Способ идентификации нелинейного динамического объекта
Номер патента: 18328
Опубликовано: 30.06.2014
Авторы: Петько Валерий Иванович, Хитриков Сергей Владимирович
Текст
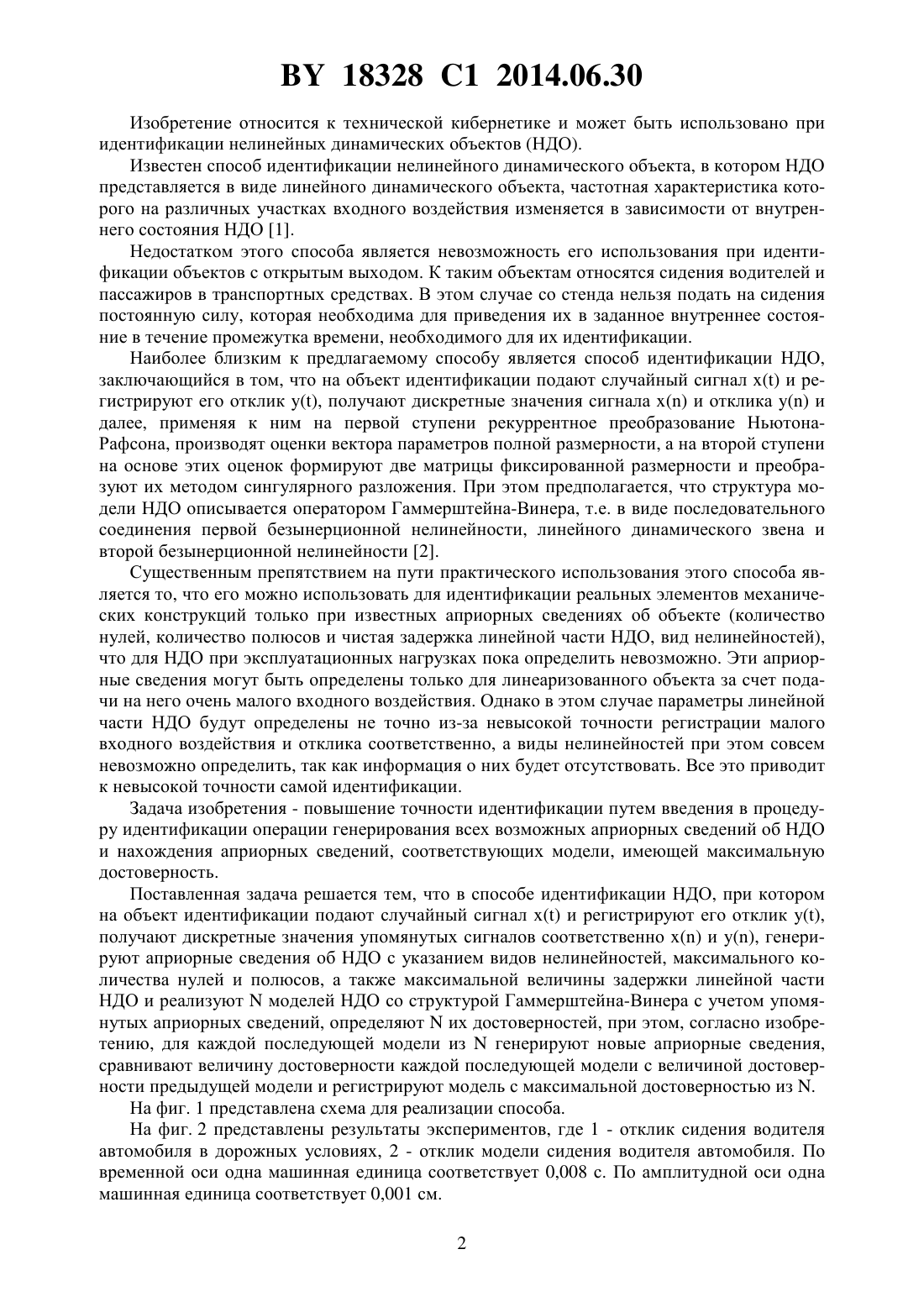
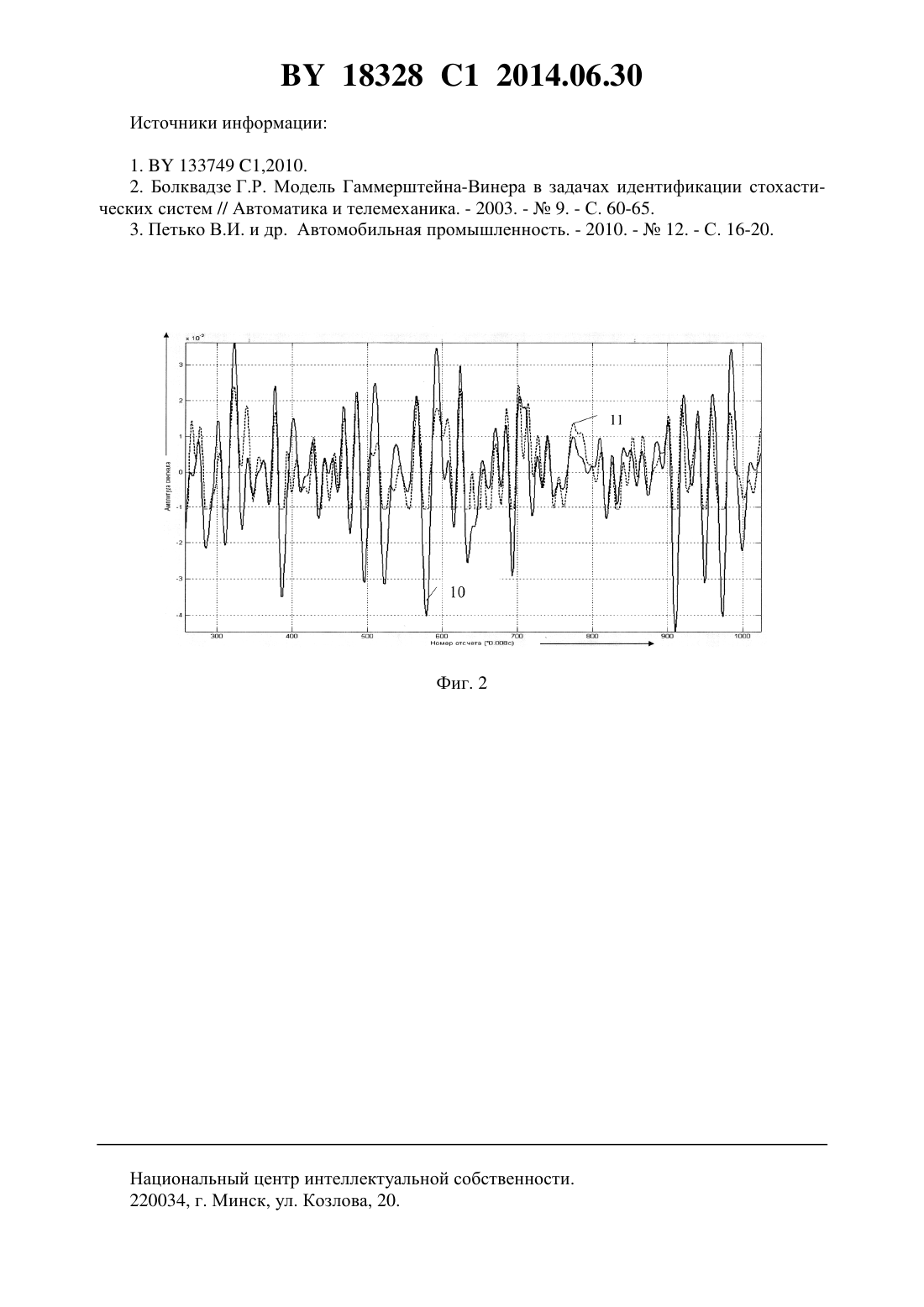
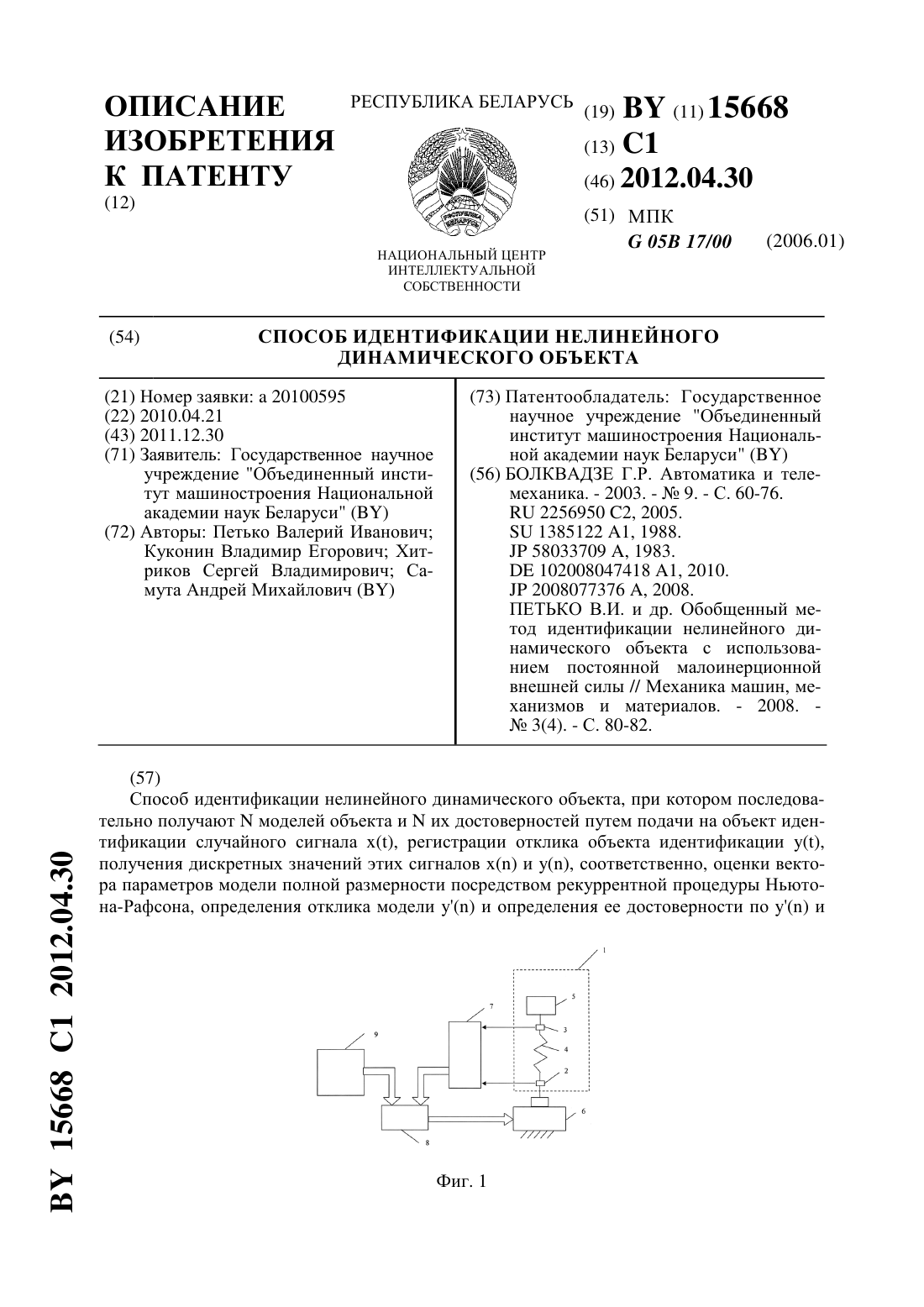
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ИДЕНТИФИКАЦИИ НЕЛИНЕЙНОГО ДИНАМИЧЕСКОГО ОБЪЕКТА(71) Заявитель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(72) Авторы Петько Валерий Иванович Хитриков Сергей Владимирович(73) Патентообладатель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(57) Способ идентификации нелинейного динамического объекта (НДО), при котором на объект идентификации подают случайный сигнали регистрируют отклик , получают дискретные значения упомянутых сигналов соответственнои , генерируют априорные сведения об НДО с указанием видов нелинейностей, максимального количества нулей и полюсов, а также максимальной величины чистой задержки линейной части НДО и реализуютмоделей НДО со структурой Гаммерштейна-Винера с учетом упомянутых априорных сведений, определяютих достоверностей, причем для каждой последующей модели изгенерируют новые априорные сведения, сравнивают величину достоверности каждой последующей модели с величиной достоверности предыдущей модели и регистрируют модель с максимальной достоверностью из . 18328 1 2014.06.30 Изобретение относится к технической кибернетике и может быть использовано при идентификации нелинейных динамических объектов (НДО). Известен способ идентификации нелинейного динамического объекта, в котором НДО представляется в виде линейного динамического объекта, частотная характеристика которого на различных участках входного воздействия изменяется в зависимости от внутреннего состояния НДО 1. Недостатком этого способа является невозможность его использования при идентификации объектов с открытым выходом. К таким объектам относятся сидения водителей и пассажиров в транспортных средствах. В этом случае со стенда нельзя подать на сидения постоянную силу, которая необходима для приведения их в заданное внутреннее состояние в течение промежутка времени, необходимого для их идентификации. Наиболее близким к предлагаемому способу является способ идентификации НДО,заключающийся в том, что на объект идентификации подают случайный сигнали регистрируют его отклик , получают дискретные значения сигналаи откликаи далее, применяя к ним на первой ступени рекуррентное преобразование НьютонаРафсона, производят оценки вектора параметров полной размерности, а на второй ступени на основе этих оценок формируют две матрицы фиксированной размерности и преобразуют их методом сингулярного разложения. При этом предполагается, что структура модели НДО описывается оператором Гаммерштейна-Винера, т.е. в виде последовательного соединения первой безынерционной нелинейности, линейного динамического звена и второй безынерционной нелинейности 2. Существенным препятствием на пути практического использования этого способа является то, что его можно использовать для идентификации реальных элементов механических конструкций только при известных априорных сведениях об объекте (количество нулей, количество полюсов и чистая задержка линейной части НДО, вид нелинейностей),что для НДО при эксплуатационных нагрузках пока определить невозможно. Эти априорные сведения могут быть определены только для линеаризованного объекта за счет подачи на него очень малого входного воздействия. Однако в этом случае параметры линейной части НДО будут определены не точно из-за невысокой точности регистрации малого входного воздействия и отклика соответственно, а виды нелинейностей при этом совсем невозможно определить, так как информация о них будет отсутствовать. Все это приводит к невысокой точности самой идентификации. Задача изобретения - повышение точности идентификации путем введения в процедуру идентификации операции генерирования всех возможных априорных сведений об НДО и нахождения априорных сведений, соответствующих модели, имеющей максимальную достоверность. Поставленная задача решается тем, что в способе идентификации НДО, при котором на объект идентификации подают случайный сигнали регистрируют его отклик ,получают дискретные значения упомянутых сигналов соответственнои , генерируют априорные сведения об НДО с указанием видов нелинейностей, максимального количества нулей и полюсов, а также максимальной величины задержки линейной части НДО и реализуютмоделей НДО со структурой Гаммерштейна-Винера с учетом упомянутых априорных сведений, определяютих достоверностей, при этом, согласно изобретению, для каждой последующей модели изгенерируют новые априорные сведения,сравнивают величину достоверности каждой последующей модели с величиной достоверности предыдущей модели и регистрируют модель с максимальной достоверностью из . На фиг. 1 представлена схема для реализации способа. На фиг. 2 представлены результаты экспериментов, где 1 - отклик сидения водителя автомобиля в дорожных условиях, 2 - отклик модели сидения водителяавтомобиля. По временной оси одна машинная единица соответствует 0,008 с. По амплитудной оси одна машинная единица соответствует 0,001 см. 2 18328 1 2014.06.30 Рассмотрим реализацию способа идентификации нелинейного объекта с помощью устройства, содержащего НДО 1, с датчиком 2 входного сигнала и датчиком 3 его отклика, безынерционную нелинейную пружину 4 и твердое тело 5 массой М, стенд 6 для задания входных сигналов, блок 7 аналого-цифрового преобразования (АЦП), ЭВМ 8 и блок генерации априорных сведений 9. Выход ЭВМ 8 соединен с управляющим входом стенда 6, выход которого механически жестко соединен с датчиком 2 входного сигнала, выход которого электрически соединен с первым входом блока 7 АЦП, другой вход которого соединен с выходом датчика 3 отклика НДО 1, выход блока 7 АЦП через первый интерфейс соединен с ЭВМ 8. Первый конец пружины 4 механически жестко связан с датчиком 2 входного сигнала, а другой - с датчиком 3 отклика НДО 1. Блок 9 генерации априорных сведений соединен своим выходом через второй интерфейс с ЭВМ 8. Работа устройства происходит следующим образом. В ЭВМ 8 с помощью генератора 9 заносятся первые априорные сведения (исходные данные) для идентификации НДО 11,т.е. виды нелинейностей (полиномиальный, насыщение, мертвая зона и др.), максимально допустимое количество нулей и полюсов, максимально допустимая величина чистой(транспортной) задержки линейной части НДО. На объект идентификации 1 с помощью стенда 6 подают случайный сигналс достаточно большой дисперсией, такой, чтобы отклик объектадостигал как можно больших значений. Входной случайный сигнал регистрируется с помощью датчика 2, а откликс помощью датчика 3. Из сигналов от датчиков 2 и 3 с помощью блока 7 АЦП получают дискретные значения сигналаи отклика , которые заносятся в ЭВМ 8. В ЭВМ 8 реализуется модель НДО 11 со структурой Гаммерштейна-Винера 3,например, по программе в пакете 2007 с заданным от генератора 9 набором начальных априорных сведений (например, первая и вторая безынерционные нелинейности полиномиальные, количество нулей равно единице, количество полюсов и чистая задержка равны нулю) и оценивают достоверность модели, значение которой и сформированную структуру модели сохраняют в памяти ЭВМ. Далее с генератора 9 в ЭВМ 8 поступают следующий набор априорных сведений и реализуют следующую модель НДО 12,оценивают ее достоверность, сравнивают ее с предыдущей достоверностью и большую из них и соответствующую ей структуру модели заносят в память ЭВМ и т.д. После завершения генерации всех возможных априорных сведений о НДО 1 в памяти ЭВМ 8 останется модель НДО 1 со структурой Гаммерштейна-Винера и с априорными сведениями, соответствующими максимальной ее достоверности. Пример реализации способа. В качестве НДО нами было взято сидение водителя автомобиля Минского завода колесных тягачей, на которое для имитации водителя помещался мешок с песком массой 75 кг. Входным воздействием служили величины перемещения пола кабины относительно состояния покоя, а откликом являлись величины перемещения мешка между полом кабины и самим сидением. По результатам эксперимента был построен график (фиг. 2), на котором 10 - отклик сидения водителя автомобиля в дорожных условиях, 11 - отклик модели сидения водителя автомобиля. По временной оси одна машинная единица соответствует 0,008 с. По амплитудной оси одна машинная единица соответствует 0,001 см. Из приведенного примера видно, что характерные изменения откликов объекта и его модели совпадают довольно точно, хотя достоверность модели получилась не очень высокой (56 ). При других способах учета априорных сведений об НДО достоверность модели выше 34 получать не удавалось. Таким образом, предложенный способ идентификации НДО оказывается существенно точнее известного за счет введения в процедуру идентификации операций генерирования всех возможных априорных сведений об НДО и автоматического перебора их с регистрацией модели, обладающей большей достоверностью. 3 18328 1 2014.06.30 Источники информации 1.133749 1,2010. 2. Болквадзе Г.Р. Модель Гаммерштейна-Винера в задачах идентификации стохастических систем // Автоматика и телемеханика. - 2003. -9. - С. 60-65. 3. Петько В.И. и др. Автомобильная промышленность. - 2010. -12. - С. 16-20. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: G05B 17/02
Метки: нелинейного, способ, динамического, объекта, идентификации
Код ссылки
<a href="https://by.patents.su/4-18328-sposob-identifikacii-nelinejjnogo-dinamicheskogo-obekta.html" rel="bookmark" title="База патентов Беларуси">Способ идентификации нелинейного динамического объекта</a>
Способ идентификации нелинейного динамического объекта
Номер патента: 15668
Опубликовано: 30.04.2012
Авторы: Самута Андрей Михайлович, Хитриков Сергей Владимирович, Петько Валерий Иванович, Куконин Владимир Егорович
МПК: G05B 17/00
Метки: динамического, идентификации, объекта, нелинейного, способ
Текст:
...значений 2 15668 1 2012.04.30 этих сигналови , соответственно, оценки вектора параметров модели полной размерности посредством рекуррентной процедуры Ньютона-Рафсона, определения отклика моделии определения ее достоверности пои , причем для каждой модели изгенерируют априорные сведения о нелинейном динамическом объекте с заданием вида нелинейности, максимально допустимого количества нулей и полюсов и максимально допустимой задержки путем...
Способ идентификации нелинейного динамического объекта
Номер патента: 13749
Опубликовано: 30.10.2010
Авторы: Самута Андрей Михайлович, Куконин Владимир Егорович, Петько Валерий Иванович, Выставная Елена Ивановна
МПК: G05B 17/00, G06F 17/14
Метки: динамического, нелинейного, идентификации, способ, объекта
Текст:
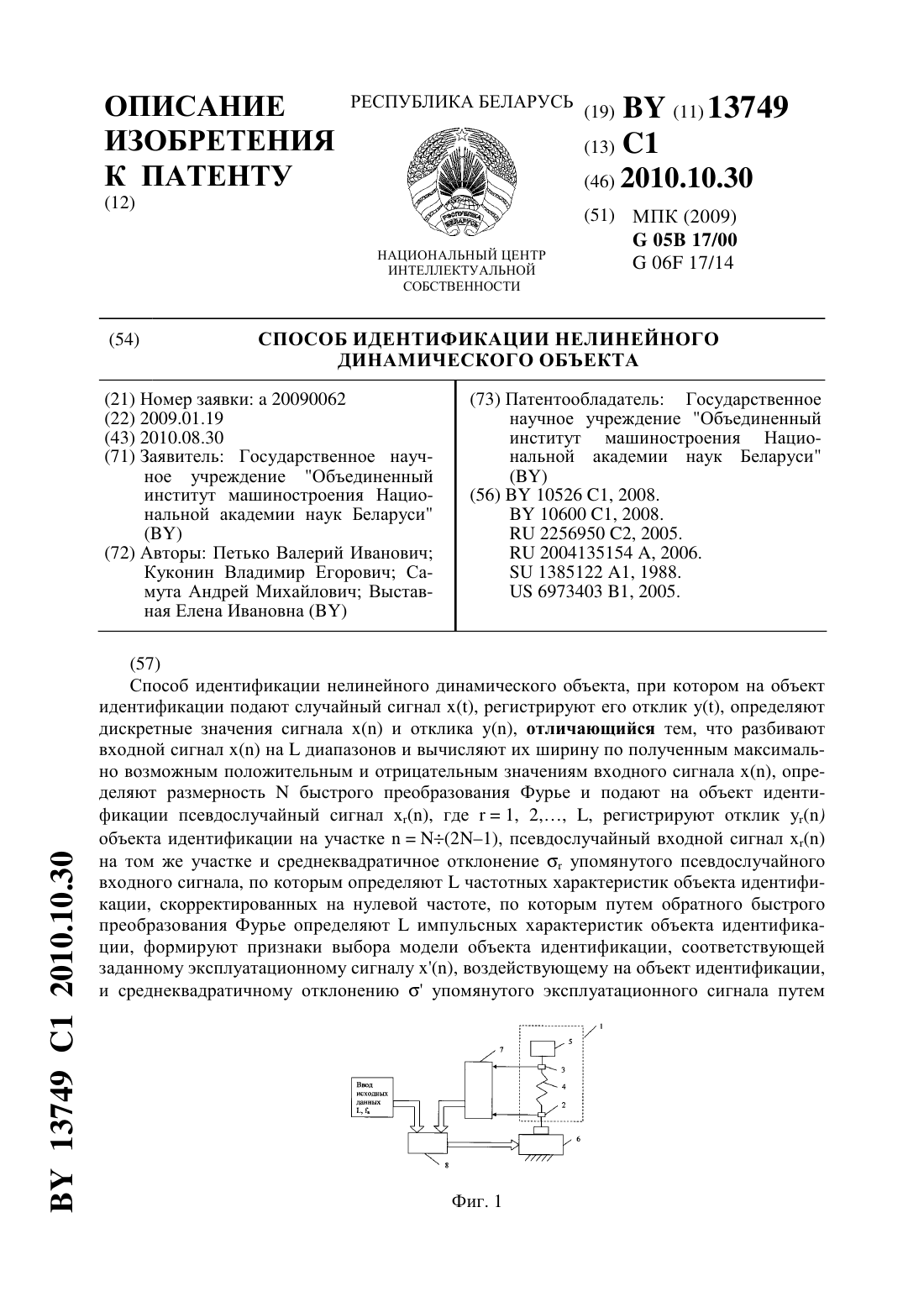
...идентификации в виде уравнений где у - отклик -й модели( ) - отсчеты -й импульсной характеристики объекта идентификации,определяют интервал в упомянутых моделях, которому соответствует , и осуществляют формирование модели объекта идентификации, причем корректировку упомянутыхчастотных характеристик объекта идентификации на нулевой частоте осуществляют путем принятия коэффициента 00 при быстром преобразовании Фурье отклика уг и коэффициента 00...
Способ идентификации нелинейного динамического объекта
Номер патента: 10526
Опубликовано: 30.04.2008
Авторы: Куконин Владимир Егорович, Выставная Елена Ивановна, Петько Валерий Иванович
МПК: G06G 7/00
Метки: способ, идентификации, объекта, динамического, нелинейного
Текст:
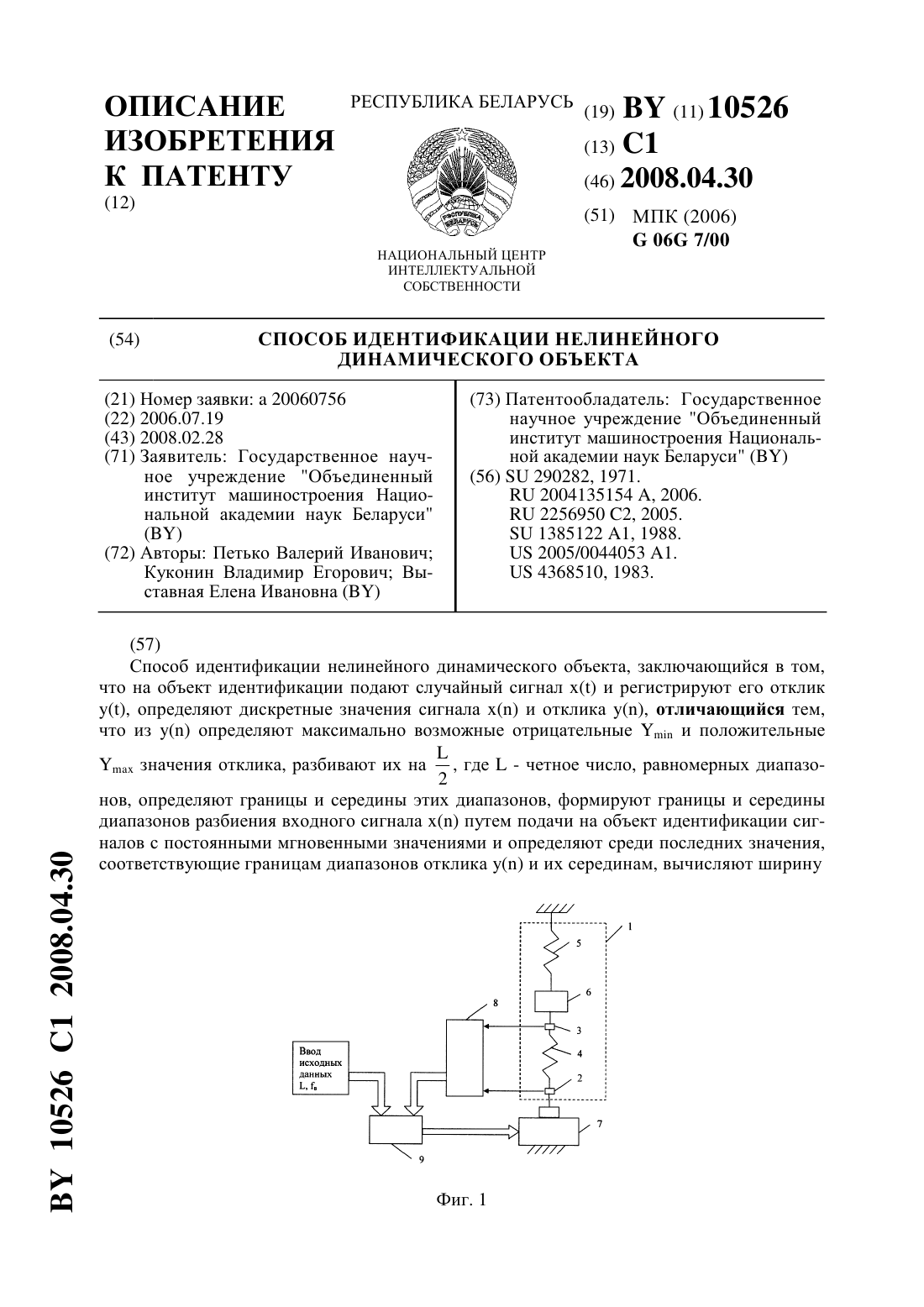
..., ) отклика НДО 1(1) . г г Для определения размерности дискретного преобразования Фурье (ДПФ), используемого при идентификации объекта, сначала определяют длину импульсной характеристики(ИХ) НДО 1. Для этого на вход НДО 1 с помощью стенда 7 подают небольшой испытательный сигнал Хи с постоянными мгновенными значениями и после установления отклика и резко убирают входной сигнал. Время от момента снятия сигнала до момента полного затухания...
Способ идентификации линейного динамического объекта

Номер патента: 10600
Опубликовано: 30.04.2008
Авторы: Петько Валерий Иванович, Куконин Владимир Егорович, Выставная Елена Ивановна
МПК: G06F 17/10, G06F 17/15, G05B 17/02...
Метки: способ, идентификации, линейного, объекта, динамического
Текст:
...входногои выходногосигналов линейного объекта в виде не менее(21) дискретных отсчетов и определяют коэффициенты модели, решая систему где- порядковый номер временного отсчета ( равняется от 0 до 2),- коэффициенты модели линейного динамического объекта ( равняется от 0 до ),причем разностное уравнение имеет вид Вследствие того, что модель (3) имеет нерекурсивную структуру, она оказывается устойчивой. В соответствии с предлагаемым способом...
Устройство для определения степени нелинейности нелинейного динамического объекта
Номер патента: U 4939
Опубликовано: 30.12.2008
Авторы: Петько Валерий Иванович, Куконин Владимир Егорович, Выставная Елена Ивановна
МПК: G06G 7/00
Метки: степени, устройство, динамического, нелинейности, нелинейного, определения, объекта
Текст:
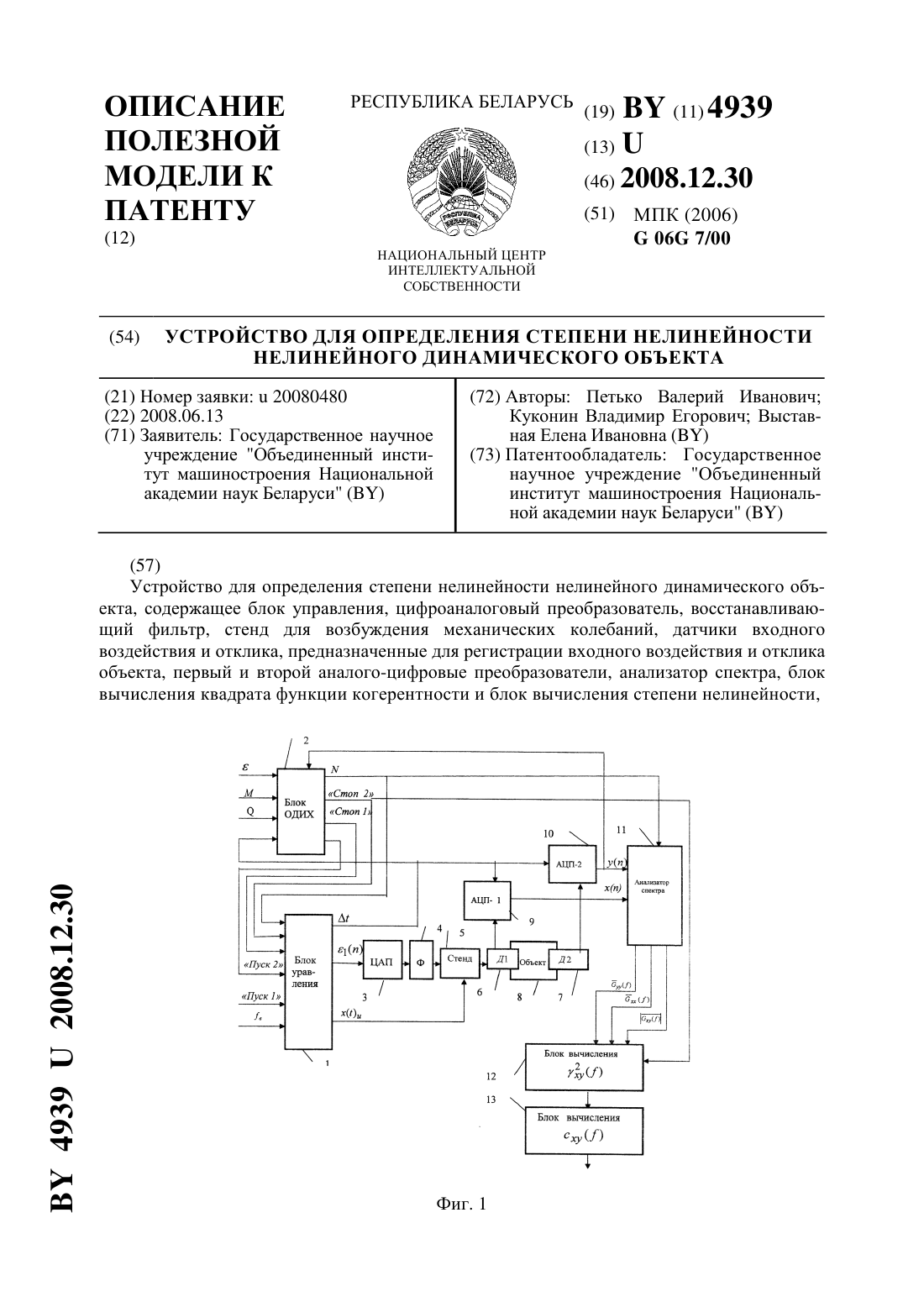
...для регистрации входного воздействия и отклика объекта 8, первый 9 и второй 10 аналого-цифровые преобразователи, анализатор 11 спектра, блок 12 вычисления квадрата функции когерентности и блок 13 вычисления степени нелинейности, причем первый выход блока 1 управления соединен со вторым входом стенда 5, второй выход блока 1 управления соединен со входом цифроаналогового преобразователя 3, выход которого соединен со входом...
Предыдущий патент: Способ получения материала для газовых сенсоров
Следующий патент: Способ получения гидроизоляционной битумно-полимерной композиции
Случайный патент: Устройство для формования преимущественно концевых участков тонкостенных трубчатых заготовок