Устройство для определения местоположения подвижного микрообъекта
Номер патента: 17982
Опубликовано: 28.02.2014
Авторы: Курмашев Виктор Иванович, Тимошков Юрий Викторович, Тимошков Вадим Юрьевич, Сакова Анастасия Александровна
Текст
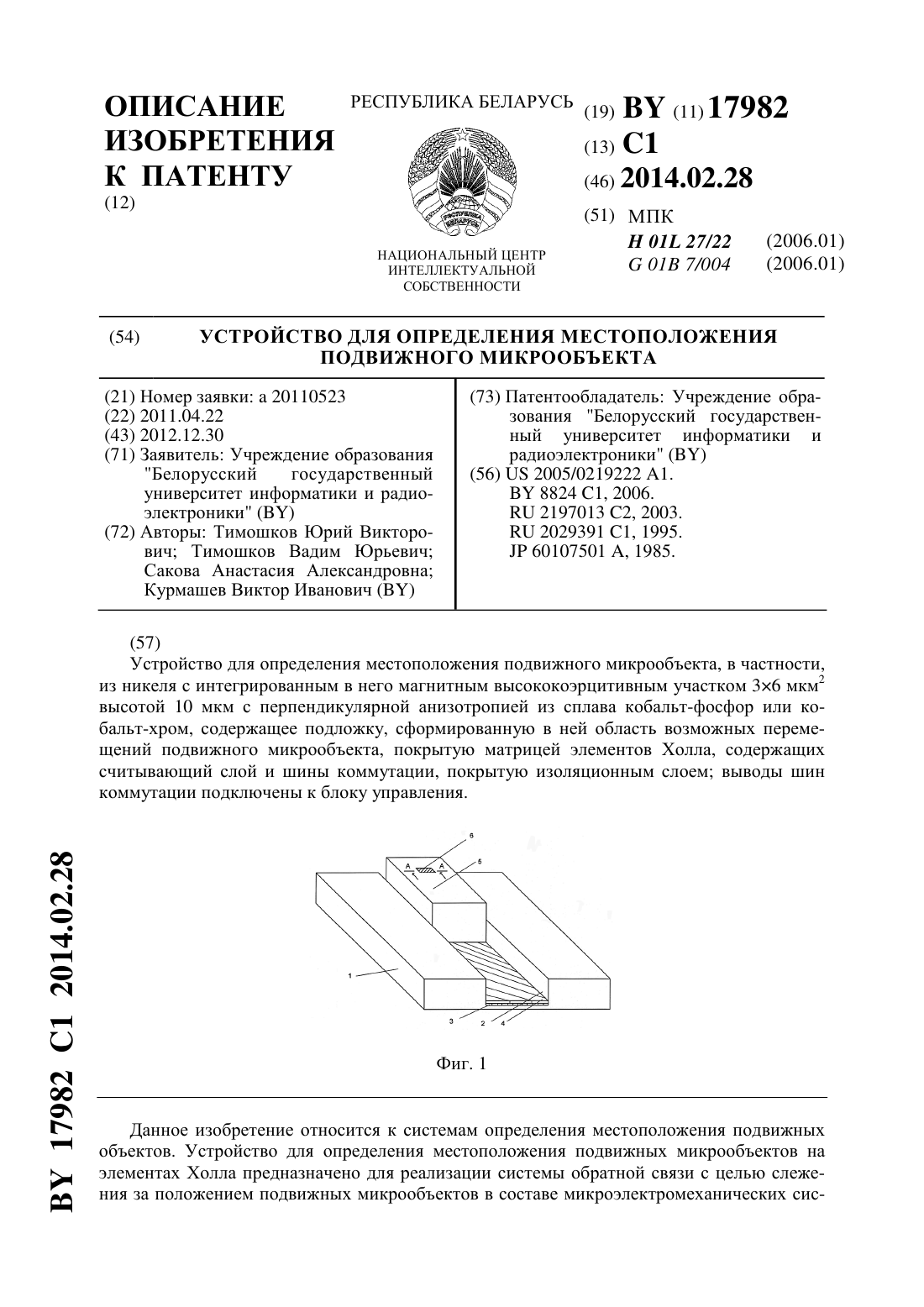
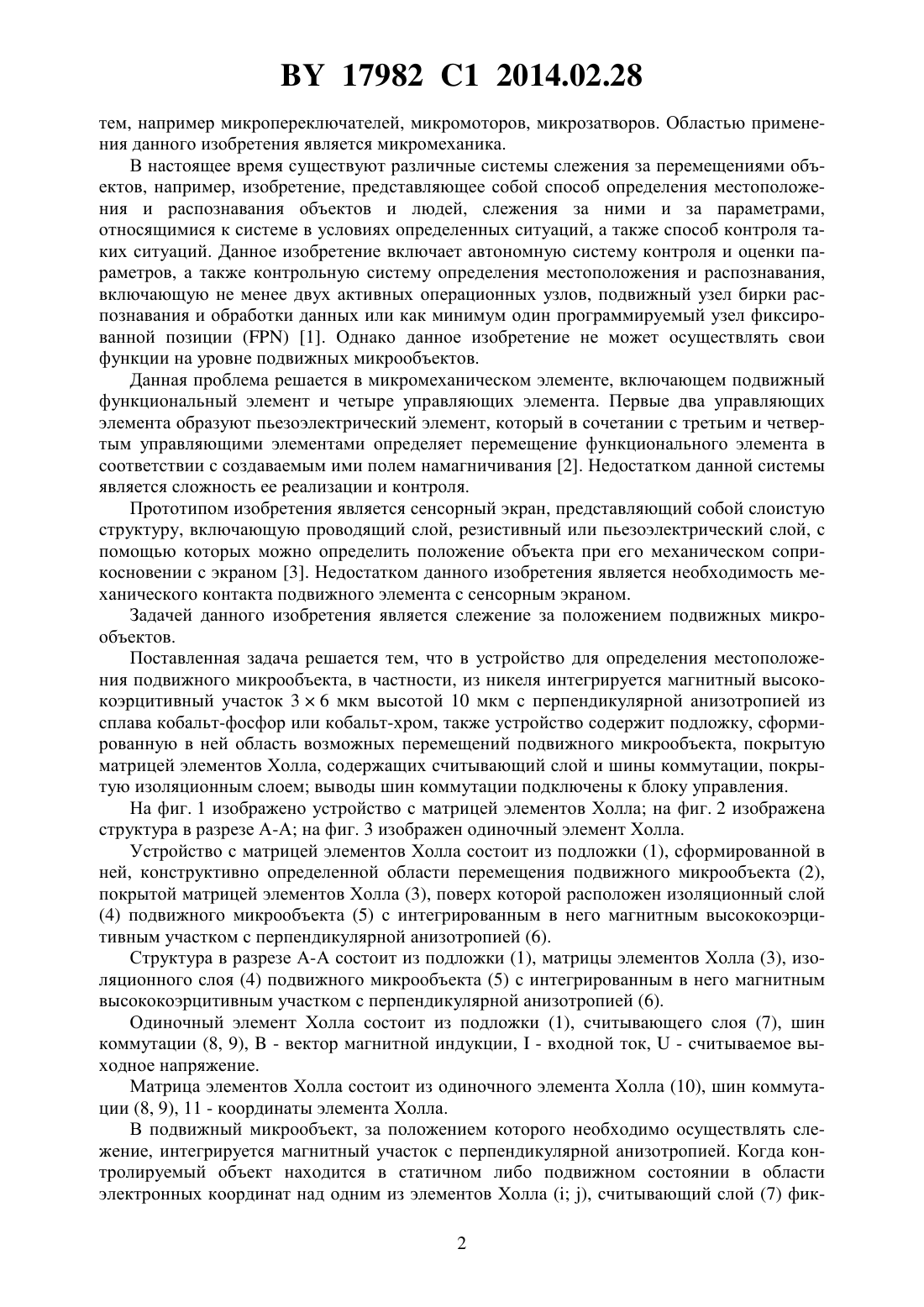
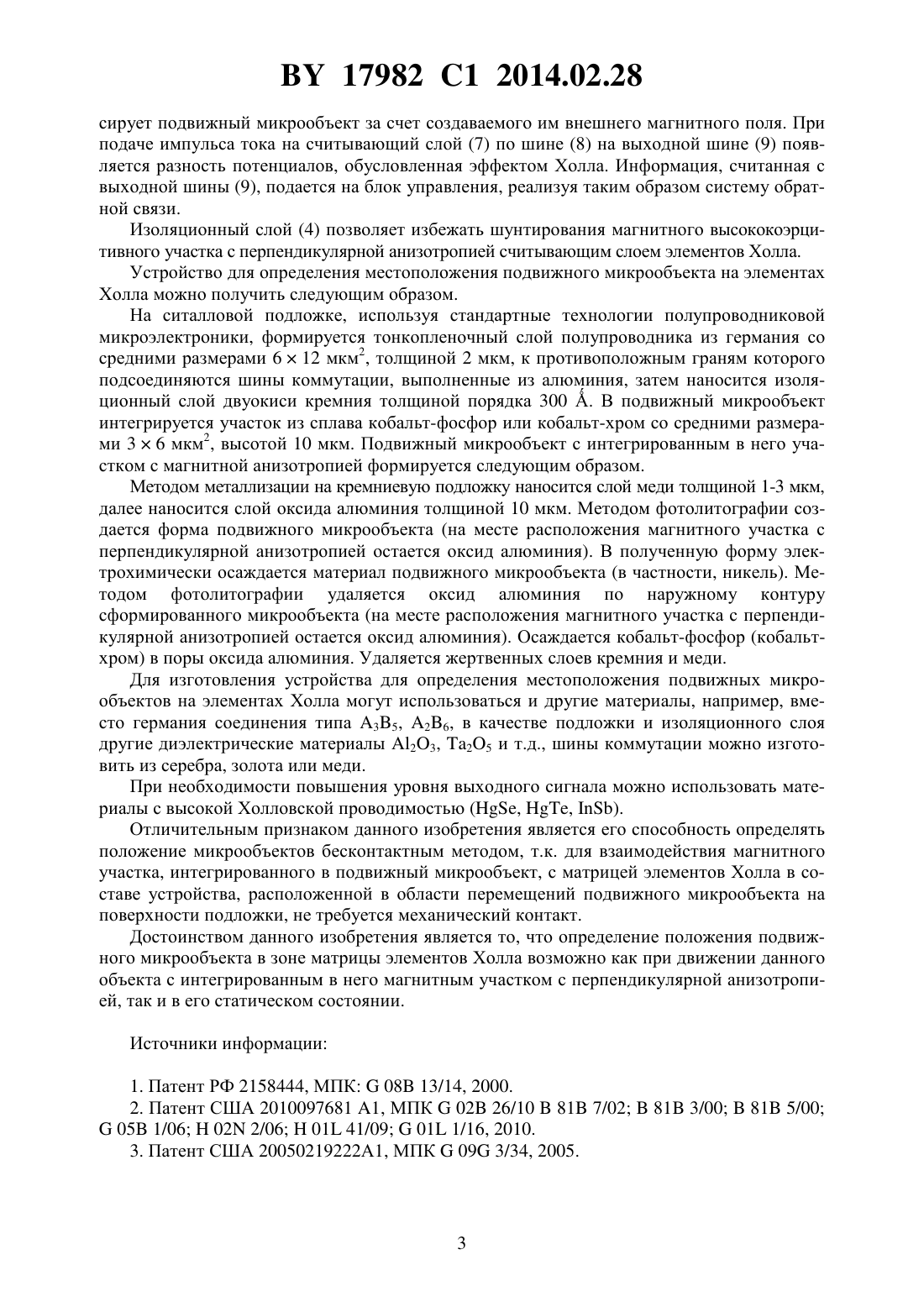
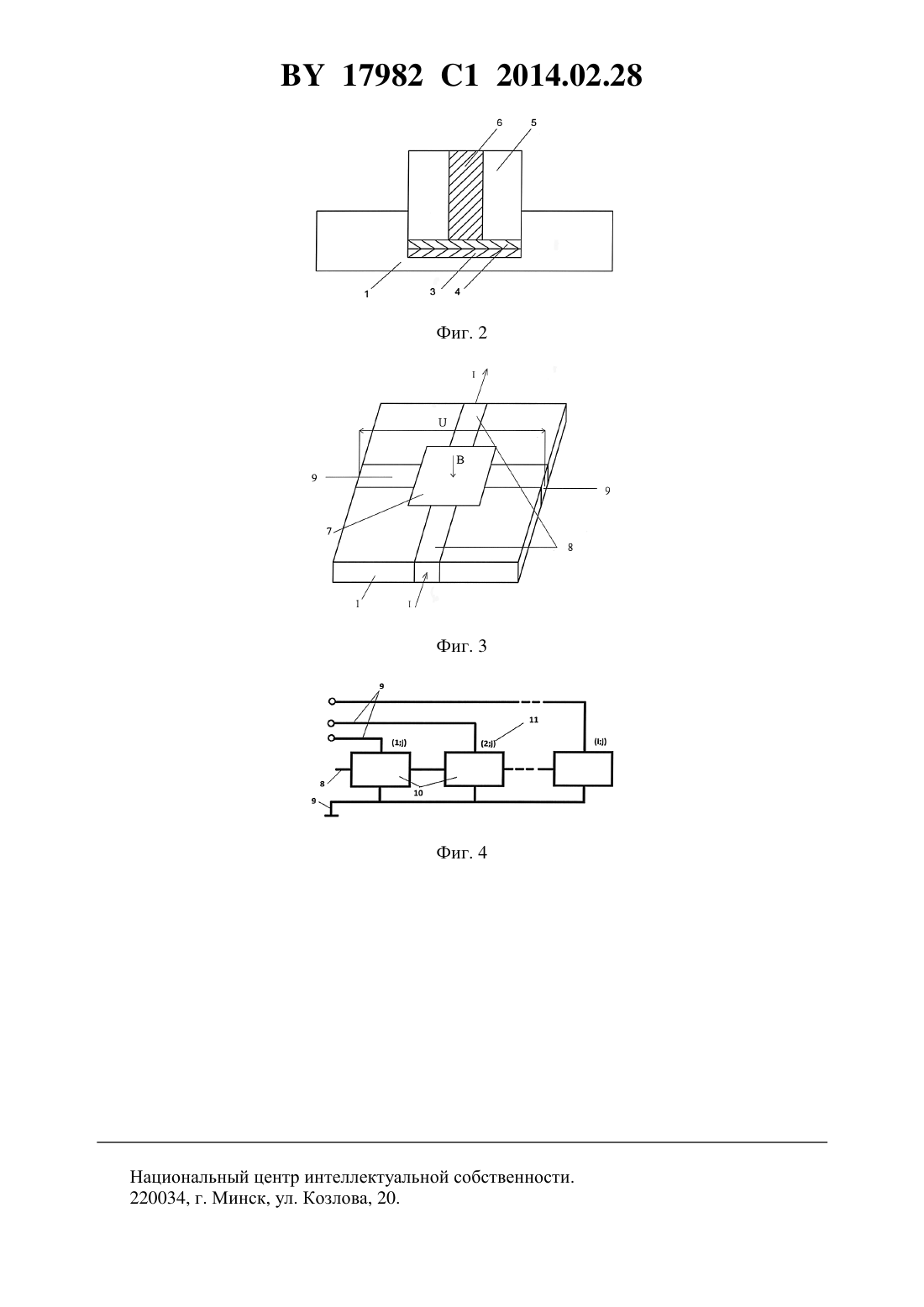
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО МИКРООБЪЕКТА(71) Заявитель Учреждение образования Белорусский государственный университет информатики и радиоэлектроники(72) Авторы Тимошков Юрий Викторович Тимошков Вадим Юрьевич Сакова Анастасия Александровна Курмашев Виктор Иванович(73) Патентообладатель Учреждение образования Белорусский государственный университет информатики и радиоэлектроники(57) Устройство для определения местоположения подвижного микрообъекта, в частности,из никеля с интегрированным в него магнитным высококоэрцитивным участком 36 мкм 2 высотой 10 мкм с перпендикулярной анизотропией из сплава кобальт-фосфор или кобальт-хром, содержащее подложку, сформированную в ней область возможных перемещений подвижного микрообъекта, покрытую матрицей элементов Холла, содержащих считывающий слой и шины коммутации, покрытую изоляционным слоем выводы шин коммутации подключены к блоку управления. Фиг. 1 Данное изобретение относится к системам определения местоположения подвижных объектов. Устройство для определения местоположения подвижных микрообъектов на элементах Холла предназначено для реализации системы обратной связи с целью слежения за положением подвижных микрообъектов в составе микроэлектромеханических сис 17982 1 2014.02.28 тем, например микропереключателей, микромоторов, микрозатворов. Областью применения данного изобретения является микромеханика. В настоящее время существуют различные системы слежения за перемещениями объектов, например, изобретение, представляющее собой способ определения местоположения и распознавания объектов и людей, слежения за ними и за параметрами,относящимися к системе в условиях определенных ситуаций, а также способ контроля таких ситуаций. Данное изобретение включает автономную систему контроля и оценки параметров, а также контрольную систему определения местоположения и распознавания,включающую не менее двух активных операционных узлов, подвижный узел бирки распознавания и обработки данных или как минимум один программируемый узел фиксированной позиции 1. Однако данное изобретение не может осуществлять свои функции на уровне подвижных микрообъектов. Данная проблема решается в микромеханическом элементе, включающем подвижный функциональный элемент и четыре управляющих элемента. Первые два управляющих элемента образуют пьезоэлектрический элемент, который в сочетании с третьим и четвертым управляющими элементами определяет перемещение функционального элемента в соответствии с создаваемым ими полем намагничивания 2. Недостатком данной системы является сложность ее реализации и контроля. Прототипом изобретения является сенсорный экран, представляющий собой слоистую структуру, включающую проводящий слой, резистивный или пьезоэлектрический слой, с помощью которых можно определить положение объекта при его механическом соприкосновении с экраном 3. Недостатком данного изобретения является необходимость механического контакта подвижного элемента с сенсорным экраном. Задачей данного изобретения является слежение за положением подвижных микрообъектов. Поставленная задача решается тем, что в устройство для определения местоположения подвижного микрообъекта, в частности, из никеля интегрируется магнитный высококоэрцитивный участок 36 мкм высотой 10 мкм с перпендикулярной анизотропией из сплава кобальт-фосфор или кобальт-хром, также устройство содержит подложку, сформированную в ней область возможных перемещений подвижного микрообъекта, покрытую матрицей элементов Холла, содержащих считывающий слой и шины коммутации, покрытую изоляционным слоем выводы шин коммутации подключены к блоку управления. На фиг. 1 изображено устройство с матрицей элементов Холла на фиг. 2 изображена структура в разрезе А-А на фиг. 3 изображен одиночный элемент Холла. Устройство с матрицей элементов Холла состоит из подложки (1), сформированной в ней, конструктивно определенной области перемещения подвижного микрообъекта (2),покрытой матрицей элементов Холла (3), поверх которой расположен изоляционный слой(4) подвижного микрообъекта (5) с интегрированным в него магнитным высококоэрцитивным участком с перпендикулярной анизотропией (6). Структура в разрезе А-А состоит из подложки (1), матрицы элементов Холла (3), изоляционного слоя (4) подвижного микрообъекта (5) с интегрированным в него магнитным высококоэрцитивным участком с перпендикулярной анизотропией (6). Одиночный элемент Холла состоит из подложки (1), считывающего слоя (7), шин коммутации (8, 9),- вектор магнитной индукции,- входной ток,- считываемое выходное напряжение. Матрица элементов Холла состоит из одиночного элемента Холла (10), шин коммутации (8, 9), 11 - координаты элемента Холла. В подвижный микрообъект, за положением которого необходимо осуществлять слежение, интегрируется магнитный участок с перпендикулярной анизотропией. Когда контролируемый объект находится в статичном либо подвижном состоянии в области электронных координат над одним из элементов Холла ( ), считывающий слой (7) фик 2 17982 1 2014.02.28 сирует подвижный микрообъект за счет создаваемого им внешнего магнитного поля. При подаче импульса тока на считывающий слой (7) по шине (8) на выходной шине (9) появляется разность потенциалов, обусловленная эффектом Холла. Информация, считанная с выходной шины (9), подается на блок управления, реализуя таким образом систему обратной связи. Изоляционный слой (4) позволяет избежать шунтирования магнитного высококоэрцитивного участка с перпендикулярной анизотропией считывающим слоем элементов Холла. Устройство для определения местоположения подвижного микрообъекта на элементах Холла можно получить следующим образом. На ситалловой подложке, используя стандартные технологии полупроводниковой микроэлектроники, формируется тонкопленочный слой полупроводника из германия со средними размерами 612 мкм 2, толщиной 2 мкм, к противоположным граням которого подсоединяются шины коммутации, выполненные из алюминия, затем наносится изоляционный слой двуокиси кремния толщиной порядка 300 . В подвижный микрообъект интегрируется участок из сплава кобальт-фосфор или кобальт-хром со средними размерами 36 мкм 2, высотой 10 мкм. Подвижный микрообъект с интегрированным в него участком с магнитной анизотропией формируется следующим образом. Методом металлизации на кремниевую подложку наносится слой меди толщиной 1-3 мкм,далее наносится слой оксида алюминия толщиной 10 мкм. Методом фотолитографии создается форма подвижного микрообъекта (на месте расположения магнитного участка с перпендикулярной анизотропией остается оксид алюминия). В полученную форму электрохимически осаждается материал подвижного микрообъекта (в частности, никель). Методом фотолитографии удаляется оксид алюминия по наружному контуру сформированного микрообъекта (на месте расположения магнитного участка с перпендикулярной анизотропией остается оксид алюминия). Осаждается кобальт-фосфор (кобальтхром) в поры оксида алюминия. Удаляется жертвенных слоев кремния и меди. Для изготовления устройства для определения местоположения подвижных микрообъектов на элементах Холла могут использоваться и другие материалы, например, вместо германия соединения типа 35, 26, в качестве подложки и изоляционного слоя другие диэлектрические материалы 23, 25 и т.д., шины коммутации можно изготовить из серебра, золота или меди. При необходимости повышения уровня выходного сигнала можно использовать материалы с высокой Холловской проводимостью (, , ). Отличительным признаком данного изобретения является его способность определять положение микрообъектов бесконтактным методом, т.к. для взаимодействия магнитного участка, интегрированного в подвижный микрообъект, с матрицей элементов Холла в составе устройства, расположенной в области перемещений подвижного микрообъекта на поверхности подложки, не требуется механический контакт. Достоинством данного изобретения является то, что определение положения подвижного микрообъекта в зоне матрицы элементов Холла возможно как при движении данного объекта с интегрированным в него магнитным участком с перпендикулярной анизотропией, так и в его статическом состоянии. Источники информации 1. Патент РФ 2158444, МПК 08 13/14, 2000. 2. Патент США 2010097681 1, МПК 02 26/1081 7/0281 3/0081 5/0005 1/0602 2/0601 41/0901 1/16, 2010. 3. Патент США 20050219222 А 1, МПК 09 3/34, 2005. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: G01B 7/004, H01L 27/22
Метки: устройство, подвижного, микрообъекта, местоположения, определения
Код ссылки
<a href="https://by.patents.su/4-17982-ustrojjstvo-dlya-opredeleniya-mestopolozheniya-podvizhnogo-mikroobekta.html" rel="bookmark" title="База патентов Беларуси">Устройство для определения местоположения подвижного микрообъекта</a>
Устройство для определения местоположения биологически активных точек на теле человека

Номер патента: 14891
Опубликовано: 30.10.2011
Авторы: Лисенков Борис Николаевич, Щербатюк Владимир Андреевич, Лисенкова Алла Мустафовна
МПК: A61H 39/02
Метки: точек, определения, устройство, активных, человека, теле, биологически, местоположения
Текст:
...и по сравнению с прототипом,может быть достигнуто путем уменьшения длительности зондирующих импульсов и увеличения их скважности. Например, формирование импульсов и применение устройств выборки-хранения субмикросекундного диапазона позволяет снизить дозу зондирующего излучения гораздо более простыми средствами, чем в известном устройстве, основанном на применении конструктивных методов. В отличие от прототипа облучение поверхности кожи...
Устройство для определения местоположения биологически активных точек на теле человека
Номер патента: 13914
Опубликовано: 30.12.2010
Авторы: Железнякова Татьяна Александровна, Щербатюк Владимир Андреевич, Лисенкова Алла Мустафовна, Лисенков Борис Николаевич
МПК: A61B 5/05, A61H 39/00
Метки: теле, точек, местоположения, активных, биологически, определения, человека, устройство
Текст:
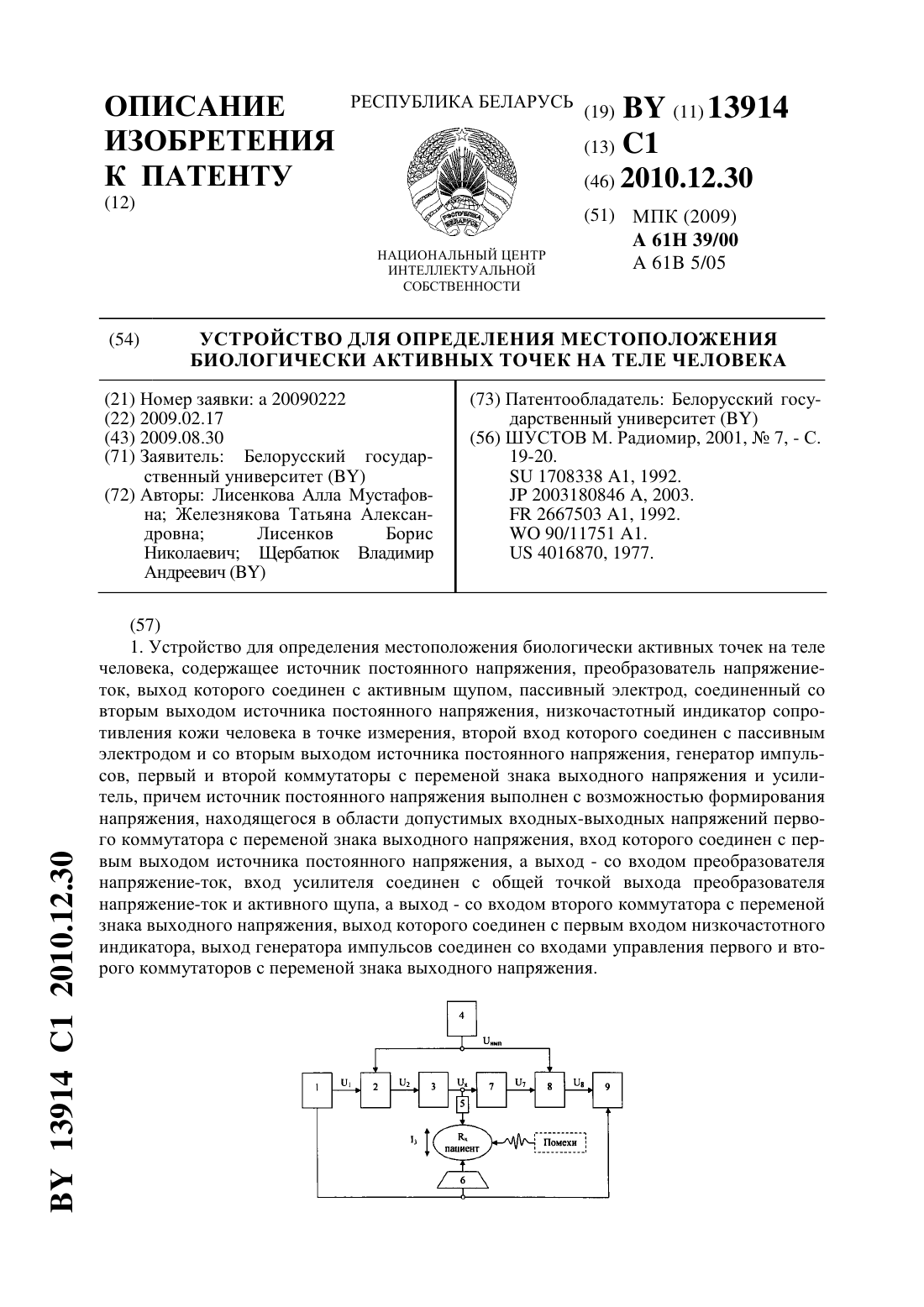
...проводом и вторым выходом источника 1 постоянного напряжения. Вход управления второго коммутатора 8 с переменой знака выходного напряжения соединен с выходом генератора 4 импульсов. Кроме того, заявляемое устройство содержит источник питания, который обеспечивает работоспособность всех электронных узлов. Источник 1 постоянного напряжения представляет собой стабилизатор напряжения,выходное напряжение которого должно находиться в области...
Способ определения местоположения объекта
Номер патента: 7874
Опубликовано: 28.02.2006
Авторы: Горобец Вадим Анатольевич, Петухов Владимир Олегович, Нойман Петер, Шренк Людвиг, Шренк Рената, Литвинов Валентин Вадимович
МПК: G01S 5/16
Метки: определения, объекта, способ, местоположения
Текст:
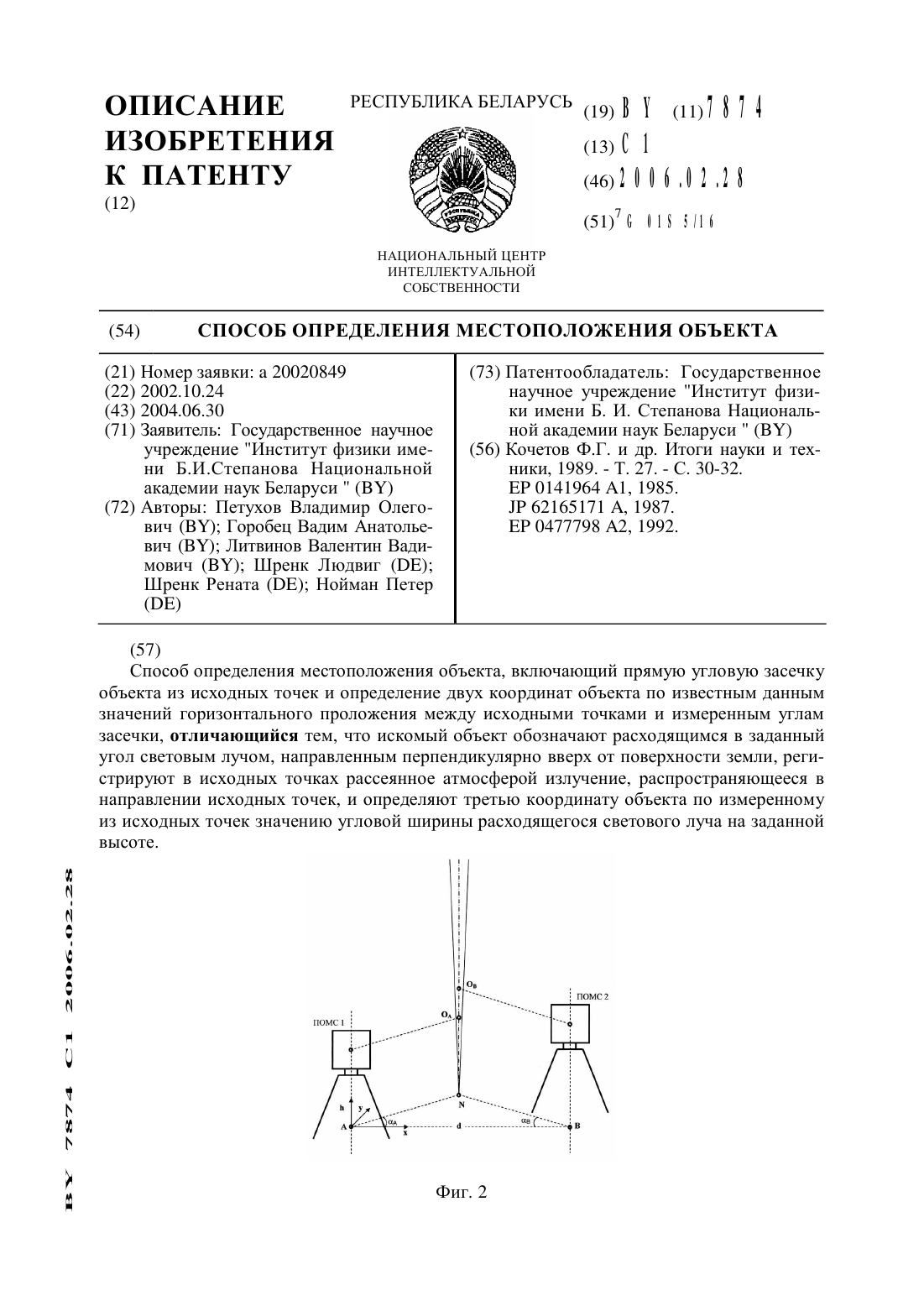
...ПОМС используют излучение, рассеянное атмосферой (в частности ее аэрозольной или молекулярной составляющими) в направлении ПОМС.В непосредственной близости от объекта, Координаты которого необходимо определить, или на нем самом устанавливают оптическую систему, формирующую световой луч,обозначающий этот объект (прожектор). Он может представлять собой как ламповую, так и лазерную систему с формирующей световой луч оптикой....
Способ определения местоположения объектов
Номер патента: 6062
Опубликовано: 30.03.2004
Авторы: Демьяненко Анатолий Валентинович, Макаров Александр Иванович, Чалый Александр Андреевич
МПК: G01S 5/02
Метки: способ, определения, местоположения, объектов
Текст:
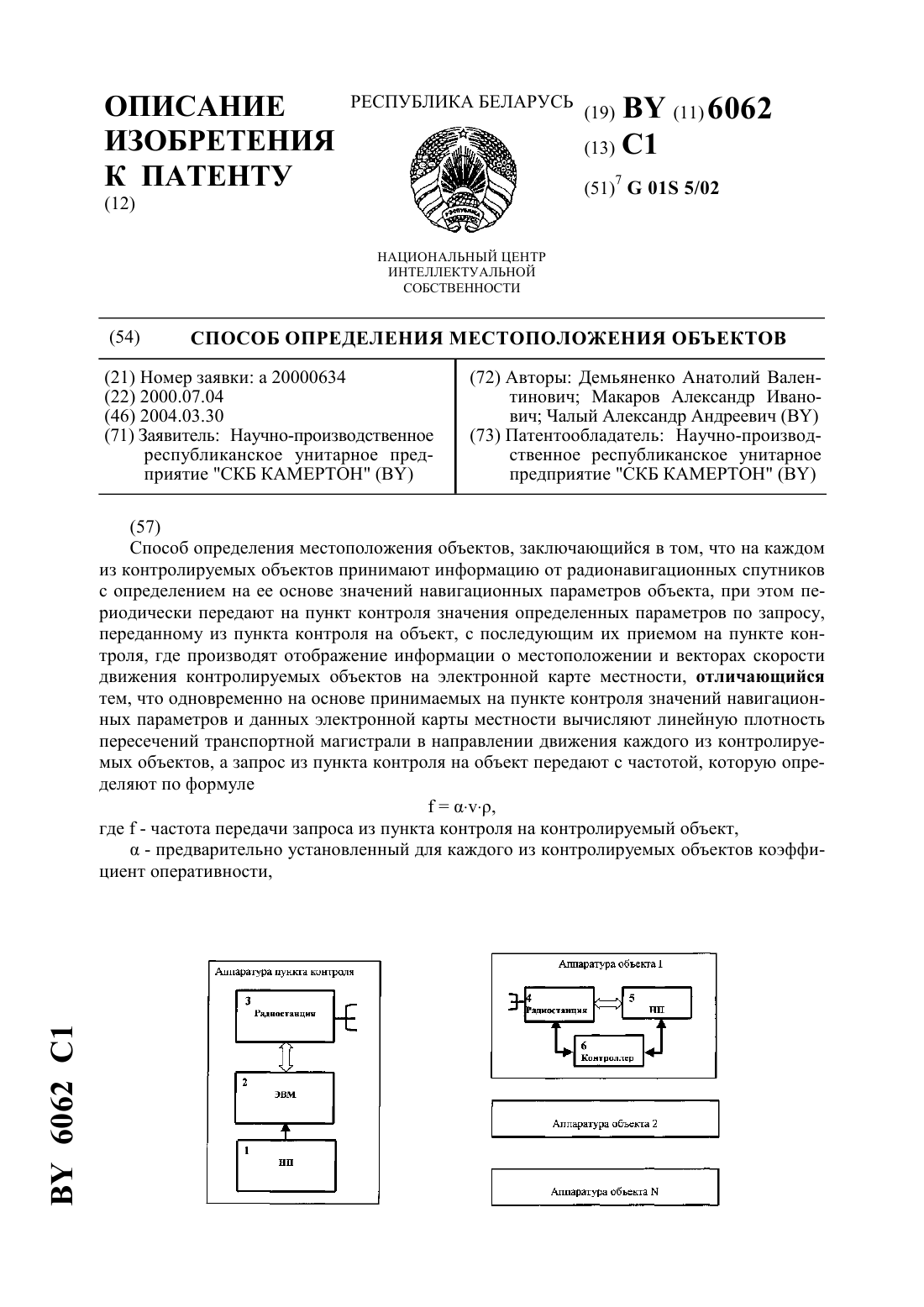
...каждого из объектов, характеризуемой коэффициентом оперативности. Это означает, что не каждый из контролируемых объектов следует опрашивать одинаково часто. Если местоположение некоторых объектов необходимо знать менее точно по сравнению с каким-то более важным объектом, то их и следует реже опрашивать. Следующим шагом является учет возможной смены маршрута, характеризуемый линейной плотностью перекрестков по направлению движения...
Система и способ определения местоположения мобильного абонента сотовой сети связи
Номер патента: 12647
Опубликовано: 30.12.2009
Автор: Дедунович Михаил Алексеевич
МПК: G01S 3/02
Метки: абонента, сети, система, местоположения, связи, определения, способ, сотовой, мобильного
Текст:
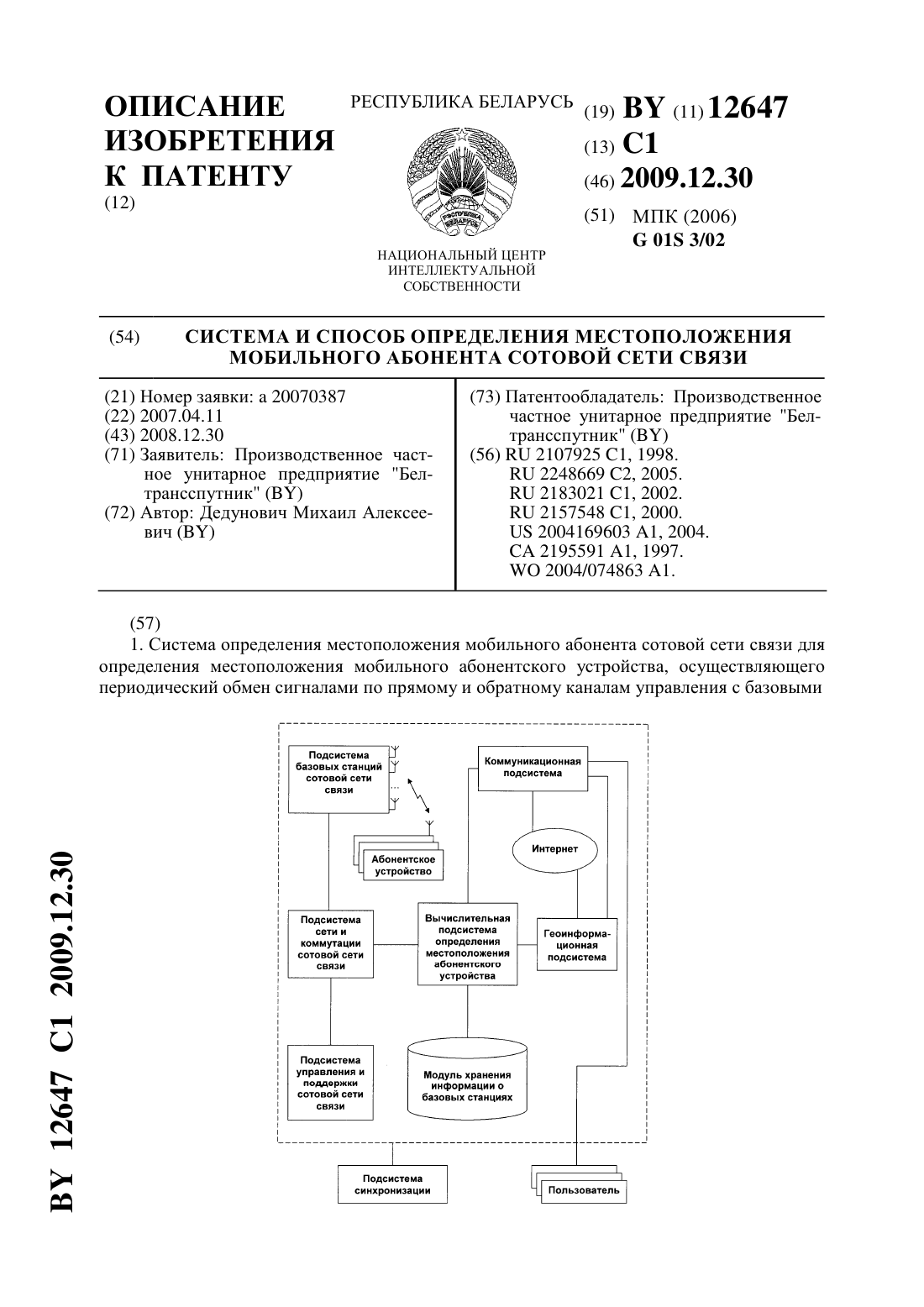
...сотовой сети связи, и которые косвенно или прямо несут в себе информацию о расстоянии между ними, например, индекс- индекс временной коррекции, предназначенный для того, чтобы компенсировать временную задержку от разных абонентов, находящихся на разных расстояниях от базовой станции для правильного попадания в выделенный абоненту тайм-слот. Может рассчитываться контроллером базовых станций этого района, абонентским устройством, базовой...
Предыдущий патент: Устройство для улавливания тягового органа элеватора при его обрыве
Следующий патент: Способ дифференциальной диагностики пароксизма эпилептического генеза и нейрогенного обморока
Случайный патент: Водоохлаждающий элемент