Способ идентификации нелинейного динамического объекта
Номер патента: 13749
Опубликовано: 30.10.2010
Авторы: Самута Андрей Михайлович, Петько Валерий Иванович, Выставная Елена Ивановна, Куконин Владимир Егорович
Текст
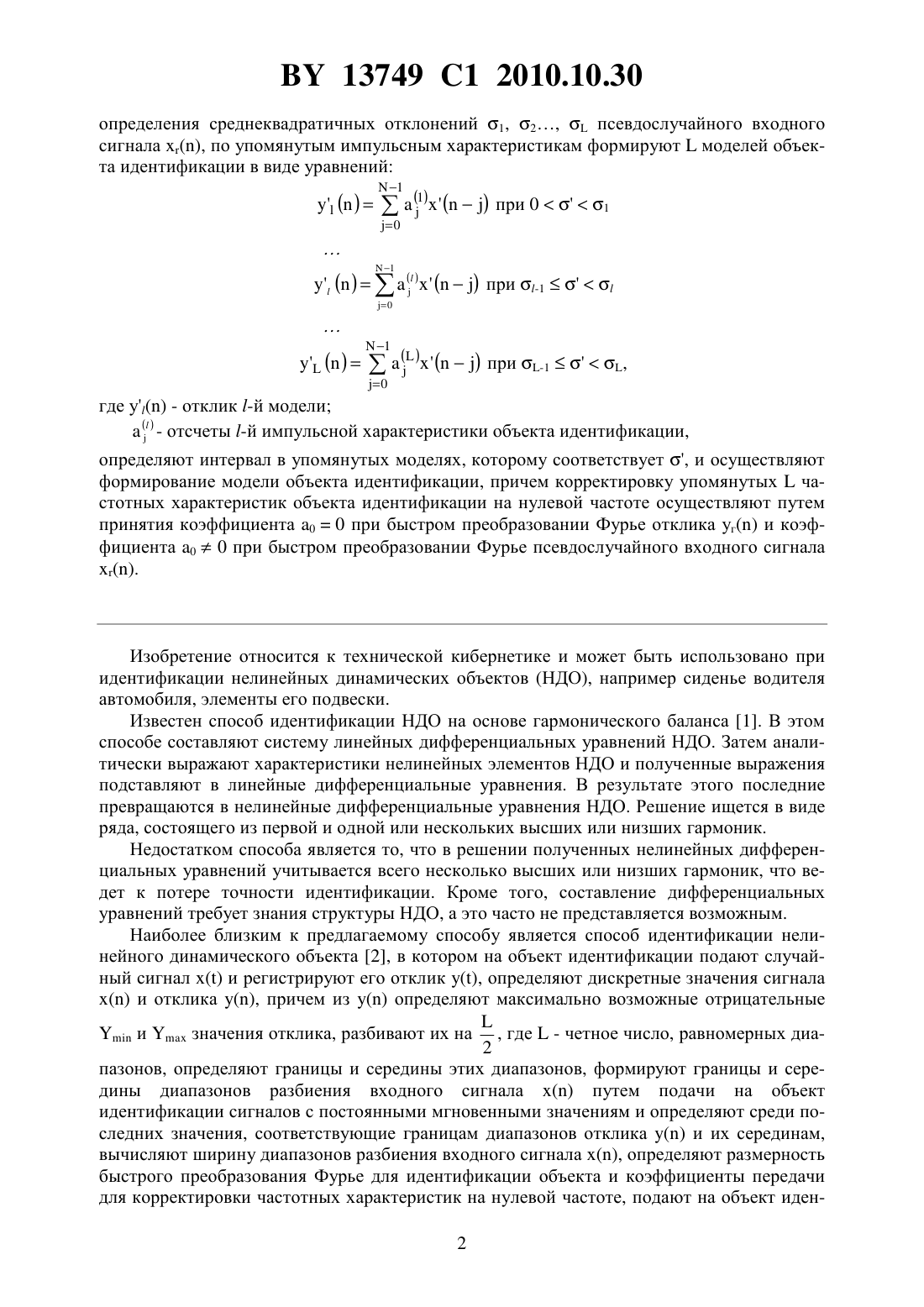
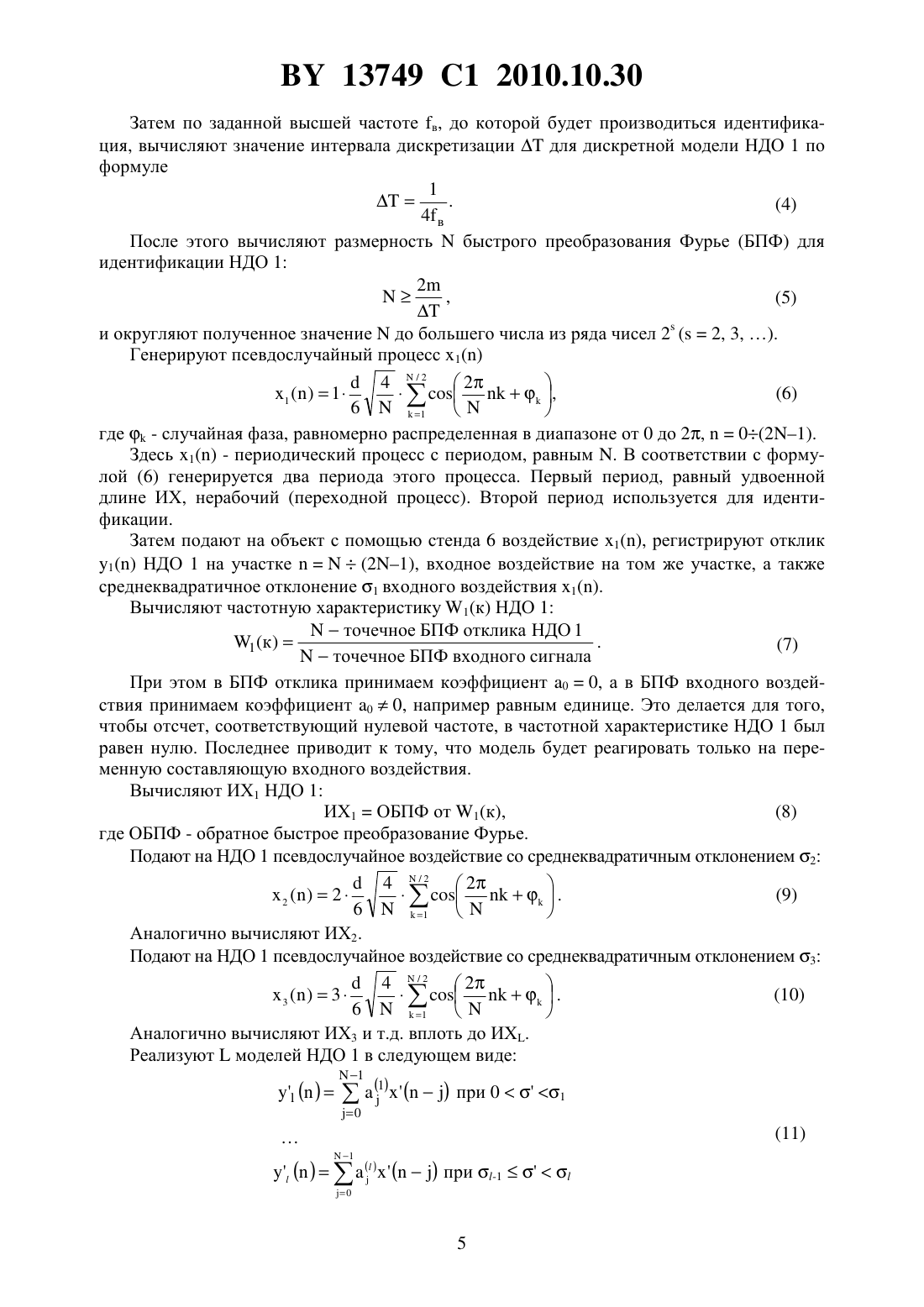
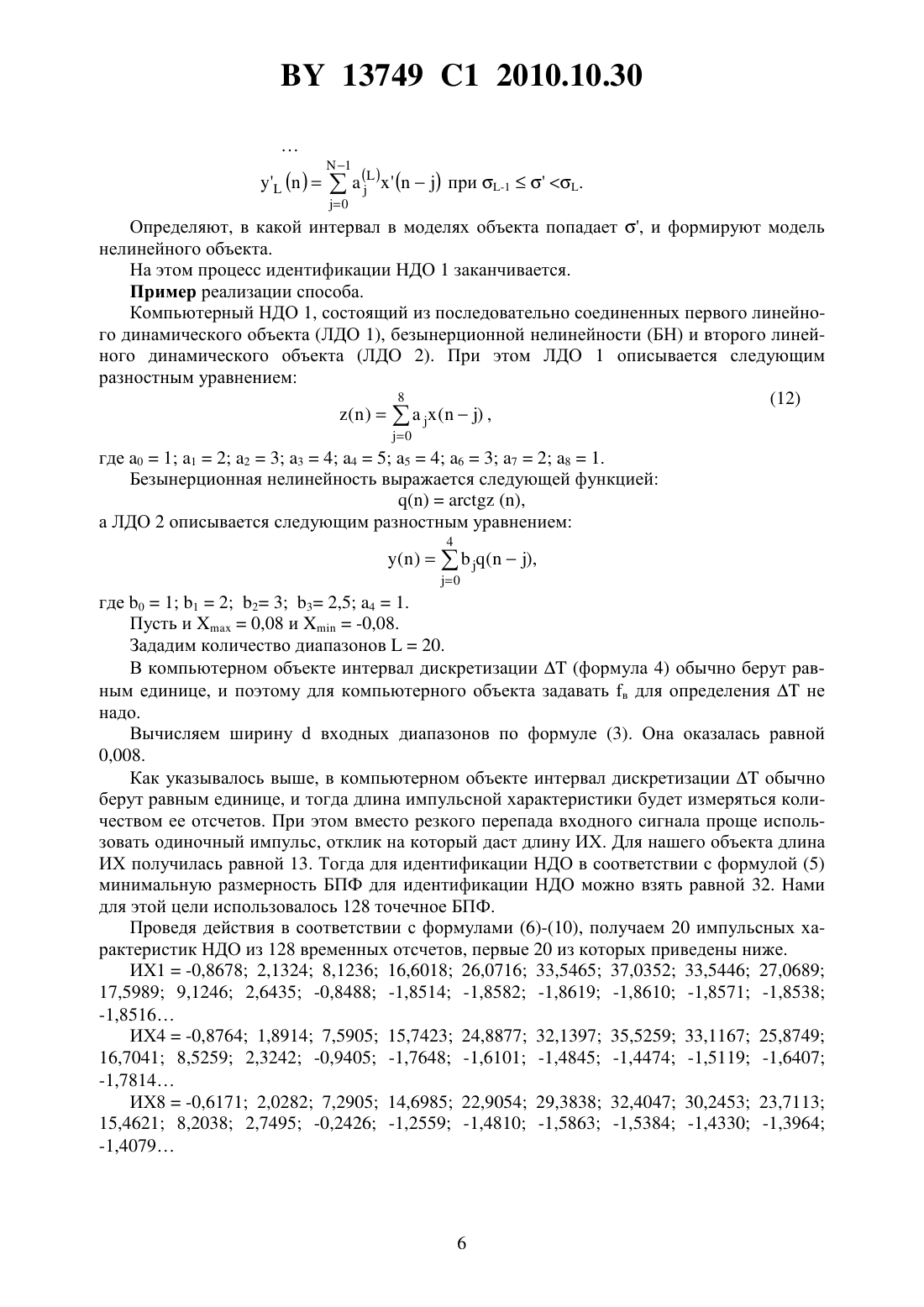
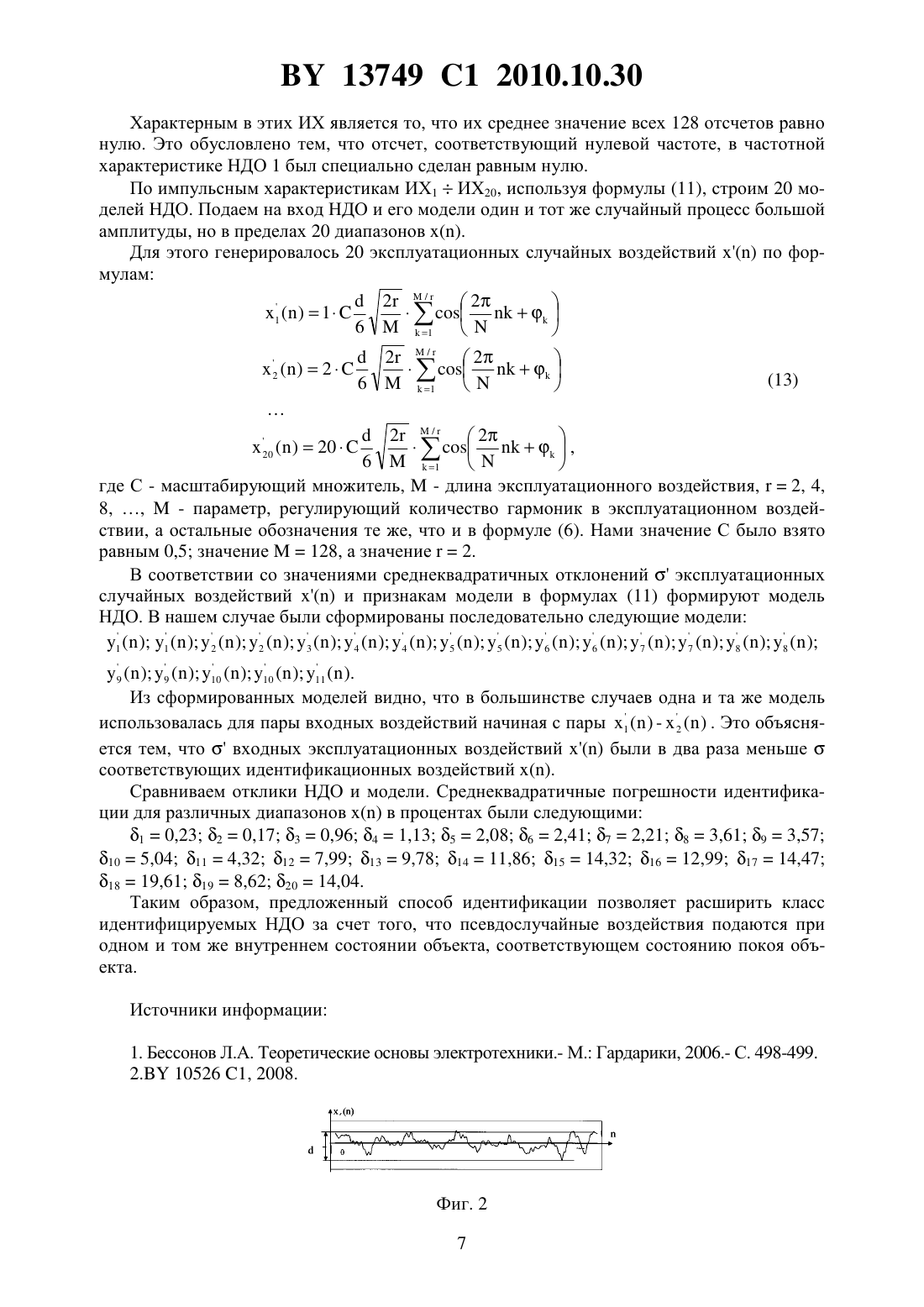
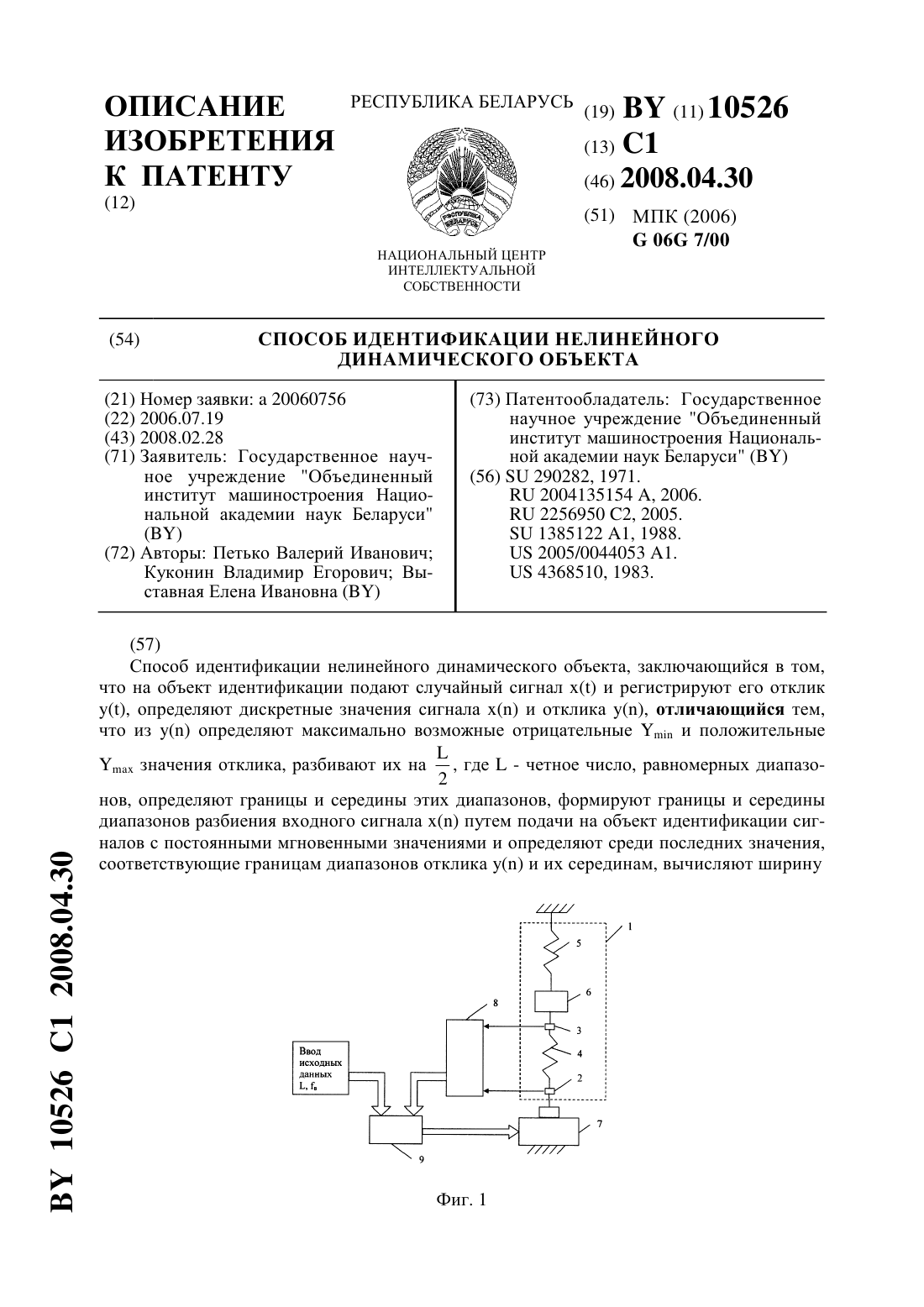
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ИДЕНТИФИКАЦИИ НЕЛИНЕЙНОГО ДИНАМИЧЕСКОГО ОБЪЕКТА(71) Заявитель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(72) Авторы Петько Валерий Иванович Куконин Владимир Егорович Самута Андрей Михайлович Выставная Елена Ивановна(73) Патентообладатель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(57) Способ идентификации нелинейного динамического объекта, при котором на объект идентификации подают случайный сигнал , регистрируют его отклик , определяют дискретные значения сигналаи отклика , отличающийся тем, что разбивают входной сигналнадиапазонов и вычисляют их ширину по полученным максимально возможным положительным и отрицательным значениям входного сигнала , определяют размерностьбыстрого преобразования Фурье и подают на объект идентификации псевдослучайный сигнал , где 1, 2 , регистрируют отклик у объекта идентификации на участке(21), псевдослучайный входной сигнална том же участке и среднеквадратичное отклонениеупомянутого псевдослучайного входного сигнала, по которым определяютчастотных характеристик объекта идентификации, скорректированных на нулевой частоте, по которым путем обратного быстрого преобразования Фурье определяютимпульсных характеристик объекта идентификации, формируют признаки выбора модели объекта идентификации, соответствующей заданному эксплуатационному сигналу , воздействующему на объект идентификации,и среднеквадратичному отклонениюупомянутого эксплуатационного сигнала путем 13749 1 2010.10.30 определения среднеквадратичных отклонений 1, 2,псевдослучайного входного сигнала , по упомянутым импульсным характеристикам формируютмоделей объекта идентификации в виде уравнений где у - отклик -й модели( ) - отсчеты -й импульсной характеристики объекта идентификации,определяют интервал в упомянутых моделях, которому соответствует , и осуществляют формирование модели объекта идентификации, причем корректировку упомянутыхчастотных характеристик объекта идентификации на нулевой частоте осуществляют путем принятия коэффициента 00 при быстром преобразовании Фурье отклика уг и коэффициента 00 при быстром преобразовании Фурье псевдослучайного входного сигнала Изобретение относится к технической кибернетике и может быть использовано при идентификации нелинейных динамических объектов (НДО), например сиденье водителя автомобиля, элементы его подвески. Известен способ идентификации НДО на основе гармонического баланса 1. В этом способе составляют систему линейных дифференциальных уравнений НДО. Затем аналитически выражают характеристики нелинейных элементов НДО и полученные выражения подставляют в линейные дифференциальные уравнения. В результате этого последние превращаются в нелинейные дифференциальные уравнения НДО. Решение ищется в виде ряда, состоящего из первой и одной или нескольких высших или низших гармоник. Недостатком способа является то, что в решении полученных нелинейных дифференциальных уравнений учитывается всего несколько высших или низших гармоник, что ведет к потере точности идентификации. Кроме того, составление дифференциальных уравнений требует знания структуры НДО, а это часто не представляется возможным. Наиболее близким к предлагаемому способу является способ идентификации нелинейного динамического объекта 2, в котором на объект идентификации подают случайный сигнали регистрируют его отклик , определяют дискретные значения сигнала и отклика , причем изопределяют максимально возможные отрицательные изначения отклика, разбивают их на , где- четное число, равномерных диа 2 пазонов, определяют границы и середины этих диапазонов, формируют границы и середины диапазонов разбиения входного сигналапутем подачи на объект идентификации сигналов с постоянными мгновенными значениям и определяют среди последних значения, соответствующие границам диапазонов откликаи их серединам,вычисляют ширину диапазонов разбиения входного сигнала , определяют размерность быстрого преобразования Фурье для идентификации объекта и коэффициенты передачи для корректировки частотных характеристик на нулевой частоте, подают на объект иден 2 13749 1 2010.10.30 тификации суммарные сигналы с постоянными мгновенными значениями, равными серединам диапазонов входного сигнала , и псевдослучайными мгновенными значениями, где 1, 2 , размах которых выбирают таким, чтобы размах отклика объекта идентификации не выходил за пределы соответствующего диапазона, и по ним и соответствующим им откликам у определяютчастотных характеристик, скорректированных на нулевой частоте, по которым путем обратного дискретного преобразования Фурье определяютимпульсных характеристик объекта идентификации в серединах диапазонов разбиения входного сигнала, а после определения дискретных значений входного сигнала формируют из последнего частичные входные сигналыпутем представления дискретных отсчетовв виде числовых отрезков, разбиения их на диапазоны входного сигнала и вычисления отсчетовкак части числовых отрезков, попадающие в -й диапазон входного сигнала, и создают модель объекта идентификации в виде уравнения где 1 - количество дискретных отсчетов в -й импульсной характеристике- -й отсчет -й импульсной характеристики- последовательность задержанных надискретных отсчетов частичного входного сигнала- последовательность дискретных отсчетов входного сигнала с интервалом дискретизации не менее 16 отсчетов на верхнюю частоту в спектре входного сигнала. Недостатком этого способа является невозможность его использования при идентификации объектов с открытым выходом. К таким объектам относятся сиденья водителей и пассажиров в транспортных средствах. В этом случае со стенда нельзя подать на сиденья постоянную силу, которая необходима для приведения их в заданное внутреннее состояние, в течение промежутка времени, необходимого для их идентификации. Задача изобретения - расширение класса идентифицируемых НДО за счет того, что псевдослучайные воздействия подаются на объект при одном и том же его внутреннем состоянии, соответствующем состоянию покоя объекта. Поставленная задача решается тем, что в способе идентификации нелинейного динамического объекта, при котором на объект идентификации подают случайный сигнали регистрируют его отклик , определяют дискретные значения сигналаи отклика, причем, согласно изобретению, разбивают входной сигналнадиапазонов и вычисляют их ширину по полученным максимально возможным положительным и отрицательным значениям входного сигнала , определяют размерностьбыстрого преобразования Фурье и подают на объект идентификации псевдослучайный сигнал , где 1, 2 , регистрируют отклик у объекта идентификации на участке(21),псевдослучайный входной сигнална том же участке и среднеквадратичное отклонениеупомянутого псевдослучайного входного сигнала, по которым определяютчастотных характеристик объекта идентификации, скорректированных на нулевой частоте,по которым путем обратного быстрого преобразования Фурье определяютимпульсных характеристик объекта идентификации, формируют признаки выбора модели объекта идентификации, соответствующей заданному эксплуатационному сигналу , воздействующему на объект идентификации, и среднеквадратичному отклонениюупомянутого эксплуатационного сигнала, путем определения среднеквадратичных отклонений 1, 3 13749 1 2010.10.30 2, ,псевдослучайного входного сигнала , по упомянутым импульсным характеристикам формируютмоделей объекта идентификации в виде уравнений где у - отклик -й модели( ) - отсчеты -й импульсной характеристики объекта идентификации,определяют интервал в упомянутых моделях, которому соответствует , и осуществляют формирование модели объекта идентификации, причем корректировку упомянутыхчастотных характеристик объекта идентификации на нулевой частоте осуществляют путем принятия коэффициента 00 при быстром преобразовании Фурье отклика уг и коэффициента 00 при быстром преобразовании Фурье псевдослучайного входного сигнала. На фиг. 1 представлена схема устройства для реализации способа. На фиг. 2-4 показаны три псевдослучайных воздействияпри 3. Устройство содержит НДО 1 с датчиком 2 входного сигнала и датчиком 3 его отклика,безынерционную нелинейную пружину 4 и твердое тело 5 массой , стенд 6 для задания входных сигналов, блок 7 аналого-цифрового преобразования (АЦП), электронную вычислительную машину (ЭВМ) 8. Выход ЭВМ 8 соединен с управляющим входом стенда 6, с которым жестко соединен датчик 2 входного сигнала, выход которого электрически соединен с первым входом блока 7 АЦП, другой вход которого соединен с выходом датчика 3 отклика НДО 1. Выход блока 7 АЦП через интерфейс соединен с ЭВМ 8. Первый конец пружины 4 жестко связан с датчиком 2 входного сигнала, а другой - с датчиком 3 отклика НДО 1. Работа устройства происходит следующим образом. В ЭВМ 8 заносятся исходные данные для идентификации НДО 1, т.е. количество диапазоновразбиения его входного воздействия, а также высшая частота в, до которой будет производиться идентификация. На объект 1 идентификации с помощью стенда 6 подают случайный сигналс достаточно большой дисперсией, такой, чтобы отклик объектадостигал как можно больших значений. Входной случайный сигналрегистрируется с помощью датчика 2,а отклик- с помощью датчика 3. Из сигналов от датчиков 2 и 3 с помощью блока 7 АЦП получают дискретные значения сигналаи отклика , которые заносятся в ЭВМ 8. В ЭВМ 8 определяются максимально возможные положительныеи отрицательныезначения входного воздействия НДО 1, а по ним находят ширинувходных диапазонов по соотношению Для определения размерности дискретного преобразования Фурье (ДПФ), используемого при идентификации объекта, сначала определяют длинуимпульсной характеристики (ИХ) НДО 1. Для этого на вход НДО 1 с помощью стенда 6 подают испытательный сигнал Хи в виде короткого импульса. Время от момента окончания импульса до момента полного затухания отклика и принимают за длинуИХ. 13749 1 2010.10.30 Затем по заданной высшей частоте в, до которой будет производиться идентификация, вычисляют значение интервала дискретизациидля дискретной модели НДО 1 по формуле 1(4) 4 в После этого вычисляют размерностьбыстрого преобразования Фурье (БПФ) для идентификации НДО 1 2 и округляют полученное значениедо большего числа из ряда чисел 2 (2, 3, ). Генерируют псевдослучайный процесс 14/ 22 где- случайная фаза, равномерно распределенная в диапазоне от 0 до 2,0(21). Здесь 1 - периодический процесс с периодом, равным . В соответствии с формулой (6) генерируется два периода этого процесса. Первый период, равный удвоенной длине ИХ, нерабочий (переходной процесс). Второй период используется для идентификации. Затем подают на объект с помощью стенда 6 воздействие 1, регистрируют отклик 1 НДО 1 на участке(21), входное воздействие на том же участке, а также среднеквадратичное отклонение 1 входного воздействия 1. Вычисляют частотную характеристику 1(к) НДО 1 точечное БПФ отклика НДО 1 1 (к )(7)точечное БПФ входного сигнала При этом в БПФ отклика принимаем коэффициент 00, а в БПФ входного воздействия принимаем коэффициент 00, например равным единице. Это делается для того,чтобы отсчет, соответствующий нулевой частоте, в частотной характеристике НДО 1 был равен нулю. Последнее приводит к тому, что модель будет реагировать только на переменную составляющую входного воздействия. Вычисляют ИХ 1 НДО 1(8) ИХ 1 ОБПФ от 1(к),где ОБПФ - обратное быстрое преобразование Фурье. Подают на НДО 1 псевдослучайное воздействие со среднеквадратичным отклонением 24/ 22 Аналогично вычисляют ИХ 2. Подают на НДО 1 псевдослучайное воздействие со среднеквадратичным отклонением 34/ 22 Аналогично вычисляют ИХ 3 и т.д. вплоть до ИХ. Реализуютмоделей НДО 1 в следующем виде Определяют, в какой интервал в моделях объекта попадает , и формируют модель нелинейного объекта. На этом процесс идентификации НДО 1 заканчивается. Пример реализации способа. Компьютерный НДО 1, состоящий из последовательно соединенных первого линейного динамического объекта (ЛДО 1), безынерционной нелинейности (БН) и второго линейного динамического объекта (ЛДО 2). При этом ЛДО 1 описывается следующим разностным уравнением 8 где 01 12 23 34 45 54 63 72 81. Безынерционная нелинейность выражается следующей функцией,а ЛДО 2 описывается следующим разностным уравнением где 01 12 2 3 3 2,5 41. Пусть и 0,08 и-0,08. Зададим количество диапазонов 20. В компьютерном объекте интервал дискретизации(формула 4) обычно берут равным единице, и поэтому для компьютерного объекта задавать в для определенияне надо. Вычисляем ширинувходных диапазонов по формуле (3). Она оказалась равной 0,008. Как указывалось выше, в компьютерном объекте интервал дискретизацииобычно берут равным единице, и тогда длина импульсной характеристики будет измеряться количеством ее отсчетов. При этом вместо резкого перепада входного сигнала проще использовать одиночный импульс, отклик на который даст длину ИХ. Для нашего объекта длина ИХ получилась равной 13. Тогда для идентификации НДО в соответствии с формулой (5) минимальную размерность БПФ для идентификации НДО можно взять равной 32. Нами для этой цели использовалось 128 точечное БПФ. Проведя действия в соответствии с формулами (6)-(10), получаем 20 импульсных характеристик НДО из 128 временных отсчетов, первые 20 из которых приведены ниже. ИХ 1-0,8678 2,1324 8,1236 16,6018 26,0716 33,5465 37,0352 33,5446 27,0689 17,5989 9,1246 2,6435 -0,8488 -1,8514 -1,8582 -1,8619 -1,8610 -1,8571 -1,8538 13749 1 2010.10.30 Характерным в этих ИХ является то, что их среднее значение всех 128 отсчетов равно нулю. Это обусловлено тем, что отсчет, соответствующий нулевой частоте, в частотной характеристике НДО 1 был специально сделан равным нулю. По импульсным характеристикам ИХ 1 ИХ 20, используя формулы (11), строим 20 моделей НДО. Подаем на вход НДО и его модели один и тот же случайный процесс большой амплитуды, но в пределах 20 диапазонов . Для этого генерировалось 20 эксплуатационных случайных воздействийпо формулам 2/2 где С - масштабирующий множитель,- длина эксплуатационного воздействия,2, 4,8, ,- параметр, регулирующий количество гармоник в эксплуатационном воздействии, а остальные обозначения те же, что и в формуле (6). Нами значение С было взято равным 0,5 значение 128, а значение 2. В соответствии со значениями среднеквадратичных отклоненийэксплуатационных случайных воздействийи признакам модели в формулах (11) формируют модель НДО. В нашем случае были сформированы последовательно следующие модели 9 ( ) 9 ( ) 10 ( ) 10 ( ) 11 ( ). Из сформированных моделей видно, что в большинстве случаев одна и та же модель использовалась для пары входных воздействий начиная с пары 1 ( ) -2 ( ) . Это объясняется тем, чтовходных эксплуатационных воздействийбыли в два раза меньшесоответствующих идентификационных воздействий . Сравниваем отклики НДО и модели. Среднеквадратичные погрешности идентификации для различных диапазоновв процентах были следующими 10,23 20,17 30,96 41,13 52,08 62,41 72,21 83,61 93,57 105,04 114,32 127,99 139,78 1411,86 1514,32 1612,99 1714,47 1819,61 198,62 2014,04. Таким образом, предложенный способ идентификации позволяет расширить класс идентифицируемых НДО за счет того, что псевдослучайные воздействия подаются при одном и том же внутреннем состоянии объекта, соответствующем состоянию покоя объекта. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G06F 17/14, G05B 17/00
Метки: динамического, идентификации, нелинейного, способ, объекта
Код ссылки
<a href="https://by.patents.su/8-13749-sposob-identifikacii-nelinejjnogo-dinamicheskogo-obekta.html" rel="bookmark" title="База патентов Беларуси">Способ идентификации нелинейного динамического объекта</a>
Способ идентификации нелинейного динамического объекта
Номер патента: 10526
Опубликовано: 30.04.2008
Авторы: Петько Валерий Иванович, Куконин Владимир Егорович, Выставная Елена Ивановна
МПК: G06G 7/00
Метки: нелинейного, идентификации, динамического, способ, объекта
Текст:
..., ) отклика НДО 1(1) . г г Для определения размерности дискретного преобразования Фурье (ДПФ), используемого при идентификации объекта, сначала определяют длину импульсной характеристики(ИХ) НДО 1. Для этого на вход НДО 1 с помощью стенда 7 подают небольшой испытательный сигнал Хи с постоянными мгновенными значениями и после установления отклика и резко убирают входной сигнал. Время от момента снятия сигнала до момента полного затухания...
Способ идентификации линейного динамического объекта

Номер патента: 10600
Опубликовано: 30.04.2008
Авторы: Петько Валерий Иванович, Куконин Владимир Егорович, Выставная Елена Ивановна
МПК: G06F 17/10, G05B 17/02, G06F 17/15...
Метки: объекта, идентификации, динамического, способ, линейного
Текст:
...входногои выходногосигналов линейного объекта в виде не менее(21) дискретных отсчетов и определяют коэффициенты модели, решая систему где- порядковый номер временного отсчета ( равняется от 0 до 2),- коэффициенты модели линейного динамического объекта ( равняется от 0 до ),причем разностное уравнение имеет вид Вследствие того, что модель (3) имеет нерекурсивную структуру, она оказывается устойчивой. В соответствии с предлагаемым способом...
Устройство для определения степени нелинейности нелинейного динамического объекта
Номер патента: U 4939
Опубликовано: 30.12.2008
Авторы: Выставная Елена Ивановна, Куконин Владимир Егорович, Петько Валерий Иванович
МПК: G06G 7/00
Метки: объекта, устройство, нелинейного, нелинейности, определения, степени, динамического
Текст:
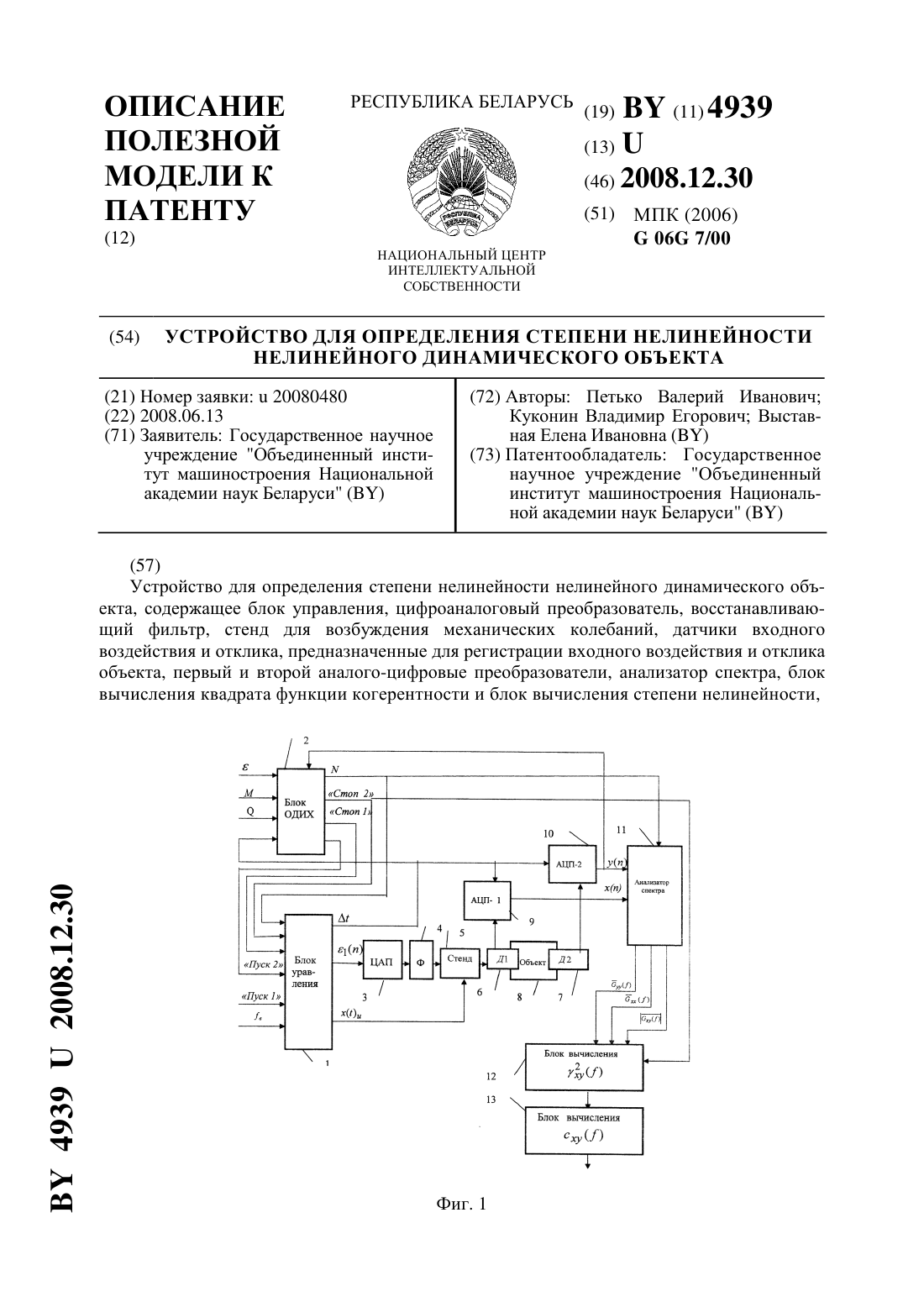
...для регистрации входного воздействия и отклика объекта 8, первый 9 и второй 10 аналого-цифровые преобразователи, анализатор 11 спектра, блок 12 вычисления квадрата функции когерентности и блок 13 вычисления степени нелинейности, причем первый выход блока 1 управления соединен со вторым входом стенда 5, второй выход блока 1 управления соединен со входом цифроаналогового преобразователя 3, выход которого соединен со входом...
Система для регулирования выходной координаты динамического объекта
Номер патента: 8824
Опубликовано: 30.12.2006
Авторы: Розсудовский Сергей Викторович, Мацкевич Артур Николаевич
МПК: G05B 17/02, G05B 11/01
Метки: система, динамического, координаты, регулирования, выходной, объекта
Текст:
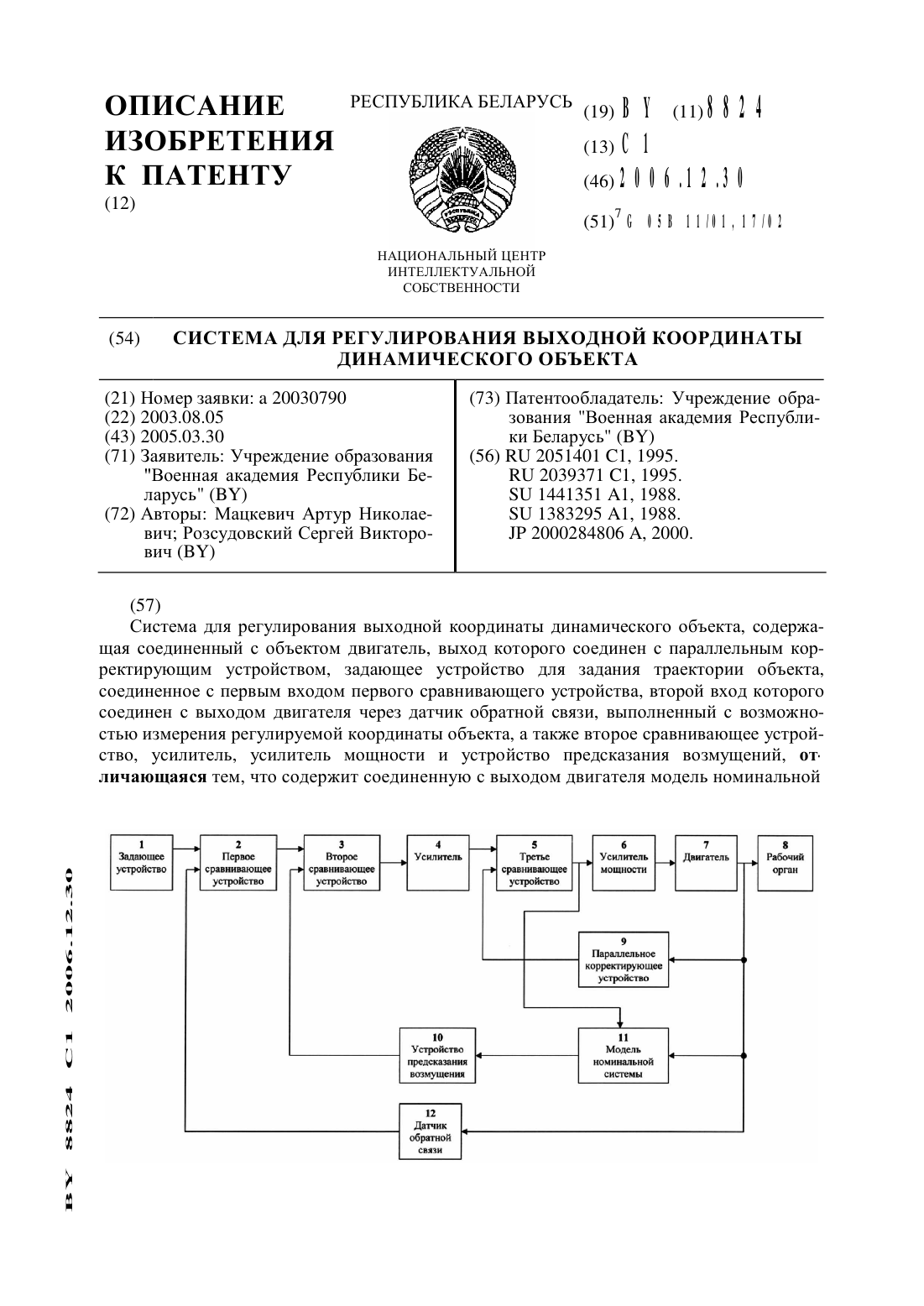
...сравнивающего устройства соединены с первым сравнивающим устройством, устройством предсказания возмущений и усилителем соответственно. При этом из устройства-прототипа исключаются генератор случайных чисел,стохастический регулятор, схема управления и ключ.На фигуре представлена функциональная схема системы для регулирования выходной координаты динамического объекта.Функциональная схема системы для регулирования выходной координаты...
Способ измерения дальности до объекта
Номер патента: 5991
Опубликовано: 30.03.2004
Авторы: Михайлов Анатолий Борисович, Савченко Владимир Дмитриевич
МПК: G01C 3/08
Метки: дальности, измерения, объекта, способ
Текст:
...электрических цепей и т.д. не представляется возможным. В результате постоянной подачи питающего напряжения на ФПУ снижается такой показатель надежности дальномерной системы, как наработка на отказ, поскольку этот параметр самого ФПУ может быть невысоким. Кроме того, при совместной работе множества дальномерных систем, например в боевой обстановке, происходит нежелательное влияние их друг на друга через постоянно запитанные ФПУ,...
Предыдущий патент: Устройство для вычисления полиномиальных симметрических булевых функций
Следующий патент: Смесь для получения каталитического материала на основе кобальтита
Случайный патент: Плоский носитель информации