Способ определения местоположения объекта
Номер патента: 7874
Опубликовано: 28.02.2006
Авторы: Шренк Людвиг, Шренк Рената, Петухов Владимир Олегович, Нойман Петер, Литвинов Валентин Вадимович, Горобец Вадим Анатольевич
Текст
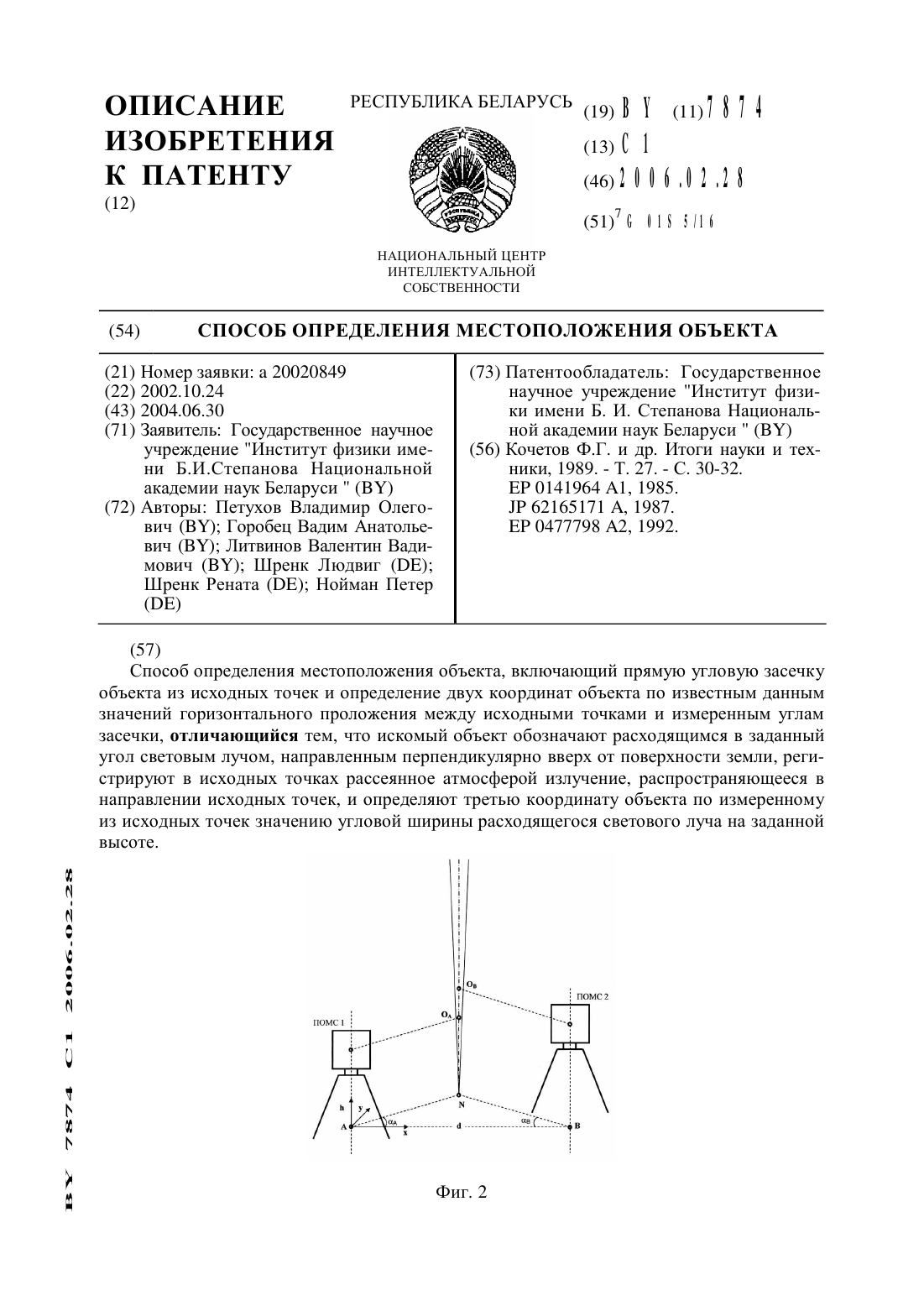
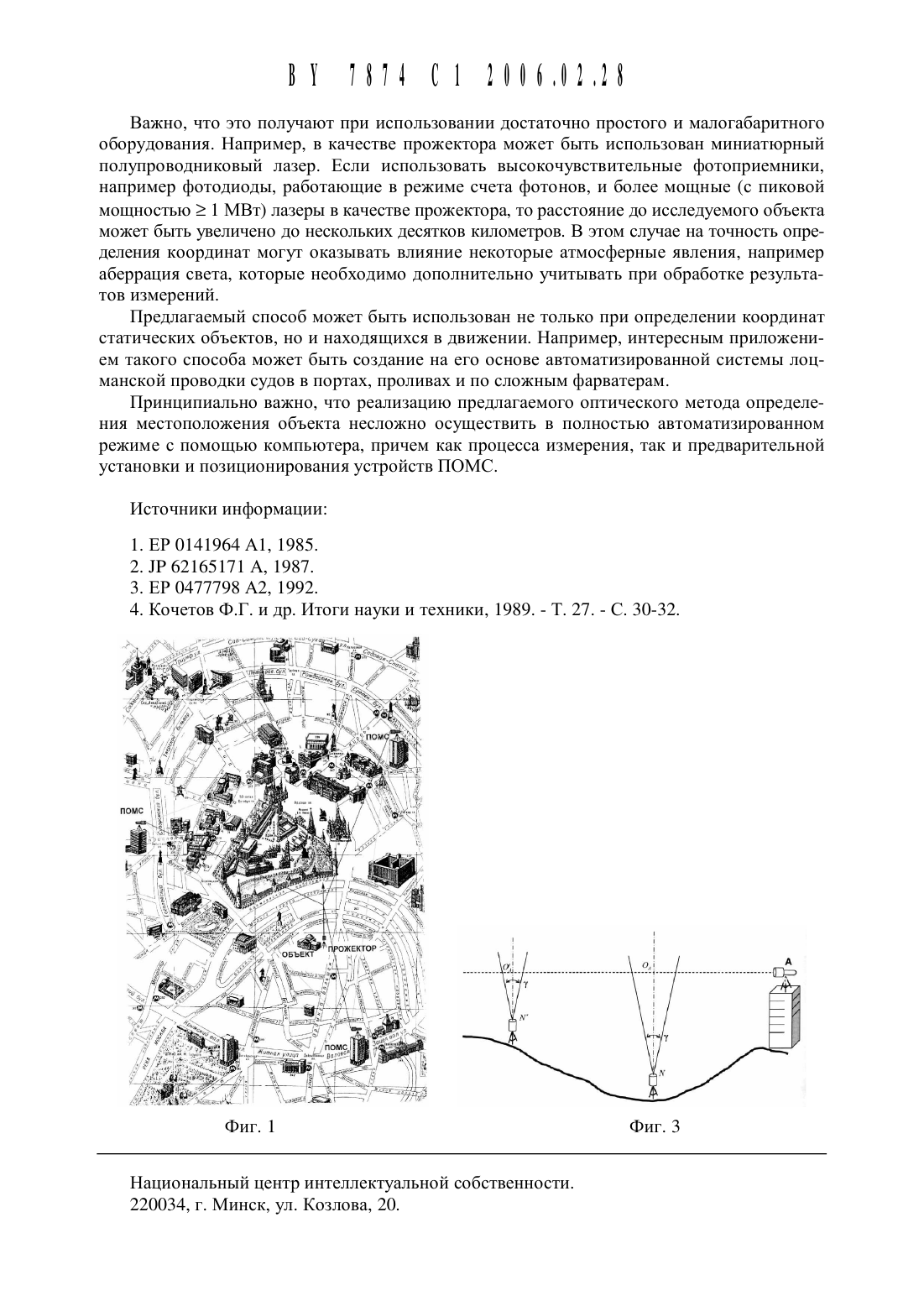
(54) СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА(71) Заявитель Государственное научное учреждение Институт физики имени Б.И.Степанова Национальной академии наук Беларуси (ВУ)(72) Авторы Петухов Владимир Олегович (ВУ) Горобец Вадим Анатольевич (ВУ) Литвинов Валентин Вадимович (ВУ) Шренк Людвиг (ВЕ) Шренк Рената (ВЕ) Нойман Петер(73) Патентообладатель Государственное научное учреждение Институт физики имени Б. И. Степанова Национальной академии наук Беларуси (ВУ)Способ определения местоположения объекта, включающий прямую угловую засечку объекта из исходных точек и определение двух координат объекта по известным данным значений горизонтального проложения между исходными точками и измеренным углам засечки, отличающийся тем, что искомый объект обозначают расходящимся в заданный угол световым лучом, направленным перпендикулярно вверх от поверхности земли, регистрируют в исходных точках рассеянное атмосферой излучение, распространяющееся в направлении исходных точек, и определяют третью координату объекта по измеренному из исходных точек значению угловой щирины расходящегося светового луча на заданной высоте.Изобретение относится К прикладной геодезии и может быть использовано при определении координат Х, У, Н искомого объекта, расположенного от исходных геодезических пунктов на расстояниях от нескольких сотен метров до нескольких десятков километров,например при определении координат зданий, сооружений, систем коммуникаций и связи и т.д., в том числе на местности, закрытой для прямого наблюдения пересеченным рельефом или зданиями и сооружениями в условиях города.Известны способы определения координат отдельных объектов, например развиваемые в последнее время картографирование с помощью аэрофотосъемок и съемок из космоса 1, 2, а также позиционирование объектов на местности через систему спутниковой связи 3. Однако такие способы чрезвычайно дороги и не всегда обеспечивают требуемую точность определения местоположения объекта. Кроме того, с их помощью практически невозможно определить третью координату местоположения объекта - высоту над уровнем моря (Н).Наиболее близким по совокупности и значимости решаемых задач, а также по технической сущности к предлагаемому изобретению является способ невизуального дистанционного определения координат объекта с помощью автоматизированного комплекса на основе сервотеодолитов (лазерных теодолитов, вращение зрительной трубы которых производят с помощью щаговых двигателей) 4, включающего в себя несколько (не менее двух) электронных теодолитов с блоками управления на основе ЭВМ. При этом пространственное положение снимаемого объекта определяется на основе прямой угловой засечки из исходных точек электронными теодолитами отражателя, установленного в определяемой точке.Однако такой способ невозможно применять при определении координат объекта,расположенного на закрытой для визуального наблюдения местности, т.е. в случае нахождения на линиях засечки между исходными и определяемой точками других объектов или природных возвыщений.Задачей настоящего изобретения является определение всех координат объекта, скрь 1 того от наблюдения различными помехами.Поставленная задача рещается таким образом. Искомый объект обозначают расходящимся в заданный угол световым лучом, направленным перпендикулярно вверх от поверхности земли, и регистрируют в исходных точках рассеянное атмосферой излучение,распространяющееся в направлении исходных точек. Затем производят прямую угловую засечку светового луча из исходных точек и определяют две координаты объекта по известным данным значений горизонтального проложения между исходными точками и измеренным углам засечки. Для определения третьей координаты дополнительно измеряют из исходных точек угловую щирину расходящегося луча на заданной высоте.Предлагаемый способ поясняется фиг. 1, 2 и 3. По периметру местности, например,города или больщого района крупного города, в нескольких примерно равноудаленных точках (как показано на фиг. 1, это могут быть крыши зданий) устанавливаются прецизионные оптико-механические системы (ПОМС). Такие системы, в отличие от используемых в прототипе лазерных сервотеодолитов, представляют собой пассивные фотоприемные системы, что значительно удешевляет применяемое для реализации способа оборудование. Они включают в себя жесткое основание, снабженное демпфирующим или гироскопическим устройством, гасящим различного рода колебания и вибрации, и смонтированный на нем прецизионный оптико-механический узел, способный перемещаться в горизонтальном и вертикальном положениях с высокой точностью позиционирования. На механическом подвижном узле крепится оптико-электронное приемное устройство. Оптическая часть данного устройства состоит из фотоприемника (например чувствительного фотодиода) и оптических элементов (например объектива). В качестве источника оптического сигнала для фотоприемников ПОМС используют излучение, рассеянное атмосферой (в частности ее аэрозольной или молекулярной составляющими) в направлении ПОМС.В непосредственной близости от объекта, Координаты которого необходимо определить, или на нем самом устанавливают оптическую систему, формирующую световой луч,обозначающий этот объект (прожектор). Он может представлять собой как ламповую, так и лазерную систему с формирующей световой луч оптикой. Механический узел снабжают устройством (типа отвеса или системы жидкостных уровней) для направления светового луча с высокой точностью строго перпендикулярно поверхности земли.Способ определения местоположения искомого объекта на местности поясняется фиг. 2. На ней буквами А и В обозначены исходные точки с установленными на них ПОМС, а буквой Ы - определяемая точка, в которой установлен обозначающий ее прожектор. Через О А и ОВ обозначены условные точки на оси светового луча прожектора, из которых приходит в направлении соответствующей ПОМС регистрируемый фотоприемниками максимум рассеянного атмосферой излучения.В память ЭВМ вводят значения горизонтального проложения (1 линии АВ и превыщения 11 между исходными точками. После этого в процессе съемки для каждой определяемой точки измеряют два горизонтальных угла (осА и сев), которые автоматически вводятся в ЭВМ. По исходным данным и измеренным углам с помощью ЭВМ вычисляют пространственные прямоугольные координаты снимаемых точек. Для удобства работы ЭВМ перед началом съемки нули приборов можно направить вдоль линии АВ в противоположных направлениях, а одну из точек (например А) принять за начало системы координат,оси которой также показаны на фиг. 2. При необходимости условные пространственные координаты снимаемых точек можно пересчитать в общегосударственные (международные),используя координаты А и В. Формулы для вычисления координат точки М имеют видБазовые направления между ПОМС (линия АВ), от которых отсчитываются углы на подсвечивающий объект луч прожектора, предварительно попарно провещиваются. Если ПОМС попарно находятся в прямой видимости, то расстояние между ними (проложение (1) и базовые направления определяют оптическими методами, например используют дополнительную лазерную систему. Затем измеряют углы от базовых направлений до луча прожектора. Значение этих углов при известном расстоянии между ПОМС однозначно позволяет определить искомые координаты объекта относительно ПОМС.Определение третьей координаты поясняется на фиг. 3. Для определения этой координаты важно, что луч обозначающего объект прожектора делают расходящимся в заданный угол у. Тогда щирина луча на заданной высоте пропорциональна отрезку О АН на фиг. 2 и 3. Ширину луча на заданной высоте вычисляют по измеренной из исходной точки А угловой щирине луча и расстоянию до оси светового луча (фиг. 2), которое определяют из известных координат исходной точки А и полученных ранее двух координат объекта. Полученное в результате значение отрезка ОАЫ является третьей координатой объекта относительно ПОМС.Зная географические координаты (широту, долготу и высоту над уровнем моря) хотя бы одной ПОМС или эталонного (с известными координатами) для данной местности объекта,определяют и географические координаты заданного объекта по полученным относительным координатам.Работоспособность способа определения местоположения объекта подтверждают оценочные расчеты, компьютерное моделирование и физические эксперименты. При оценках расстояние от ПОМС до искомого объекта задавалось равным 5 км, а точность углового позиционирования ПОМС - не хуже 4 (угловые секунды), что несложно достигнуть с помощью сравнительно простого устройства на базе щагового двигателя. При соответствующем подборе параметров и характеристик узлов и элементов (чувствительность фотоприемника, мощность прожектора, точность механизмов позиционирования ПОМС и прецессии прожектора и т.д.) суммарная ощибка измерений всех координат заданного объекта не превыщает 0,5 м.Важно, что это получают при использовании достаточно простого и малогабаритного оборудования. Например, в качестве прожектора может быть использован Миниатюрный полупроводниковый лазер. Если использовать высокочувствительные фотоприемники,например фотодиоды, работающие в режиме счета фотонов, и более мощные (с пиковой мощностью 2 1 МВт) лазеры в Качестве прожектора, то расстояние до исследуемого объекта может быть увеличено до нескольких десятков километров. В этом случае на точность определения координат могут оказывать влияние некоторые атмосферные явления, например аберрация света, которые необходимо дополнительно учитывать при обработке результатов измерений.Предлагаемый способ может быть использован не только при определении координат статических объектов, но и находящихся в движении. Например, интересным приложением такого способа может быть создание на его основе автоматизированной системы лоцманской проводки судов в портах, проливах и по сложным фарватерам.Принципиально важно, что реализацию предлагаемого оптического метода определения местоположения объекта несложно осуществить в полностью автоматизированном режиме с помощью компьютера, причем как процесса измерения, так и предварительной установки и позиционирования устройств ПОМС.Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01S 5/16
Метки: объекта, определения, местоположения, способ
Код ссылки
<a href="https://by.patents.su/4-7874-sposob-opredeleniya-mestopolozheniya-obekta.html" rel="bookmark" title="База патентов Беларуси">Способ определения местоположения объекта</a>
Способ определения местоположения объектов
Номер патента: 6062
Опубликовано: 30.03.2004
Авторы: Демьяненко Анатолий Валентинович, Чалый Александр Андреевич, Макаров Александр Иванович
МПК: G01S 5/02
Метки: определения, местоположения, способ, объектов
Текст:
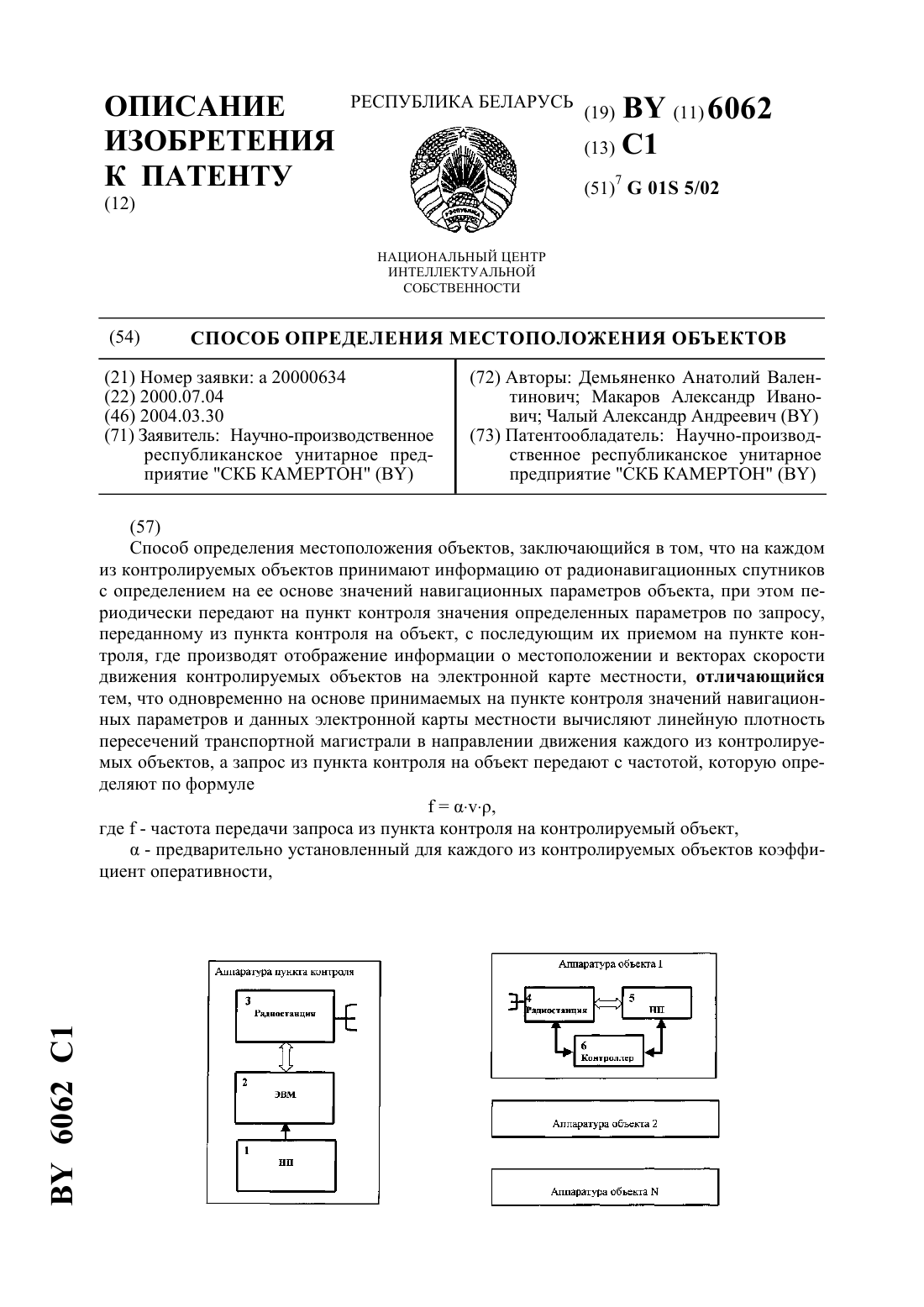
...каждого из объектов, характеризуемой коэффициентом оперативности. Это означает, что не каждый из контролируемых объектов следует опрашивать одинаково часто. Если местоположение некоторых объектов необходимо знать менее точно по сравнению с каким-то более важным объектом, то их и следует реже опрашивать. Следующим шагом является учет возможной смены маршрута, характеризуемый линейной плотностью перекрестков по направлению движения...
Рентгеновские средства для определения местоположения и лучевой терапии злокачественных новообразований
Номер патента: 7497
Опубликовано: 30.12.2005
Авторы: КУМАХОВ, Мурадин Абубекирович
МПК: A61B 6/00, G01N 23/04, A61N 5/10...
Метки: местоположения, определения, рентгеновские, лучевой, терапии, новообразований, злокачественных, средства
Текст:
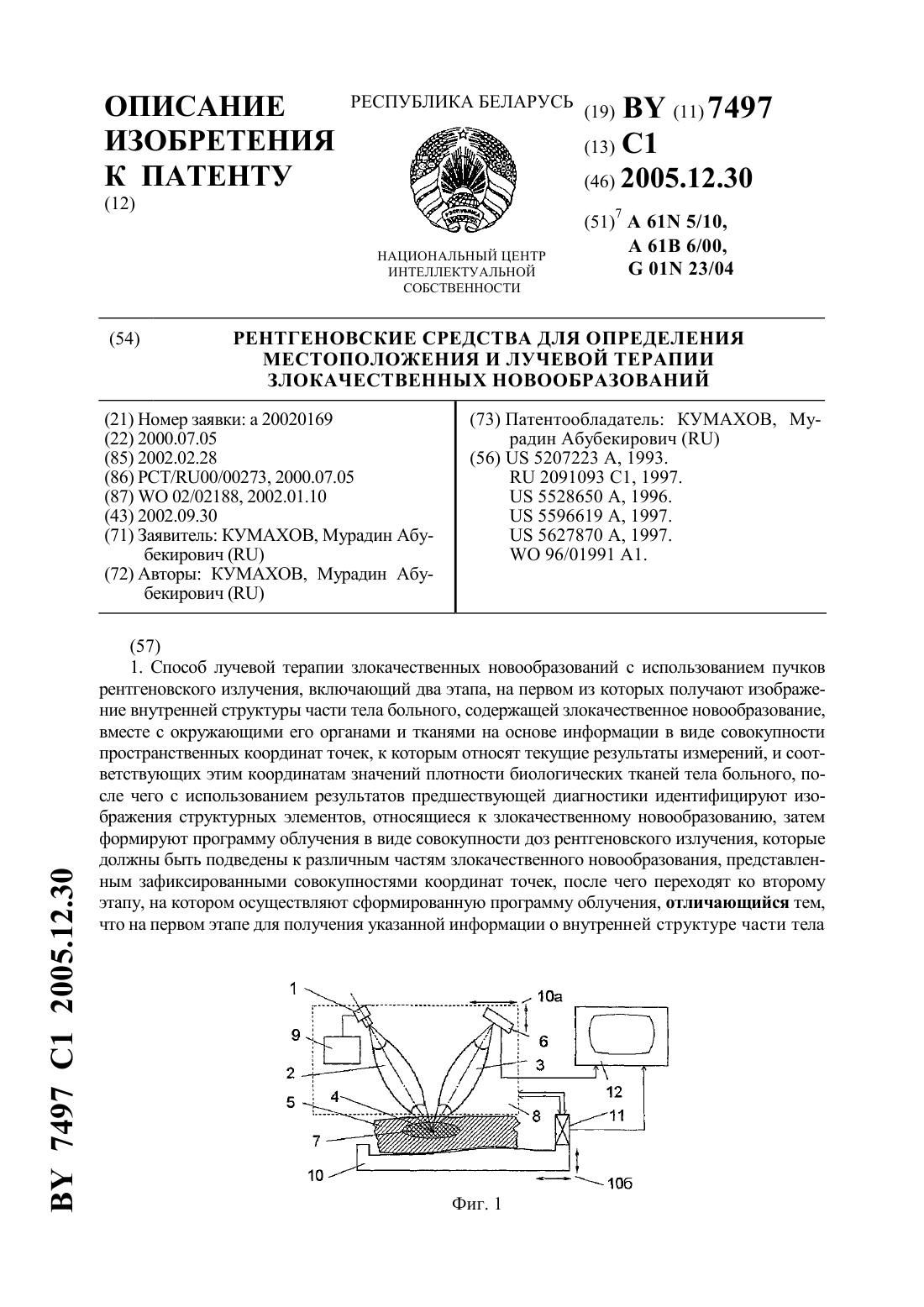
...вторичного излучения, получаемых с помощью одного или нескольких детекторов и определяемых одновременно с координатами точки зоны концентрации рентгеновского излучения, к которой относят текущие результаты измерений, судят о плотности биологических тканей в этой точке. Количественные показатели, принимаемые в качестве значений плотности биологических тканей, вместе с соответствующими им значениями координат используют для построения...
Способ определения дальности объекта и устройство для его осуществления
Номер патента: 4739
Опубликовано: 30.12.2002
Автор: Коростик Константин Николаевич
МПК: G01C 3/08, G01S 17/10
Метки: дальности, осуществления, устройство, определения, способ, объекта
Текст:
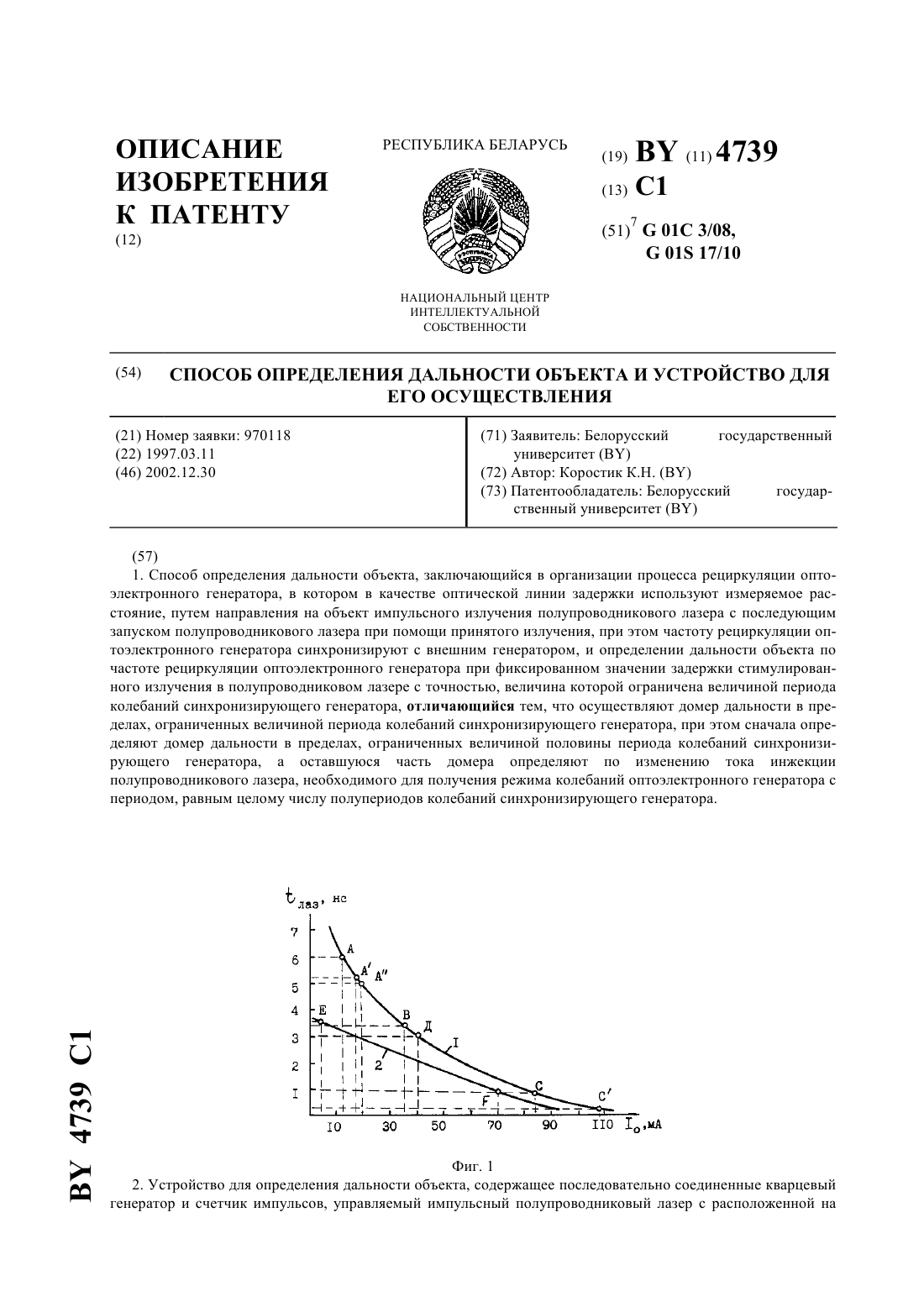
...Ткг), согласно кривой 1, для реализации заявляемого способа потребуется изменение тока постоянного смещения лазера 025 мА (см. точки А и В). При этом превышениетока накачки лазера над пороговым значением изменяется от(1,1 ст) /ст 1,2 лишь до(1,1 ст) /ст 1,4. В спосоп п п п бе-прототипе 072 мА (см. точки А и С), а значениев точке С достигает значения 1,9. При этом следует иметь в виду, что в начальной точке А 1,2 выбрано значительно ниже...
Устройство определения углового положения вращающегося объекта
Номер патента: 3712
Опубликовано: 30.12.2000
Авторы: Ярмолович Вячеслав Алексеевич, Анищик Виктор Михайлович
МПК: G01B 7/30
Метки: углового, положения, вращающегося, определения, объекта, устройство
Текст:
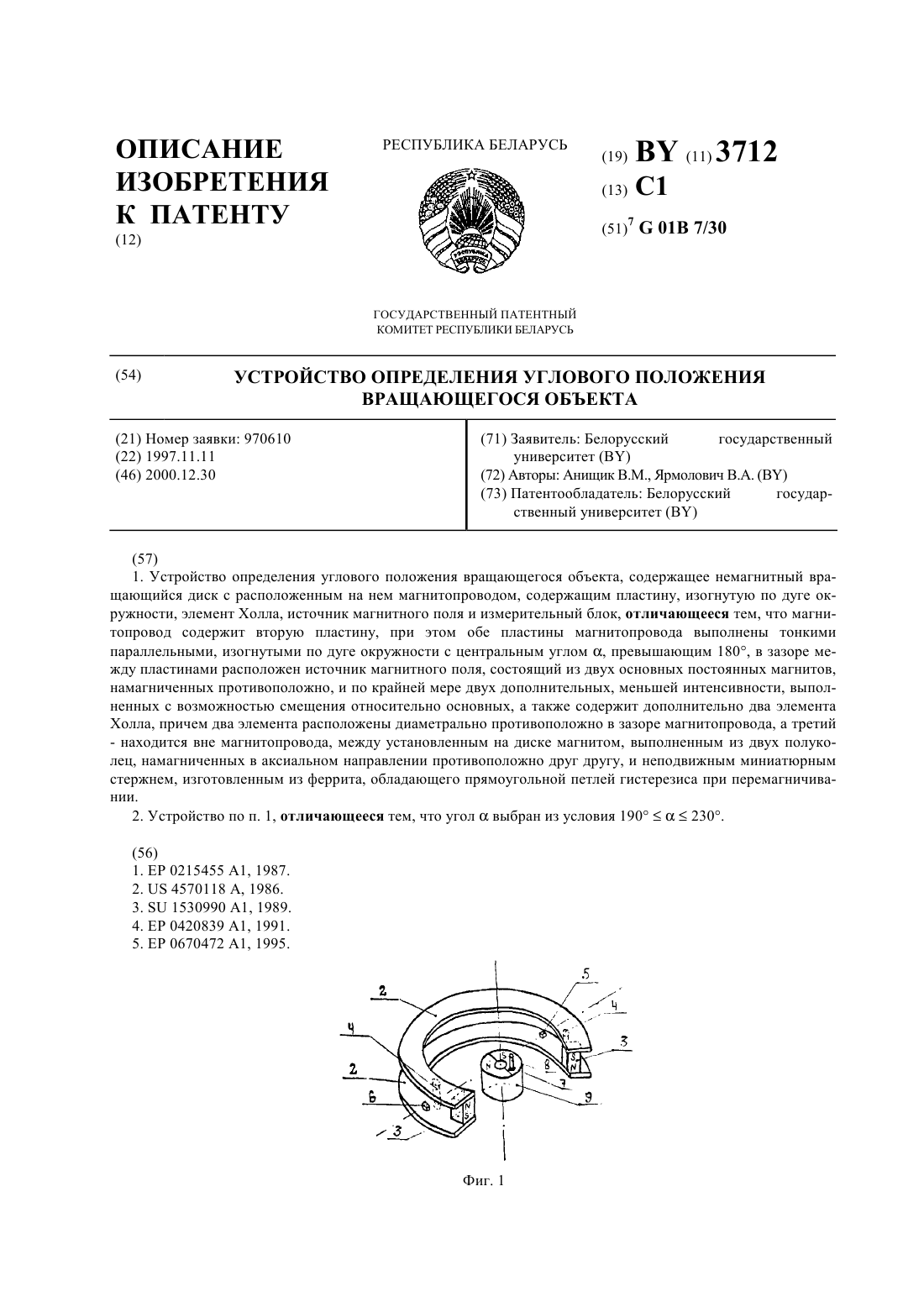
...источников магнитного поля в магнитопроводе, обеспечивающее строго линейную зависимость выходного сигнала от угла поворота в диапазоне углов более 180 при многооборотном вращении независимо от идентичности и симметричности постоянных магнитов. При этом выходной сигнал не зависит от аксиальных смещений вращающегося диска. Новым является использование трех элементов Холла, находящихся в функциональной связи с источниками магнитного...
Способ измерения скорости движения объекта и устройство для его осуществления
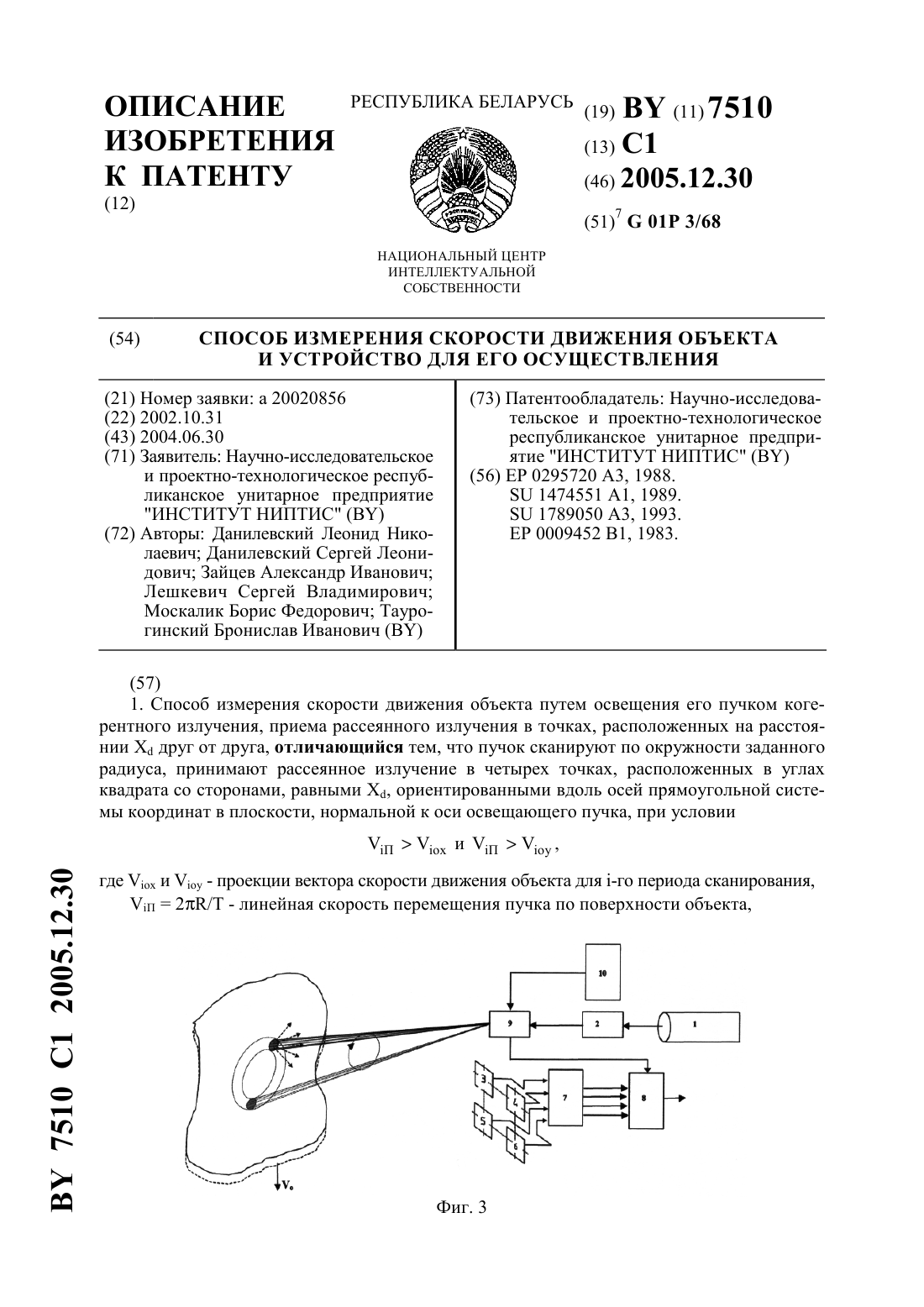
Номер патента: 7510
Опубликовано: 30.12.2005
Авторы: Данилевский Сергей Леонидович, Лешкевич Сергей Владимирович, Зайцев Александр Иванович, Таурогинский Бронислав Иванович, Данилевский Леонид Николаевич, Москалик Борис Федорович
МПК: G01P 3/68
Метки: способ, измерения, осуществления, устройство, объекта, движения, скорости
Текст:
...сигнальный процессор, блок обработки аналоговых сигналов, выходы которого соединены с информационными входами процессора, дополнительно содержит два приемника, задающий генератор и блок отклонения пучка, входы которого соединены с выходами упомянутого генератора, а выходы с входами синхронизации сигнального процессора, причем приемники расположены в углах квадрата со сторонами, равными , ориентированными вдоль осей прямоугольной системы...
Предыдущий патент: Стабилизатор термоокислительной деструкции полиэтилена
Следующий патент: Машина для резки кровельного покрытия
Случайный патент: Способ получения фунгицидной добавки