Хитриков Сергей Владимирович
Способ идентификации нелинейного динамического объекта
Номер патента: 18328
Опубликовано: 30.06.2014
Авторы: Петько Валерий Иванович, Хитриков Сергей Владимирович
МПК: G05B 17/02
Метки: способ, динамического, идентификации, объекта, нелинейного
Текст:
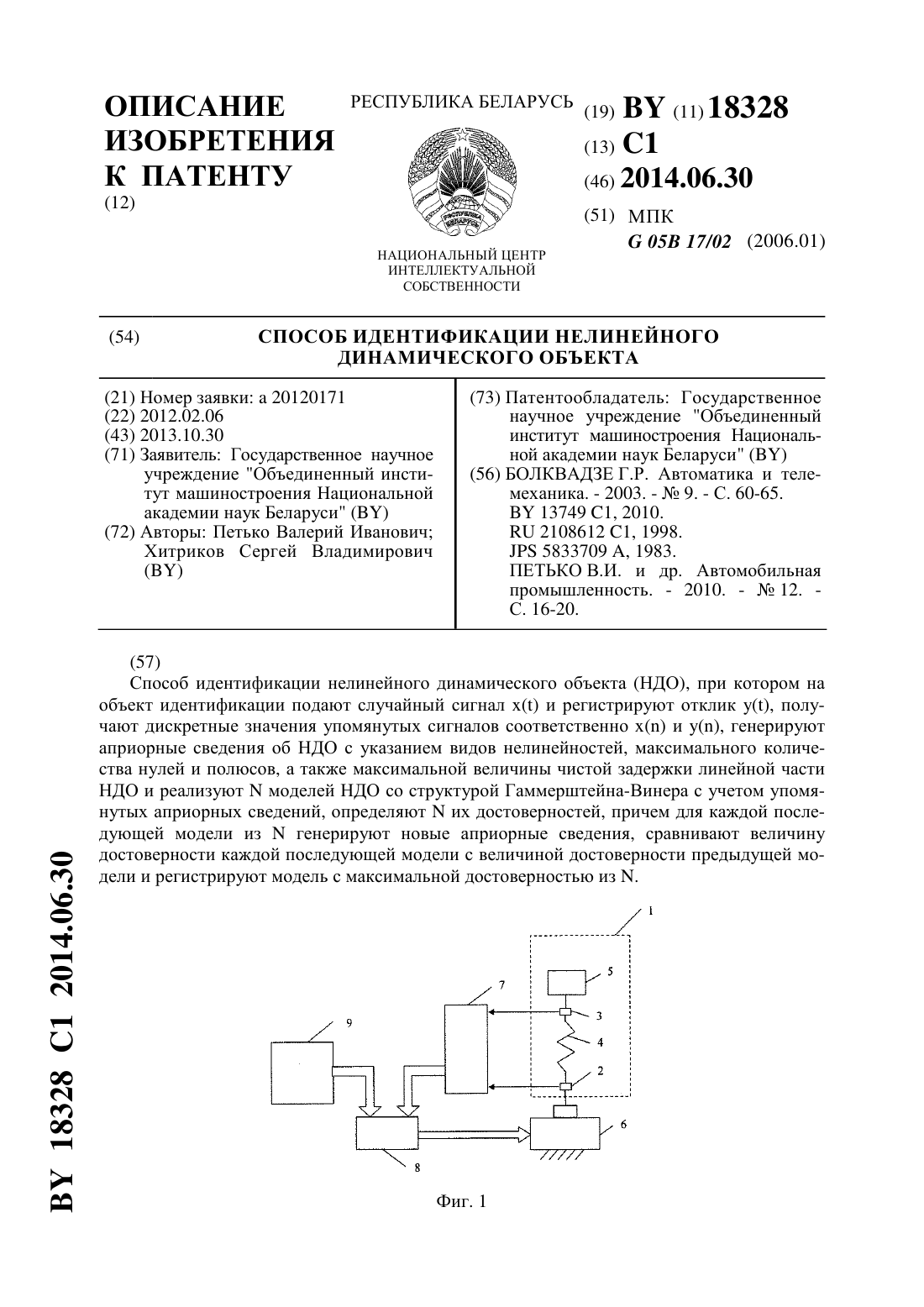
...определяютих достоверностей, при этом, согласно изобретению, для каждой последующей модели изгенерируют новые априорные сведения,сравнивают величину достоверности каждой последующей модели с величиной достоверности предыдущей модели и регистрируют модель с максимальной достоверностью из . На фиг. 1 представлена схема для реализации способа. На фиг. 2 представлены результаты экспериментов, где 1 - отклик сидения водителя автомобиля в...
Способ частотно-временного преобразования случайного сигнала нелинейного динамического объекта
Номер патента: 16579
Опубликовано: 30.12.2012
Авторы: Петько Валерий Иванович, Хитриков Сергей Владимирович, Куконин Владимир Егорович
МПК: G01R 23/16
Метки: динамического, частотно-временного, нелинейного, сигнала, преобразования, объекта, случайного, способ
Текст:
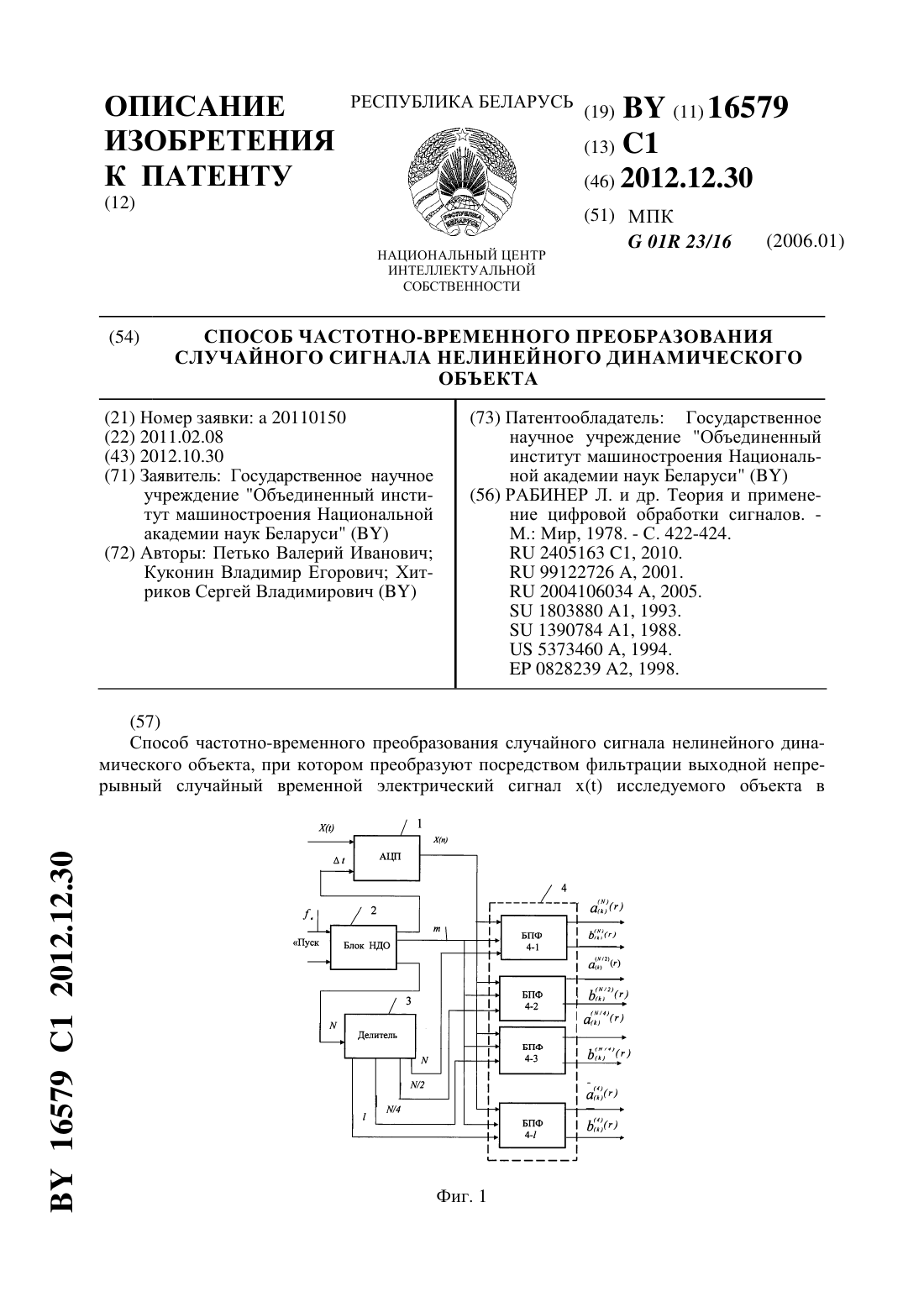
...большего числа из ряда чисел 2 (2, 3,). По длинеимпульсной характеристики объекта в блоках 4-1, 4-2, 4-3, , 4- скользящих БПФ преобразователя 4 находят количествоскольжений. При этомдолжно превышать длинуимпульсной характеристики объекта. Это требование исходит из то 3 16579 1 2012.12.30 го, что динамические свойства объекта полностью проявляются только на временном участке, равном или большем длины импульсной характеристики объекта. По...
Способ идентификации нелинейного динамического объекта
Номер патента: 15668
Опубликовано: 30.04.2012
Авторы: Хитриков Сергей Владимирович, Куконин Владимир Егорович, Самута Андрей Михайлович, Петько Валерий Иванович
МПК: G05B 17/00
Метки: нелинейного, динамического, идентификации, объекта, способ
Текст:
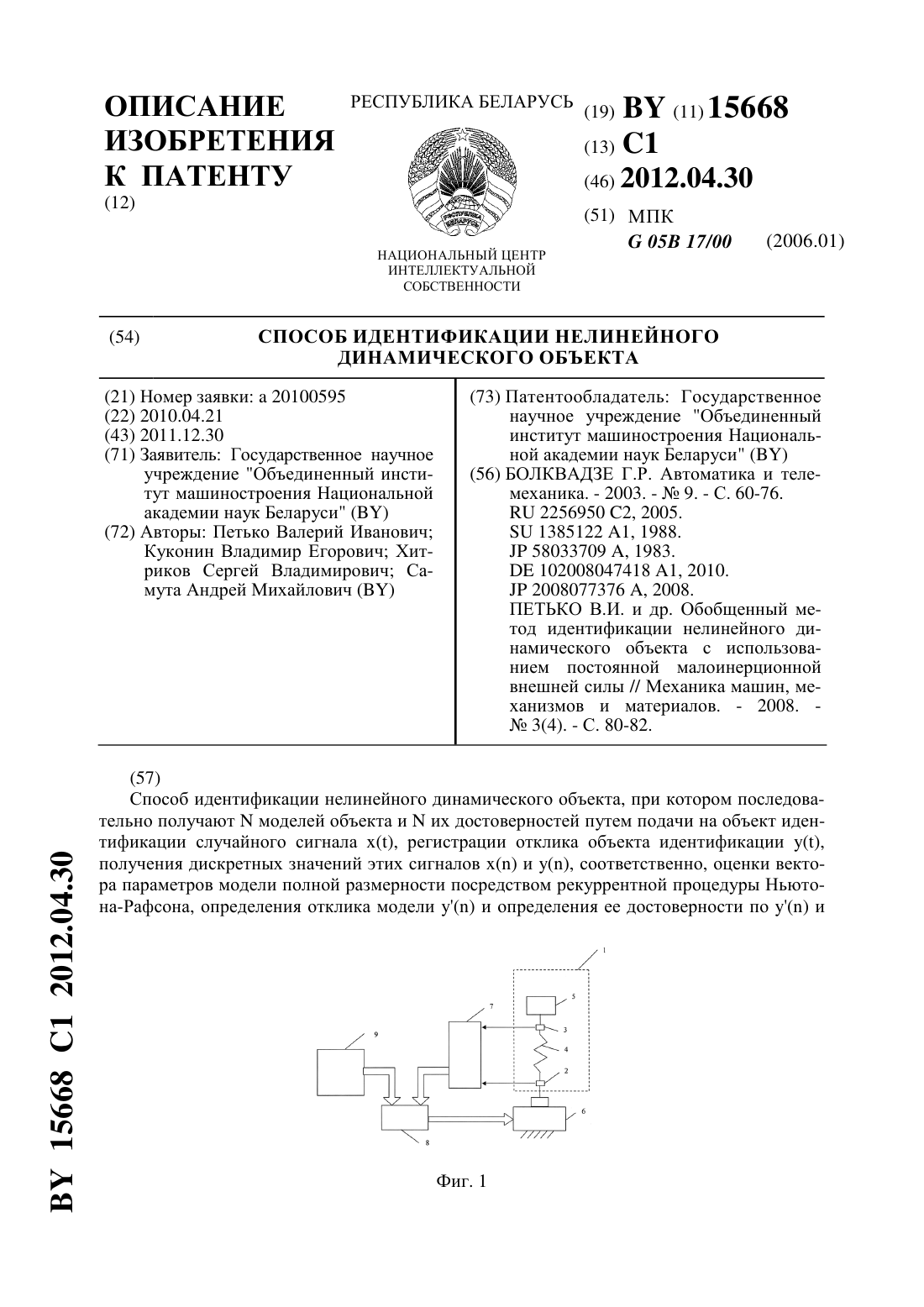
...значений 2 15668 1 2012.04.30 этих сигналови , соответственно, оценки вектора параметров модели полной размерности посредством рекуррентной процедуры Ньютона-Рафсона, определения отклика моделии определения ее достоверности пои , причем для каждой модели изгенерируют априорные сведения о нелинейном динамическом объекте с заданием вида нелинейности, максимально допустимого количества нулей и полюсов и максимально допустимой задержки путем...