Датчик положения якоря магнитоэлектрического шагового двигателя
Номер патента: 4649
Опубликовано: 30.09.2002
Авторы: Жарский Владимир Владимирович, Трусов Николай Калистратович
Текст
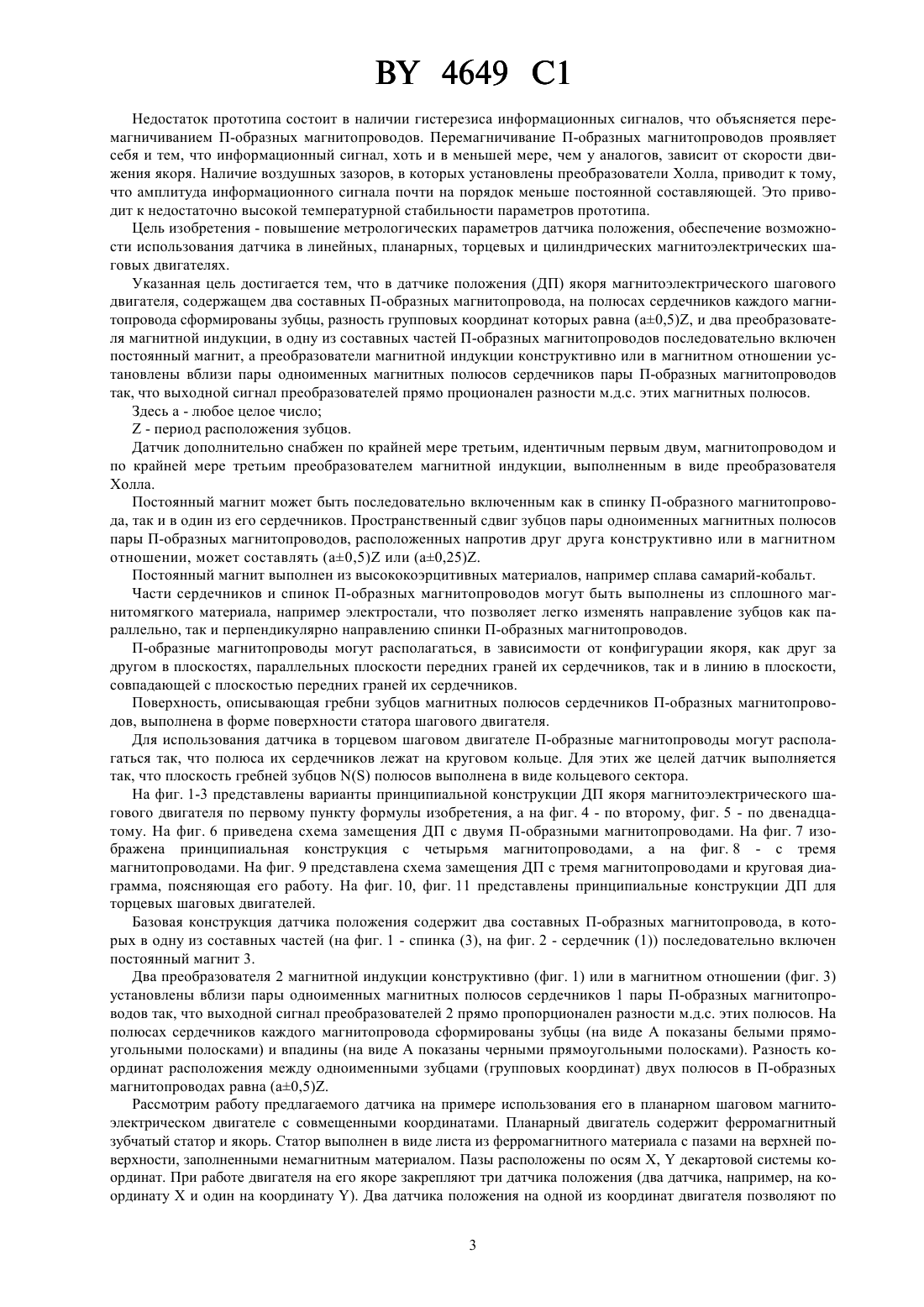
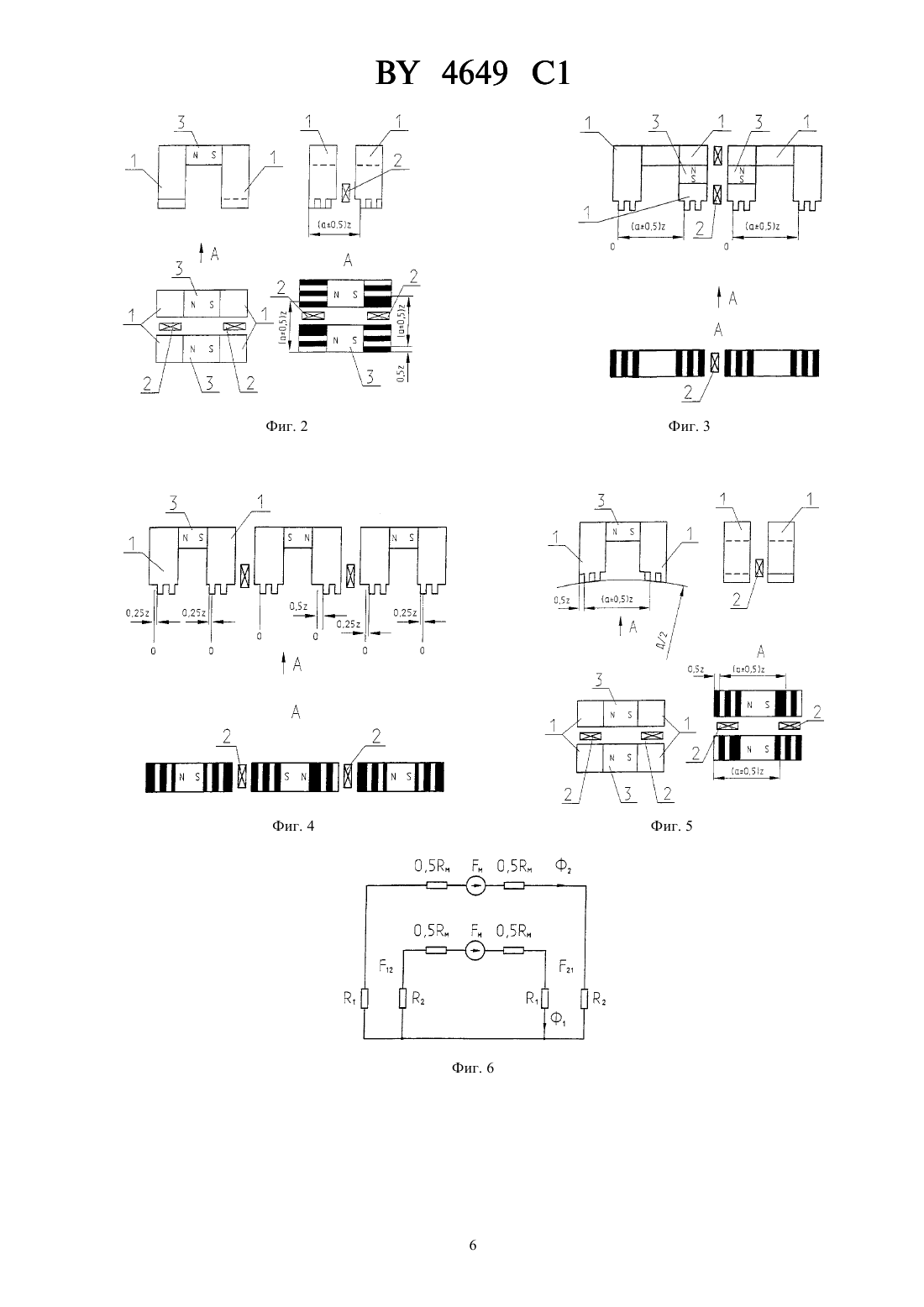
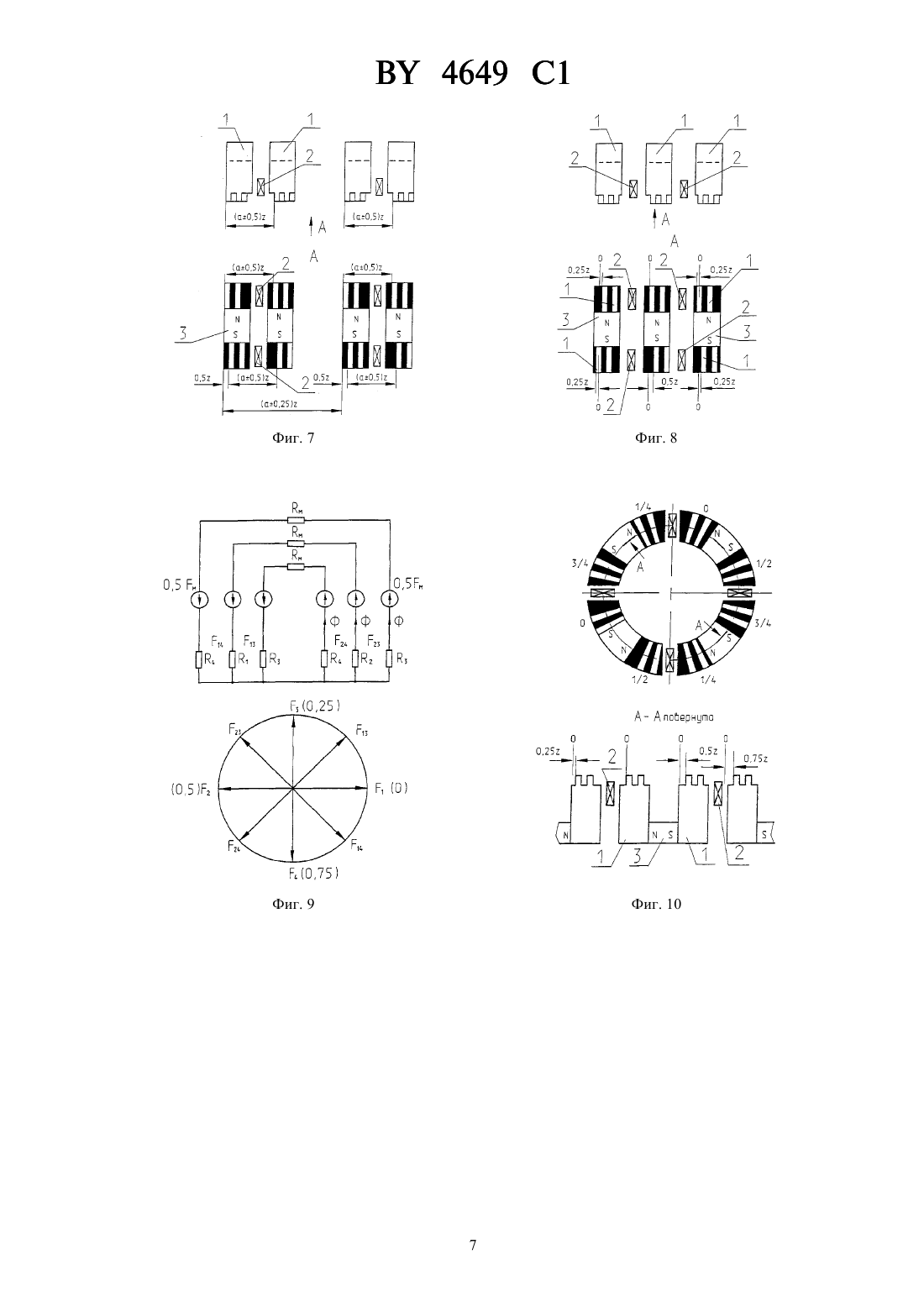
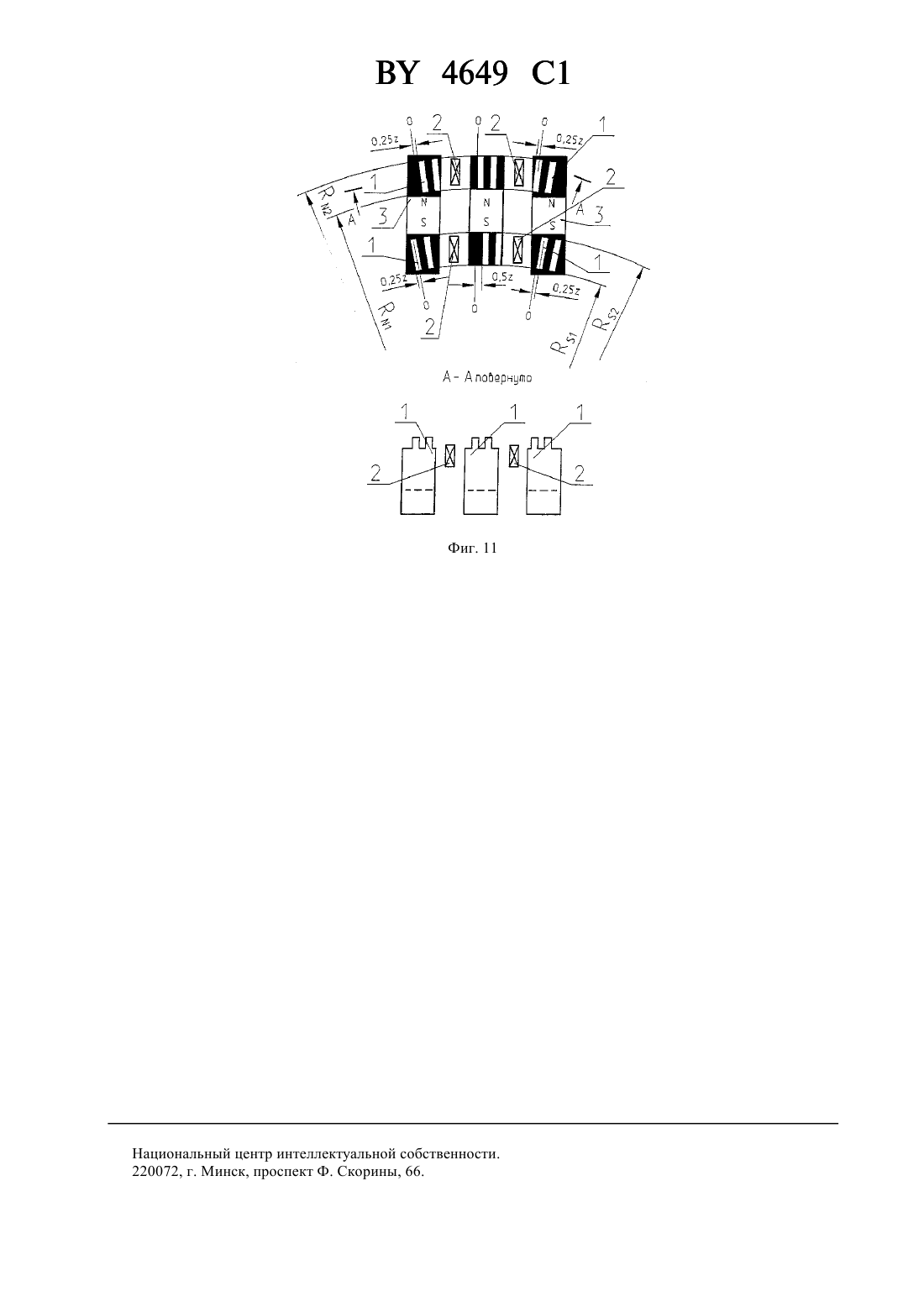
02 29/08, 01 33/07 НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ДАТЧИК ПОЛОЖЕНИЯ ЯКОРЯ МАГНИТОЭЛЕКТРИЧЕСКОГО ШАГОВОГО ДВИГАТЕЛЯ(73) Патентообладатель Жарский Владимир Владимирович(57) 1. Датчик положения якоря магнитоэлектрического шагового двигателя, содержащий два составных Побразных магнитопровода, на полюсах сердечников каждого магнитопровода сформированы зубцы, разность групповых координат которых равна (а 0,5), где а - любое целое число,- период расположения зубцов, и два преобразователя магнитной индукции, отличающийся тем, что в одну из составных частей Побразных магнитопроводов последовательно включен постоянный магнит, а преобразователи магнитной индукции конструктивно или в магнитном отношении установлены вблизи пары одноименных магнитных полюсов сердечников пары П-образных магнитопроводов так, что выходной сигнал преобразователей прямо пропорционален разности магнитодвижущей силы этих магнитных полюсов. 2. Датчик по п. 1, отличающийся тем, что он дополнительно снабжен по крайней мере третьим, идентичным первым двум, магнитопроводом. 3. Датчик по п. 1, отличающийся тем, что он дополнительно снабжен по крайней мере третьим, идентичным первым двум, магнитопроводом и по крайней мере третьим преобразователем магнитной индукции. Фиг. 1 4. Датчик по любому из пп. 1-3, отличающийся тем, что постоянный магнит последовательно включен в спинку каждого из П-образных магнитопроводов. 4649 1 5. Датчик по любому из пп. 1-3, отличающийся тем, что постоянный магнит последовательно включен в сердечник каждого из П-образных магнитопроводов. 6. Датчик по любому из пп. 1, 3-5, отличающийся тем, что пространственный сдвиг зубцов пары одноименных магнитных полюсов пары П-образных магнитопроводов, расположенных друг напротив друга,конструктивно или в магнитном отношении, составляет (а 0,5). 7. Датчик по любому из пп. 1-5, отличающийся тем, что пространственный сдвиг зубцов пары одноименных магнитных полюсов пары П-образных магнитопроводов, расположенных друг напротив друга,конструктивно или в магнитном отношении, составляет (а 0,25). 8. Датчик по любому из пп. 1-7, отличающийся тем, что постоянный магнит выполнен из высококоэрцитивного материала, преимущественно из сплава самарий-кобальт. 9. Датчик по любому из пп. 1-8, отличающийся тем, что части сердечников и спинок П-образных магнитопроводов выполнены из сплошного магнитомягкого материала, преимущественно электростали. 10. Датчик по любому из пп. 1-9, отличающийся тем, что направление зубцов полюсов выбрано параллельным направлению спинки П-образных магнитопроводов. 11. Датчик по любому из пп. 1-9, отличающийся тем, что направление зубцов выбрано перпендикулярным направлению спинки П-образных магнитопроводов. 12. Датчик по любому из пп. 1-11, отличающийся тем, что поверхность, описывающая гребни зубцов магнитных полюсов сердечников П-образных магнитопроводов, выполнена в форме поверхности статора шагового двигателя. 13. Датчик по любому из пп. 1-2, отличающийся тем, что П-образные магнитопроводы расположены друг за другом в плоскостях, параллельных плоскости передних граней их сердечников. 14. Датчик по п. 2, отличающийся тем, что П-образные магнитопроводы расположены в линию в плоскости, совпадающей с плоскостью передних граней их сердечников. 15. Датчик по п. 14, отличающийся тем, что П-образные магнитопроводы расположены так, что полюса их сердечников находятся на круговом кольце или круговом секторе. 16. Датчик по п. 13, отличающийся тем, что плоскость гребней зубцов - полюсов выполнена в виде кольцевого сектора, причем количество и линейные размеры зубцов выбраны из соотношения 22 - 21) ) / 22 - 21) )1,где 2, 2 - наружный радиус соответственно дляиполюсов 1, 1 - внутренний радиус соответственно дляиполюсов,- количество зубцов наиполюсах. 17. Датчик по любому из пп. 1-16, отличающийся тем, что преобразователи магнитной индукции выполнены в виде преобразователей Холла. Изобретение относится к электротехнике, в частности к устройствам, используемым в магнитоэлектрическом шаговом двигателе, и предназначено для выработкииэлектрических сигналов, однозначно определяющих положение якоря относительно зубцовой структуры статора двигателя. Известен индукционный тахометр 1, состоящий из двух П-образных магнитомягких сердечников, между которыми расположен постоянный магнит. На магнитомягких сердечниках расположены обмотки. Недостаток этого датчика состоит в том, что его информационные сигналы зависят как от положения, так и от скорости его перемещения. Известно также устройство, содержащее П-образный магнитопровод и постоянный магнит, выполненный в виде плоской прямоугольной пластины, расположенной на внутренней стороне магнитопровода 2. Недостатком этого устройства при использовании его в качестве датчика положения якоря шагового двигателя является зависимость информационного сигнала как от скорости, так и от положения якоря. Все это приводит к большой погрешности регистрации положения якоря шагового двигателя, поскольку при остановке двигателя информационный сигнал такого датчика равен нулю. Наиболее близким к предлагаемому устройству является датчик положения якоря планарного шагового двигателя, содержащий два П-образных магнитопровода, шунтированных постоянным магнитом. Магнитопроводы выполнены из трех частей, между которыми установлены преобразователи Холла 3. 2 4649 1 Недостаток прототипа состоит в наличии гистерезиса информационных сигналов, что объясняется перемагничиванием П-образных магнитопроводов. Перемагничивание П-образных магнитопроводов проявляет себя и тем, что информационный сигнал, хоть и в меньшей мере, чем у аналогов, зависит от скорости движения якоря. Наличие воздушных зазоров, в которых установлены преобразователи Холла, приводит к тому,что амплитуда информационного сигнала почти на порядок меньше постоянной составляющей. Это приводит к недостаточно высокой температурной стабильности параметров прототипа. Цель изобретения - повышение метрологических параметров датчика положения, обеспечение возможности использования датчика в линейных, планарных, торцевых и цилиндрических магнитоэлектрических шаговых двигателях. Указанная цель достигается тем, что в датчике положения (ДП) якоря магнитоэлектрического шагового двигателя, содержащем два составных П-образных магнитопровода, на полюсах сердечников каждого магнитопровода сформированы зубцы, разность групповых координат которых равна (0,5), и два преобразователя магнитной индукции, в одну из составных частей П-образных магнитопроводов последовательно включен постоянный магнит, а преобразователи магнитной индукции конструктивно или в магнитном отношении установлены вблизи пары одноименных магнитных полюсов сердечников пары П-образных магнитопроводов так, что выходной сигнал преобразователей прямо проционален разности м.д.с. этих магнитных полюсов. Здесь а - любое целое число- период расположения зубцов. Датчик дополнительно снабжен по крайней мере третьим, идентичным первым двум, магнитопроводом и по крайней мере третьим преобразователем магнитной индукции, выполненным в виде преобразователя Холла. Постоянный магнит может быть последовательно включенным как в спинку П-образного магнитопровода, так и в один из его сердечников. Пространственный сдвиг зубцов пары одноименных магнитных полюсов пары П-образных магнитопроводов, расположенных напротив друг друга конструктивно или в магнитном отношении, может составлять (0,5) или (0,25). Постоянный магнит выполнен из высококоэрцитивных материалов, например сплава самарий-кобальт. Части сердечников и спинок П-образных магнитопроводов могут быть выполнены из сплошного магнитомягкого материала, например электростали, что позволяет легко изменять направление зубцов как параллельно, так и перпендикулярно направлению спинки П-образных магнитопроводов. П-образные магнитопроводы могут располагаться, в зависимости от конфигурации якоря, как друг за другом в плоскостях, параллельных плоскости передних граней их сердечников, так и в линию в плоскости,совпадающей с плоскостью передних граней их сердечников. Поверхность, описывающая гребни зубцов магнитных полюсов сердечников П-образных магнитопроводов, выполнена в форме поверхности статора шагового двигателя. Для использования датчика в торцевом шаговом двигателе П-образные магнитопроводы могут располагаться так, что полюса их сердечников лежат на круговом кольце. Для этих же целей датчик выполняется так, что плоскость гребней зубцовполюсов выполнена в виде кольцевого сектора. На фиг. 1-3 представлены варианты принципиальной конструкции ДП якоря магнитоэлектрического шагового двигателя по первому пункту формулы изобретения, а на фиг. 4 - по второму, фиг. 5 - по двенадцатому. На фиг. 6 приведена схема замещения ДП с двумя П-образными магнитопроводами. На фиг. 7 изображена принципиальная конструкция с четырьмя магнитопроводами, а на фиг. 8 - с тремя магнитопроводами. На фиг. 9 представлена схема замещения ДП с тремя магнитопроводами и круговая диаграмма, поясняющая его работу. На фиг. 10, фиг. 11 представлены принципиальные конструкции ДП для торцевых шаговых двигателей. Базовая конструкция датчика положения содержит два составных П-образных магнитопровода, в которых в одну из составных частей (на фиг. 1 - спинка (3), на фиг. 2 - сердечник (1 последовательно включен постоянный магнит 3. Два преобразователя 2 магнитной индукции конструктивно (фиг. 1) или в магнитном отношении (фиг. 3) установлены вблизи пары одноименных магнитных полюсов сердечников 1 пары П-образных магнитопроводов так, что выходной сигнал преобразователей 2 прямо пропорционален разности м.д.с. этих полюсов. На полюсах сердечников каждого магнитопровода сформированы зубцы (на виде А показаны белыми прямоугольными полосками) и впадины (на виде А показаны черными прямоугольными полосками). Разность координат расположения между одноименными зубцами (групповых координат) двух полюсов в П-образных магнитопроводах равна (0,5). Рассмотрим работу предлагаемого датчика на примере использования его в планарном шаговом магнитоэлектрическом двигателе с совмещенными координатами. Планарный двигатель содержит ферромагнитный зубчатый статор и якорь. Статор выполнен в виде листа из ферромагнитного материала с пазами на верхней поверхности, заполненными немагнитным материалом. Пазы расположены по осям ,декартовой системы координат. При работе двигателя на его якоре закрепляют три датчика положения (два датчика, например, на координатуи один на координату ). Два датчика положения на одной из координат двигателя позволяют по 3 4649 1 разности их показаний легко установить факт разворота якоря и, следовательно, бороться посредством соответствующего алгоритма управления с этим нежелательным явлением. На практике датчики положения уже на этапе изготовления якоря двигателя конструктивно постоянно встраиваются в корпус якоря. Чтобы Х-овый (овый) датчик не чувствовал перемещения в ортогональном направлении, длина зубцов выбрана по величине,близкой к целому числу периодов расположения зубцов. Рабочий зазор между якорем и статором обеспечивается воздушной подушкой (в общем случае различными типами подшипников). Для создания воздушной подушки в якорь подают сжатый воздух. Сила притяжения, создаваемая постоянными магнитами якоря, к статору при этом уравновешивается силой отталкивания, обусловленной давлением воздуха, и якорь всплывает над статором. Якорь перемещается вдоль статора за счет энергии электромагнитного взаимодействия тяговых электромагнитов якоря с зубцовой структурой статора. Для описания принципа функционирования датчика проведем анализ его схемы замещения (фиг. 2). В первом приближении можно принять, что(1) 1-(2/ ),где 1 - магнитное сопротивление воздушного зазора между статором и полюсом сердечника П-образного магнитопровода датчика, у которого зубцы расположены напротив зубцов статора двигателя,- соответственно постоянная составляющая и амплитуда первой гармоники магнитного сопротивления 1 при перемещении якоря относительно статора- координата, вдоль которой перемещается датчик. В свою очередь, магнитные сопротивления воздушных зазоров для полюсов сердечников магнитопроводов, у которых зубцы сдвинуты по отношению к нулевому положению на 0,5 0,25 -0,25, будут соответственно равны(2) 2(2/),(3) 3-(2/),(4) 4(2/). Магнитные потоки Ф 1, Ф 2, создаваемые постоянными магнитами ДП, равны Ф 1 Ф 2/(12)/(2)Ф.(6) Тогда м.д.с. 12- 21 Ф(2 - )2 Фм (2/). Поскольку преобразователи 2 Холла расположены между магнитными сопротивлениями 1 и 2, то их информационные сигналы ех прямо пропорциональны амплитудам м.д.с. (магнитодвижущих сил) 12, 21 и сдвинуты по фазе на 180. На практике из-за разброса технологических и конструктивных параметров ДП в выходном сигнале ех помимо первой гармоники присутствуют небольшая постоянная составляющая, вторая гармоника одного знака. Для их устранения используется дифференциальное включение преобразователей Холла. Следует обратить внимание на то, что по выражению (6) положение шагового двигателя таким ДП можно определять, если априори знаешь, в каком квадранте единичного круга находишься. Однако этот недостаток легко устраняется использованием второго аналогичного ДП (фиг. 3), сдвинутого по отношению к первому в направлении перемещения на четверть периода. Действительно, в этом случае (формулы (3), (4 выходной сигнал второго ДП(7) 432 Фм (2/). Таким образом, предлагаемый датчик позволяет сформировать два ортогональных сигнала, по которым однозначно определяется положение якоря шагового двигателя относительно зубцовой структуры статора. Повышение точности предлагаемого датчика положения якоря планарного шагового двигателя объясняется следующим 1. При движении датчика над статором планарного шагового двигателя полюса магнитопроводов датчика не перемагничиваются, т.е. отсутствует гистерезис. Этому также способствует то, что параметры постоянного магнита (из-за отсутствия перемагничивания) можно выбрать такими, что полюса датчика работают при высоких значениях магнитной индукции, где нелинейностью и гистерезисом материала магнитопроводов можно пренебречь. 2. Высокий уровень магнитной индукции в полюсах датчика делает его нечувствительным к магнитному следу якоря двигателя. 3. В магнитом отношении, из-за конструкции датчика, преобразователи Холла реагируют на разностный магнитный поток, т.е. датчик имеет большой коэффициент модуляции и, как следствие, имеет а) высокую температурную стабильность б) помехозащитен от однонаправленных однородных магнитных полей в) менее критичен к наклонам. Возможность электрического дифференциального включения преобразователей Холла также повышает метрологические характеристики предлагаемого датчика положения г) улучшает температурную стабильность д) уменьшает коэффициент нелинейных искажений выходных сигналов 4 4649 1 е) легко обеспечивает симметрирование выходных сигналов относительного нулевого уровня. На фиг. 3-4 представлена принципиальная конструкция узкого ДП, который в отдельных случаях лучше встраивается в конкретные конструкции якорей двигателей. На фиг. 5 представлен ДП для цилиндрического шагового двигателя с диаметром Д ответной части. В конструкции ДП, представленной на фиг. 8, используется только три П-образных магнитопровода, что выгодно его отличает от рассмотренной выше схемы формирования двух ортогональных сигналов. ДП в соответствии с п. 3 формулы изобретения отличается от базовой конструкции ДП тем, что пространственный сдвиг зубцов пары одноименных магнитных полюсов соседней пары П-образных магнитопроводов, расположенных напротив друг друга, составляет (0,25). ДП состоит из трех составных П-образных магнитопроводов и четырех преобразователей 2 Холла, установленных между одноименными магнитными полюсами сердечников 1. Для описания принципа функционирования датчика проведем анализ его схемы замещения. Так, магнитные сопротивления 12 М 3 М и м.д.с. 123 постоянных магнитов равны, то магнитные потоки Ф 1 Ф 2 Ф 3 Ф. Причем Ф/(12)/(20).(8) Поскольку преобразователи Холла расположены между магнитными сопротивлениями 13, 14,23, 24, то для определения их информационных сигналов необходимо знать м.д.с. 13, 14, 23,24. Как следует из эквивалентной схемы замещения датчика(9) 13 Ф(13)Ф( 2/ -2 х/)-2 Ф (2/ - /4),(10) 14 Ф(14)Ф(- 2/ -2 х/)-2 Ф (2//4),(11) 23 Ф(23)Ф( 2 х/2/)2 Ф (2//4),(12) 24 Ф(24)Ф( 2 х/ -2/)2 Ф (2/ - /4). Так как информационные сигналы преобразователей Холла прямо пропорциональны м.д.с. 13, 24, 23,14, то из формул (912) следует, что предлагаемый датчик положения имеет две пары противофазных сигналов 13 - 24, 14 - 23, сдвинутых между собой на 90 электрических градусов. Т.к. преобразователи 2 Холла включаются дифференциально, то выходными сигналами ДП являются сигналы, прямо пропорциональные(13) 1241322 Ф (2/ - /4),(14) 2231422 Ф (2//4). Качественно работу ДП можно проанализировать с помощью круговой диаграммы (фиг. 9), где в скобках помечены пространственные фазовые сдвиги зубцов магнитных полюсов сердечников 1 магнитопроводов ДП. На фиг. 10 представлена принципиальная конструкция ДП для торцевого шагового двигателя. Его отличие от рассмотренных выше ДП состоит в том, что в нем П-образные магнитопроводы расположены так, что полюса их сердечников лежат на круговом кольце. Это связано с тем, что зубцы на полюсах имеют вид кругового сектора. В случае использования, для торцевого шагового двигателя ДП (фиг. 8), плоскость гребней его зубцовполюсов выполняется в виде кольцевого сектора. Линейные размеры и количество зубцов выбирается из соотношения 22 - 21/ 22 - 211. Здесь 2, 2 - наружный радиус соответственно дляиполюсов 1, 1 - внутренний радиус соответственно дляиполюсов,- количество зубцов соответственно наиполюсах. Это выражение следует из равенства постоянных составляющихдля соответствующих полюсов. На предлагаемое изобретение разработана техническая документация и изготовлены опытные образцы ДП. Испытания показали их высокие метрологические параметры. Так, применение их в планарном сервоприводе позволяет обеспечить позиционирование шагового магнитоэлектрического двигателя с погрешностью не хуже 1 мкм. Источники информации 1.2525 1, 1998. 2.3836835 1, 1974. 3.1432680, 1988. Национальный центр интеллектуальной собственности. 220072, г. Минск, проспект Ф. Скорины, 66.
МПК / Метки
МПК: G01R 33/07, H02K 29/08, H02K 29/06
Метки: двигателя, якоря, датчик, шагового, положения, магнитоэлектрического
Код ссылки
<a href="https://by.patents.su/8-4649-datchik-polozheniya-yakorya-magnitoelektricheskogo-shagovogo-dvigatelya.html" rel="bookmark" title="База патентов Беларуси">Датчик положения якоря магнитоэлектрического шагового двигателя</a>
Датчик положения якоря планарного шагового двигателя
Номер патента: 2525
Опубликовано: 30.12.1998
Автор: Трусов Николай Калистратович
МПК: G01R 33/07, H02K 29/08
Метки: датчик, шагового, планарного, якоря, двигателя, положения
Текст:
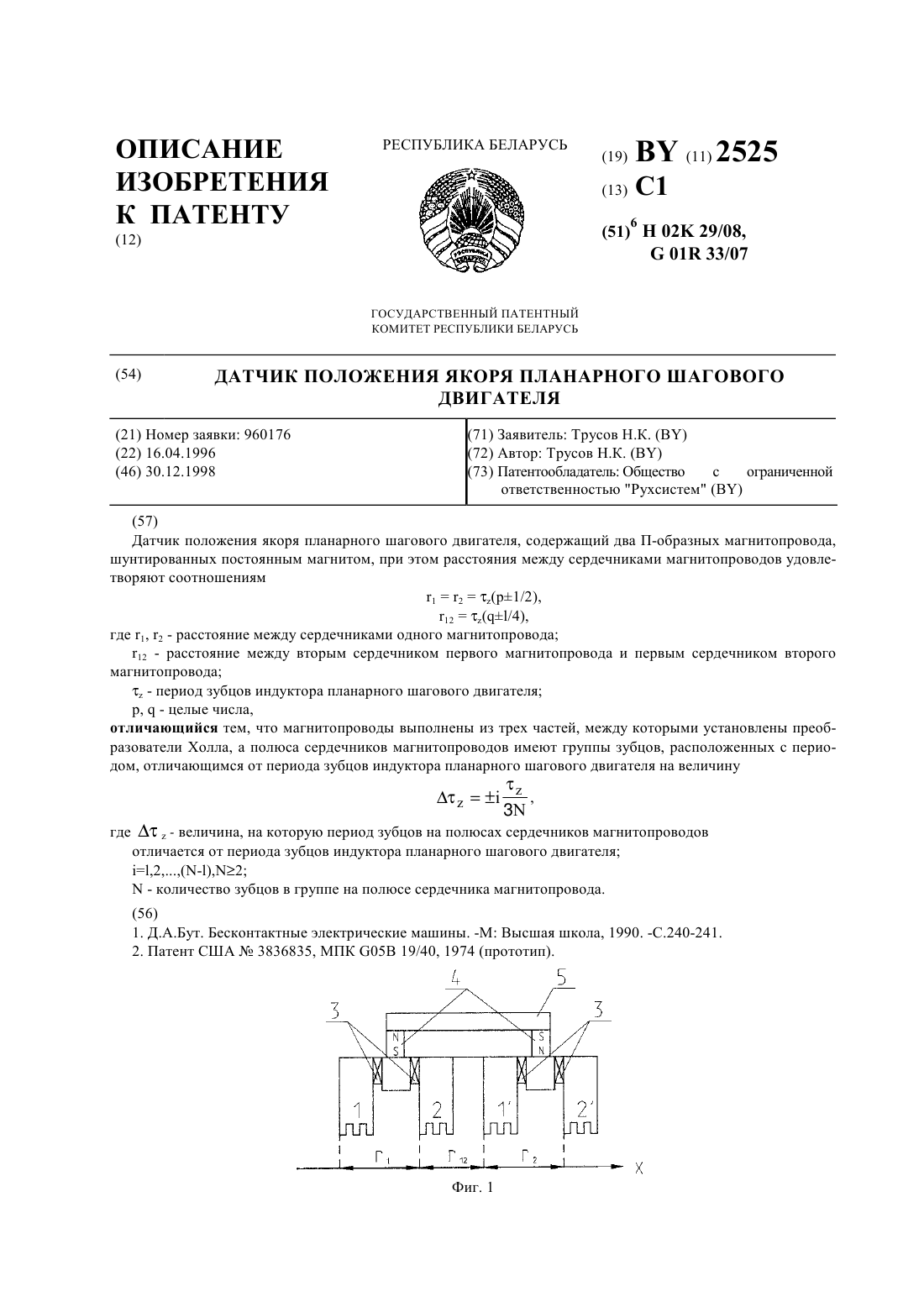
...2, (-1),2- количество зубцов в группе на полюсе сердечника магнитопровода. На фиг. 1 представлена принципиальная конструкция датчика положения планарного шагового двигателя на фиг. 2 - эквивалентная схема замещения датчика. Датчик положения планарного шагового двигателя выполнен из двух П-образных магнитопроводов, состоящих из трех частей, с соответственно сердечниками 1, 2 и 1, 2. На полюсах сердечников 1, 2 и 1, 2 имеются группы зубцов,...
Датчик положения якоря линейного шагового двигателя
Номер патента: 2427
Опубликовано: 30.09.1998
Автор: Трусов Николай Калистратович
МПК: G01R 33/07, H02K 29/08
Метки: датчик, якоря, шагового, положения, линейного, двигателя
Текст:
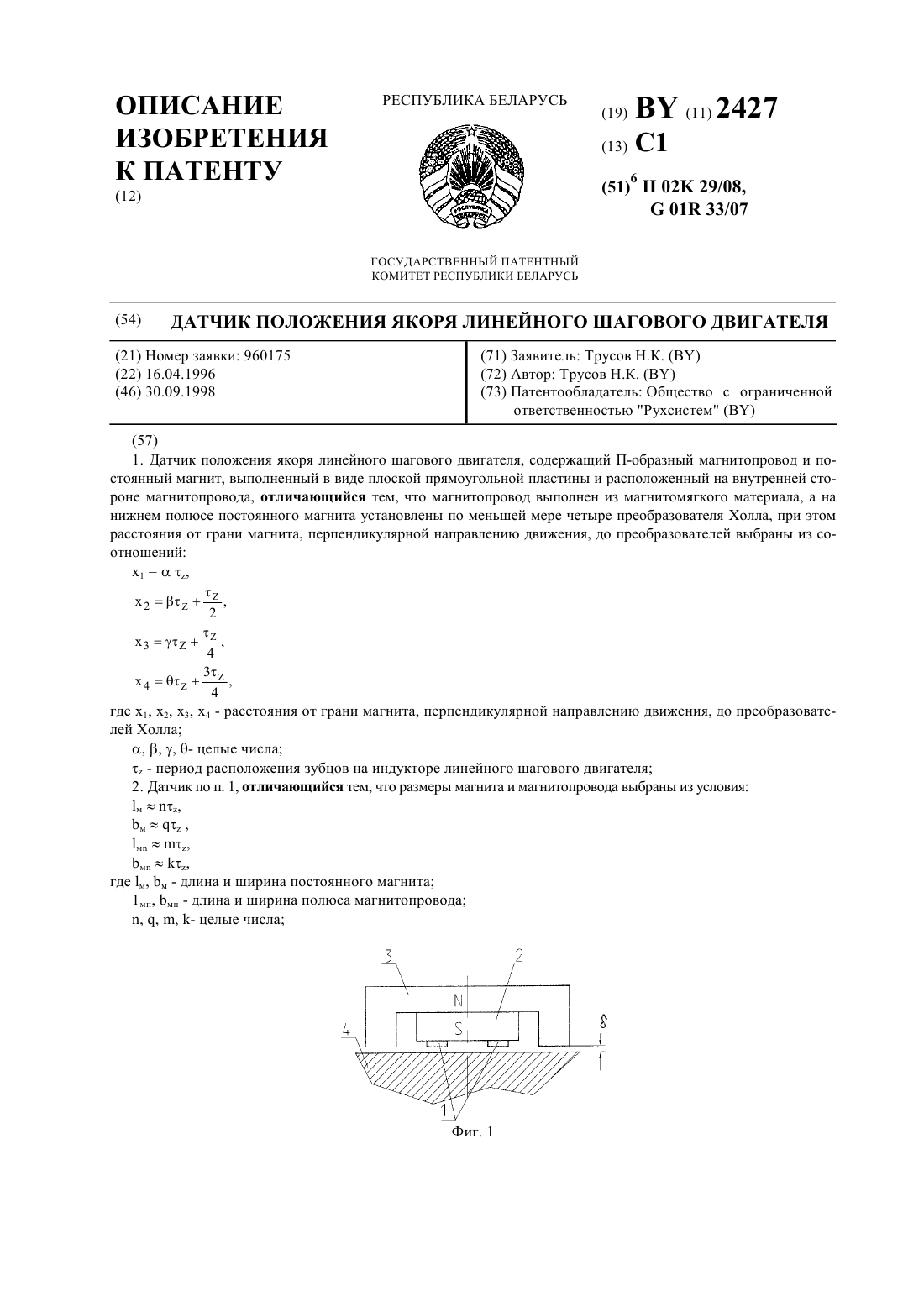
...1, 2, 3, 4 - расстояние от грани магнита, перпендикулярной направлению движения, до преобразователей Холла, , , - целые числа- период расположения зубцов на индукторе линейного шагового двигателя. Геометрические размеры магнита и магнитопровода выбраны из условий, что м,мп,мп. Здесь м, м - длина и ширина постоянного магнита мп , мп - длина и ширина полюса магнитопровода, , ,- целые числа. Кроме того, постоянный магнит выполнен из...
Однофазный электромагнитный модуль двухфазного шагового двигателя
Номер патента: 2957
Опубликовано: 30.09.1999
Авторы: Жарский Владимир Владимирович, Трусов Алексей Николаевич, Трусов Николай Калистратович, Власов Валерий Архипович
МПК: H02K 41/03
Метки: однофазный, двухфазного, двигателя, шагового, электромагнитный, модуль
Текст:
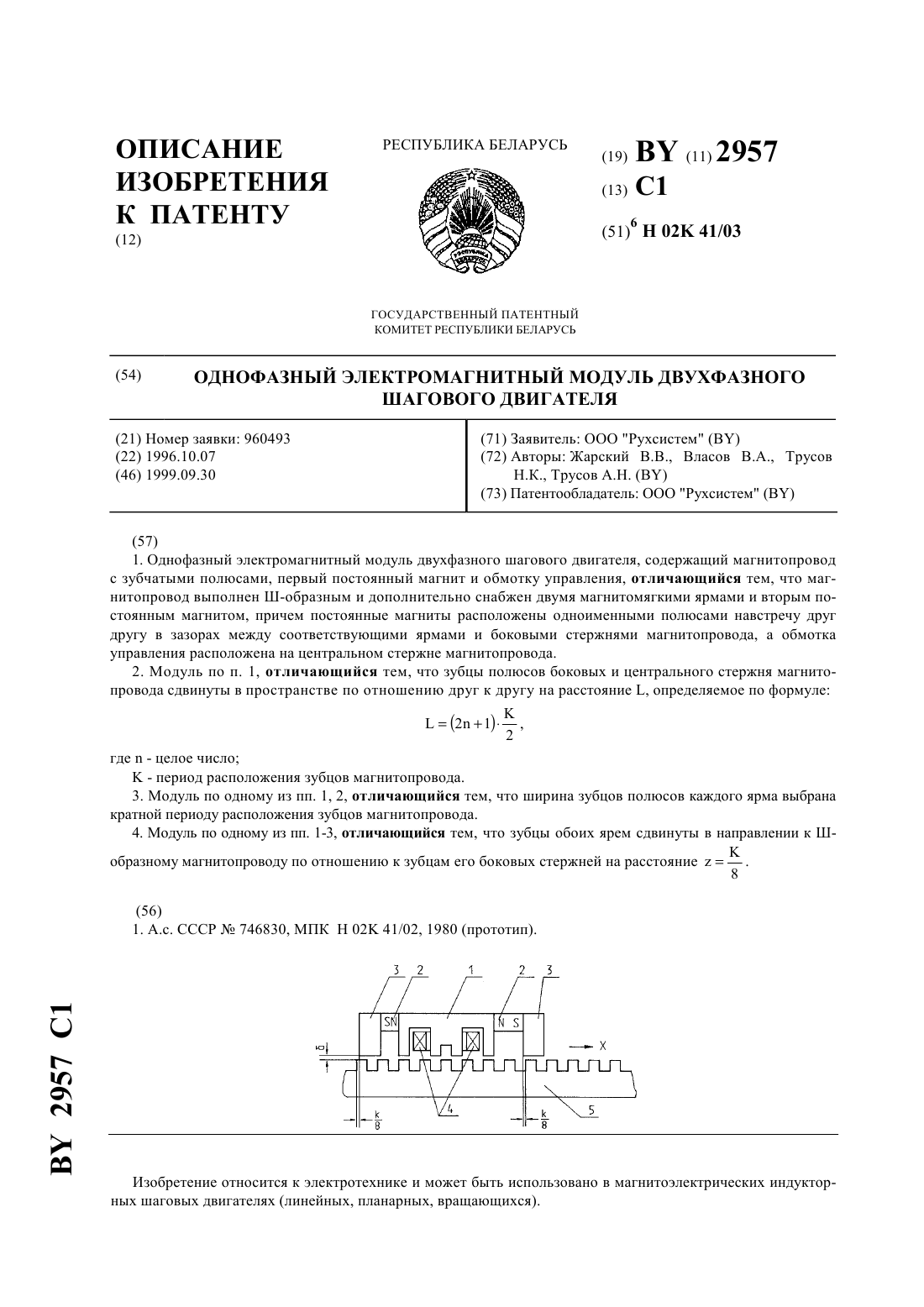
...боковых и центрального стержня магнитопровода сдвинуты в пространстве по отношению друг к другу на расстояние , определяемое по формуле(21),2 где- целое число К - период расположения зубцов магнитопровода. Ширина зубцов полюсов каждого ярма выбрана кратной периоду расположения зубцов магнитопровода,причем зубцы обоих ярем сдвинуты в направлении к Ш-образному магнитопроводу по отношению к зубцам его боковых стержней на расстояние. 8 На...
Плита статора линейного шагового двигателя
Номер патента: 2896
Опубликовано: 30.06.1999
Авторы: Руденко Анатолий Андреевич, Трусов Николай Калистратович
МПК: H02K 41/03, H02K 1/18, H02K 1/02...
Метки: шагового, двигателя, плита, статора, линейного
Текст:
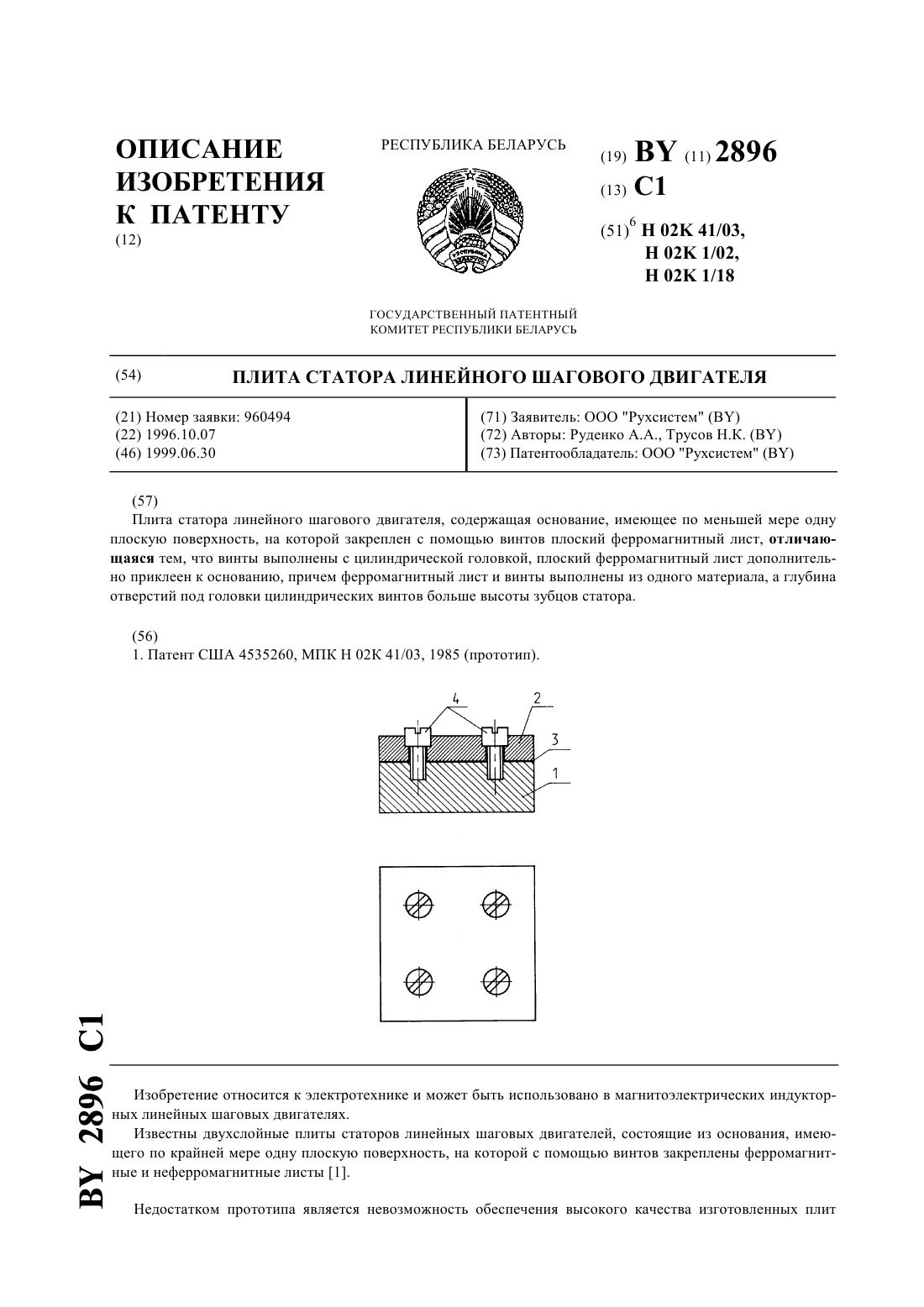
...показан общий вид одного из вариантов предлагаемой плиты статора линейного шагового двигателя. Плита статора линейного шагового двигателя содержит основание 1, выполненное в виде параллелепипеда, на котором при помощи эпоксидного компаунда 3 и винтов 4 закреплен ферромагнитный лист 2. Материал винтов 4 выбран идентичным материалу ферромагнитного листа. Достижение поставленной цели - повышение качества статора линейного шагового двигателя -...
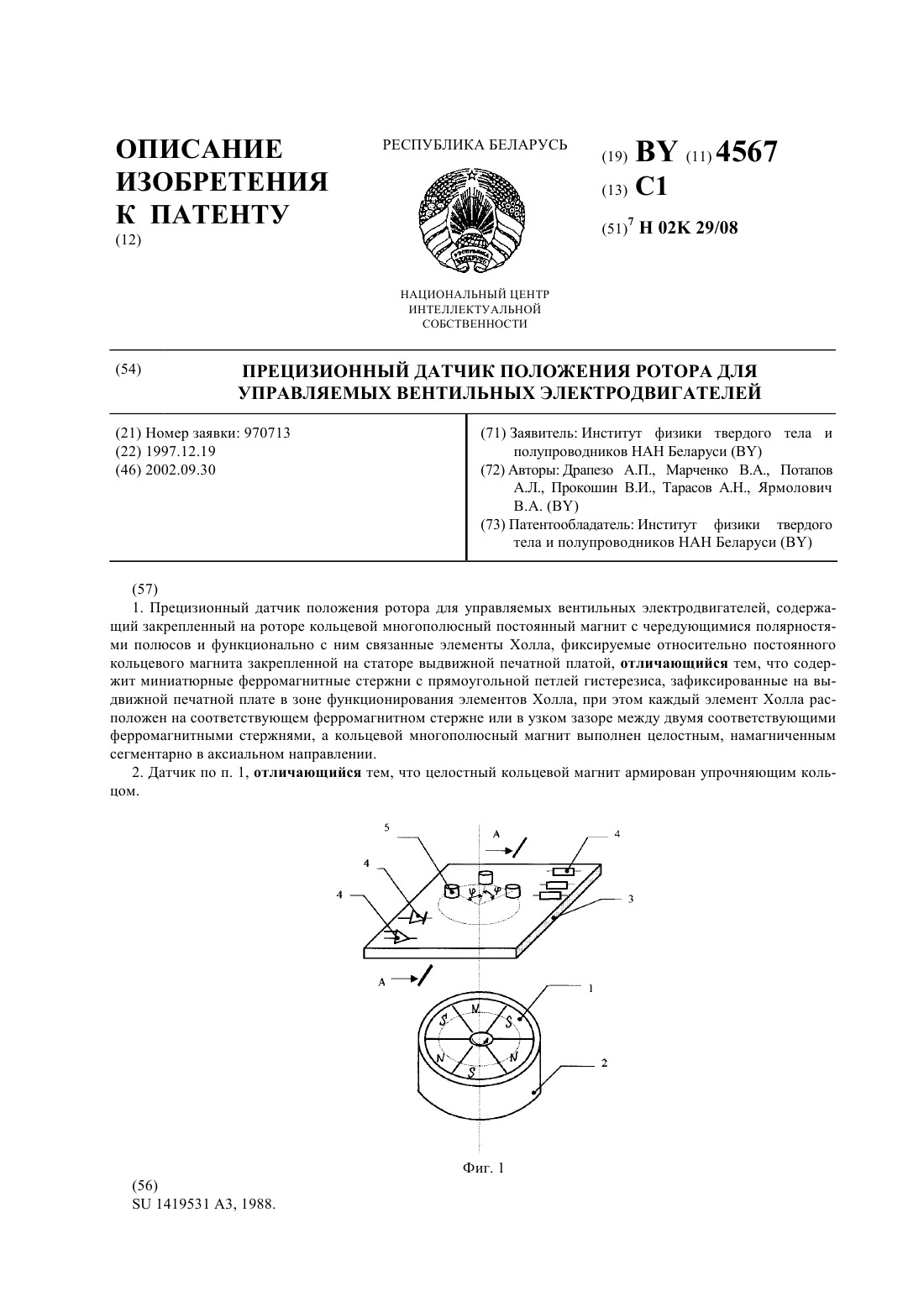
Прецизионный датчик положения ротора для управляемых вентильных электродвигателей
Номер патента: 4567
Опубликовано: 30.09.2002
Авторы: Прокошин Валерий Иванович, Тарасов Альберт Николаевич, Марченко Владимир Алексеевич, Драпезо Александр Петрович, Ярмолович Вячеслав Алексеевич, Потапов Александр Львович
МПК: H02K 29/08
Метки: электродвигателей, вентильных, положения, датчик, прецизионный, ротора, управляемых
Текст:
...введение миниатюрных ферромагнитных стержней с ППГ в зону функционирования элемента Холла обеспечивает повышение крутизны выходной характеристики ДПР, обеспечивает формирование узкой зоны перехода величины индукции магнитного поля через нуль при перемещении секторов магнита от - к - или наоборот, что и приводит к повышению точности позиционирования ротора. Сопутствующим положительным дополнительным эффектом является увеличение прочностных...
Предыдущий патент: Электрооптический анализатор спектра
Следующий патент: Двухкоординатный линейный шаговый двигатель с совмещенными координатами
Случайный патент: Устройство для контроля степени уплотнения асфальтобетонной смеси катком