Способ идентификации линейного динамического объекта
Номер патента: 10600
Опубликовано: 30.04.2008
Авторы: Петько Валерий Иванович, Куконин Владимир Егорович, Выставная Елена Ивановна




Текст
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ДИНАМИЧЕСКОГО ОБЪЕКТА(71) Заявитель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(72) Авторы Петько Валерий Иванович Куконин Владимир Егорович Выставная Елена Ивановна(73) Патентообладатель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(57) Способ идентификации линейного динамического объекта, согласно которому на линейный объект идентификации подают случайный сигнал , определяют дискретные значения входногои выходногосигналов линейного объекта, которые преобразуют в идентификаторе в детерминированные характеристики корреляции значений входного и вход-выходного сигналов линейного объекта и по разностному уравнению строят модель линейного динамического объекта идентификации, отличающийся тем, что в идентификаторе по детерминированным характеристикам корреляции значений входного и вход-выходного сигналов линейного объекта определяют порядокразностного уравнения модели линейного динамического объекта в единицах интервала дискретизации ,осуществляют регистрацию дискретных значений входногои выходногосигналов линейного объекта в виде не менее (21) дискретных отсчетов и определяют коэффициенты модели, решая систему (1) линейных уравнений где -порядковый номер временного отсчета ( равняется от 0 до 2),- коэффициенты модели линейного динамического объекта ( равняется от 0 до ),причем разностное уравнение имеет вид Изобретение относится к технической кибернетике и может быть использовано при идентификации линейных динамических объектов (ЛДО) в эксплуатационных условиях гидравлических, энергетических и тепловых объектов. Известен способ идентификации линеаризованного динамического объекта, включающий определение дискретных значений входногои выходногосигналов объекта с шагом дискретизациии последовательную их подачу на идентификатор непрерывной дроби с последующим восстановлением дискретной передаточной функции и прогнозирующей модели динамического объекта и определением модельных значений выходного сигнала объекта, причем определение экспериментальных дискретных значений входного и выходного сигналов объекта выполняют, начиная с нескольких исходных значений сигнала в пределах, определяемых выражениями 0, 1, ,гдеи- значения предельно допускаемых погрешностей применяемых средств измерения входного и выходного сигналов. В идентификаторе непрерывной дроби получают непрерывную дробь с несколькими интервальными коэффициентами, восстановление интервальной дискретной передаточной функции и прогнозирующей модели объекта производят по интервальным коэффициентам, определение модельных значений выходного сигнала объекта производят в интервальных значениях, ограниченных двумя прогнозирующими функциями с вещественными коэффициентами, задаваемыми значениями предельных допускаемых погрешностей измерения 1. Наиболее близким к предлагаемому способу является способ идентификации линейного динамического объекта путем определения значений входного и выходного сигналов объекта, подачи их на идентификатор непрерывной дроби с последующим восстановлением прогнозирующей модели объекта, в котором обработку значений случайного входного и выходного сигналов в идентификаторе непрерывной дроби и восстановление прогнозирующей модели объекта ведут последовательно, при этом значения входного и выходного сигналов в идентификаторе непрерывной дроби преобразуют в детерминированные характеристики корреляции значений входного и вход-выходного сигналов объекта с последующей их обработкой по формуле( ) 10600 1 2008.04.30 до выполнения правила останова, где 1- детерминированная характеристика корреляции значений входного сигнала объекта,0- детерминированная характеристика корреляций значений входвыходного сигналов объекта,1, 2, 3,1, 2, 3,2. Недостатком этого способа является неоправданно большое время построения модели. Это обусловлено тем, что в нем используется сложный идентификатор непрерывной дроби, который требует получения идентифицирующей матрицы, элементами которой являются отсчеты автокорреляционной функции входного сигнала объекта и взаимной корреляционной функции вход-выходных сигналов объекта и различные их преобразования,построения по элементам первого столбца этой матрицы непрерывной дроби. К тому же,идентификатор непрерывной дроби позволяет получить только передаточную функцию ,от которой надо еще переходить к модели в виде следующего разностного уравнения где- порядковый номер временного отсчета, - порядок разностного уравнения, используемого для построения модели ЛДО, - коэффициенты в нерекурсивной части модели ЛДО (0), - коэффициенты в рекурсивной части модели ЛДО (1). При этом коэффициентыиявляются коэффициентами классического дифференциального уравнения, описывающего ЛДО. Кроме того,рекурсивная структура используемого разностного уравнения (1) приводит к тому, что модель становится очень чувствительной к коэффициентами при неточном их вычислении модель получается неустойчивой, что может привести к невозможности построения модели. Неточность вычисления коэффициентовобусловлена ограниченностью разрядной сетки ЭВМ, но в большей степени наличием в реальном объекте помех и тем, что идеально линейных объектов на практике не бывает. Эти недостатки приводят к большому времени построения ЛДО или невозможности ее построения. Задача изобретения - сокращение времени построения модели линейного динамического объекта путем уменьшения количества вычислений, исключения операции определения передаточной функциии получении устойчивой модели. Поставленная задача решается тем, что в способе идентификации линейного динамического объекта (ЛДО), согласно которому на линейный объект идентификации подают случайный сигнал , определяют дискретные значения входногои выходногосигналов линейного объекта, которые преобразуют в идентификаторе в детерминированные характеристики корреляции значений входного и вход-выходного сигналов линейного объекта и по разностному уравнению строят модель линейного динамического объекта идентификации, причем согласно изобретению, в идентификаторе по детерминированным характеристикам корреляции значений входного и вход-выходного сигналов линейного объекта определяют порядокразностного уравнения модели линейного динамического объекта в единицах интервала дискретизации , осуществляют регистрацию дискретных значений входногои выходногосигналов линейного объекта в виде не менее(21) дискретных отсчетов и определяют коэффициенты модели, решая систему где- порядковый номер временного отсчета ( равняется от 0 до 2),- коэффициенты модели линейного динамического объекта ( равняется от 0 до ),причем разностное уравнение имеет вид Вследствие того, что модель (3) имеет нерекурсивную структуру, она оказывается устойчивой. В соответствии с предлагаемым способом построения модели ЛДО производятся следующие действия 1. На объект идентификации подают случайный сигнал . 2. Определяют дискретные значения входногои выходногосигналов объекта. 3. Преобразуют их в детерминированные характеристики корреляции значений входного и вход-выходного сигналов объекта. 4. Определяют длину импульсной характеристики ЛДО в единицах интервала дискретизациии принимают ее за порядокразностного уравнения, используемого для построения модели ЛДО по формуле где 2 - длина главного лепестка взаимной корреляционной функции вход-выходных сигналов ЛДО,1 - длина главного лепестка автокорреляционной функции входного сигнала ЛДО. 5. Подают на вход объекта воздействиеи после дискретизации регистрируют в и отклике ЛДОмассивы длиной (21). 6. Решают систему из (1) уравнений (2). В результате получают коэффициенты 7. Создают модель ЛДО в соответствии с разностным уравнением (3). Сравнение способов получения коэффициентов ,модели (1) в прототипе и в предлагаемом изобретении показывает, что в предлагаемом способе коэффициенты модели вычисляются быстрее. Это обусловлено тем, что известный способ требует вычисления полной идентифицирующей матрицы, элементами которой являются отсчеты автокорреляционной функции входного сигнала объекта и взаимной корреляционной функции входвыходных сигналов объекта и различные их преобразования, построения по элементам первого столбца этой матрицы непрерывной дроби. К тому же, идентификатор непрерывной дроби позволяет получить только передаточную функцию , от которой надо еще переходить к модели в виде разностного уравнения. В предлагаемом же изобретении вычисляются только две первые строки идентифицирующей матрицы (отсчеты автокорреляционной функции входного сигнала объекта и взаимной корреляционной функции входвыходных сигналов объекта) и решается система из 1 линейных уравнений. При этом вычисление самого значенияпренебрежимо мало. Поэтому в предлагаемом изобретении по сравнению с прототипом время построения модели ЛДО сокращается. На чертеже представлена схема для реализации способа. Устройство содержит входы 1, 2 модуля 3 аналого-цифровых преобразователей (АЦП),коррелятор 4, первый 5 и второй 6 входы идентификатора 7 ЛДО, причем идентификатор 7 10600 1 2008.04.30 содержит определитель 8 порядка разностного уравнения равного длине импульсной характеристики ЛДО в единицах интервала дискретизации и ЭВМ 9. Выход модуля 3 аналого-цифровых преобразователей через магистраль А соединен с первым входом 5 идентификатора 7 и с входом коррелятора 4, выход которого соединен со вторым входом 6 идентификатора 7, второй вход 6 идентификатора 7 соединен с входом определителя 8 порядка разностного уравнения, выход которого соединен с входом ЭВМ 9 идентификатора 7. Работа устройства происходит следующим образом. На вход ЛДО подается непрерывное случайное входное воздействиедостаточно большой длины, в результате чего на выходе ЛДО появляется отклик . Длину входного воздействия и соответственно отклика выбирают исходя из точности получения корреляционных характеристик. Процессы ичерез входы 1, 2 поступают на модуль аналого-цифровых преобразователей 3,который представляет собой набор из восьми АЦП, работающих параллельно под управлением ЭВМ 9. Эти процессы оцифровываются с помощью модуля АЦП с интервалом дискретизации , который выбирается исходя из теоремы Котельникова. Полученные дискретные значенияиподаются на вход коррелятора 4, в котором вычисляются автокорреляционная функция входного сигнала объекта и взаимная корреляционная функция вход-выходных сигналов объекта. Эти функции подаются на определитель 8 порядка разностного уравнения. По этим функциям, в определителе 8, используя формулу (3),определяют порядокразностного уравнения (1) модели ЛДО, который заносится в ЭВМ 9 и там запоминается. После этого из входного воздействия на ЛДОи его откликавыбирается участок такой длины, чтобы при последующей его дискретизации получилось не менее(21) дискретных временных отсчетов. Входное воздействие и отклик ЛДО оцифровываются с помощью модуля АЦП и заносятся в ЭВМ 9. В результате в ЭВМ 9 будут храниться два массива чисел. Один массив представляет последовательность , (-1),(0) длиной не менее (21), а другой массив , (-1),(0) такой же длины. Из этих массивов по (21) отсчетам в ЭВМ 9 с помощью разработанной программы формируется система из (1) линейных уравнений (2). Эти уравнения затем решаются в ЭВМ 9 и в результате получают значения коэффициентов, которые подставляются в модель ЛДО (3). Таким образом, модель оказывается готовой и выполняется останов операции идентификации. Пример реализации способа. Пусть имеем компьютерный ЛДО, описываемый следующим разностным уравнением Подадим на объект случайное входное воздействие( ) где- случайная фаза, равномерно распределенная в диапазоне от 0 до 2,2048,02047,и зафиксируем при этом отклик ЛДО . Вычислим взаимную корреляционную функциюпо формуле( ) где- задержкаотносительно , а черта надиозначает знак усреднения. Вычислим автокорреляционную функцию х по формуле Первые значения ух получились такими ух 9,08 8,03 7,1 8,42 10,15 10,29 8,8 6,3 3,26 0,23 -1,044 -0,31 0,56 0,23 0,6356 -0,0028 -0,2141 -0,0002 0,1266 -0,0019 -0,0918 0,0006 0,07 -0,0027. При этом длина главного лепестка взаимной корреляционной функции оказалась раной 9, а длина главного лепестка автокорреляционной функции - 1. Тогда порядокразностного уравнения, используемого для построения модели ЛДО в соответствии с формулой (4),будет равен 8. Используя массивыии зная величину 8, в соответствии с (2) составляем систему из 9 линейных уравнений для определения модельных коэффициентов. Эта система уравнений получилась такой В результате решения уравнения (9) найдены коэффициенты модели, которые прак тически совпали с коэффициентами заданного ЛДО. Поэтому оценивать погрешность идентификации нет смысла. 6 10600 1 2008.04.30 Таким образом, предложенный способ построения модели ЛДО оказывается существенно проще известного за счет получения коэффициентов модели путем предварительного определения порядка разностной модели, используя для этого только детерминированные характеристики корреляции значений входного и вход-выходного сигналов объекта, и решения системы 1 линейных уравнений. Вследствие этого, а также за счет получения устойчивой модели вычислительные затраты и соответственно время построения модели уменьшаются. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 7
МПК / Метки
МПК: G05B 17/02, G06F 17/10, G06F 17/15
Метки: идентификации, динамического, способ, линейного, объекта
Код ссылки
<a href="https://by.patents.su/7-10600-sposob-identifikacii-linejjnogo-dinamicheskogo-obekta.html" rel="bookmark" title="База патентов Беларуси">Способ идентификации линейного динамического объекта</a>
Способ измерения линейного перемещения объекта и устройство для его осуществления
Номер патента: 8210
Опубликовано: 30.06.2006
Авторы: Данилевский Леонид Николаевич, Данилевский Сергей Леонидович, Зайцев Александр Иванович, Таурогинский Бронислав Иванович
МПК: G01B 11/04, G01B 7/04, G01C 22/00...
Метки: объекта, осуществления, устройство, измерения, перемещения, линейного, способ
Текст:
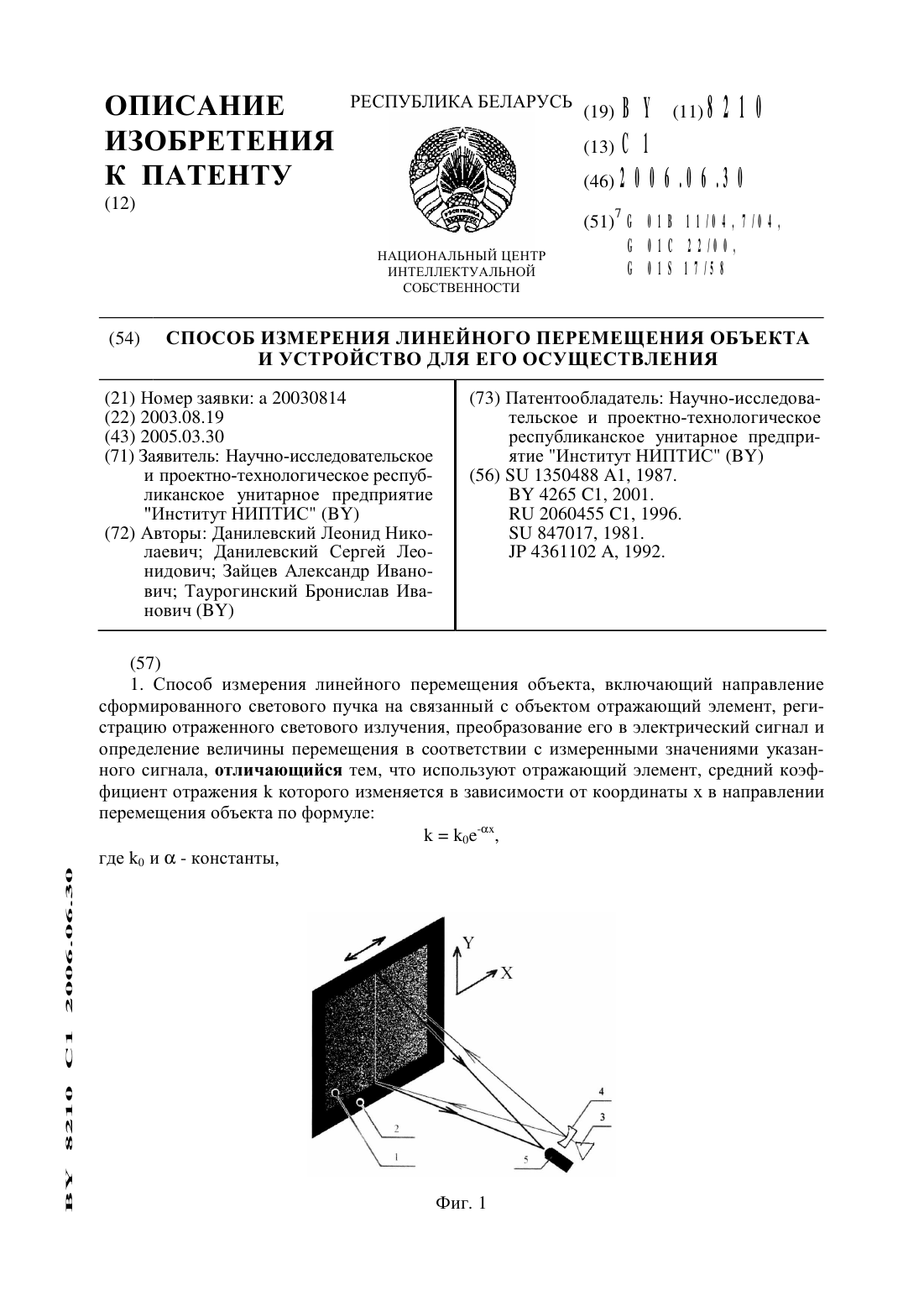
...изменяют в направлении перемещения по формуле1 Кое-ш, (1) где 1 о и ос - константы х - координата точки отражающего элемента в направлении движения объекта, пучок света растягивают в прямую линию постоянной толщины, перпен 2дикулярную направлению движения, И преобразуют отраженное излучение в электрический сигнал, измеряют его амплитуды 1101) и 1102) в Моменты времени п, г соответственно и по измеренным значениям определяют величину (1...
Система для регулирования выходной координаты динамического объекта
Номер патента: 8824
Опубликовано: 30.12.2006
Авторы: Мацкевич Артур Николаевич, Розсудовский Сергей Викторович
МПК: G05B 17/02, G05B 11/01
Метки: выходной, динамического, координаты, объекта, система, регулирования
Текст:
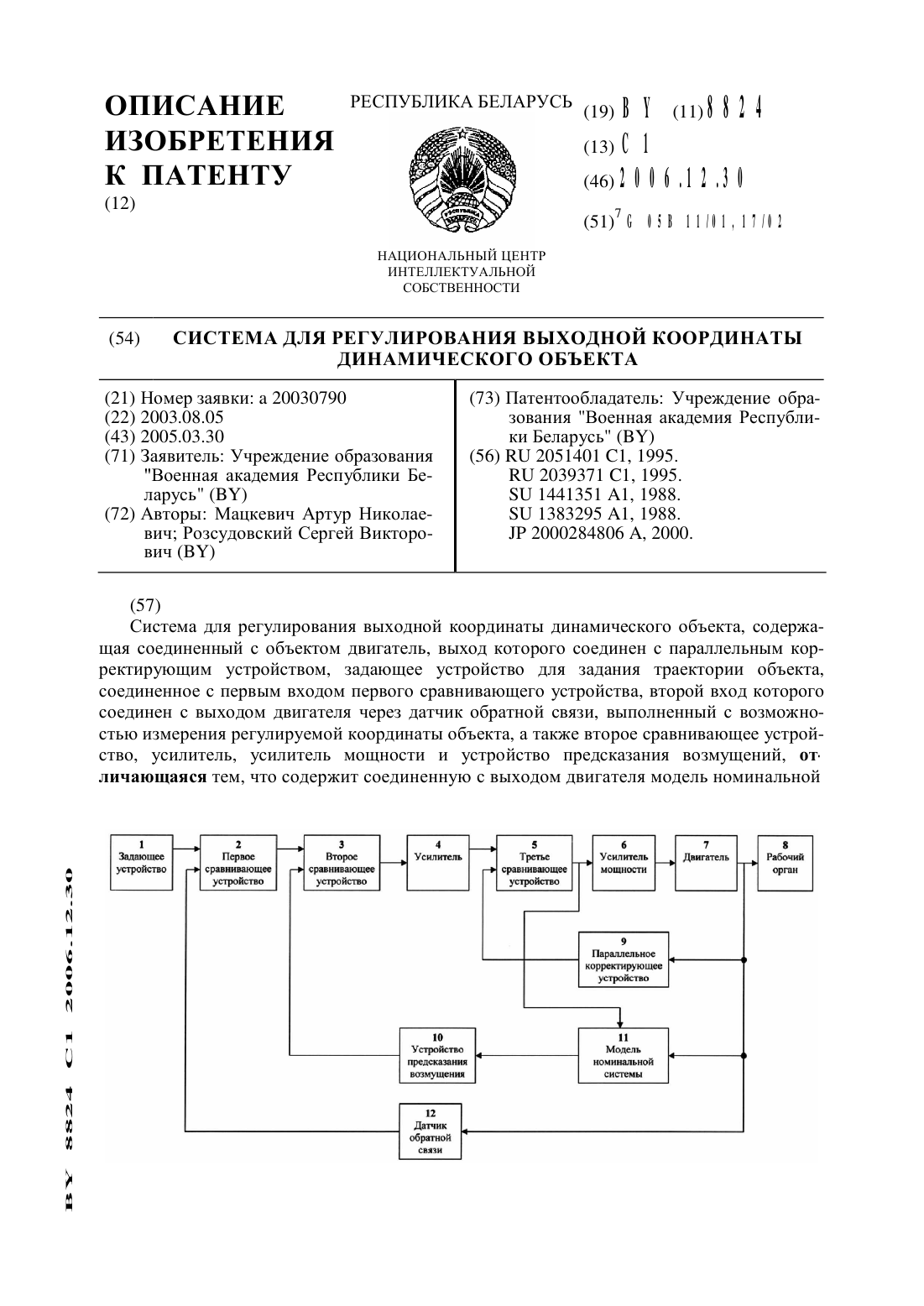
...сравнивающего устройства соединены с первым сравнивающим устройством, устройством предсказания возмущений и усилителем соответственно. При этом из устройства-прототипа исключаются генератор случайных чисел,стохастический регулятор, схема управления и ключ.На фигуре представлена функциональная схема системы для регулирования выходной координаты динамического объекта.Функциональная схема системы для регулирования выходной координаты...
Способ динамического хранения информации
Номер патента: 4464
Опубликовано: 30.06.2002
Авторы: Солонович Иван Федорович, Пилипович Владимир Антонович, Поседько Валерий Сергеевич, Есман Александр Константинович
МПК: G11B 7/00
Метки: способ, динамического, хранения, информации
Текст:
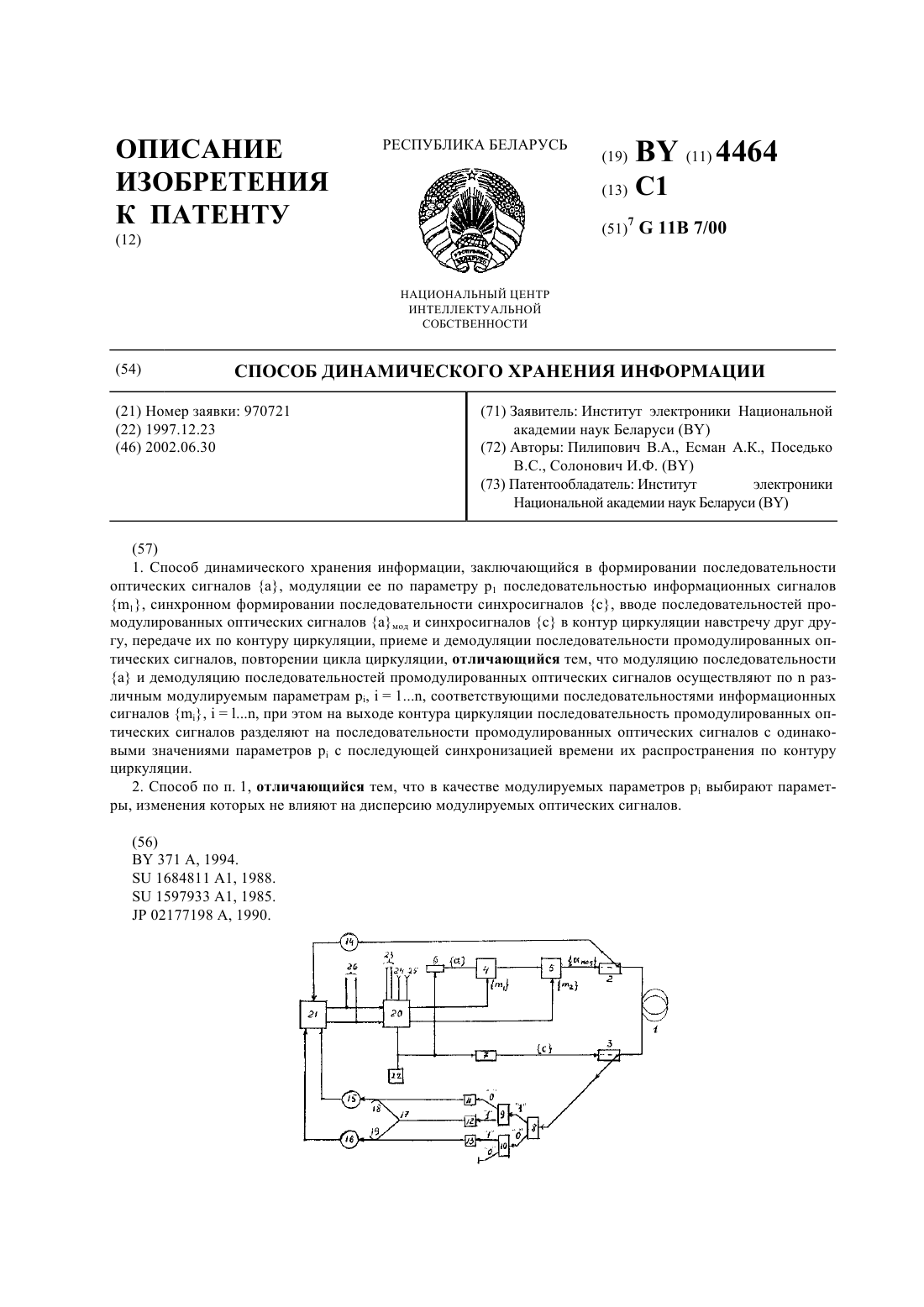
...оптических сигналов 7 - формирователь синхросигналов 8 - 1-селектор 9, 10 - 2-селекторы 11-13 - регулируемые линии задержки 14-16 - фотоприемники 17 - разветвитель 18, 19 - ответвители 20 - коммутатор 21 - буферный регистр 22 - генератор тактовых импульсов 23 - шина входных данных 24 - вход управления записью 25 - вход управления циркуляцией 26 - шина выходных данных. Работа осуществляется следующим образом. На шину входных данных 23...
Способ динамического испытания основания и фундамента здания или сооружения
Номер патента: 3858
Опубликовано: 30.03.2001
Авторы: Антохов Сергей Иванович, Кудрявцев Игорь Александрович
МПК: G01M 19/00, G01M 7/00
Метки: фундамента, динамического, способ, здания, основания, сооружения, испытания, или
Текст:
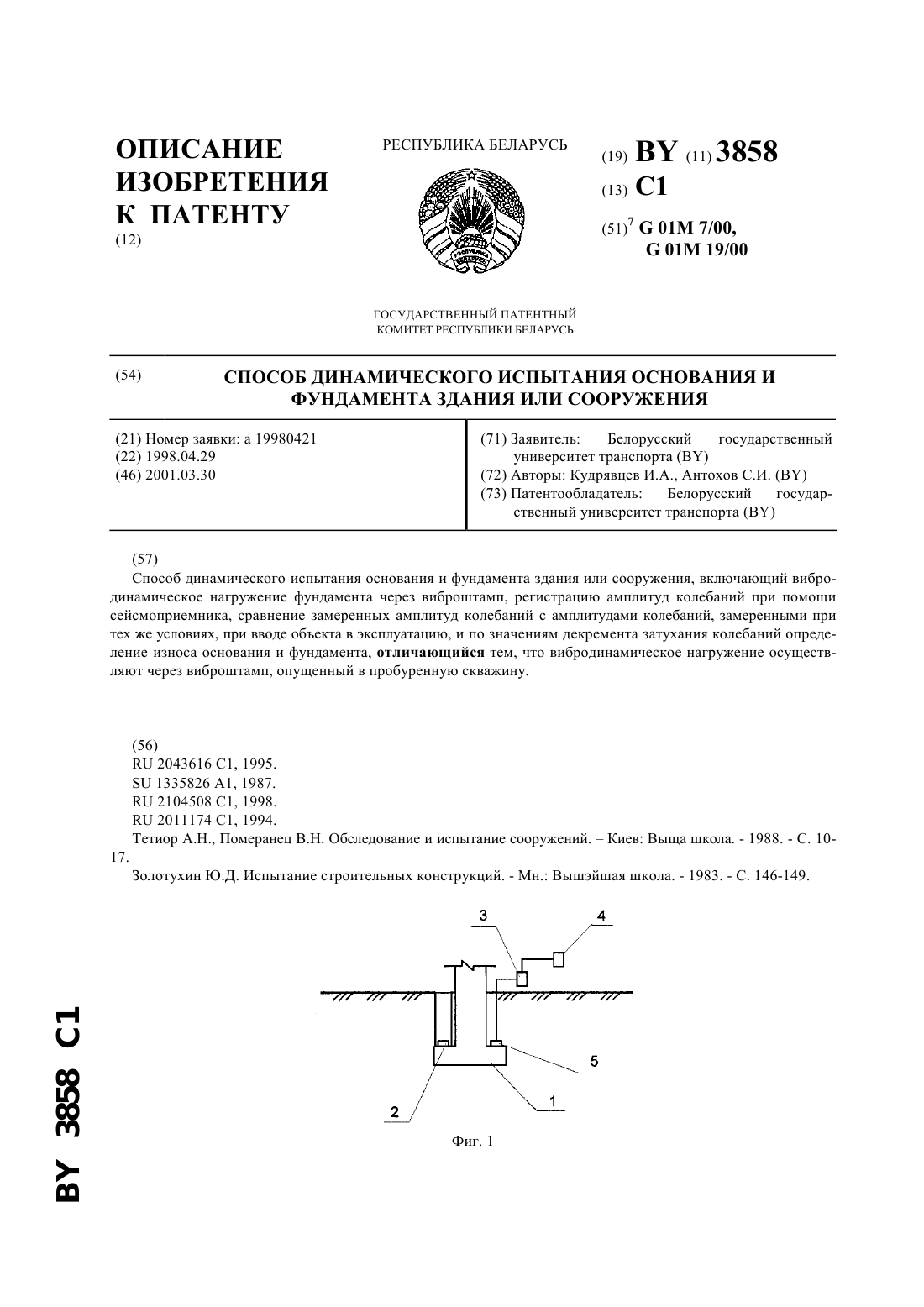
...параллельно через упругие связи с несущим изделием тела 3. Наиболее близким к заявляемому способу является способ динамического испытания здания, заключающийся в приложение вибрационной нагрузки через виброштамп к поверхности грунта возле обследуемого здания и измерения при помощи сейсмоприемника амплитуд колебаний внутри здания, которые сравнивают с амплитудой колебания, замеренной ранее в тех же точках здания при вводе здания в...
Способ динамического хранения информации

Номер патента: 2264
Опубликовано: 30.09.1998
Авторы: Солонович И. Ф., Пилипович В. А., Поседько В. С., Гончаренко И. А., Есман А. К.
МПК: G11B 7/00
Метки: информации, хранения, способ, динамического
Текст:
...сигналов, и тем самым осуществить временное уплотнение сигналов в оптическом канале для увеличения информационной емкости. В качестве вспомогательной последовательности в предлагаемом способе может использоваться последовательность синхросигналов, временные параметры которой согласованы с параметрами информационных сигналов. В этом случае циркуляция информационной и синхронизирующей последовательностей осуществляется по одному...
Предыдущий патент: Соус из растительного сырья и способ его производства
Следующий патент: Способ диффузии бора из твердых источников бора при изготовлении полупроводниковых приборов и интегральных микросхем
Случайный патент: Газовый пульсирующий эжектор