Автоматический захват для штучных грузов
Номер патента: 12415
Опубликовано: 30.10.2009
Авторы: Агейчик Юрий Валерьевич, Агейчик Валерий Александрович, Шило Иван Николаевич
Текст
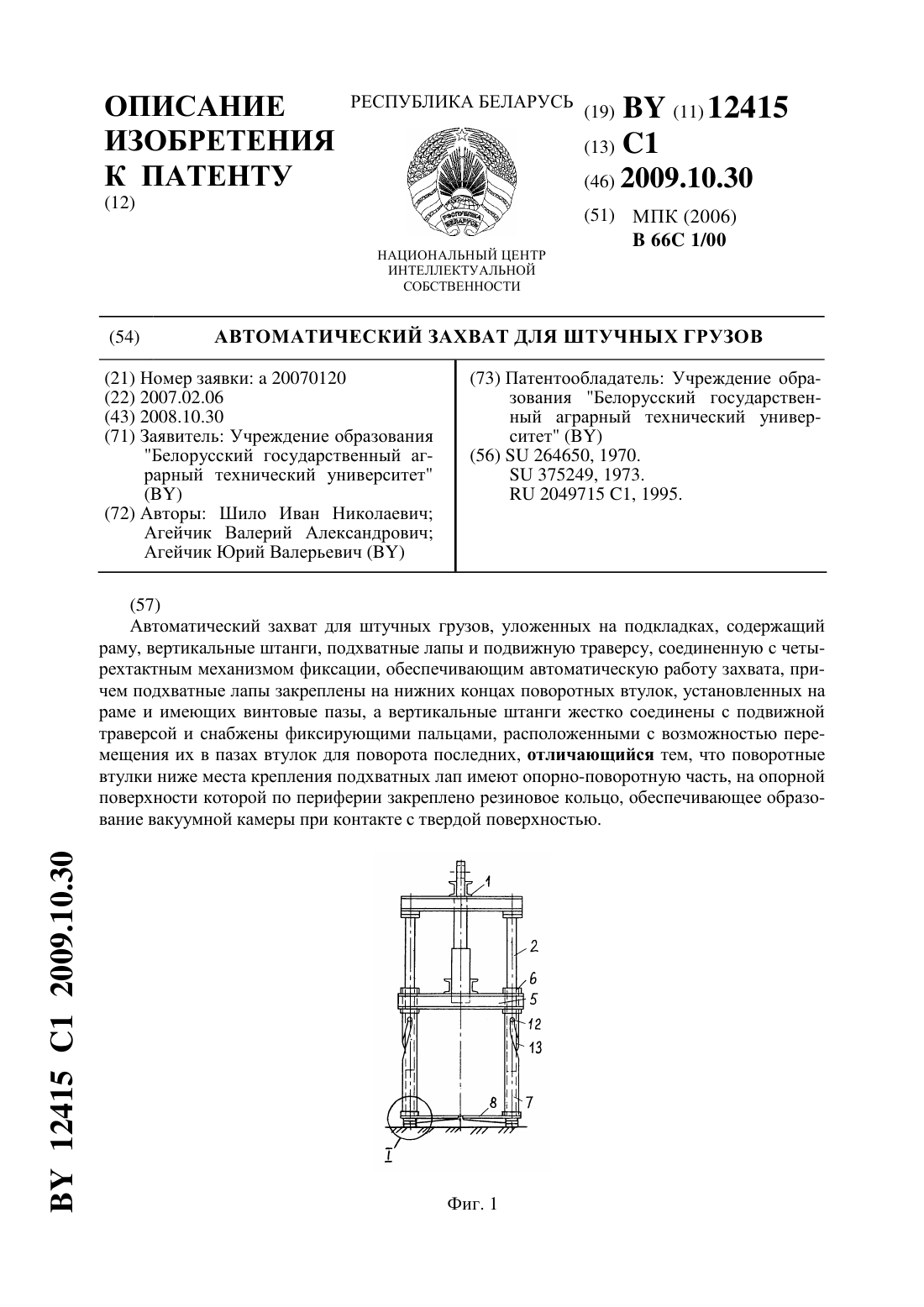
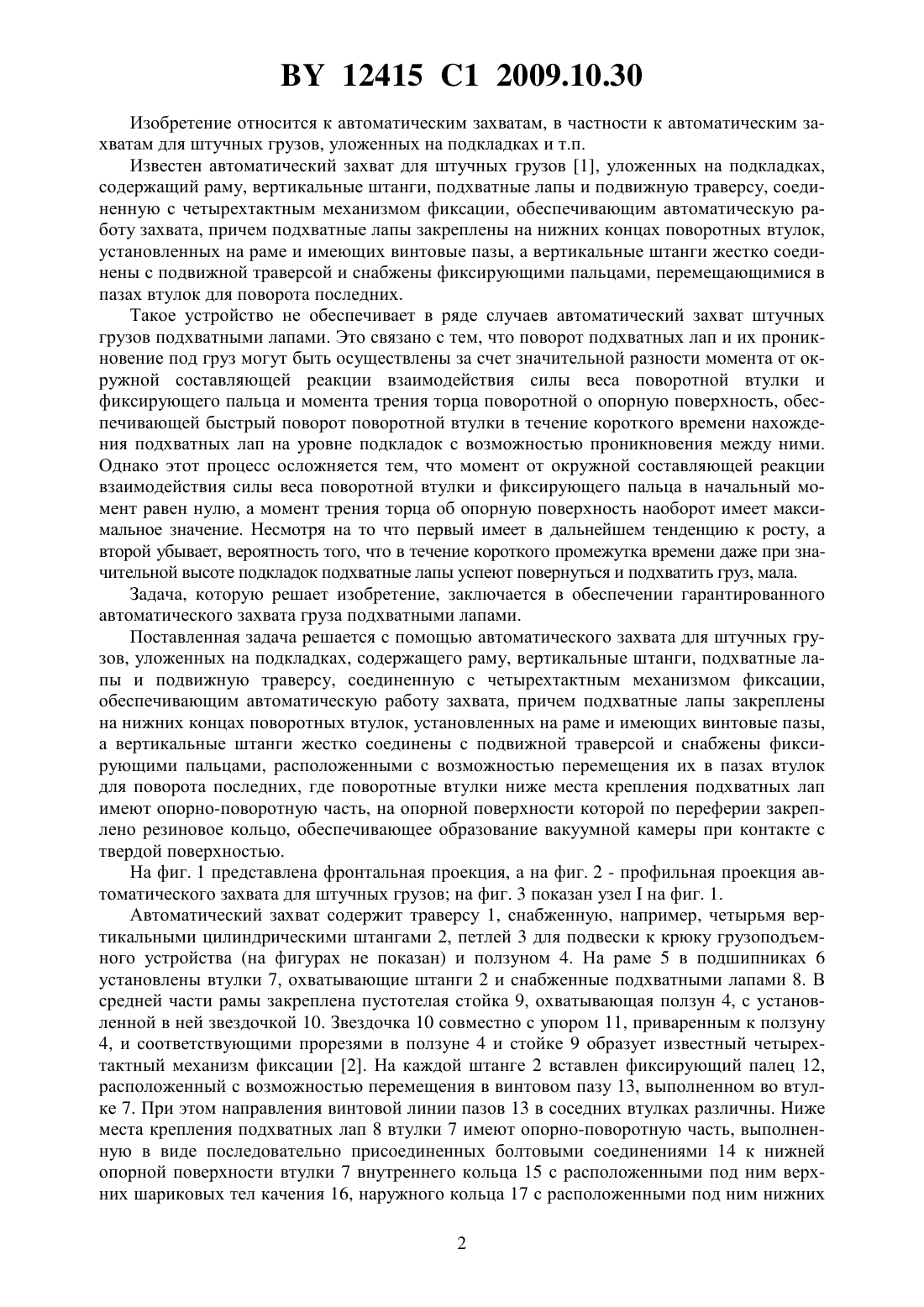
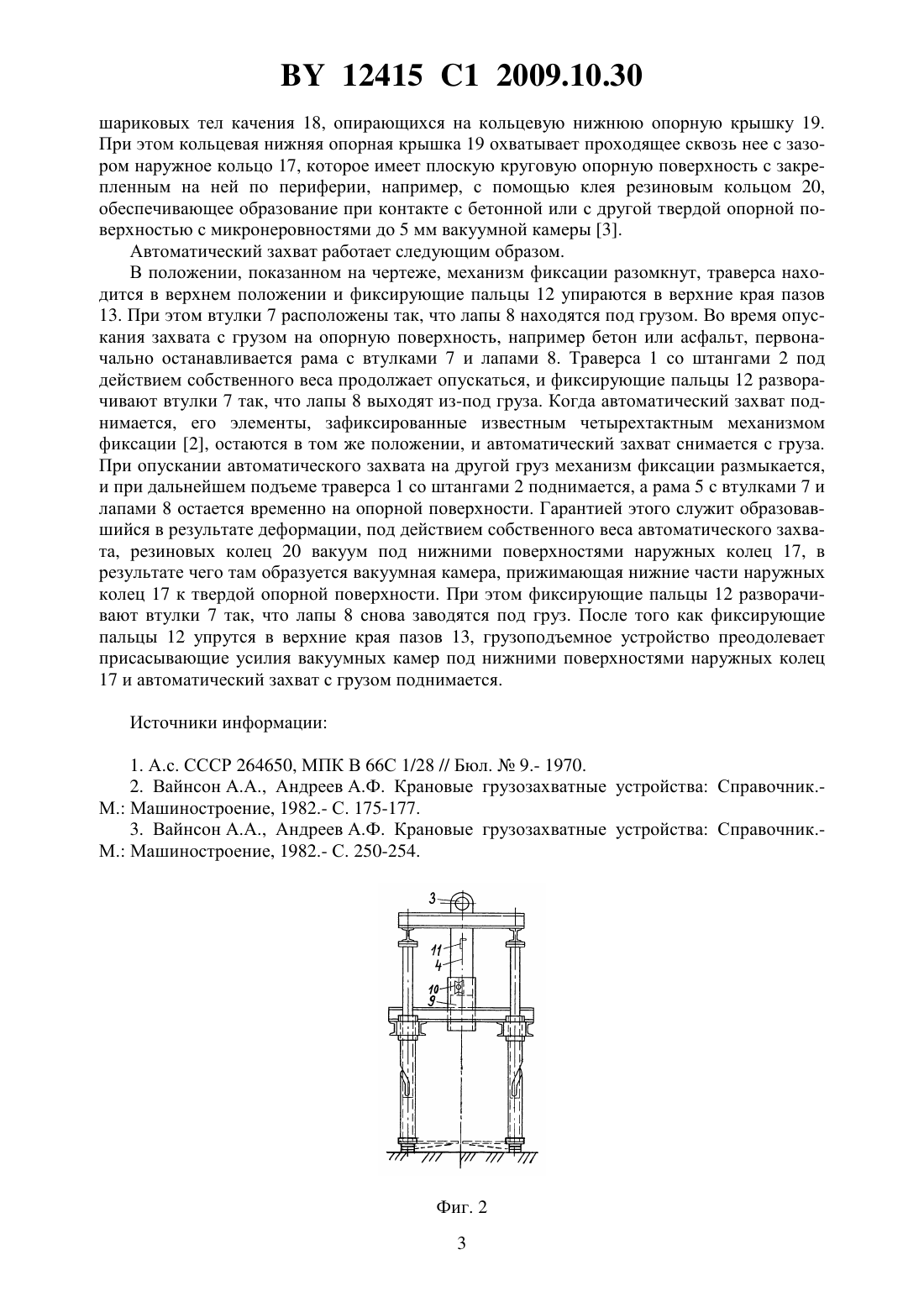
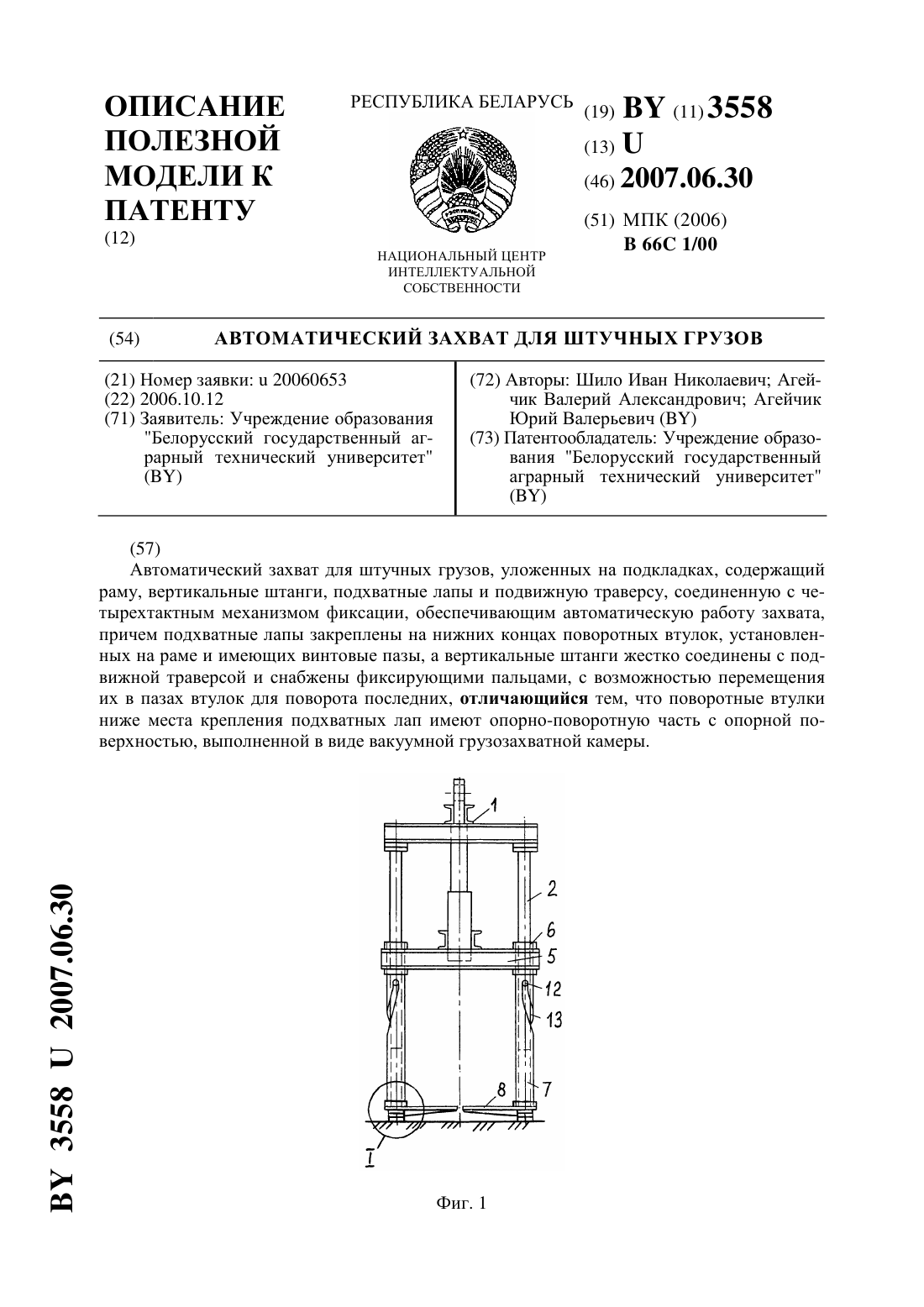
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ(71) Заявитель Учреждение образования Белорусский государственный аграрный технический университет(72) Авторы Шило Иван Николаевич Агейчик Валерий Александрович Агейчик Юрий Валерьевич(73) Патентообладатель Учреждение образования Белорусский государственный аграрный технический университет(57) Автоматический захват для штучных грузов, уложенных на подкладках, содержащий раму, вертикальные штанги, подхватные лапы и подвижную траверсу, соединенную с четырехтактным механизмом фиксации, обеспечивающим автоматическую работу захвата, причем подхватные лапы закреплены на нижних концах поворотных втулок, установленных на раме и имеющих винтовые пазы, а вертикальные штанги жестко соединены с подвижной траверсой и снабжены фиксирующими пальцами, расположенными с возможностью перемещения их в пазах втулок для поворота последних, отличающийся тем, что поворотные втулки ниже места крепления подхватных лап имеют опорно-поворотную часть, на опорной поверхности которой по периферии закреплено резиновое кольцо, обеспечивающее образование вакуумной камеры при контакте с твердой поверхностью. 12415 1 2009.10.30 Изобретение относится к автоматическим захватам, в частности к автоматическим захватам для штучных грузов, уложенных на подкладках и т.п. Известен автоматический захват для штучных грузов 1, уложенных на подкладках,содержащий раму, вертикальные штанги, подхватные лапы и подвижную траверсу, соединенную с четырехтактным механизмом фиксации, обеспечивающим автоматическую работу захвата, причем подхватные лапы закреплены на нижних концах поворотных втулок,установленных на раме и имеющих винтовые пазы, а вертикальные штанги жестко соединены с подвижной траверсой и снабжены фиксирующими пальцами, перемещающимися в пазах втулок для поворота последних. Такое устройство не обеспечивает в ряде случаев автоматический захват штучных грузов подхватными лапами. Это связано с тем, что поворот подхватных лап и их проникновение под груз могут быть осуществлены за счет значительной разности момента от окружной составляющей реакции взаимодействия силы веса поворотной втулки и фиксирующего пальца и момента трения торца поворотной о опорную поверхность, обеспечивающей быстрый поворот поворотной втулки в течение короткого времени нахождения подхватных лап на уровне подкладок с возможностью проникновения между ними. Однако этот процесс осложняется тем, что момент от окружной составляющей реакции взаимодействия силы веса поворотной втулки и фиксирующего пальца в начальный момент равен нулю, а момент трения торца об опорную поверхность наоборот имеет максимальное значение. Несмотря на то что первый имеет в дальнейшем тенденцию к росту, а второй убывает, вероятность того, что в течение короткого промежутка времени даже при значительной высоте подкладок подхватные лапы успеют повернуться и подхватить груз, мала. Задача, которую решает изобретение, заключается в обеспечении гарантированного автоматического захвата груза подхватными лапами. Поставленная задача решается с помощью автоматического захвата для штучных грузов, уложенных на подкладках, содержащего раму, вертикальные штанги, подхватные лапы и подвижную траверсу, соединенную с четырехтактным механизмом фиксации,обеспечивающим автоматическую работу захвата, причем подхватные лапы закреплены на нижних концах поворотных втулок, установленных на раме и имеющих винтовые пазы,а вертикальные штанги жестко соединены с подвижной траверсой и снабжены фиксирующими пальцами, расположенными с возможностью перемещения их в пазах втулок для поворота последних, где поворотные втулки ниже места крепления подхватных лап имеют опорно-поворотную часть, на опорной поверхности которой по переферии закреплено резиновое кольцо, обеспечивающее образование вакуумной камеры при контакте с твердой поверхностью. На фиг. 1 представлена фронтальная проекция, а на фиг. 2 - профильная проекция автоматического захвата для штучных грузов на фиг. 3 показан узелна фиг. 1. Автоматический захват содержит траверсу 1, снабженную, например, четырьмя вертикальными цилиндрическими штангами 2, петлей 3 для подвески к крюку грузоподъемного устройства (на фигурах не показан) и ползуном 4. На раме 5 в подшипниках 6 установлены втулки 7, охватывающие штанги 2 и снабженные подхватными лапами 8. В средней части рамы закреплена пустотелая стойка 9, охватывающая ползун 4, с установленной в ней звездочкой 10. Звездочка 10 совместно с упором 11, приваренным к ползуну 4, и соответствующими прорезями в ползуне 4 и стойке 9 образует известный четырехтактный механизм фиксации 2. На каждой штанге 2 вставлен фиксирующий палец 12,расположенный с возможностью перемещения в винтовом пазу 13, выполненном во втулке 7. При этом направления винтовой линии пазов 13 в соседних втулках различны. Ниже местакрепления подхватных лап 8 втулки 7 имеют опорно-поворотную часть, выполненную в виде последовательно присоединенных болтовыми соединениями 14 к нижней опорной поверхности втулки 7 внутреннего кольца 15 с расположенными под ним верхних шариковых тел качения 16, наружного кольца 17 с расположенными под ним нижних 2 12415 1 2009.10.30 шариковых тел качения 18, опирающихся на кольцевую нижнюю опорную крышку 19. При этом кольцевая нижняя опорная крышка 19 охватывает проходящее сквозь нее с зазором наружное кольцо 17, которое имеет плоскую круговую опорную поверхность с закрепленным на ней по периферии, например, с помощью клея резиновым кольцом 20,обеспечивающее образование при контакте с бетонной или с другой твердой опорной поверхностью с микронеровностями до 5 мм вакуумной камеры 3. Автоматический захват работает следующим образом. В положении, показанном на чертеже, механизм фиксации разомкнут, траверса находится в верхнем положении и фиксирующие пальцы 12 упираются в верхние края пазов 13. При этом втулки 7 расположены так, что лапы 8 находятся под грузом. Во время опускания захвата с грузом на опорную поверхность, например бетон или асфальт, первоначально останавливается рама с втулками 7 и лапами 8. Траверса 1 со штангами 2 под действием собственного веса продолжает опускаться, и фиксирующие пальцы 12 разворачивают втулки 7 так, что лапы 8 выходят из-под груза. Когда автоматический захват поднимается, его элементы, зафиксированные известным четырехтактным механизмом фиксации 2, остаются в том же положении, и автоматический захват снимается с груза. При опускании автоматического захвата на другой груз механизм фиксации размыкается,и при дальнейшем подъеме траверса 1 со штангами 2 поднимается, а рама 5 с втулками 7 и лапами 8 остается временно на опорной поверхности. Гарантией этого служит образовавшийся в результате деформации, под действием собственного веса автоматического захвата, резиновых колец 20 вакуум под нижними поверхностями наружных колец 17, в результате чего там образуется вакуумная камера, прижимающая нижние части наружных колец 17 к твердой опорной поверхности. При этом фиксирующие пальцы 12 разворачивают втулки 7 так, что лапы 8 снова заводятся под груз. После того как фиксирующие пальцы 12 упрутся в верхние края пазов 13, грузоподъемное устройство преодолевает присасывающие усилия вакуумных камер под нижними поверхностями наружных колец 17 и автоматический захват с грузом поднимается. Источники информации 1. А.с. СССР 264650, МПК В 66 С 1/28 // Бюл.9.- 1970. 2. Вайнсон А.А., Андреев А.Ф. Крановые грузозахватные устройства Справочник.М. Машиностроение, 1982.- С. 175-177. 3. Вайнсон А.А., Андреев А.Ф. Крановые грузозахватные устройства Справочник.М. Машиностроение, 1982.- С. 250-254. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: B66C 1/00
Метки: захват, автоматический, грузов, штучных
Код ссылки
<a href="https://by.patents.su/4-12415-avtomaticheskijj-zahvat-dlya-shtuchnyh-gruzov.html" rel="bookmark" title="База патентов Беларуси">Автоматический захват для штучных грузов</a>
Автоматический захват для штучных грузов
Номер патента: U 3558
Опубликовано: 30.06.2007
Авторы: Шило Иван Николаевич, Агейчик Валерий Александрович, Агейчик Юрий Валерьевич
МПК: B66C 1/00
Метки: захват, грузов, автоматический, штучных
Текст:
...автоматическую работу захвата, причем подхватные лапы закреплены на нижних концах поворотных втулок, установленных на раме и имеющих винтовые пазы, а вертикальные штанги жестко соединены с подвижной траверсой и снабжены фиксирующими пальцами, с возможностью перемещения их в пазах втулок для поворота последних, где поворотные втулки ниже места крепления подхватных лап имеют опорно-поворотную часть с опорной поверхностью,...
Захватное устройство для штучных грузов
Номер патента: U 3607
Опубликовано: 30.06.2007
Авторы: Агейчик Валерий Александрович, Шило Иван Николаевич, Агейчик Юрий Валерьевич
МПК: B66C 1/10
Метки: штучных, грузов, устройство, захватное
Текст:
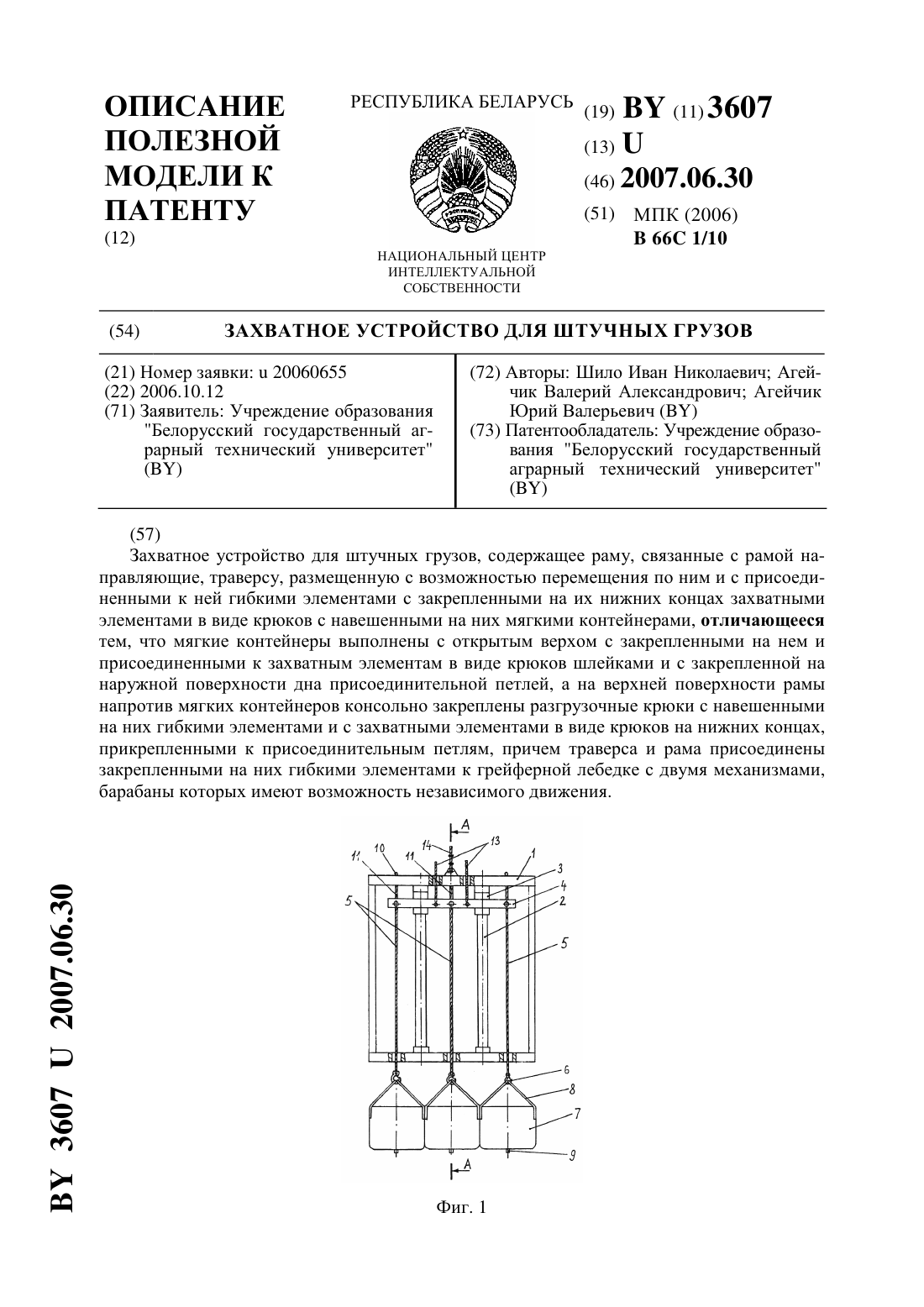
...затрат. Поставленная задача решается с помощью захватного устройства для штучных грузов,содержащего раму, связанные с рамой направляющие, траверсу, размещенную с возможностью перемещения по ним и с присоединенными к ней гибкими элементами с закрепленными на их нижних концах захватными элементами в виде крюков с навешенными на них мягкими контейнерами, где мягкие контейнеры выполнены с открытым верхом с закрепленными на нем и...
Устройство для перемещения по вертикальным поверхностям, содержащее вакуумный захват, и вакуумный захват

Номер патента: U 5235
Опубликовано: 30.04.2009
Автор: Михальчук Андрей Николаевич
МПК: B25J 15/06, B62D 57/00
Метки: устройство, вакуумный, перемещения, содержащее, поверхностям, вертикальным, захват
Текст:
...вид сбоку фиг. 5 - вид Б на фиг. 4 фиг. 6 - продольный разрез рабочего колеса фиг. 7-9 - схемы движения воздуха при функционировании вакуумного захвата фиг. 10 - схема формирования стенки вихря фиг. 11 - схема сил, действующих на вакуумный захват фиг. 12 - вид сбоку устройства для перемещения по вертикальным поверхностям фиг. 13 - вид В на фиг. 12 фиг. 14 - схема сил, действующих на устройство для перемещения по вертикальным поверхностям....
Захват крепления системы для эвакуации пострадавших из многоэтажных зданий

Номер патента: U 4708
Опубликовано: 30.10.2008
Авторы: Дмитриченко Геннадий Степанович, Кондратович Александр Андреевич, Рудь Алексей Иванович
МПК: A62B 1/00
Метки: зданий, многоэтажных, системы, крепления, захват, эвакуации, пострадавших
Текст:
...нахождение откидных лап-когтей в неопределенном положении, в том числе и в сложенном положении, что приведет к отклонению траектории полета захвата от расчетной, а также к возможному проскальзыванию их по элементам здания при натягивании веревки и как следствие к неудачной попытке осуществить закрепление системы для спасения пострадавших из многоэтажных зданий. Конструкция захвата крепления системы для эвакуации пострадавших из многоэтажных...
Захват для крепления резинотросовых лент и канатов при испытаниях на разрывной гидравлической машине
Номер патента: 8102
Опубликовано: 30.06.2006
Авторы: Щерба Татьяна Павловна, Дворник Александр Петрович, Белько Сергей Леонидович, Барановский Анатолий Леонидович, Прушак Нина Владимировна, Конопляник Алла Владимировна
МПК: G01N 3/04
Метки: резинотросовых, разрывной, машине, крепления, захват, испытаниях, канатов, лент, гидравлической
Текст:
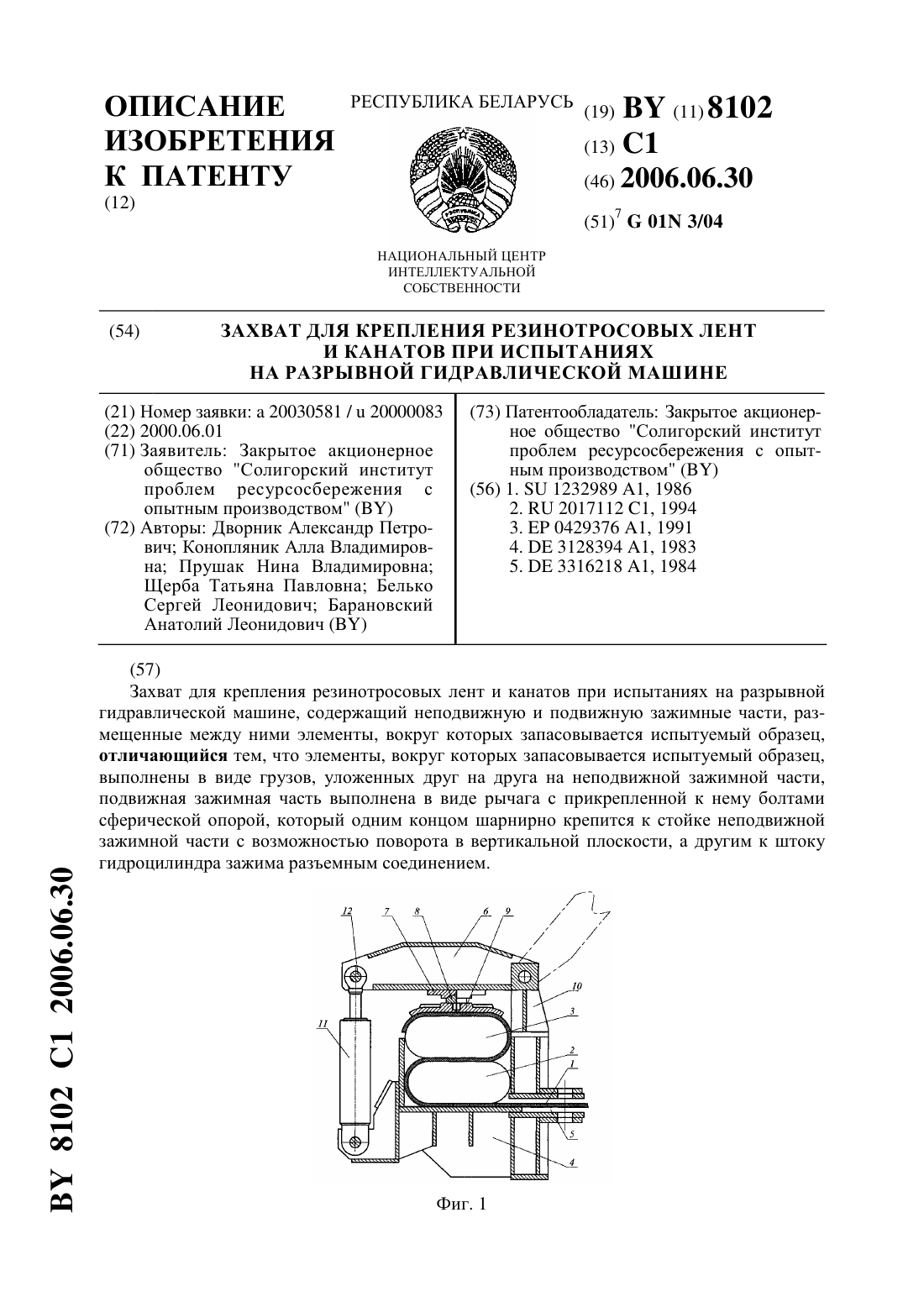
...и канатов при испытаниях на разрывной гидравлической машине, содержащий неподвижную и подвижную зажимные части, размещенные между ними элементы, выполненные в виде грузов, уложенных друг на друга на неподвижной зажимной части, и вокруг которых запасовывается испытуемый образец, причем подвижная зажимная часть выполнена в виде рычага с прикрепленной к нему болтами сферической опорой, который одним концом шарнирно крепится к стойке...
Предыдущий патент: Способ засева клюквой антропогенно нарушенного верхового или переходного болота или выработанного торфяного месторождения
Следующий патент: Способ лечения гнойно-некротического поражения пальцев у крупного рогатого скота
Случайный патент: Четырехпроводная цифровая система передачи