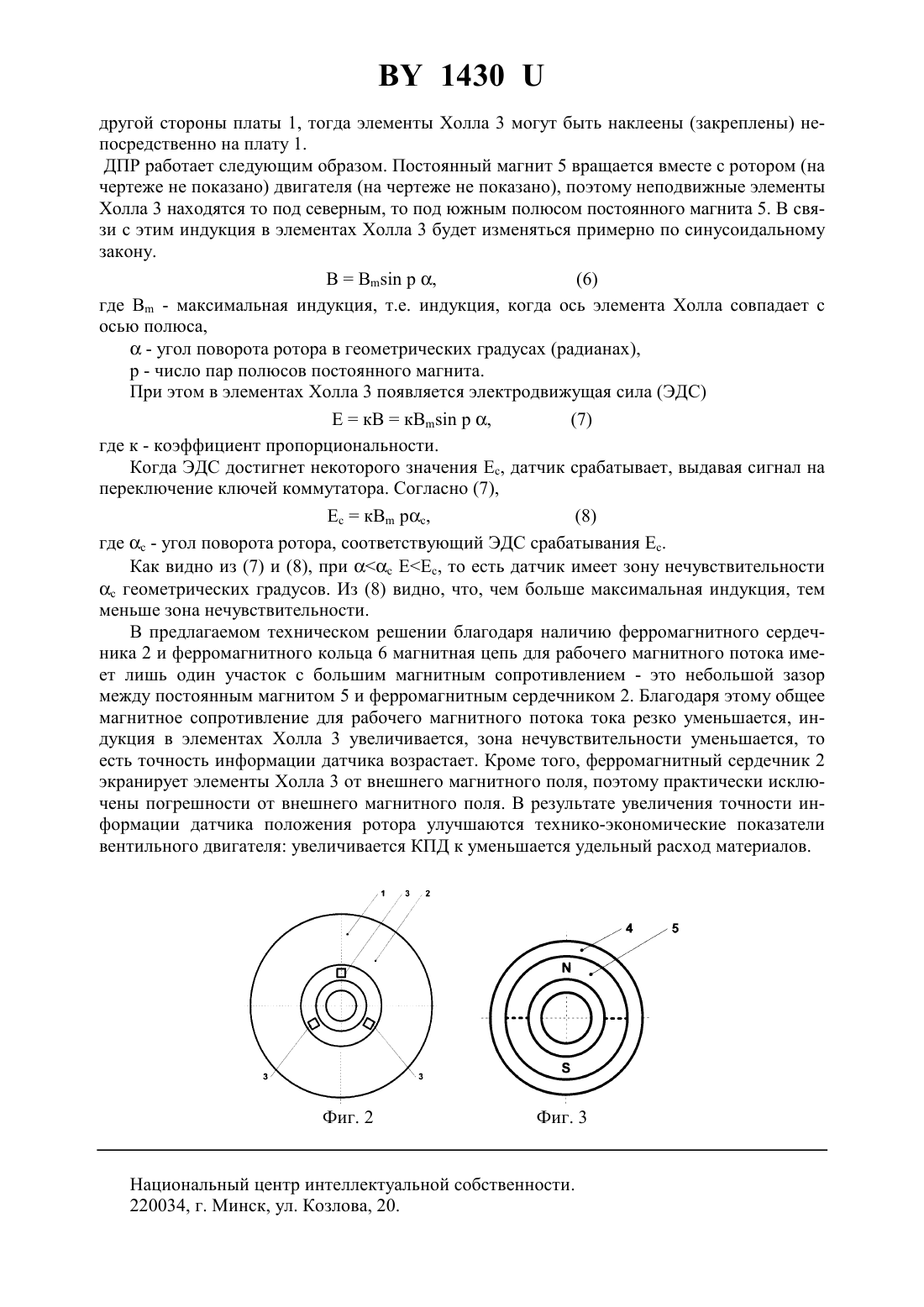
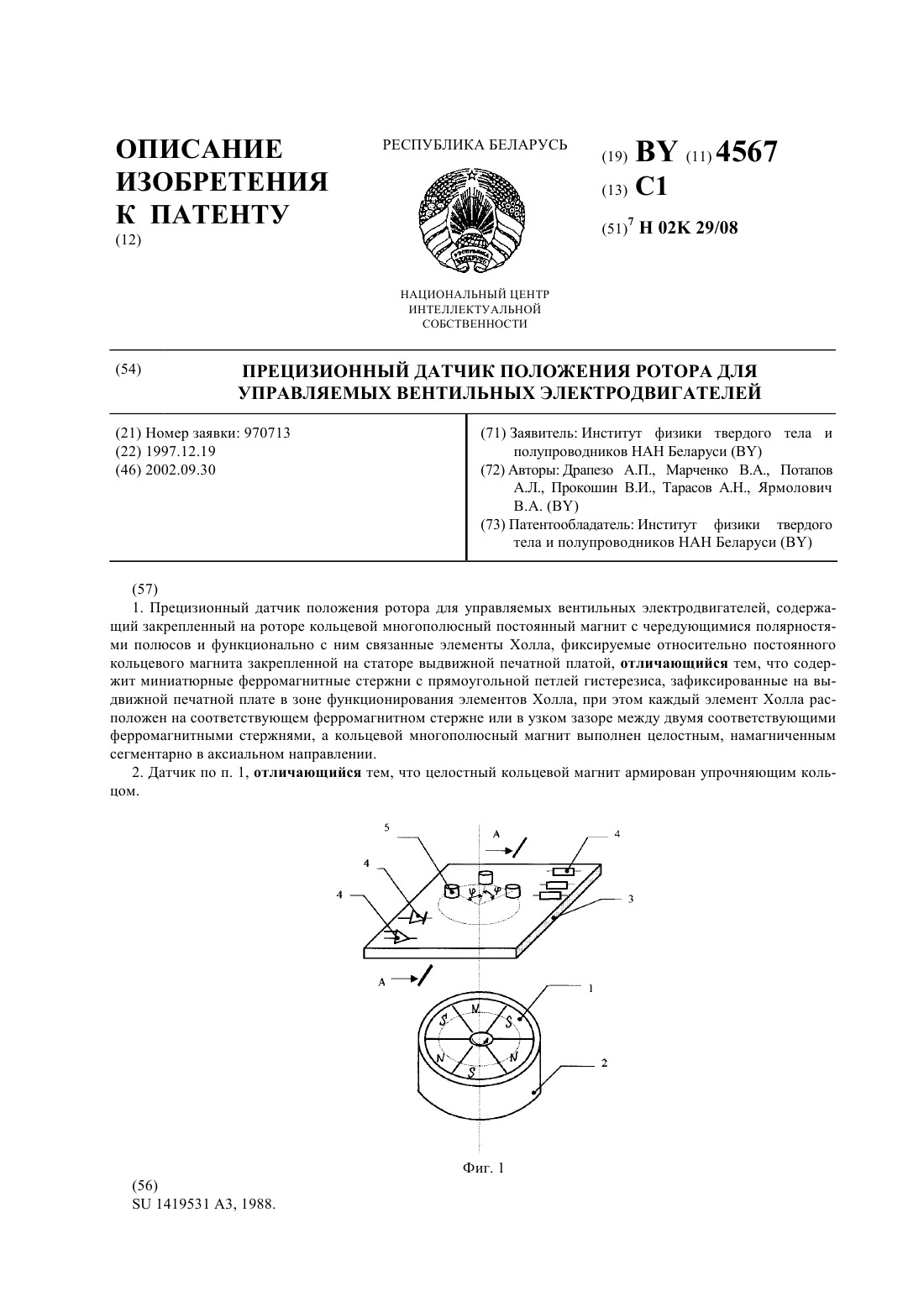
НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ПРЕЦИЗИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА ДЛЯ ВЕНТИЛЬНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ(71) Заявитель РУП Приборостроительный завод ОПТРОН(72) Авторы Шафранский Валентин Иванович Литовко Владимир Иосифович(73) Патентообладатель РУП Приборостроительный завод ОПТРОН(57) 1. Прецизионный датчик положения ротора для вентильных электродвигателей, содержащий кольцевой многополюсный постоянный магнит, намагниченный сегментарно в аксиальном направлении и закрепленный на роторе в немагнитной обойме, а также элементы Холла с ферромагнитным сердечником, размещенные на печатной плате, закрепленной на статоре вблизи одного из торцов постоянного магнита, отличающийся тем, что к другому торцу кольцевого постоянного магнита прикреплено ферромагнитное кольцо, а элементы Холла снабжены общим для них ферромагнитным сердечником. 2. Прецизионный датчик положения ротора для вентильных электродвигателей по п. 1,отличающийся тем, что элементы Холла размещены на поверхности платы, обращенной к постоянному магниту, а общий для них ферромагнитный сердечник - на противоположной поверхности платы.(56) 1. А.с. СССР 1419531, МПК Н 02 К/08, 1988. 2. Патент РБ 4567, МПК Н 02 К 29/08. 3. Юферов Ф.М. Электрические машины автоматических устройств. - М. Высшая школа, 1976. - С. 196 (прототип). Полезная модель относится к области электрических машин с датчиком положения ротора. Она может быть использована в вентильных электродвигателях. Известен датчик положения ротора (ДПР), в котором его ротор выполнен в форме диска 1. На нем размещены постоянные магниты в виде кольцевых сегментов. Эти магниты расположены так, что рабочие поверхности полюсов, следуя друг за другом по окружности, образуют чередующуюся полярность. Элементы Холла закреплены в отверстиях изолирующей пластины, установленной на статоре. Основной недостаток этого ДПР наличие неконтролируемого разброса ширины немагнитных участков между магнитами, в результате чего не возможно точное позиционирование ротора с помощью элементов Холла. Известен ДПР, содержащий кольцевой многополюсный постоянный магнит, закрепленный на роторе, и элементы Холла, установленные на неподвижной плате вблизи одного из торцов постоянного магнита 2. Постоянный магнит намагничен сегментарно в аксиальном направлении и размещен в немагнитной обойме для его защиты от разрушения. Каждый элемент Холла расположен на своем миниатюрном ферромагнитном сердечнике в виде стержня. В этом ДПР магнитный поток элемента Холла замыкается в основном по участкам с большим магнитным сопротивлением, поэтому индукция в нем сравнительно мала. Следовательно, выходная характеристика (зависимость электродвижущей силы(ЭДС) в элементе Холла от угла поворота ротора) имеет малую крутизну. Так как сигнал управления формируется при переходе ЭДС через нуль, то возникает зона нечувствительности тем большая, чем меньше крутизна выходной характеристики датчика. Это является причиной его погрешности. Техническая задача, решаемая полезной моделью, - увеличение точности информации датчика положения ротора, что способствует увеличению коэффициента полезного действия (КПД) и уменьшению удельного расхода материалов на электродвигатель. Поставленная задача решается тем, что в прецизионном датчике положения ротора для вентильных электродвигателей, содержащем установленный на роторе в немагнитной обойме кольцевой многополюсный постоянный магнит, намагниченный сегментарно в аксиальном направлении, а также закрепленную на статоре плату с ферромагнитными сердечниками, на которых размещены элементы Холла, обращенные рабочей поверхностью к одному из торцев постоянного магнита, к другому торцу этого магнита прикреплено ферромагнитное кольцо. Элементы Холла расположены на одном, общем для них, ферромагнитном сердечнике. Ферромагнитные кольцо и сердечник, имеющие ничтожно малое магнитное сопротивление, создают магнитную цепь для замыкания рабочего магнитного потока от одного полюса постоянного магнита к другому. Благодаря этому резко увеличивается индукция в элементах Холла, что приводит к увеличению крутизны их выходной характеристики, а следовательно, к увеличению точности информации ДПР. Этот эффект будет еще большим, если сердечник для элементов Холла выполнен из материала с прямоугольной петлей гистерезиса. Общий для элементов Холла ферромагнитный сердечник замыкает на себя постороннее магнитное поле, поэтому он защищает от посторонних помех, что также повышает точность информации ДПР. При возрастании точности информации ДПР увеличивается КПД и уменьшается удельный расход материалов для электродвигателя. Это можно доказать следующим образом. 2 1430 Вращающий момент электродвигателя 3 МсФ,(1) где с - коэффициент,Ф - магнитный поток ротора, - магнитодвижущая сила (МДС) статора, - угол между осями МДС и магнитного потока,МсФ - максимальный момент. В вентильном двигателе за один период происходит в общем случаепереключений(коммутаций), а за межкоммутационный период 2/ электрических радиан уголизменяется от некоторого значения 1 до 2. Следовательно, среднее значение момента Отсюда следует, что средний момент будет наибольший, если 2(5)2. 2 2 При увеличении точности ДПР возрастает точность выполнения (5), следовательно, и (4). Как видно из (3), в этом случае увеличивается средний момент М при неизменных МДС и магнитном потоке, то есть расход материалов на единицу момента уменьшается. Так как МДС пропорциональна току двигателя, то потребляемая из сети мощность пропорциональна МДС. Мощность на валу пропорциональна среднему моменту, поэтому его увеличение благодаря возрастанию точности ДПР приводит к увеличению мощности на валу при неизменной потребляемой мощности, то есть к увеличению КПД. На фиг. 1 изображена конструктивная схема ДПР. На фиг. 2 показан вид платы с элементами Холла со стороны постоянного магнита. На фиг. 3 - вид кольцевого постоянного магнита со стороны платы для двухполюсного двигателя. ДПР содержит плату 1 из электроизоляционного материала, закрепленную на статоре(на чертеже не показано), ферромагнитный сердечник 2 с размещенными на нем элементами Холла 3, обойму 4 из немагнитного материала, в которой размещены кольцевой многополюсный аксиально намагниченный постоянный магнит 5 и ферромагнитное кольцо 6. Обойма 4 закреплена на роторе двигателя (на чертеже не показано). Число полюсов постоянного магнита 5 равно числу полюсов двигателя (на чертеже не показано), число элементов Холла 3 равно числу фаз электродвигателя. Элементы Холла 3 сдвинуты друг относительно друга на 120/ градусов ( - число пар полюсов двигателя). Наиболее целесообразная форма сердечника 2 - кольцо (или часть его), выполненное из материала с прямоугольной петлей гистерезиса или из другого ферромагнитного материала. При небольшой толщине платы 1 ферромагнитный сердечник 2 может быть установлен с 3 1430 другой стороны платы 1, тогда элементы Холла 3 могут быть наклеены (закреплены) непосредственно на плату 1. ДПР работает следующим образом. Постоянный магнит 5 вращается вместе с ротором (на чертеже не показано) двигателя (на чертеже не показано), поэтому неподвижные элементы Холла 3 находятся то под северным, то под южным полюсом постоянного магнита 5. В связи с этим индукция в элементах Холла 3 будет изменяться примерно по синусоидальному закону. В,(6) где В - максимальная индукция, т.е. индукция, когда ось элемента Холла совпадает с осью полюса, - угол поворота ротора в геометрических градусах (радианах), - число пар полюсов постоянного магнита. При этом в элементах Холла 3 появляется электродвижущая сила (ЭДС) ЕкВкВ,(7) где к - коэффициент пропорциональности. Когда ЭДС достигнет некоторого значения Е, датчик срабатывает, выдавая сигнал на переключение ключей коммутатора. Согласно (7),ЕкВ ,(8) где- угол поворота ротора, соответствующий ЭДС срабатывания Е. Как видно из (7) и (8), приЕ, то есть датчик имеет зону нечувствительностигеометрических градусов. Из (8) видно, что, чем больше максимальная индукция, тем меньше зона нечувствительности. В предлагаемом техническом решении благодаря наличию ферромагнитного сердечника 2 и ферромагнитного кольца 6 магнитная цепь для рабочего магнитного потока имеет лишь один участок с большим магнитным сопротивлением - это небольшой зазор между постоянным магнитом 5 и ферромагнитным сердечником 2. Благодаря этому общее магнитное сопротивление для рабочего магнитного потока тока резко уменьшается, индукция в элементах Холла 3 увеличивается, зона нечувствительности уменьшается, то есть точность информации датчика возрастает. Кроме того, ферромагнитный сердечник 2 экранирует элементы Холла 3 от внешнего магнитного поля, поэтому практически исключены погрешности от внешнего магнитного поля. В результате увеличения точности информации датчика положения ротора улучшаются технико-экономические показатели вентильного двигателя увеличивается КПД к уменьшается удельный расход материалов. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: H02K 29/08
Метки: датчик, вентильных, электродвигателей, прецизионный, положения, ротора
Код ссылки
<a href="https://by.patents.su/4-u1430-precizionnyjj-datchik-polozheniya-rotora-dlya-ventilnyh-elektrodvigatelejj.html" rel="bookmark" title="База патентов Беларуси">Прецизионный датчик положения ротора для вентильных электродвигателей</a>
Прецизионный датчик положения ротора для управляемых вентильных электродвигателей
Номер патента: 4567
Опубликовано: 30.09.2002
Авторы: Марченко Владимир Алексеевич, Прокошин Валерий Иванович, Драпезо Александр Петрович, Потапов Александр Львович, Тарасов Альберт Николаевич, Ярмолович Вячеслав Алексеевич
МПК: H02K 29/08
Метки: управляемых, положения, ротора, электродвигателей, датчик, прецизионный, вентильных
Текст:
...введение миниатюрных ферромагнитных стержней с ППГ в зону функционирования элемента Холла обеспечивает повышение крутизны выходной характеристики ДПР, обеспечивает формирование узкой зоны перехода величины индукции магнитного поля через нуль при перемещении секторов магнита от - к - или наоборот, что и приводит к повышению точности позиционирования ротора. Сопутствующим положительным дополнительным эффектом является увеличение прочностных...
Датчик положения якоря линейного шагового двигателя
Номер патента: 2427
Опубликовано: 30.09.1998
Автор: Трусов Николай Калистратович
МПК: G01R 33/07, H02K 29/08
Метки: положения, двигателя, линейного, шагового, датчик, якоря
Текст:
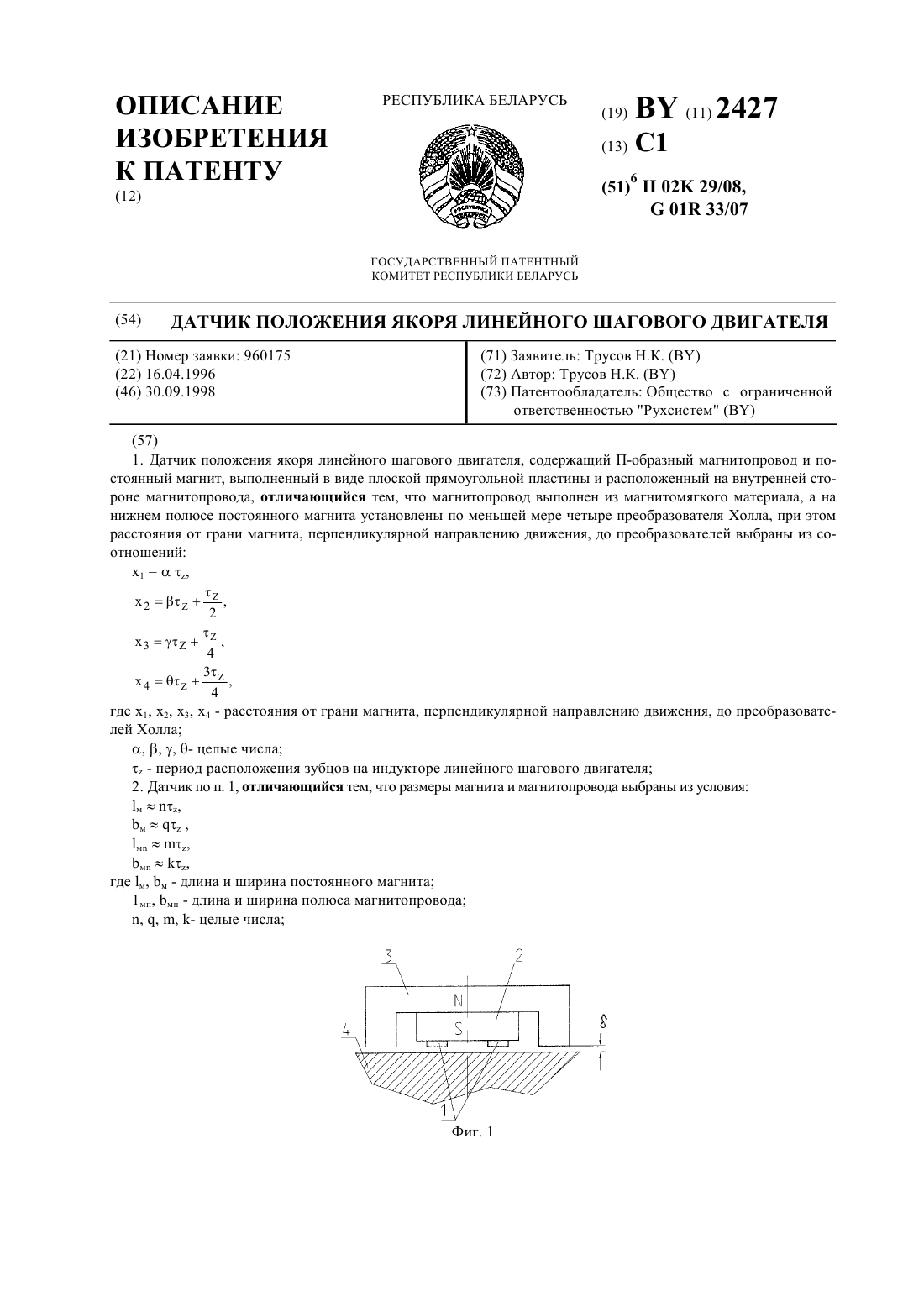
...1, 2, 3, 4 - расстояние от грани магнита, перпендикулярной направлению движения, до преобразователей Холла, , , - целые числа- период расположения зубцов на индукторе линейного шагового двигателя. Геометрические размеры магнита и магнитопровода выбраны из условий, что м,мп,мп. Здесь м, м - длина и ширина постоянного магнита мп , мп - длина и ширина полюса магнитопровода, , ,- целые числа. Кроме того, постоянный магнит выполнен из...
Датчик положения якоря планарного шагового двигателя
Номер патента: 2525
Опубликовано: 30.12.1998
Автор: Трусов Николай Калистратович
МПК: G01R 33/07, H02K 29/08
Метки: шагового, положения, датчик, двигателя, якоря, планарного
Текст:
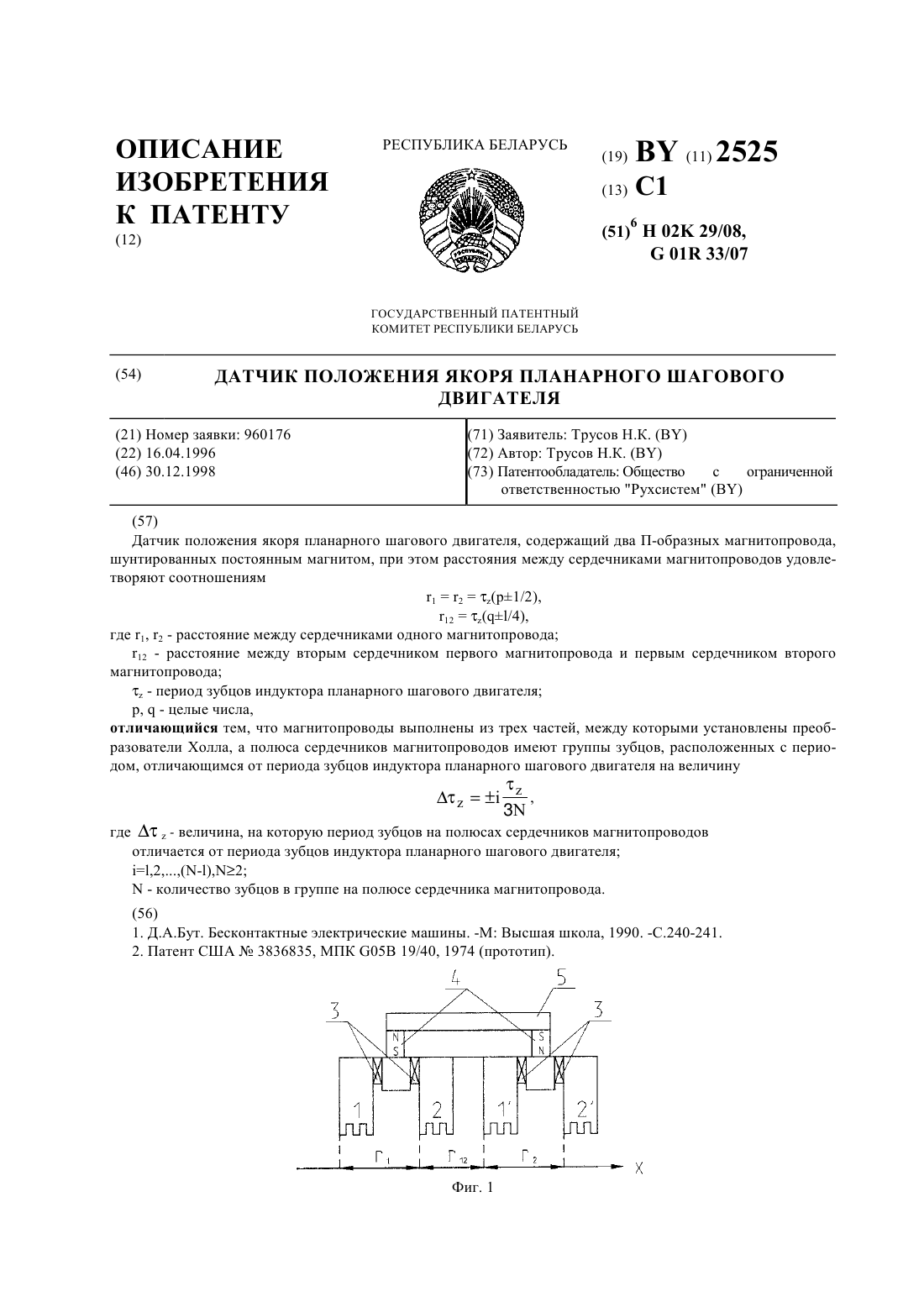
...2, (-1),2- количество зубцов в группе на полюсе сердечника магнитопровода. На фиг. 1 представлена принципиальная конструкция датчика положения планарного шагового двигателя на фиг. 2 - эквивалентная схема замещения датчика. Датчик положения планарного шагового двигателя выполнен из двух П-образных магнитопроводов, состоящих из трех частей, с соответственно сердечниками 1, 2 и 1, 2. На полюсах сердечников 1, 2 и 1, 2 имеются группы зубцов,...
Датчик положения якоря магнитоэлектрического шагового двигателя
Номер патента: 4649
Опубликовано: 30.09.2002
Авторы: Жарский Владимир Владимирович, Трусов Николай Калистратович
МПК: H02K 29/06, G01R 33/07, H02K 29/08...
Метки: положения, шагового, якоря, датчик, двигателя, магнитоэлектрического
Текст:
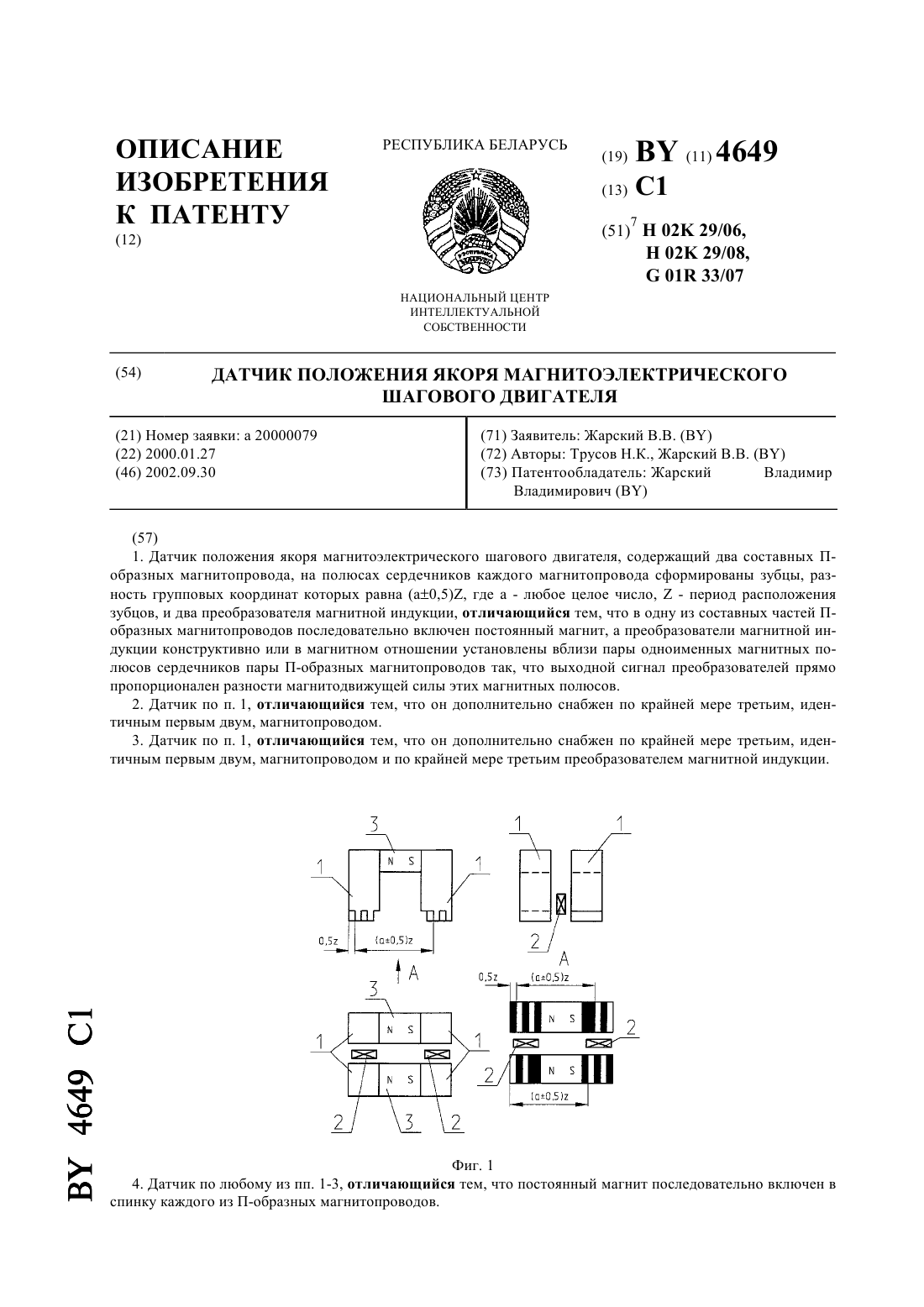
...схема замещения ДП с тремя магнитопроводами и круговая диаграмма, поясняющая его работу. На фиг. 10, фиг. 11 представлены принципиальные конструкции ДП для торцевых шаговых двигателей. Базовая конструкция датчика положения содержит два составных П-образных магнитопровода, в которых в одну из составных частей (на фиг. 1 - спинка (3), на фиг. 2 - сердечник (1 последовательно включен постоянный магнит 3. Два преобразователя 2 магнитной...
Датчик давления
Номер патента: 4468
Опубликовано: 30.06.2002
Автор: Довгяло Дмитрий Александрович
МПК: G01L 9/14
Текст:
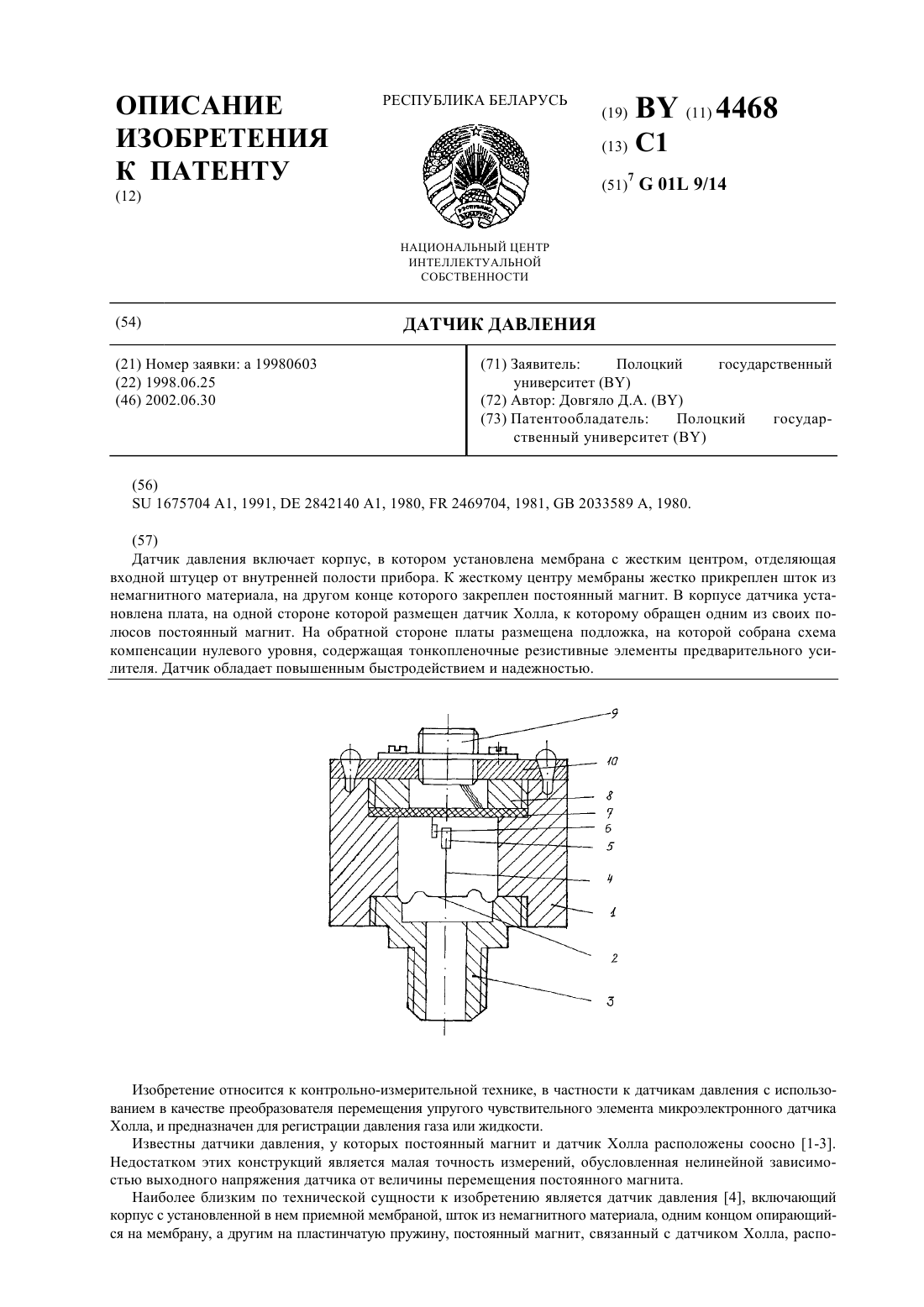
...и установленную в корпусе плату, на которой размещен датчик Холла, к которому обращен одним из своих полюсов постоянный магнит, в отличие от прототипа мембрана выполнена с жестким центром, к которому жестко прикреплен один конец штока, а на другом конце штока жестко закреплен постоянный магнит. Кроме того, в датчик введена схема компенсации нулевого уровня, состоящая из тонкопленочных резистивных элементов предварительного усилителя,...
Предыдущий патент: Устройство для смешивания
Следующий патент: Тара для напитков
Случайный патент: Устройство для определения размеров стандартной оттискной ложки