Устройство для определения степени нелинейности нелинейного динамического объекта
Номер патента: U 4939
Опубликовано: 30.12.2008
Авторы: Петько Валерий Иванович, Куконин Владимир Егорович, Выставная Елена Ивановна
Текст
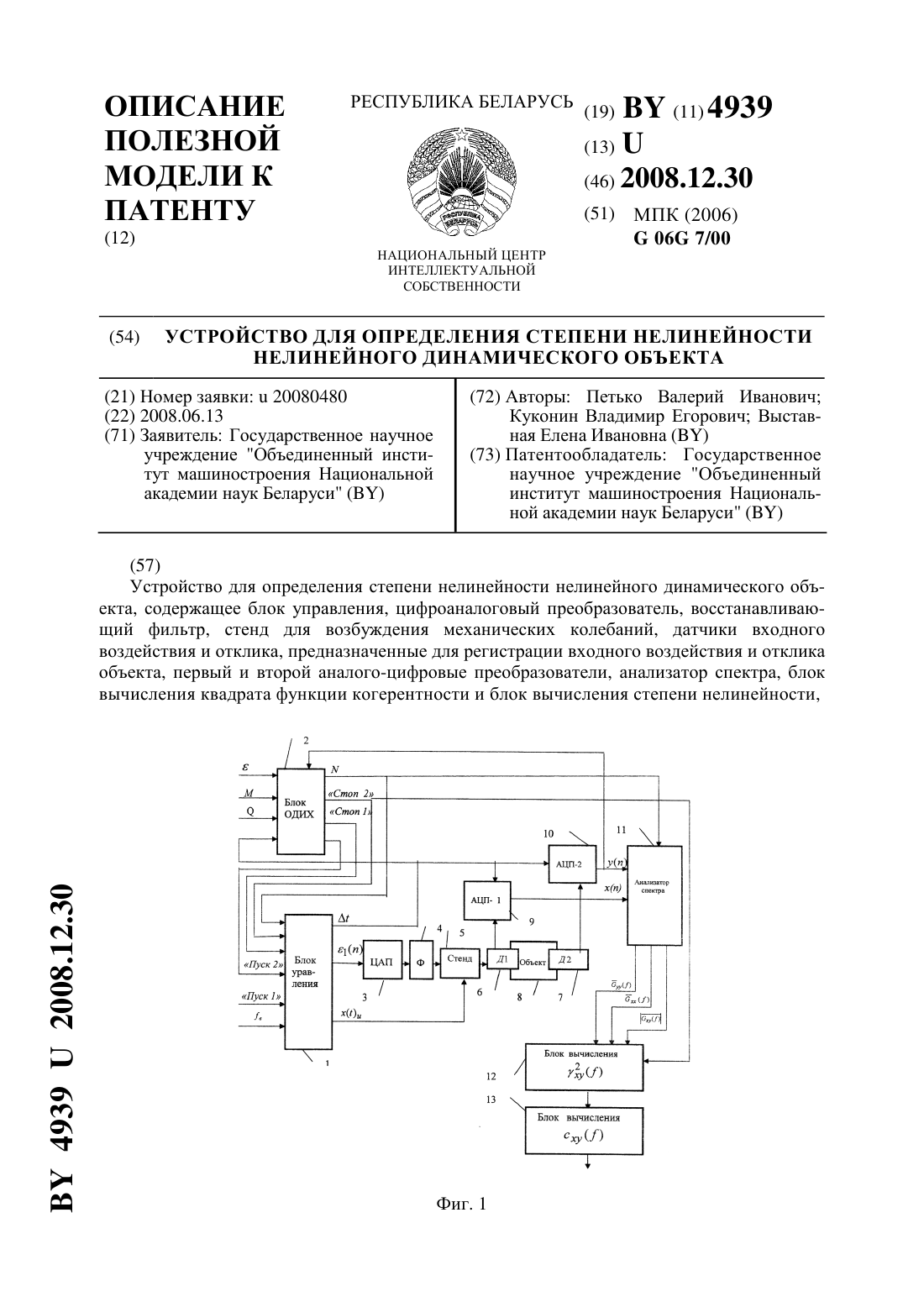
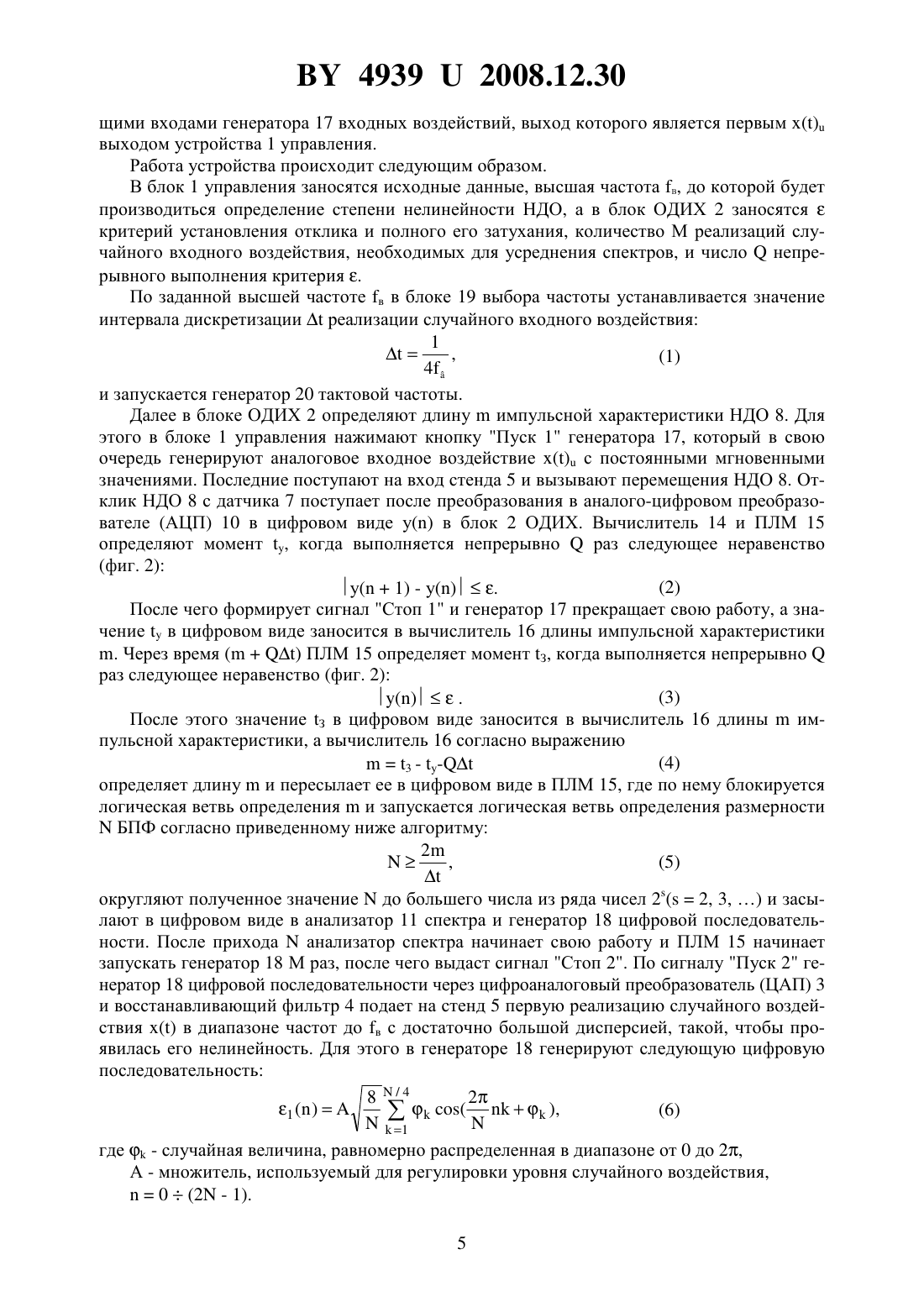
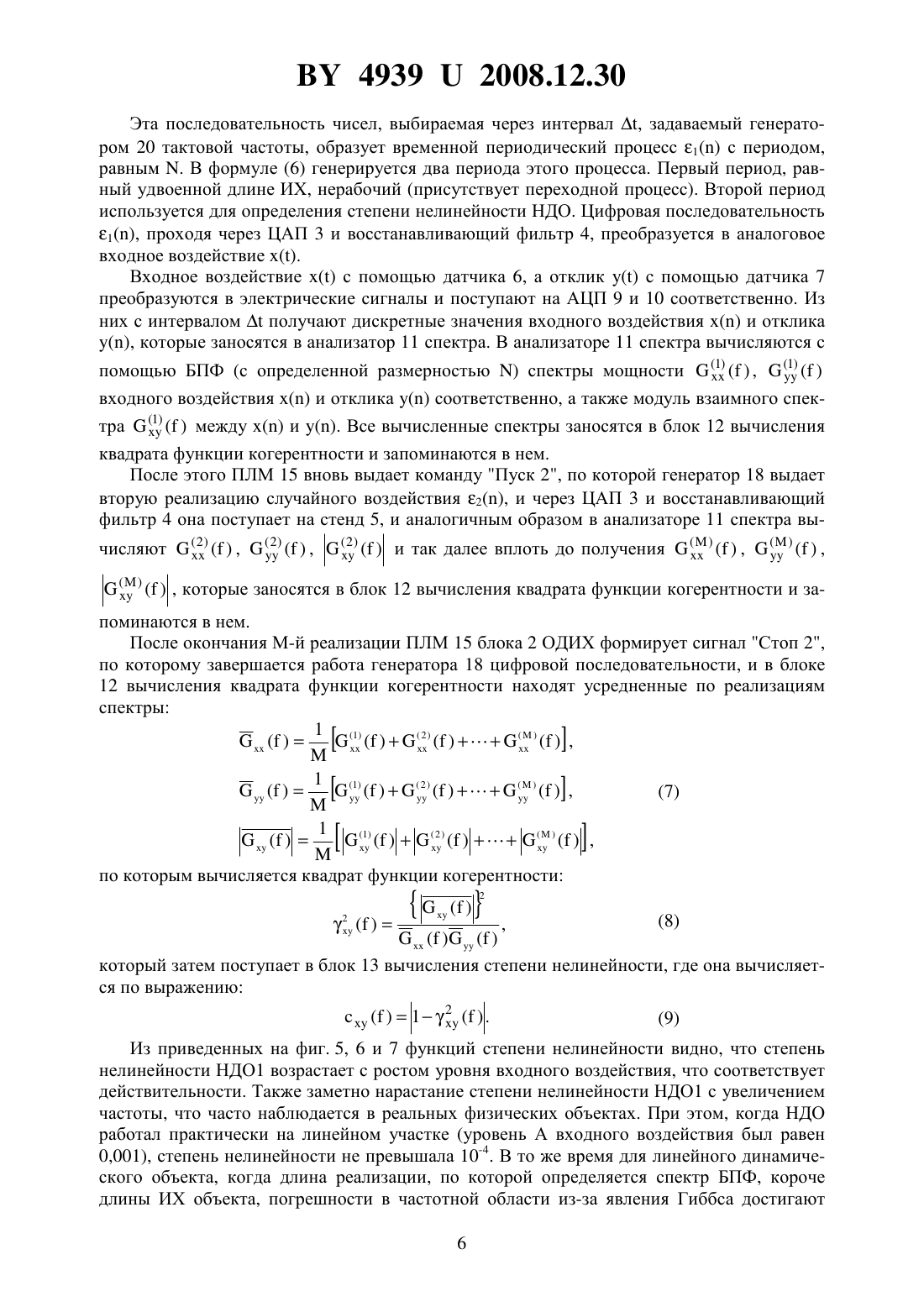
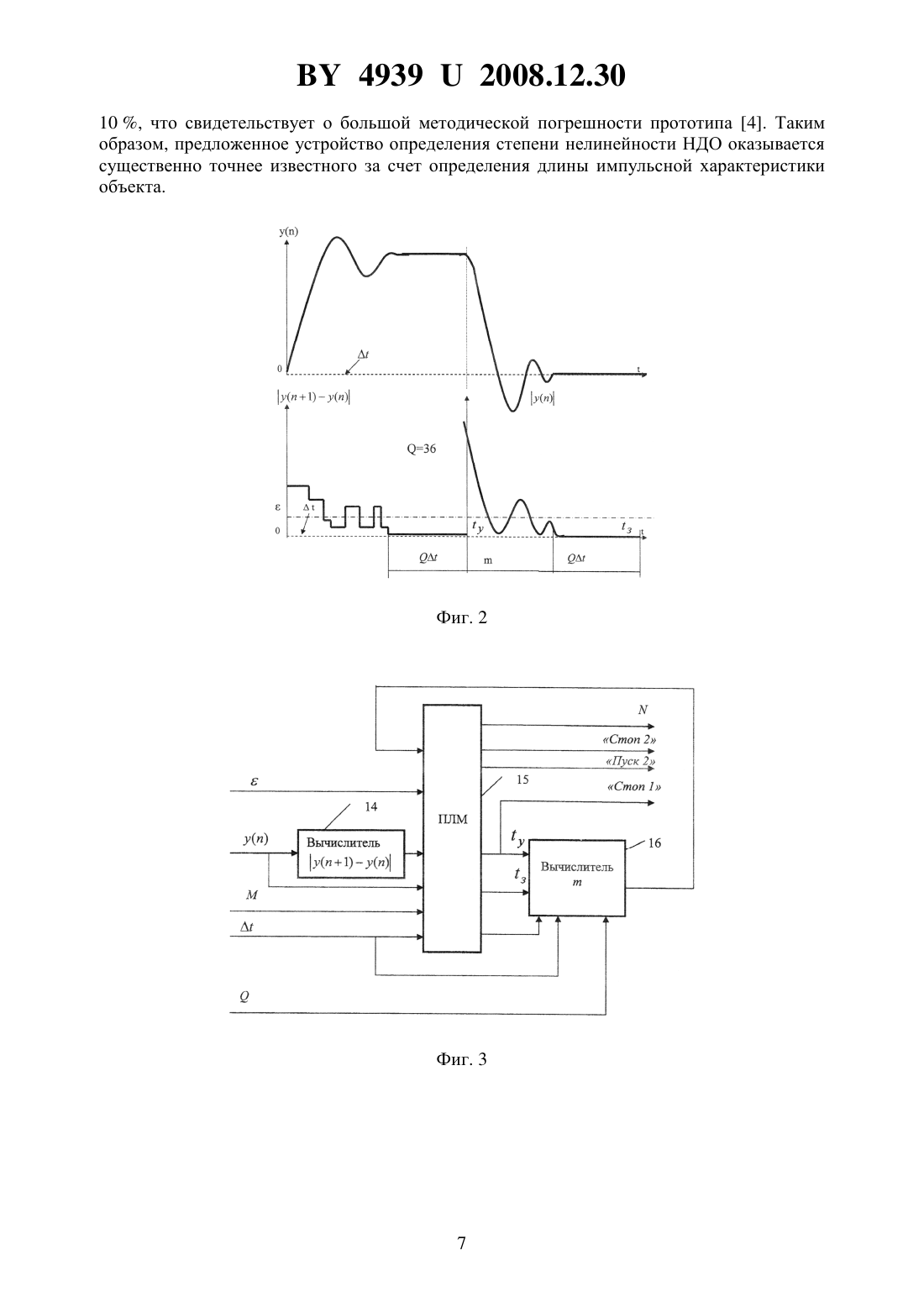
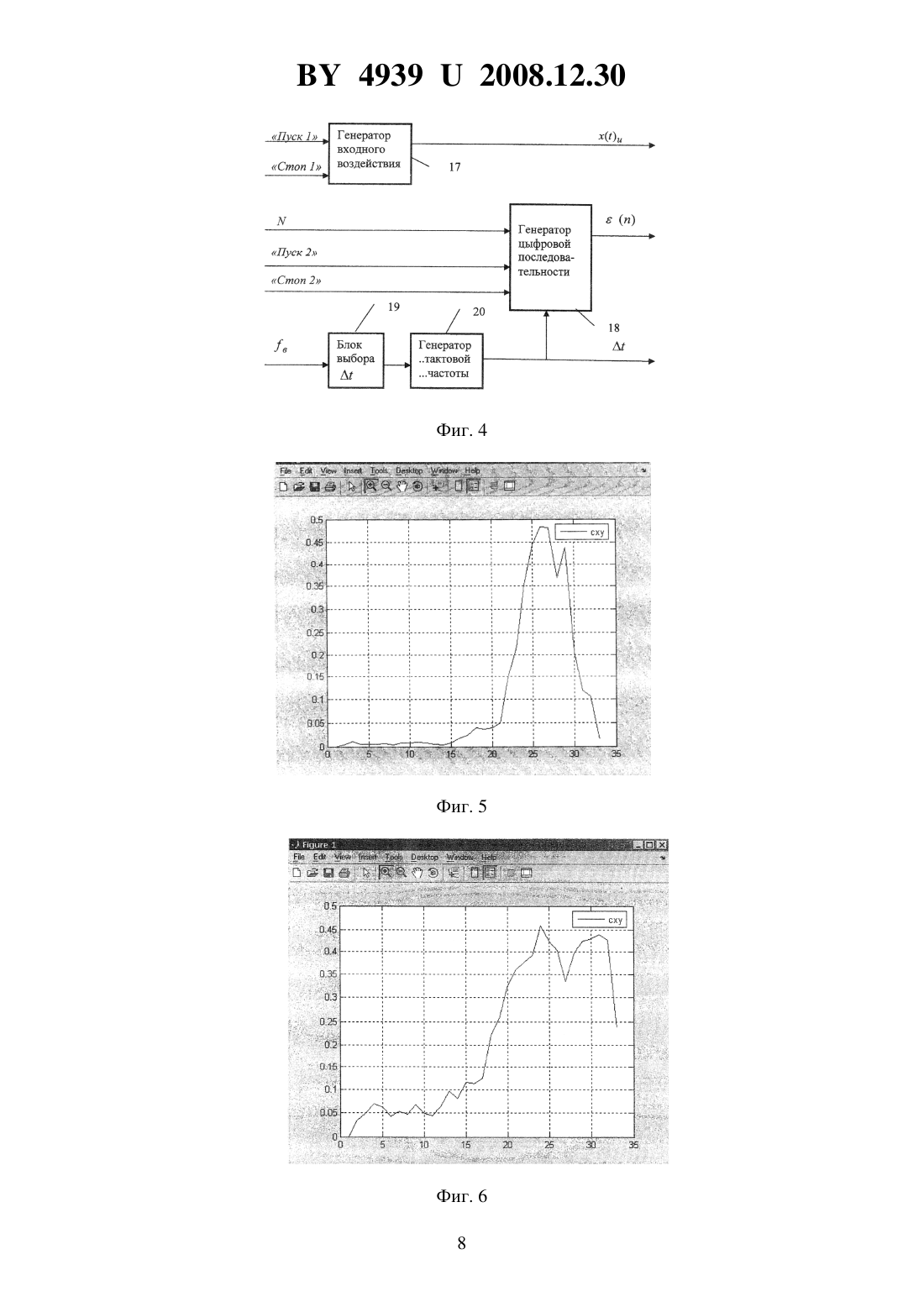
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СТЕПЕНИ НЕЛИНЕЙНОСТИ НЕЛИНЕЙНОГО ДИНАМИЧЕСКОГО ОБЪЕКТА(71) Заявитель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(72) Авторы Петько Валерий Иванович Куконин Владимир Егорович Выставная Елена Ивановна(73) Патентообладатель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(57) Устройство для определения степени нелинейности нелинейного динамического объекта, содержащее блок управления, цифроаналоговый преобразователь, восстанавливающий фильтр, стенд для возбуждения механических колебаний, датчики входного воздействия и отклика, предназначенные для регистрации входного воздействия и отклика объекта, первый и второй аналого-цифровые преобразователи, анализатор спектра, блок вычисления квадрата функции когерентности и блок вычисления степени нелинейности, Фиг. 1 49392008.12.30 причем первый выход блока управления соединен со вторым входом стенда, второй выход блока управления соединен со входом цифроаналогового преобразователя, выход которого соединен со входом восстанавливающего фильтра, выход которого соединен с первым входом стенда, выход которого соединен с датчиком входного воздействия, выходы датчиков входного воздействия и отклика соединены с информационными входами первого и второго аналого-цифровых преобразователей соответственно, первый х и второй у выходы которых соединены с соответствующими входами анализатора спектра, первый, второйи третийвыходы анализатора спектра соединены с соответствующими входами блока вычисления квадрата функции когерентности, выход которого соединен со входом блока вычисления степени нелинейности, третий выходблока управления соединен с управляющими входами первого и второго аналого-цифровых преобразователей, отличающееся тем, что введен блок определения длины импульсной характеристики, первый Стоп 1, второй , третий Стоп 2 и четвертый Пуск 2, выходы которого соединены со вторым, первым, четвертым и шестым входами блока управления соответственно, второйи третий Стоп 2 выходы блока определения длины импульсной характеристики соединены с третьим входом анализатора спектра и управляющим входом блока вычисления квадрата функции когерентности соответственно, первый вход блока определения длины импульсной характеристики соединен с выходом у второго аналого-цифрового преобразователя, четвертый вход блока определения длины импульсной характеристики соединен с третьим выходомблока управления.(56) 1. Райбман Н.С. Что такое идентификация. - М. Наука, 1970. - С. 94-99. 2. Бендат Дж., Пирсол А. Применение корреляционного и спектрального анализа. - М. Мир, 1983. - С. 94. 3. Введение в цифровую фильтрацию / Под ред. Р. Богнера и А. Константинидиса. М. Мир, 1976. - С. 96. 4. Введение в цифровую фильтрацию / Под ред. Р. Богнера и А. Константинидиса. М. Мир, 1976. - С. 158. Полезная модель относится к технической кибернетике и может быть использована при определении степени нелинейности механических, гидравлических, энергетических и тепловых объектов в эксплуатационных условиях. Известно устройство для определения степени нелинейности нелинейных динамических объектов (НДО), содержащее вычислители нормированных взаимной дисперсионной и взаимной корреляционной функций, а также вычислитель степени нелинейности 1. В этом устройстве степень нелинейности получается как функция временного сдвига. Это не позволяет оценить степень нелинейности НДО на гармониках различных частот,что в свою очередь ограничивает его использование в указанных выше областях. Наиболее близким к предлагаемому устройству является устройство для определения степени нелинейности нелинейного динамического объекта 2, содержащее блок управления, цифроаналоговый преобразователь, восстанавливающий фильтр, стенд для возбуждения механических колебаний, датчики входного воздействия и отклика, предназначенные для регистрации входного воздействия и отклика объекта, первый и второй аналого-цифровые преобразователи, анализатор спектра, блок вычисления квадрата функции когерентности и блок вычисления степени нелинейности, причем первый выход блока управления соединен со вторым входом стенда, второй выход блока управления соединен со входом цифроаналогового преобразователя, выход которого соединен со входом восстанавливающего фильтра, выход которого соединен с первым входом стенда, выход которого соединен с датчиком входного воздействия, выходы датчиков входного 2 49392008.12.30 воздействия и отклика соединены с информационными входами первого и второго аналого-цифровых преобразователей соответственно, первыйи второй у выходы которых соединены с соответствующими входами анализатора спектра, первый , второй и третийвыходы анализатора спектра соединены с соответствующими входами блока вычисления квадрата функции когерентности, выход которого соединен с входом блока вычисления степени нелинейности, третий выходблока управления соединен с управляющими входами первого и второго аналого-цифровых преобразователей. Недостатком устройства является его невысокая точность. Последнее обусловлено тем, что в нем длина реализации, по которой определяется спектр, например, с помощью быстрого преобразования Фурье (БПФ), не согласована с динамическими свойствами объекта. Так, если для низкочастотного объекта, имеющего, как известно, длинную импульсную характеристику (ИХ), взять для проведения БПФ реализацию короче ИХ, то такое усечение ИХ приведет к искажению в частотной области из-за явления Гиббса 3 и, в конечном итоге, к большой погрешности вычисления степени нелинейности объекта. Задача полезной модели - повышение точности определения степени нелинейности НДО путем определения длины импульсной характеристики (ОДИХ) объекта. Поставленная задача решается тем, что в устройство для определения степени нелинейности, содержащее блок управления, цифроаналоговый преобразователь, восстанавливающий фильтр, стенд для возбуждения механических колебаний, датчики входного воздействия и отклика, предназначенные для регистрации входного воздействия и отклика объекта, первый и второй аналого-цифровые преобразователи, анализатор спектра, блок вычисления квадрата функции когерентности и блок вычисления степени нелинейности,причем первый выход блока управления соединен со вторым входом стенда, второй выход блока управления соединен со входом цифроаналогового преобразователя, выход которого соединен со входом восстанавливающего фильтра, выход которого соединен с первым входом стенда, выход которого соединен с датчиком входного воздействия, выходы датчиков входного воздействия и отклика соединены с информационными входами первого и второго аналого-цифровых преобразователей соответственно, первыйи второй у выходы которых соединены с соответствующими входами анализатора спектра, первый, второйи третийвыходы анализатора спектра соединены с соответствующими входами блока вычисления квадрата функции когерентности, выход которого соединен со входом блока вычисления степени нелинейности, третий выходблока управления соединен с управляющими входами первого и второго аналого-цифровых преобразователей, согласно изобретению, введен блок определения длины импульсной характеристики, первый Стоп 1, второй , третий Стоп 2 и четвертый Пуск 2, выходы которого соединены со вторым, первым, четвертым и шестым входами блока управления соответственно, второйи третий Стоп 2 выходы блока определения длины импульсной характеристики соединены с третьим входом анализатора спектра и управляющим входом блока вычисления квадрата функции когерентности соответственно, первый вход блока определения длины импульсной характеристики соединен с выходом у второго аналого-цифрового преобразователя, четвертый вход блока определения длины импульсной характеристики соединен с третьим выходомблока управления. На фиг. 1 представлена структурная схема устройства. На фиг. 2 показан процесс определения длиныимпульсной характеристики (ИХ) НДО. На фиг. 3 представлена структурная схема блока определения длиныимпульсной характеристики (ОДИХ). На фиг. 4 представлена структурная схема блока управления 1 устройства. На фиг. 5, 6 и 7 представлена полученная функция степени нелинейности одного из типичных НДО (Винера-Гаммерштейна) при различных уровнях входного воздействия при среднеквадратических значениях 0,01 0,05 и 0,1 соответственно. 3 49392008.12.30 Устройство содержит (фиг. 1) блок 1 управления, блок 2 определения длины импульсной характеристики (ОДИХ), цифроаналоговый преобразователь 3, восстанавливающий фильтр 4, стенд 5 для возбуждения механических колебаний, датчики 6, 7 входного воздействия и отклика, предназначенные для регистрации входного воздействия и отклика объекта 8, первый 9 и второй 10 аналого-цифровые преобразователи, анализатор 11 спектра, блок 12 вычисления квадрата функции когерентности и блок 13 вычисления степени нелинейности, причем первый выход блока 1 управления соединен со вторым входом стенда 5, второй выход блока 1 управления соединен со входом цифроаналогового преобразователя 3, выход которого соединен со входом восстанавливающего фильтра 4, выход которого соединен с первым входом стенда 5, выход которого соединен с датчиком 6 входного воздействия, выходы датчиков 6, 7 входного воздействия и отклика соединены с информационными входами первого 9 и второго 10 аналого-цифровых преобразователей соответственно, первыйи второй у выходы которых соединены с соответствующими входами анализатора 11 спектра, первый , второйи третийвыходы анализатора 11 спектра соединены с соответствующими входами блока 12 вычисления квадрата функции когерентности, выход которого соединен со входом блока 13 вычисления степени нелинейности, третий выходблока 1 управления соединен с управляющими входами первого 9 и второго 10 аналого-цифровых преобразователей,первый Стоп 1, второй , третий Стоп 2 и четвертый Пуск 2 выходы блока 2 определения длины импульсной характеристики соединены со вторым, первым, четвертым и шестым входами блока 1 управления соответственно, второйи третий Стоп 2 выходы блока 2 определения длины импульсной характеристики соединены с третьим входом анализатора 11 спектра и управляющим входом блока 12 вычисления квадрата функции когерентности соответственно, первый вход блока 2 определения длины импульсной характеристики соединен с выходом у второго аналого-цифрового преобразователя 10,четвертый вход блока 2 определения длины импульсной характеристики соединен с третьим выходомблока 1 управления. Блок 2 определения длины импульсной характеристики (ОДИХ) (фиг. 3) содержит вычислитель 14 модуля приращения (1) - у, программируемую логическую матрицу (ПЛМ) 15 и вычислитель 16 длиныимпульсной характеристики, причем первый вход у блока 2 ОДИХ соединен с третьим входом ПЛМ 15 и входом вычислителя 14 модуля приращения (1) - , выход которого является первым входом ПЛМ 15, вторым, четвертым и шестым входами которой являются входы ввода значений ,и М соответственно, причем входподсоединен к управляющему четвертому входу вычислителя 16 длиныимпульсной характеристики, на информационные первый, второй и третий входы которого подключены первый, второй и третий (цифровой код ) выходы ПЛМ 15 соответственно, вход введения параметраявляется пятым информационным входом вычислителя 16 длиныимпульсной характеристики, первый информационный вход у которого является выходом Стоп 1 блока 2 ОДИХ, четвертый, пятый и шестой выходы ПЛМ 15 является вторым , третьим Стоп 2 и четвертым Пуск 2 выходами блока 2 ОДИХ, выход вычислителя 16 длиныимпульсной характеристики подключен к пятому входу ПЛМ 15. Блок 1 управления (фиг. 4) содержит генератор 17 входного воздействия , генератор 18 цифровой последовательности , блок 19 выбораи генератор 20 тактовой частоты, причем вход для введения параметра в является входом блока 19 выбора , выход которого соединен со входом генератора 20 тактовой частоты, выход которогоявляется третьим выходом блока управления 1 и соединен с третьим входом генератора 18 соответственно, выход которого является вторым 1 выходом блока 1 управления, входы которого Пуск 2 и Стоп 2 являются вторым и четвертым входами генератора 18 соответственно, а входы блока 1 управления Пуск 1 и Стоп 1 являются соответствую 4 49392008.12.30 щими входами генератора 17 входных воздействий, выход которого является первымвыходом устройства 1 управления. Работа устройства происходит следующим образом. В блок 1 управления заносятся исходные данные, высшая частота В, до которой будет производиться определение степени нелинейности НДО, а в блок ОДИХ 2 заносятсякритерий установления отклика и полного его затухания, количество М реализаций случайного входного воздействия, необходимых для усреднения спектров, и числонепрерывного выполнения критерия . По заданной высшей частоте в в блоке 19 выбора частоты устанавливается значение интервала дискретизацииреализации случайного входного воздействия 1,(1) 4 и запускается генератор 20 тактовой частоты. Далее в блоке ОДИХ 2 определяют длинуимпульсной характеристики НДО 8. Для этого в блоке 1 управления нажимают кнопку Пуск 1 генератора 17, который в свою очередь генерируют аналоговое входное воздействиес постоянными мгновенными значениями. Последние поступают на вход стенда 5 и вызывают перемещения НДО 8. Отклик НДО 8 с датчика 7 поступает после преобразования в аналого-цифровом преобразователе (АЦП) 10 в цифровом виде у в блок 2 ОДИХ. Вычислитель 14 и ПЛМ 15 определяют момент , когда выполняется непрерывнораз следующее неравенство(2) у(1) - у. После чего формирует сигнал Стоп 1 и генератор 17 прекращает свою работу, а значениев цифровом виде заносится в вычислитель 16 длины импульсной характеристики. Через время ПЛМ 15 определяет момент З, когда выполняется непрерывнораз следующее неравенство (фиг. 2). После этого значение З в цифровом виде заносится в вычислитель 16 длиныимпульсной характеристики, а вычислитель 16 согласно выражению(4)3 - определяет длинуи пересылает ее в цифровом виде в ПЛМ 15, где по нему блокируется логическая ветвь определенияи запускается логическая ветвь определения размерностиБПФ согласно приведенному ниже алгоритму 2 округляют полученное значениедо большего числа из ряда чисел 2(2, 3, ) и засылают в цифровом виде в анализатор 11 спектра и генератор 18 цифровой последовательности. После приходаанализатор спектра начинает свою работу и ПЛМ 15 начинает запускать генератор 18 М раз, после чего выдаст сигнал Стоп 2. По сигналу Пуск 2 генератор 18 цифровой последовательности через цифроаналоговый преобразователь (ЦАП) 3 и восстанавливающий фильтр 4 подает на стенд 5 первую реализацию случайного воздействияв диапазоне частот до в с достаточно большой дисперсией, такой, чтобы проявилась его нелинейность. Для этого в генераторе 18 генерируют следующую цифровую последовательность 8 /4 2 1 ( )(6),1 где- случайная величина, равномерно распределенная в диапазоне от 0 до 2,А - множитель, используемый для регулировки уровня случайного воздействия,0(2 - 1). 5 49392008.12.30 Эта последовательность чисел, выбираемая через интервал , задаваемый генератором 20 тактовой частоты, образует временной периодический процесс 1 с периодом,равным . В формуле (6) генерируется два периода этого процесса. Первый период, равный удвоенной длине ИХ, нерабочий (присутствует переходной процесс). Второй период используется для определения степени нелинейности НДО. Цифровая последовательность 1, проходя через ЦАП 3 и восстанавливающий фильтр 4, преобразуется в аналоговое входное воздействие . Входное воздействиес помощью датчика 6, а откликс помощью датчика 7 преобразуются в электрические сигналы и поступают на АЦП 9 и 10 соответственно. Из них с интерваломполучают дискретные значения входного воздействияи отклика входного воздействияи откликасоответственно, а также модуль взаимного спектра(1) ( ) междуи . Все вычисленные спектры заносятся в блок 12 вычисления квадрата функции когерентности и запоминаются в нем. После этого ПЛМ 15 вновь выдает команду Пуск 2, по которой генератор 18 выдает вторую реализацию случайного воздействия 2, и через ЦАП 3 и восстанавливающий фильтр 4 она поступает на стенд 5, и аналогичным образом в анализаторе 11 спектра вычисляют( 2) ( ) ,( 2) ( ) ,( 2) ( ) и так далее вплоть до получения ( ) , ( ) , ( ) , которые заносятся в блок 12 вычисления квадрата функции когерентности и за поминаются в нем. После окончания М-й реализации ПЛМ 15 блока 2 ОДИХ формирует сигнал Стоп 2,по которому завершается работа генератора 18 цифровой последовательности, и в блоке 12 вычисления квадрата функции когерентности находят усредненные по реализациям спектры 1 (1) 2( )( )( )( ) ( ) , по которым вычисляется квадрат функции когерентности,( )( ) который затем поступает в блок 13 вычисления степени нелинейности, где она вычисляется по выражению Из приведенных на фиг. 5, 6 и 7 функций степени нелинейности видно, что степень нелинейности НДО 1 возрастает с ростом уровня входного воздействия, что соответствует действительности. Также заметно нарастание степени нелинейности НДО 1 с увеличением частоты, что часто наблюдается в реальных физических объектах. При этом, когда НДО работал практически на линейном участке (уровень А входного воздействия был равен 0,001), степень нелинейности не превышала 10-4. В то же время для линейного динамического объекта, когда длина реализации, по которой определяется спектр БПФ, короче длины ИХ объекта, погрешности в частотной области из-за явления Гиббса достигают 6 49392008.12.30 10 , что свидетельствует о большой методической погрешности прототипа 4. Таким образом, предложенное устройство определения степени нелинейности НДО оказывается существенно точнее известного за счет определения длины импульсной характеристики объекта. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G06G 7/00
Метки: нелинейного, устройство, динамического, степени, объекта, определения, нелинейности
Код ссылки
<a href="https://by.patents.su/9-u4939-ustrojjstvo-dlya-opredeleniya-stepeni-nelinejjnosti-nelinejjnogo-dinamicheskogo-obekta.html" rel="bookmark" title="База патентов Беларуси">Устройство для определения степени нелинейности нелинейного динамического объекта</a>
Способ идентификации нелинейного динамического объекта
Номер патента: 10526
Опубликовано: 30.04.2008
Авторы: Куконин Владимир Егорович, Выставная Елена Ивановна, Петько Валерий Иванович
МПК: G06G 7/00
Метки: динамического, идентификации, способ, нелинейного, объекта
Текст:
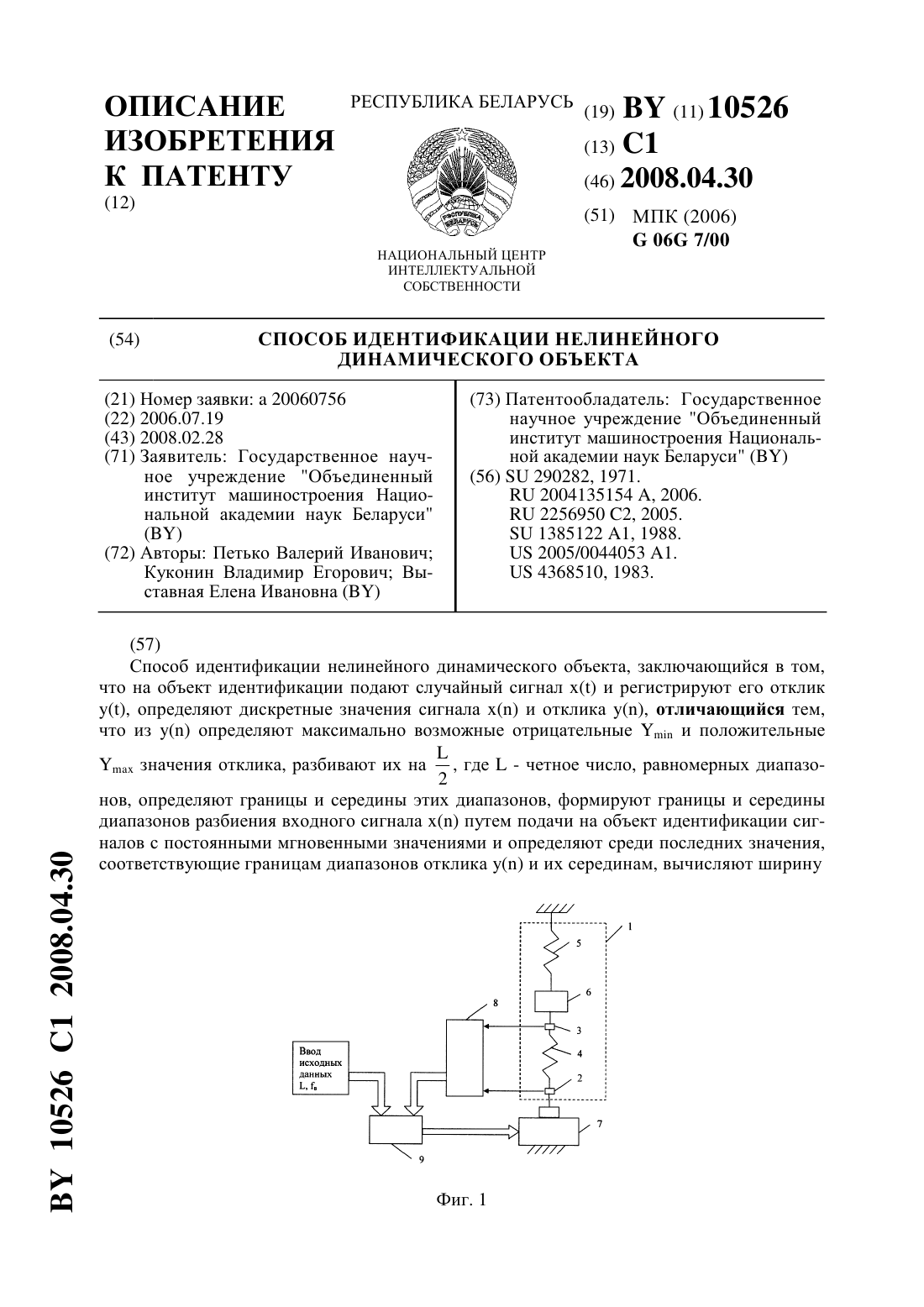
..., ) отклика НДО 1(1) . г г Для определения размерности дискретного преобразования Фурье (ДПФ), используемого при идентификации объекта, сначала определяют длину импульсной характеристики(ИХ) НДО 1. Для этого на вход НДО 1 с помощью стенда 7 подают небольшой испытательный сигнал Хи с постоянными мгновенными значениями и после установления отклика и резко убирают входной сигнал. Время от момента снятия сигнала до момента полного затухания...
Устройство для определения степени износа фрикционной накладки дискового тормоза
Номер патента: U 964
Опубликовано: 30.09.2003
Авторы: Климович Леонид Николаевич, Авдеев Эдуард Юрьевич, Сергиенко Владимир Петрович, Купреев Алексей Васильевич
МПК: F16D 66/02
Метки: дискового, накладки, устройство, износа, тормоза, степени, фрикционной, определения
Текст:
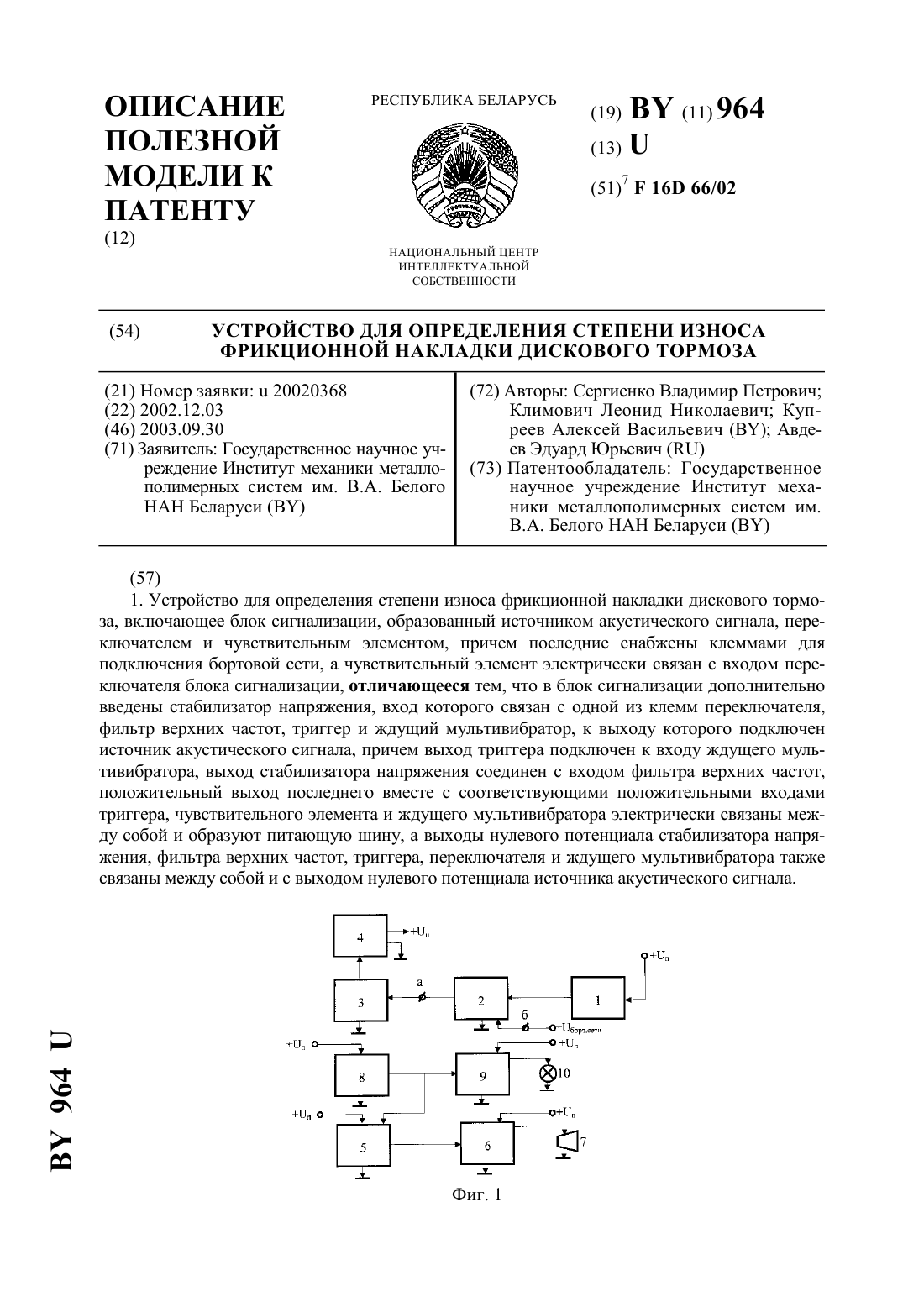
...связанные между собой симметричный мультивибратор, электронный ключ и индикатор светового сигнала, выход симметричного мультивибратора соединен с входом триггера,входы подключения положительного напряжения симметричного мультивибратора и электронного ключа соединены с питающей шиной, а их выходы нулевого потенциала 2 964 связаны с выходом нулевого потенциала источника акустического сигнала, к которому также подключен выход...
Способ идентификации линейного динамического объекта

Номер патента: 10600
Опубликовано: 30.04.2008
Авторы: Выставная Елена Ивановна, Куконин Владимир Егорович, Петько Валерий Иванович
МПК: G06F 17/10, G05B 17/02, G06F 17/15...
Метки: динамического, идентификации, объекта, способ, линейного
Текст:
...входногои выходногосигналов линейного объекта в виде не менее(21) дискретных отсчетов и определяют коэффициенты модели, решая систему где- порядковый номер временного отсчета ( равняется от 0 до 2),- коэффициенты модели линейного динамического объекта ( равняется от 0 до ),причем разностное уравнение имеет вид Вследствие того, что модель (3) имеет нерекурсивную структуру, она оказывается устойчивой. В соответствии с предлагаемым способом...
Система для регулирования выходной координаты динамического объекта
Номер патента: 8824
Опубликовано: 30.12.2006
Авторы: Розсудовский Сергей Викторович, Мацкевич Артур Николаевич
МПК: G05B 17/02, G05B 11/01
Метки: выходной, система, объекта, регулирования, координаты, динамического
Текст:
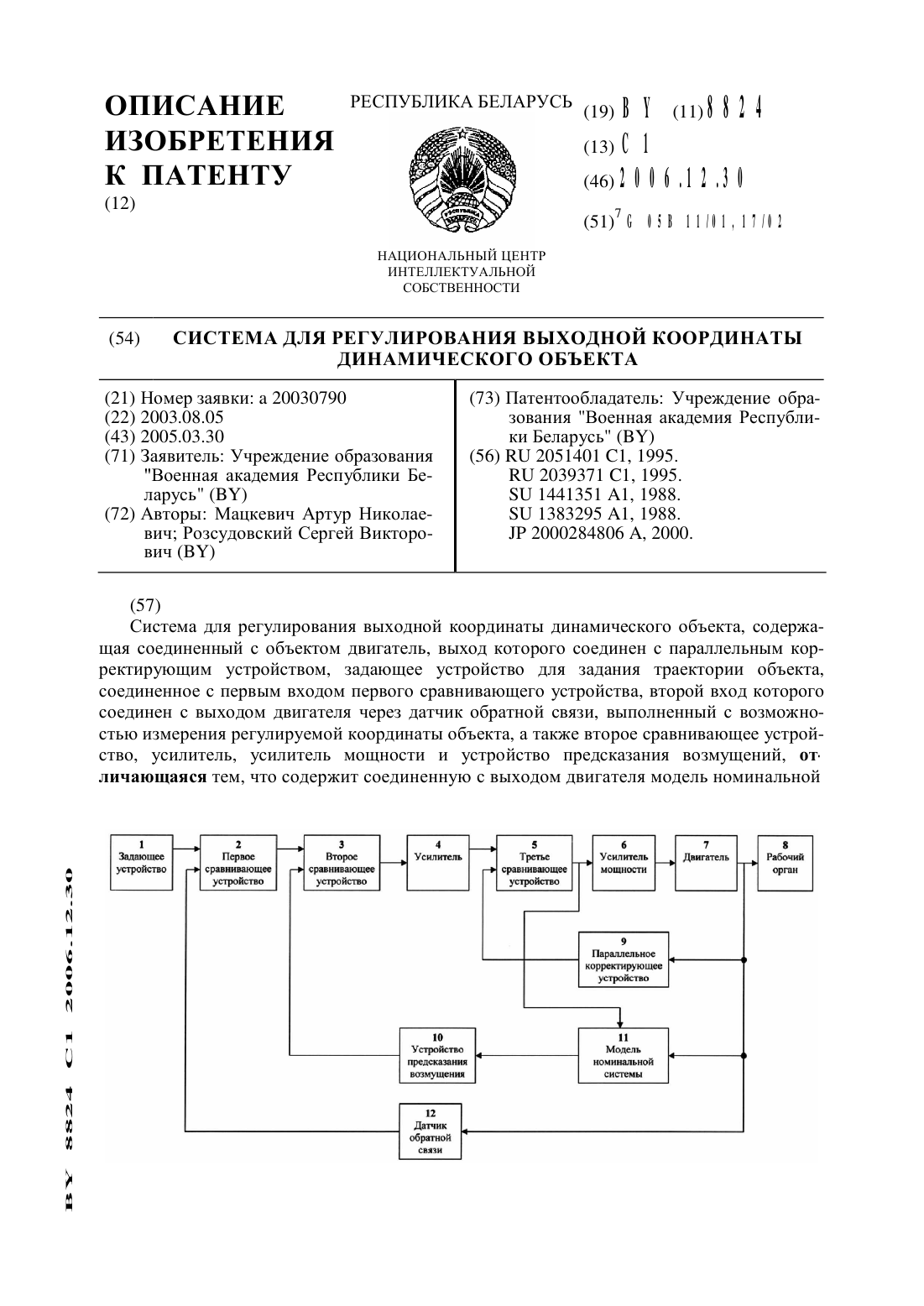
...сравнивающего устройства соединены с первым сравнивающим устройством, устройством предсказания возмущений и усилителем соответственно. При этом из устройства-прототипа исключаются генератор случайных чисел,стохастический регулятор, схема управления и ключ.На фигуре представлена функциональная схема системы для регулирования выходной координаты динамического объекта.Функциональная схема системы для регулирования выходной координаты...
Устройство для определения расстояния до места однофазного замыкания на землю в электрической сети с изолированной нейтралью

Номер патента: 5773
Опубликовано: 30.12.2003
Авторы: Сидоров Владимир Германович, Лукьяненок Михаил Юльевич, Калентионок Евгений Васильевич, Сидоров Андрей Владимирович
МПК: G01R 31/08
Метки: нейтралью, землю, расстояния, изолированной, устройство, места, сети, электрической, однофазного, определения, замыкания
Текст:
...что реальная емкость сети может значительно отличаться от моделируемой емкости на делителе напряжения в момент повреждения, т.к. емкость сети в процессе эксплуатации постоянно меняется. Задачей изобретения является повышение точности определения расстояния до места однофазного замыкания на землю. Сущность изобретения состоит в том, что устройство для определения расстояния до места однофазного замыкания на землю в электрической сети с...
Предыдущий патент: Устройство для нанесения покрытий
Следующий патент: Ветроэлектрогенератор
Случайный патент: Устройство для нанесения покрытий из металлических порошков