Прецизионный датчик положения ротора для управляемых вентильных электродвигателей
Номер патента: 4567
Опубликовано: 30.09.2002
Авторы: Ярмолович Вячеслав Алексеевич, Прокошин Валерий Иванович, Драпезо Александр Петрович, Тарасов Альберт Николаевич, Марченко Владимир Алексеевич, Потапов Александр Львович
Текст
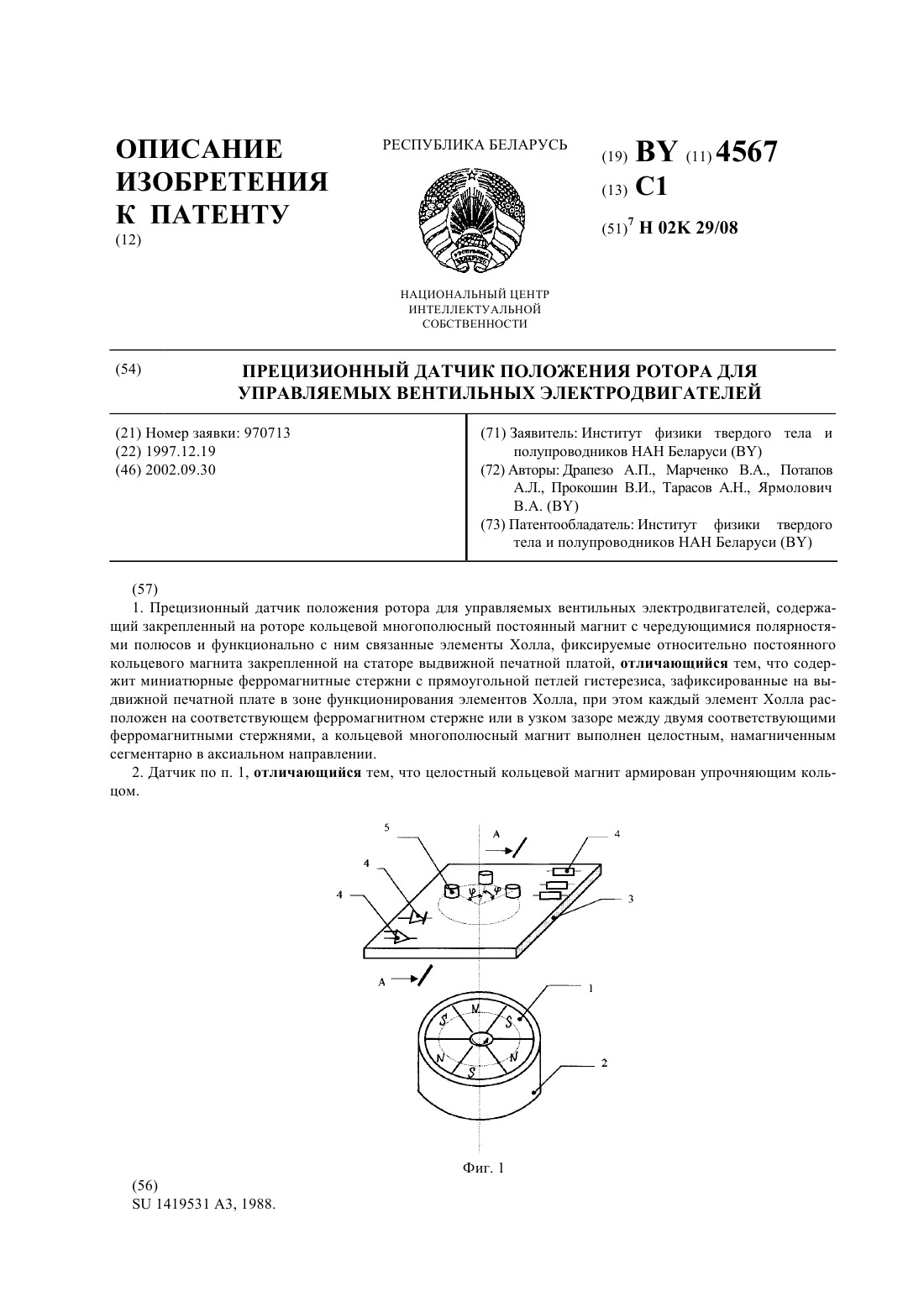
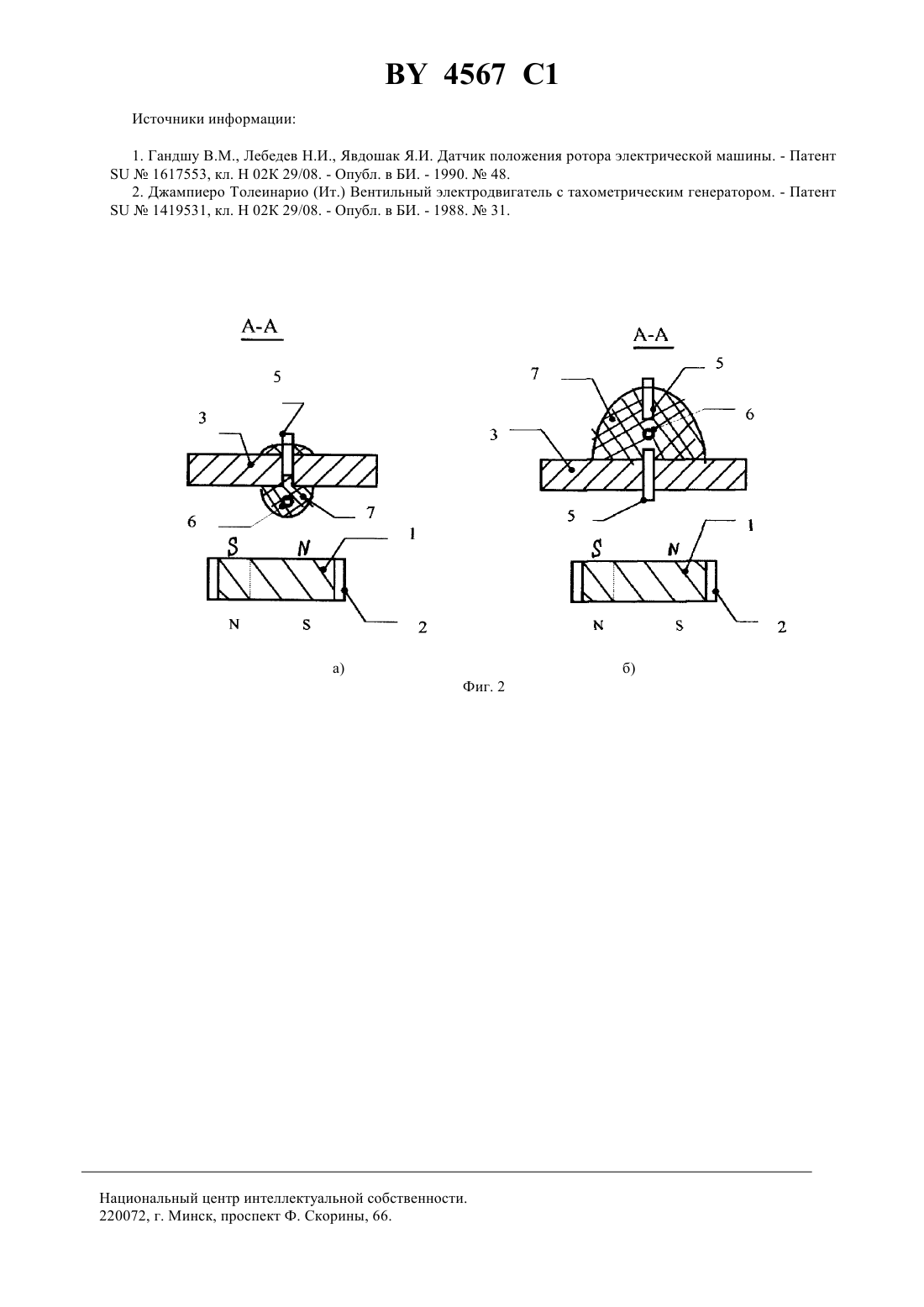
НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ПРЕЦИЗИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА ДЛЯ УПРАВЛЯЕМЫХ ВЕНТИЛЬНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ(71) Заявитель Институт физики твердого тела и полупроводников НАН Беларуси(73) Патентообладатель Институт физики твердого тела и полупроводников НАН Беларуси(57) 1. Прецизионный датчик положения ротора для управляемых вентильных электродвигателей, содержащий закрепленный на роторе кольцевой многополюсный постоянный магнит с чередующимися полярностями полюсов и функционально с ним связанные элементы Холла, фиксируемые относительно постоянного кольцевого магнита закрепленной на статоре выдвижной печатной платой, отличающийся тем, что содержит миниатюрные ферромагнитные стержни с прямоугольной петлей гистерезиса, зафиксированные на выдвижной печатной плате в зоне функционирования элементов Холла, при этом каждый элемент Холла расположен на соответствующем ферромагнитном стержне или в узком зазоре между двумя соответствующими ферромагнитными стержнями, а кольцевой многополюсный магнит выполнен целостным, намагниченным сегментарно в аксиальном направлении. 2. Датчик по п. 1, отличающийся тем, что целостный кольцевой магнит армирован упрочняющим кольцом. 4567 1 Предлагаемое изобретение относится к вентильным электродвигателям, а именно к прецизионным датчикам положения ротора для вентильных электродвигателей и может быть использовано для определения положения ротора. Известен датчик положения ротора (ДПР), содержащий армированный упрочняющим кольцом аксиально намагниченный кольцевой магнит с примыкающим к его торцевым поверхностям магнитопроводом с секторными зубцами, закрепленный на валу ротора, а также неподвижные магниточувствительные элементы Холла, закрепленные на статоре 1. При вращении ротора ДПР каждый из чувствительных элементов поочередно находится либо в аксиальном поле между зубцами, либо в зоне отсутствия этого поля, а точнее, в поле рассеяния кольцевого магнита, которое ниже уровня срабатывания магниточувствительных элементов. Данный датчик не обладает достаточной прецизионностью определения положения ротора в зоне перехода от наличия магнитного поля между зубцами к полю рассеяния аксиального магнита. Эта зона изменения величины магнитной индукции является плавной и достаточно широкой, в связи с этим возникает неопределенный интервал (зона нечувствительности) в определении положения ротора, а именно в это время должны происходить процессы коммутации в обмотках электродвигателя. Уменьшить ширину перехода величины магнитной индукции соответствующей логической единицы к величине соответствующей логическому нулю можно, использовав переход ее через нуль в магнитных системах, состоящих из противоположно намагниченных полюсов, т.е. -и -. Наиболее близким к предлагаемому является техническое решение ДПР, применяемое в вентильном двигателе 2 (прототип). Ротор датчика положения имеет форму плоского диска, расположенного на валу двигателя и состоит из корпуса из синтетической смолы, в котором утоплены постоянные магниты в форме кольцевых сегментов. Постоянные магниты расположены таким образом, что рабочие поверхности полюсов,следуя друг за другом по окружности, образуют чередующуюся полярность. Магниточувствительные элементы Холла закреплены в отверстиях изолирующей пластины, которая размещена на статорном фланце. В данном ДПР применение чередующихся полярностей магнитов позволяет вырабатывать сигнал управления фазы электродвигателя при переходе величины индукции магнитного поля через нуль, тем самым уменьшая неопределенность в положении ротора. Однако применение связующего в виде эпоксидной смолы или других полимеризующих наполнителей способствуют созданию неконтролируемого разброса ширины немагнитных участков между магнитами, изменению технических характеристик обоймы магнитов под воздействием температуры и центробежных усилий, вызывающих пластические деформации полимеров. Кроме того, неоднородные участки магнитсвязующее-магнит имеют низкую прочность, что ограничивает их применение в высокоскоростных вентильных электродвигателях. Тем самым в основном из-за временной нестабильности в данном датчике невысока точность позиционирования с помощью магниточувствительных элементов. Задачей изобретения является повышение точности позиционирования ротора вентильного электродвигателя. Названный технический результат достигается путем уменьшения зоны перехода величины индукции магнитного поля через нуль (т.е. величинам соответствующим логическому нулю и логической единицы) и одновременно увеличением крутизны выходной характеристики с элемента Холла. Данный эффект обусловлен совместным применением целостного кольцевого магнита, намагниченного в аксиальном направлении с чередующимися полярностями полюсов и расположенными по окружности, и миниатюрными ферромагнитными стержнями, обладающими прямоугольными петлями гистерезиса при перемагничивании (ППГ). Предлагаемое техническое решение содержит закрепленный на роторе кольцевой многополюсный постоянный магнит с чередующимися полярностями полюсов и функционально с ним связанные элементы Холла,фиксируемые относительно постоянного кольцевого магнита закрепленной на статоре выдвижной печатной платой, и отличается тем, что содержит миниатюрные ферромагнитные стержни с прямоугольной петлей гистерезиса, зафиксированные на выдвижной печатной плате в зоне функционирования элементов Холла,при этом каждый элемент Холла расположен на соответствующем ферромагнитном стержне или в узком зазоре между двумя соответствующими ферромагнитными стержнями, а кольцевой многополюсный магнит выполнен целостным, намагниченным сегментарно в аксиальном направлении. Дополнительно целостный кольцевой магнит армирован упрочняющим кольцом. Сравнение заявляемого и известных решений показало, что введение миниатюрных ферромагнитных стержней с ППГ в зону функционирования элемента Холла обеспечивает повышение крутизны выходной характеристики ДПР, обеспечивает формирование узкой зоны перехода величины индукции магнитного поля через нуль при перемещении секторов магнита от - к - или наоборот, что и приводит к повышению точности позиционирования ротора. Сопутствующим положительным дополнительным эффектом является увеличение прочностных характеристик целостного многополюсного магнита, из-за его армирования, и, как следствие, возможность использова 2 4567 1 ния датчика в высокоскоростных вентильных электродвигателях. Также увеличивается временная стабильность магнитной системы магнит - стержни с ППГ и улучшается помехозащищенность датчика от неконтролируемых электромагнитных помех. Анализ вышеперечисленных технических элементов, присутствующих в ДПР, по сравнению с прототипом указывает на техническую новизну решения для достижения поставленной задачи по увеличению точности позиционирования ротора вентильного электродвигателя. Анализ предлагаемого решения и известных решений указывает на то, что отличия являются существенными. Это обусловлено тем, что введение новых элементов, т.е. миниатюрных стержней с ППГ приводит к дополнительному магнитному взаимодействию их с полюсами магнита. При этом изменяется распределение аксиальной составляющей индукции магнитного поля в зоне расположения элемента Холла, что и приводит к сужению области перехода индукции магнитного поля через нуль (т.е. повышается градиент индукции магнитного поля). Это изменение распределения индукции вызывается процессами перемагничивания стержней, происходящими на микроуровне. Перемагничивание происходит преимущественно в результате смещения доменных границ, т.е. роста тех доменов, направление намагниченности которых совпадает с направлением приложенного поля. При этом изменения происходят скачкообразно, а высокое удельное электросопротивление ферритов с ППГ (не мене 10 000 Ом-см) способствует отсутствию вихревых токов, что и обеспечивает малое время переключения. Указанные выше эффекты и приводят к увеличению точности позиционирования границы раздела полюсов, т.е. и самого ротора. В связи с вышеизложенным предлагается следующий датчик. На фиг. 1 представлен прецизионный датчик положения ротора, на фиг. 2 а и 2 б - поперечные сечения А-А платы с элементами Холла со стержнями,обладающими ППГ, проходящие через ось симметрии ферромагнитного стержня (два варианта размещения элемента Холла). Датчик содержит постоянный кольцевой магнит 1, намагниченный сегментарно в аксиальном направлении с чередующимися полярностями полюсов -, -, армированный упрочняющим кольцом 2 из немагнитного материала, расположенный на роторном валу. Выдвижная печатная плата 3 вместе с электрическими элементами 4 в том числе и в гибридном исполнении закреплена на статоре. В плате предусмотрены отверстия, расположенные по окружности (например, с углом (60 или 30 и т.д., что необходимо в зависимости от числа фаз и числа секторов магнита), в которые монтируются миниатюрные ферромагнитные стержни 5 с ППГ. На каждом стержне 5 расположен элемент Холла 6, залитый защитным компаундом и эпоксидной смолой 7. Во втором варианте на фиг. 2 б предусмотрено расположение элементов Холла в узком зазоре между двумя стержнями с ППГ (каждый элемент Холла между двумя стержнями). Датчик работает следующим образом. Каждый элемент Холла определяет полярность сегмента магнита и генерирует ЗДС. При вращении кольцевого магнита 1 к выделенному магниточувствительному элементу Холла 6 приближается граница одного из секторов с противоположно намагниченными участками по обе ее стороны. Аксиальная составляющая индукции магнитного поля вблизи границы секторов переходит через нуль и имеет вид. Далее усиливается взаимодействие полюсов магнита, находящихся непосредственно около выделенного магниточувствительного элемента с ферромагнитным стержнем 5 (стержнями 5 в другом варианте). При этом происходит перемагничивание стержня (двух стержней в другом варианте) за счет энергии постоянного магнита 1. При этом из-за того, что стержни имеют ППГ при перемагничивании, увеличивается крутизна выходного сигнала с элемента Холла. Одновременно из-за магнитного взаимодействия полюсов магнита 1 со стержнями 5 происходит изменение распределения аксиальной составляющей индукции магнитного поля поперек границы раздела полюсов, это и обеспечивает сужение области перехода величины индукции через нуль. Тем самым и увеличивается точность позиционирования ротора вентильного электродвигателя. Следует отметить, что использование расположения элемента Холла между двумя стержнями с ППГ увеличивает градиент индукции внутри перехода через нуль практически в 1,52 раза по сравнению со случаем использования одного стержня. В дальнейшем при вращении магнита 1 к магниточувствительному элементу приближается следующая граница разделения из полюсов - и -, и происходит процесс перемагничивания стержней 5 только в обратном направлении. ЭДС от холловских элементов подаются в схему формирования управляющих сигналов, которая обеспечивает правильное подключение обмоток в соответствии с положением ротора. Таким образом, использование совокупности элементов целостного магнита, намагниченного соответствующим образом, и миниатюрных ферромагнитных стержней с ППГ, размещенных в области функционирования элементов Холла, приводят к формированию узкой зоны перехода величины индукции магнитного поля через нуль, т.е. к повышению точности позиционирования ротора. Положительным дополнительным эффектом является увеличение прочностных характеристик целостного многополюсного магнита, из-за его армирования, и как следствие возможность использования датчика в высокоскоростных вентильных электродвигателях. 4567 1 Источники информации 1. Гандшу В.М., Лебедев Н.И., Явдошак Я.И. Датчик положения ротора электрической машины. - Патент 1617553, кл. Н 02 К 29/08. - Опубл. в БИ. - 1990.48. 2. Джампиеро Толеинарио (Ит.) Вентильный электродвигатель с тахометрическим генератором. - Патент 1419531, кл. Н 02 К 29/08. - Опубл. в БИ. - 1988.31. Национальный центр интеллектуальной собственности. 220072, г. Минск, проспект Ф. Скорины, 66.
МПК / Метки
МПК: H02K 29/08
Метки: положения, прецизионный, ротора, электродвигателей, управляемых, датчик, вентильных
Код ссылки
<a href="https://by.patents.su/4-4567-precizionnyjj-datchik-polozheniya-rotora-dlya-upravlyaemyh-ventilnyh-elektrodvigatelejj.html" rel="bookmark" title="База патентов Беларуси">Прецизионный датчик положения ротора для управляемых вентильных электродвигателей</a>
Датчик положения якоря линейного шагового двигателя
Номер патента: 2427
Опубликовано: 30.09.1998
Автор: Трусов Николай Калистратович
МПК: G01R 33/07, H02K 29/08
Метки: якоря, двигателя, линейного, датчик, положения, шагового
Текст:
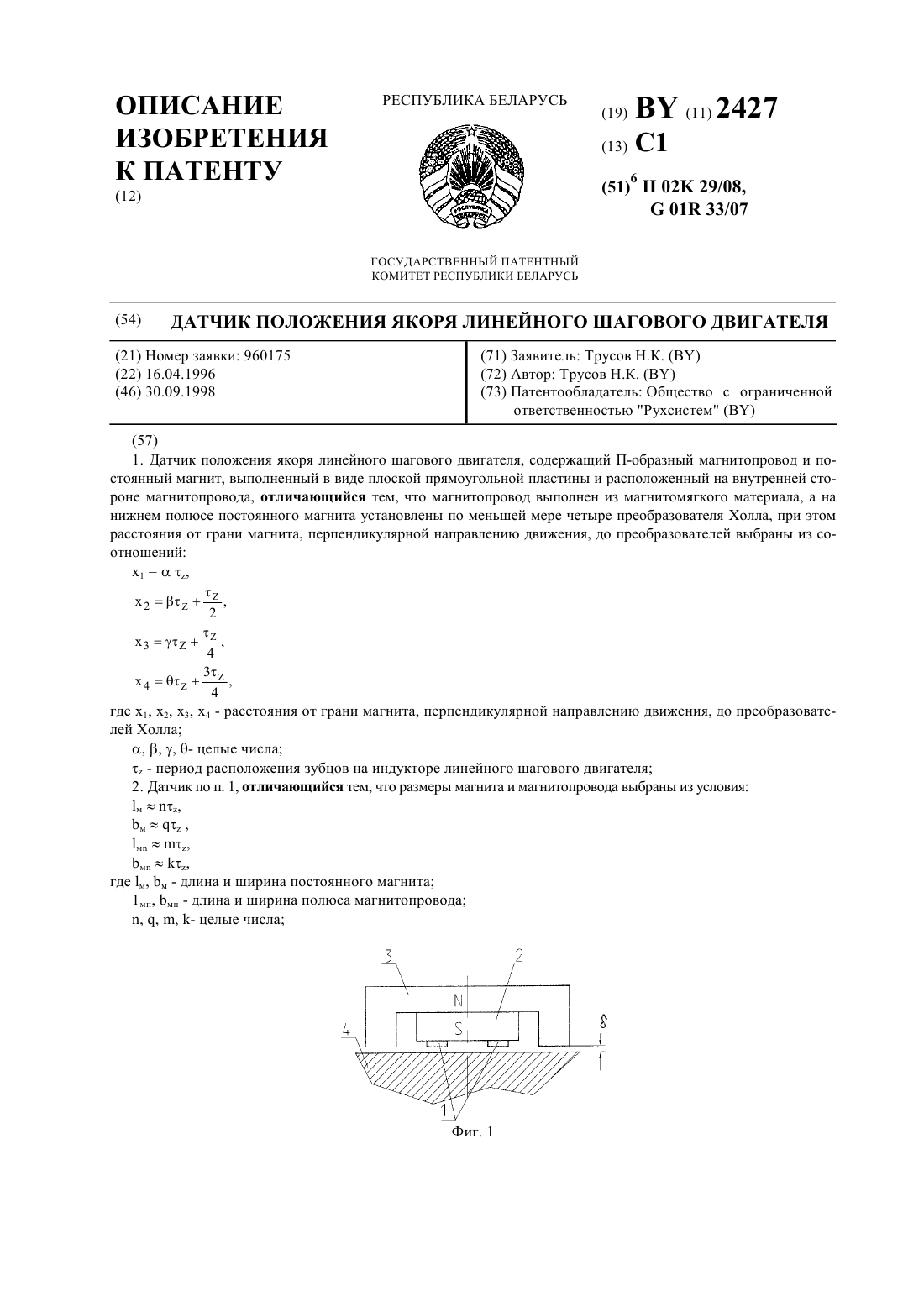
...1, 2, 3, 4 - расстояние от грани магнита, перпендикулярной направлению движения, до преобразователей Холла, , , - целые числа- период расположения зубцов на индукторе линейного шагового двигателя. Геометрические размеры магнита и магнитопровода выбраны из условий, что м,мп,мп. Здесь м, м - длина и ширина постоянного магнита мп , мп - длина и ширина полюса магнитопровода, , ,- целые числа. Кроме того, постоянный магнит выполнен из...
Датчик положения якоря планарного шагового двигателя
Номер патента: 2525
Опубликовано: 30.12.1998
Автор: Трусов Николай Калистратович
МПК: G01R 33/07, H02K 29/08
Метки: положения, якоря, двигателя, датчик, планарного, шагового
Текст:
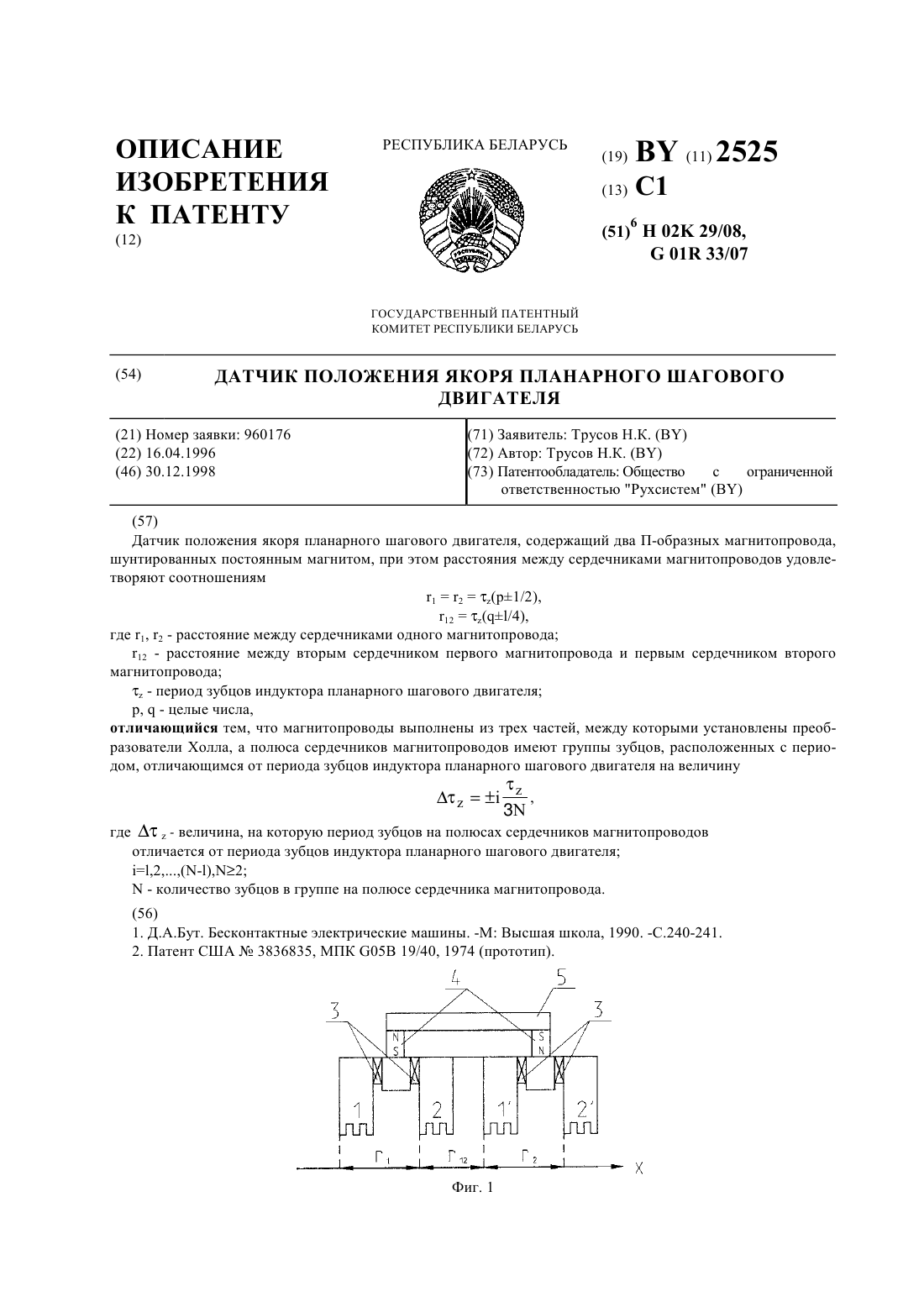
...2, (-1),2- количество зубцов в группе на полюсе сердечника магнитопровода. На фиг. 1 представлена принципиальная конструкция датчика положения планарного шагового двигателя на фиг. 2 - эквивалентная схема замещения датчика. Датчик положения планарного шагового двигателя выполнен из двух П-образных магнитопроводов, состоящих из трех частей, с соответственно сердечниками 1, 2 и 1, 2. На полюсах сердечников 1, 2 и 1, 2 имеются группы зубцов,...
Датчик давления
Номер патента: 4468
Опубликовано: 30.06.2002
Автор: Довгяло Дмитрий Александрович
МПК: G01L 9/14
Текст:
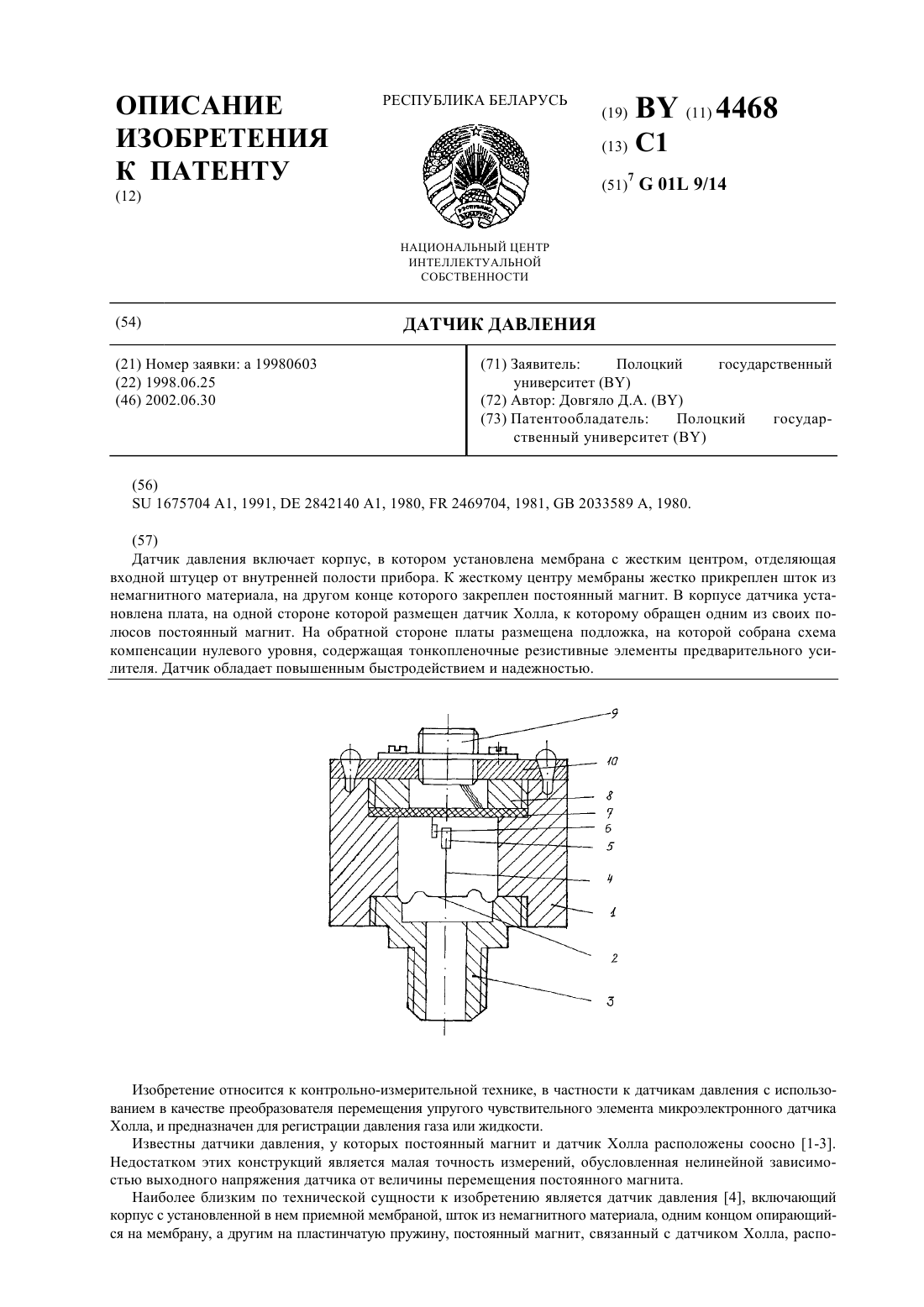
...и установленную в корпусе плату, на которой размещен датчик Холла, к которому обращен одним из своих полюсов постоянный магнит, в отличие от прототипа мембрана выполнена с жестким центром, к которому жестко прикреплен один конец штока, а на другом конце штока жестко закреплен постоянный магнит. Кроме того, в датчик введена схема компенсации нулевого уровня, состоящая из тонкопленочных резистивных элементов предварительного усилителя,...
Устройство определения углового положения вращающегося объекта
Номер патента: 3712
Опубликовано: 30.12.2000
Авторы: Ярмолович Вячеслав Алексеевич, Анищик Виктор Михайлович
МПК: G01B 7/30
Метки: вращающегося, объекта, устройство, определения, углового, положения
Текст:
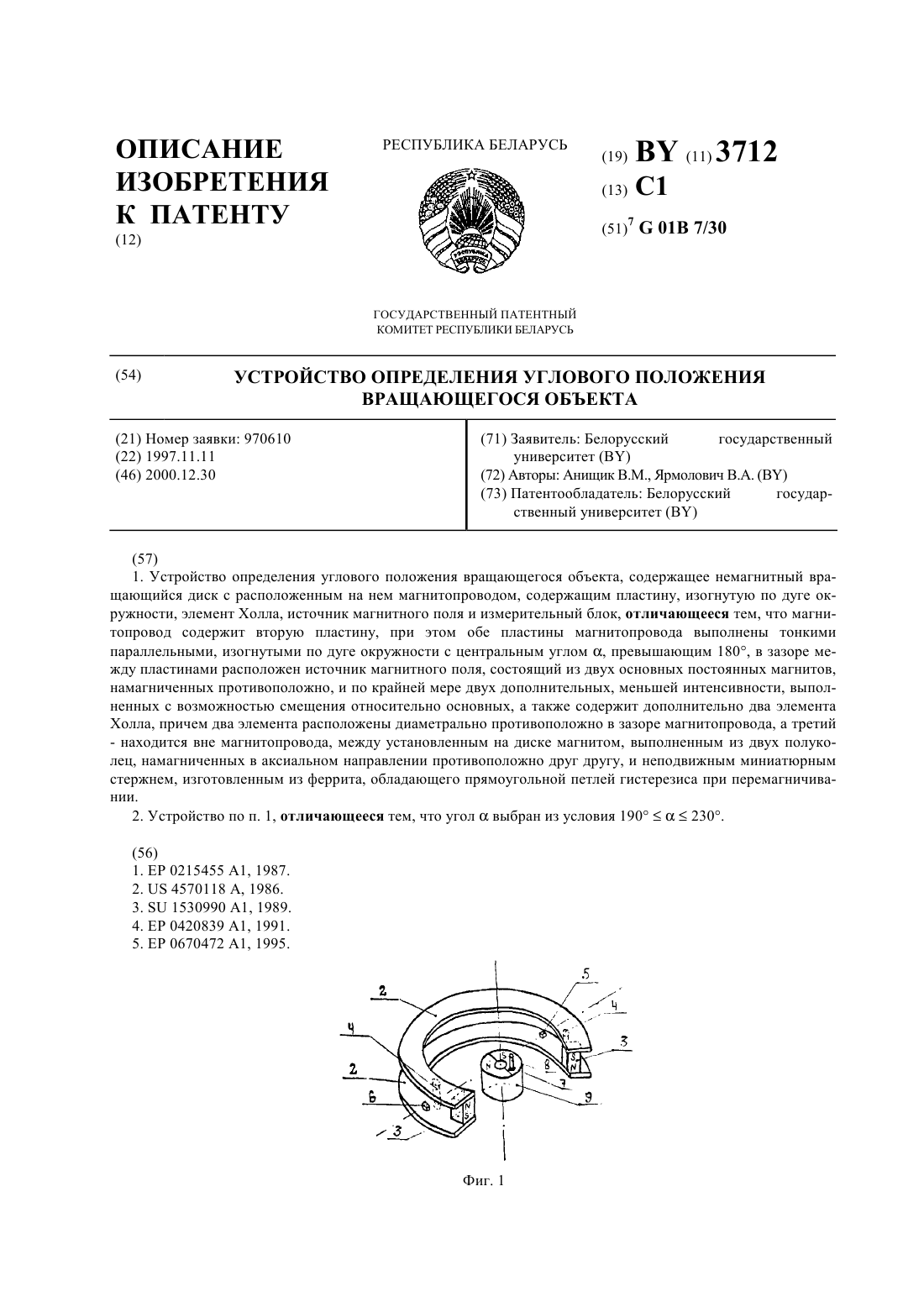
...источников магнитного поля в магнитопроводе, обеспечивающее строго линейную зависимость выходного сигнала от угла поворота в диапазоне углов более 180 при многооборотном вращении независимо от идентичности и симметричности постоянных магнитов. При этом выходной сигнал не зависит от аксиальных смещений вращающегося диска. Новым является использование трех элементов Холла, находящихся в функциональной связи с источниками магнитного...
Датчик давления
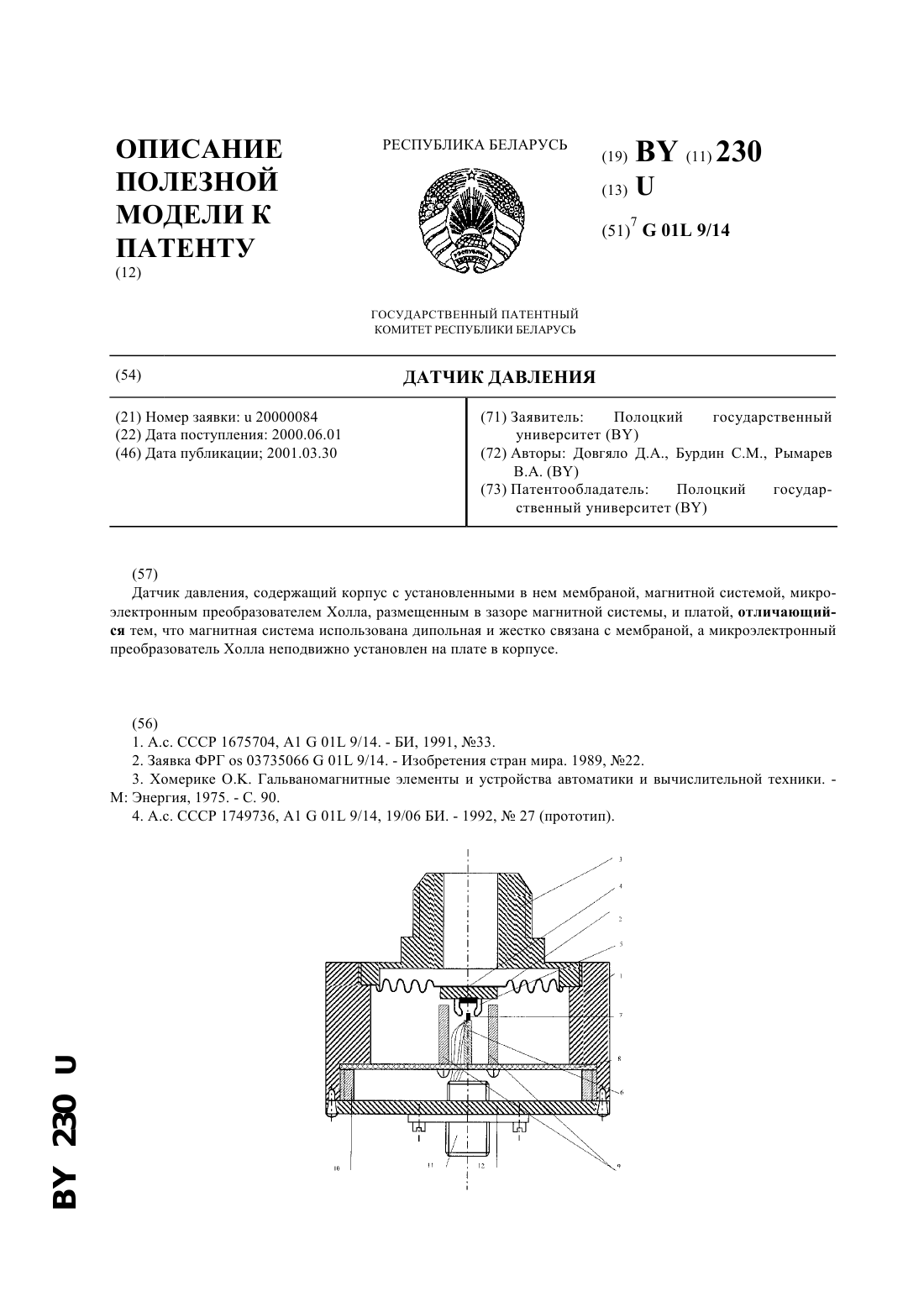
Номер патента: U 230
Опубликовано: 30.03.2001
Авторы: Рымарев Виталий Анатольевич, Бурдин Сергей Максимович, Довгяло Дмитрий Александрович
МПК: G01L 9/14
Текст:
...кольцо, расположенное снаружи разделительной трубки и закрепленное в упругом центрирующем подвесе, с которым связан электрический измерительный преобразователь, выполненный в виде двух датчиков Холла, размещенных в зазоре магнита. В данной конструкции возникают погрешности,связанные с наличием передаточных элементов, что значительно увеличивает погрешность измерений. Кроме того, в конструкции применяется два постоянных магнита....
Предыдущий патент: Способ газопламенного напыления покрытий из проволочных материалов
Следующий патент: Способ лечения инвазивного рака мочевого пузыря