Способ измерения профиля земной поверхности
Текст
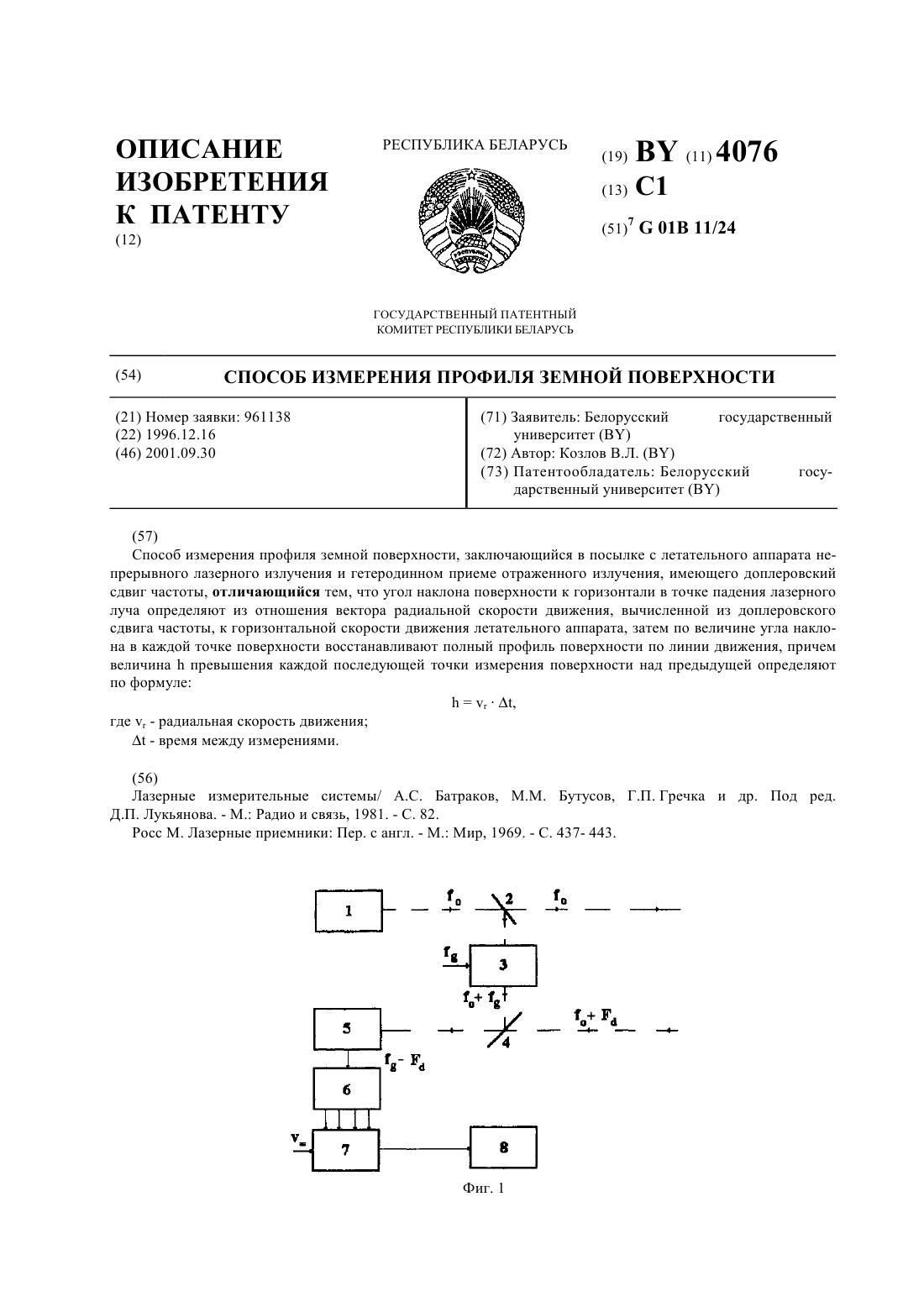
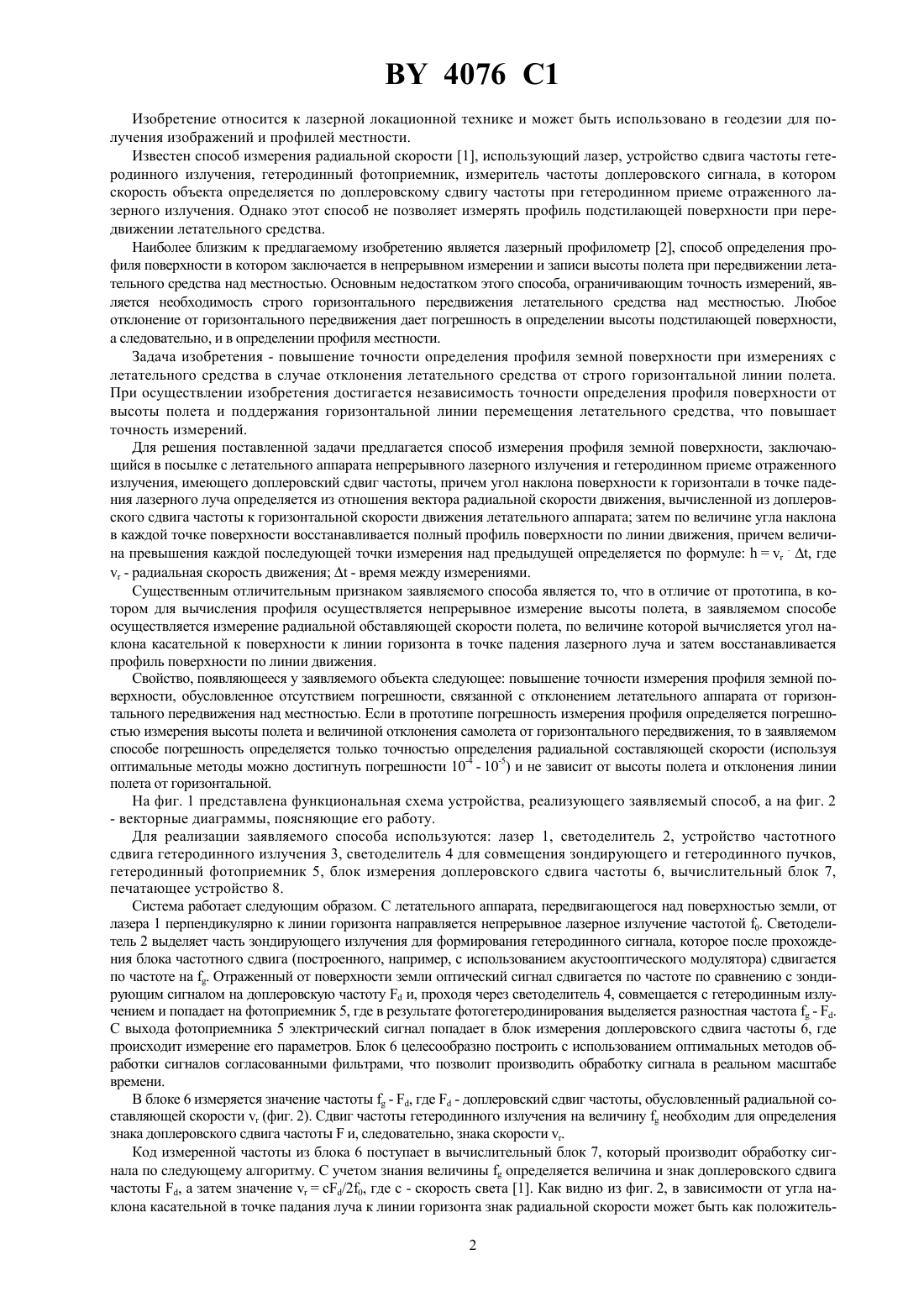
ГОСУДАРСТВЕННЫЙ ПАТЕНТНЫЙ КОМИТЕТ РЕСПУБЛИКИ БЕЛАРУСЬ СПОСОБ ИЗМЕРЕНИЯ ПРОФИЛЯ ЗЕМНОЙ ПОВЕРХНОСТИ(71) Заявитель Белорусский государственный университет(73) Патентообладатель Белорусский государственный университет(57) Способ измерения профиля земной поверхности, заключающийся в посылке с летательного аппарата непрерывного лазерного излучения и гетеродинном приеме отраженного излучения, имеющего доплеровский сдвиг частоты, отличающийся тем, что угол наклона поверхности к горизонтали в точке падения лазерного луча определяют из отношения вектора радиальной скорости движения, вычисленной из доплеровского сдвига частоты, к горизонтальной скорости движения летательного аппарата, затем по величине угла наклона в каждой точке поверхности восстанавливают полный профиль поверхности по линии движения, причем величинапревышения каждой последующей точки измерения поверхности над предыдущей определяют по формуле,где- радиальная скорость движения- время между измерениями. 4076 1 Изобретение относится к лазерной локационной технике и может быть использовано в геодезии для получения изображений и профилей местности. Известен способ измерения радиальной скорости 1, использующий лазер, устройство сдвига частоты гетеродинного излучения, гетеродинный фотоприемник, измеритель частоты доплеровского сигнала, в котором скорость объекта определяется по доплеровскому сдвигу частоты при гетеродинном приеме отраженного лазерного излучения. Однако этот способ не позволяет измерять профиль подстилающей поверхности при передвижении летательного средства. Наиболее близким к предлагаемому изобретению является лазерный профилометр 2, способ определения профиля поверхности в котором заключается в непрерывном измерении и записи высоты полета при передвижении летательного средства над местностью. Основным недостатком этого способа, ограничивающим точность измерений, является необходимость строго горизонтального передвижения летательного средства над местностью. Любое отклонение от горизонтального передвижения дает погрешность в определении высоты подстилающей поверхности,а следовательно, и в определении профиля местности. Задача изобретения - повышение точности определения профиля земной поверхности при измерениях с летательного средства в случае отклонения летательного средства от строго горизонтальной линии полета. При осуществлении изобретения достигается независимость точности определения профиля поверхности от высоты полета и поддержания горизонтальной линии перемещения летательного средства, что повышает точность измерений. Для решения поставленной задачи предлагается способ измерения профиля земной поверхности, заключающийся в посылке с летательного аппарата непрерывного лазерного излучения и гетеродинном приеме отраженного излучения, имеющего доплеровский сдвиг частоты, причем угол наклона поверхности к горизонтали в точке падения лазерного луча определяется из отношения вектора радиальной скорости движения, вычисленной из доплеровского сдвига частоты к горизонтальной скорости движения летательного аппарата затем по величине угла наклона в каждой точке поверхности восстанавливается полный профиль поверхности по линии движения, причем величина превышения каждой последующей точки измерения над предыдущей определяется по формуле. , где- радиальная скорость движения- время между измерениями. Существенным отличительным признаком заявляемого способа является то, что в отличие от прототипа, в котором для вычисления профиля осуществляется непрерывное измерение высоты полета, в заявляемом способе осуществляется измерение радиальной обставляющей скорости полета, по величине которой вычисляется угол наклона касательной к поверхности к линии горизонта в точке падения лазерного луча и затем восстанавливается профиль поверхности по линии движения. Свойство, появляющееся у заявляемого объекта следующее повышение точности измерения профиля земной поверхности, обусловленное отсутствием погрешности, связанной с отклонением летательного аппарата от горизонтального передвижения над местностью. Если в прототипе погрешность измерения профиля определяется погрешностью измерения высоты полета и величиной отклонения самолета от горизонтального передвижения, то в заявляемом способе погрешность определяется только точностью определения радиальной составляющей скорости (используя оптимальные методы можно достигнуть погрешности 10-4 - 10-5) и не зависит от высоты полета и отклонения линии полета от горизонтальной. На фиг. 1 представлена функциональная схема устройства, реализующего заявляемый способ, а на фиг. 2- векторные диаграммы, поясняющие его работу. Для реализации заявляемого способа используются лазер 1, светоделитель 2, устройство частотного сдвига гетеродинного излучения 3, светоделитель 4 для совмещения зондирующего и гетеродинного пучков,гетеродинный фотоприемник 5, блок измерения доплеровского сдвига частоты 6, вычислительный блок 7,печатающее устройство 8. Система работает следующим образом. С летательного аппарата, передвигающегося над поверхностью земли, от лазера 1 перпендикулярно к линии горизонта направляется непрерывное лазерное излучение частотой 0. Светоделитель 2 выделяет часть зондирующего излучения для формирования гетеродинного сигнала, которое после прохождения блока частотного сдвига (построенного, например, с использованием акустооптического модулятора) сдвигается по частоте на . Отраженный от поверхности земли оптический сигнал сдвигается по частоте по сравнению с зондирующим сигналом на доплеровскую частотуи, проходя через светоделитель 4, совмещается с гетеродинным излучением и попадает на фотоприемник 5, где в результате фотогетеродинирования выделяется разностная частота- . С выхода фотоприемника 5 электрический сигнал попадает в блок измерения доплеровского сдвига частоты 6, где происходит измерение его параметров. Блок 6 целесообразно построить с использованием оптимальных методов обработки сигналов согласованными фильтрами, что позволит производить обработку сигнала в реальном масштабе времени. В блоке 6 измеряется значение частоты- , где- доплеровский сдвиг частоты, обусловленный радиальной составляющей скорости(фиг. 2). Сдвиг частоты гетеродинного излучения на величинунеобходим для определения знака доплеровского сдвига частотыи, следовательно, знака скорости . Код измеренной частоты из блока 6 поступает в вычислительный блок 7, который производит обработку сигнала по следующему алгоритму. С учетом знания величиныопределяется величина и знак доплеровского сдвига частоты , а затем значениес/20, где с - скорость света 1. Как видно из фиг. 2, в зависимости от угла наклона касательной в точке падания луча к линии горизонта знак радиальной скорости может быть как положитель 2 4076 1 ный, так и отрицательный (т.С и т.А на фиг. 2). При нулевом значении(т.В фиг. 2) касательная к поверхности будет расположена горизонтально. В блок 7 также поступает значение горизонтальной скорости движения летательного аппарата , величина которой определяется любым из известных в авиации способов, например по доплеровскому сдвигу частоты излучения относительно встречных воздушных масс. Уголнаклона касательной в точке падения излучения определяется следующим образом (фиг. 2)(1)// ,где- превышение последующей точки измерения над предыдущей- расстояние по горизонтали между точками измерения- время между измерениями. Преобразовывая (1), получаем //, откуда(2). Таким образом, в блоке 7 по значению радиальной скоростипроисходит вычисление превышениякаждой последующей точки измерения над предыдущей, и затем, зная горизонтальную скорость передвижения летательного аппарата , вычисляется расстояние между точками измеренийи воспроизводится профиль земной поверхности вдоль линии передвижения, индицируемый печатающим устройством 8. Из алгоритма работы заявляемого объекта следует, что в расчетные соотношения не входит высота полета летательного аппарата, т.е. погрешность измерений не зависит от стабильности поддержания высоты полета, а определяется лишь разрешением по частоте блока измерения доплеровского сигнала. За счет этого по сравнению с прототипом достигается повышение точности измерения профиля земной поверхности. В прототипе погрешность определяется погрешностью измерения дальности (высоты) и погрешностью поддержания горизонтальной линии перемещения и составляет 1,52 м. В заявляемом объекте погрешность измерений определяется разрешением по частоте спектроанализатора и равняется 10-310-4 от максимального перепада высот за время между измерениями и при 1 мс в зависимости от скорости движения составит величину в единицы и десятки мм. При этом необходимо лишь обеспечить вертикальное направление оптического излучения к поверхности земли (как и в прототипе), что достаточно просто реализуется с помощью гироскопических методов. Источники информации 1. Росс М. Лазерные приемники. - М. Мир, 1969. - С. 437-443. 2. Лазерные измерительные системы / Под ред. Д.П. Лукьянова. - М. Радио и связь, 1981. - С. 82. Государственный патентный комитет Республики Беларусь. 220072, г. Минск, проспект Ф. Скорины, 66.
МПК / Метки
МПК: G01B 11/24
Метки: способ, земной, поверхности, профиля, измерения
Код ссылки
<a href="https://by.patents.su/3-4076-sposob-izmereniya-profilya-zemnojj-poverhnosti.html" rel="bookmark" title="База патентов Беларуси">Способ измерения профиля земной поверхности</a>
Устройство для измерения профиля колеса железнодорожного транспортного средства
Номер патента: 3156
Опубликовано: 30.12.1999
Авторы: Романов Александр Вячеславович, Фатыхов Вадим Нилович, Никифоров Борис Данилович
Метки: устройство, транспортного, средства, колеса, измерения, железнодорожного, профиля
Текст:
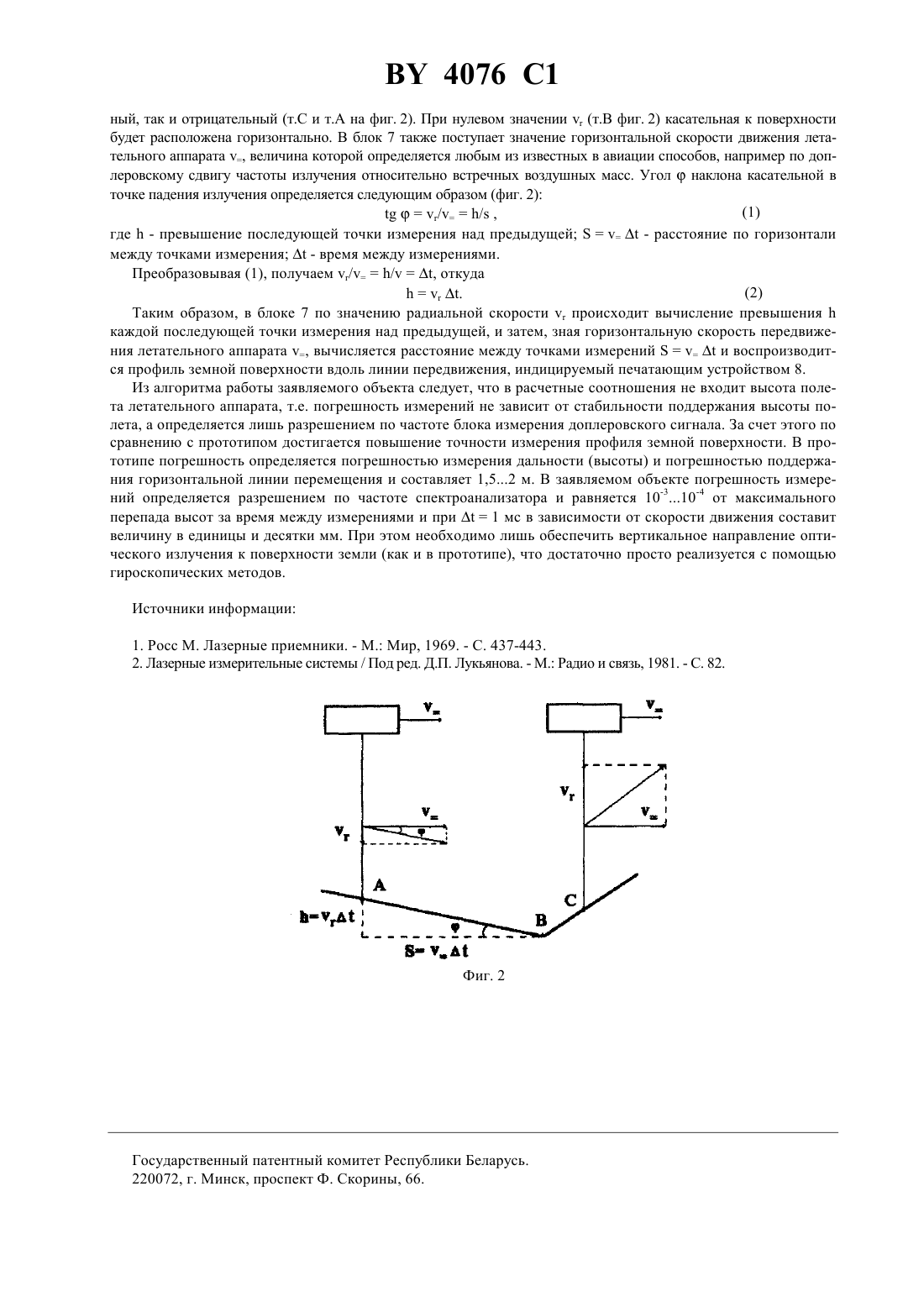
...- поворотная платформа, 5 - измерительный щуп, 6 - подвижный элемент двухкоординатного преобразователя перемещений, 7 - неподвижный элемент двухкоординатного преобразователя перемещений, 8 - вычислительный блок, 9 - индикатор, 10 - ось, 11 - пружина, 12 - фиксатор платформы, совмещенный с кнопкой Измерение, 13 - профиль колеса. На фиг. 2 приведена функциональная схема двухкоординатного преобразователя перемещений, где 14 - протяженный...
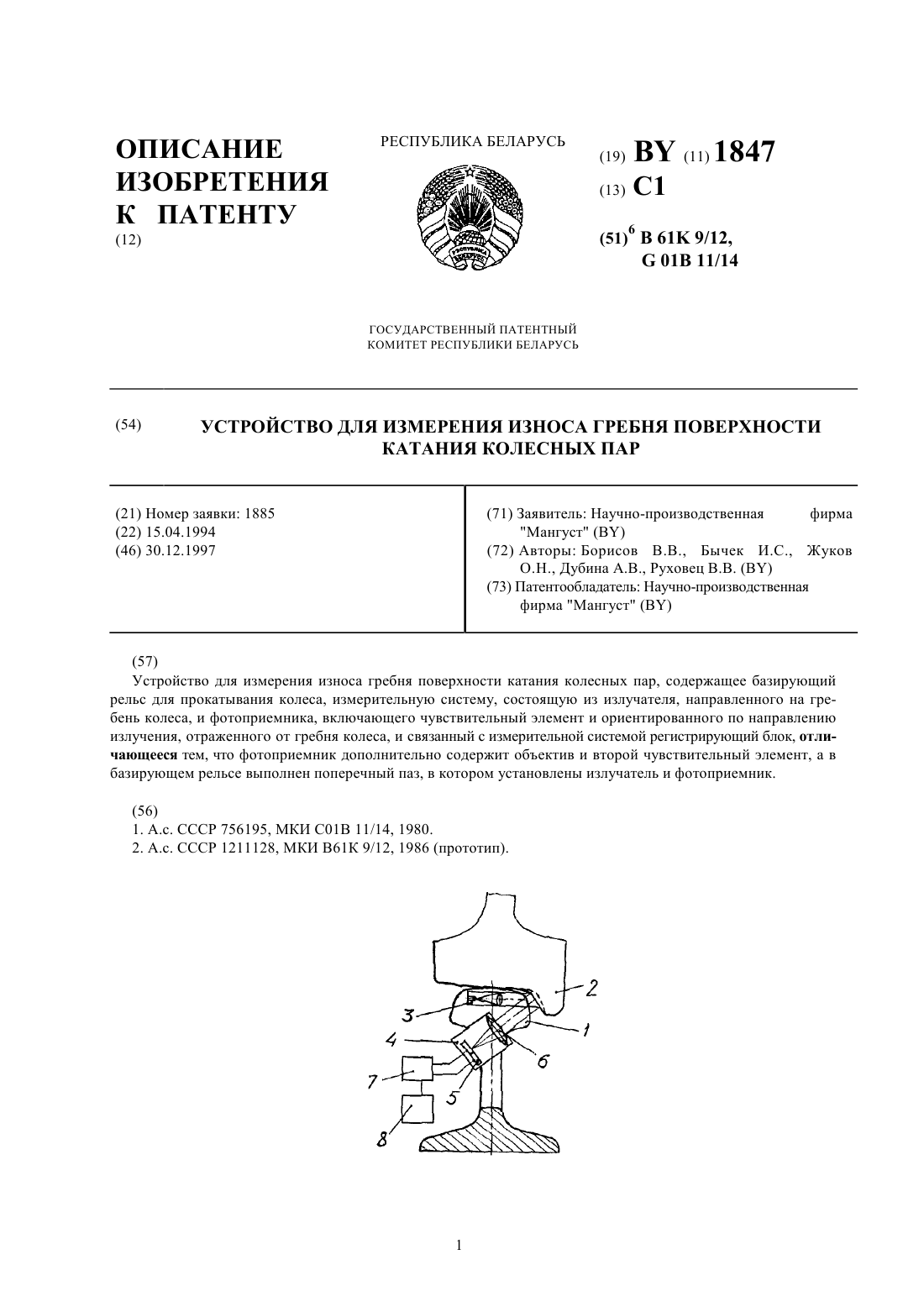
Устройство для измерения износа гребня поверхности катания колесных пар
Номер патента: 1847
Опубликовано: 30.12.1997
Авторы: Бычек Иван Степанович, Борисов Виктор Викторович, Жуков Олег Николаевич, Дубина Анатолий Владимирович, Руховец Владимир Васильевич
МПК: G01B 11/14, B61K 9/12
Метки: пар, колесных, гребня, поверхности, измерения, катания, устройство, износа
Текст:
...устройства является недостаточная точность измерения угла наклона изношенной поверхности гребня колеса, так как не учитывается поперечное смещение колесной пары относительно рельса и различия коэффициентов отражения поверхностей гребней контролируемых колес. Целью настоящего изобретения является повышение точности измерения угла подреза гребня контролируемых колес. Поставленная цель достигается тем, что в базирующем рельсе, которому...
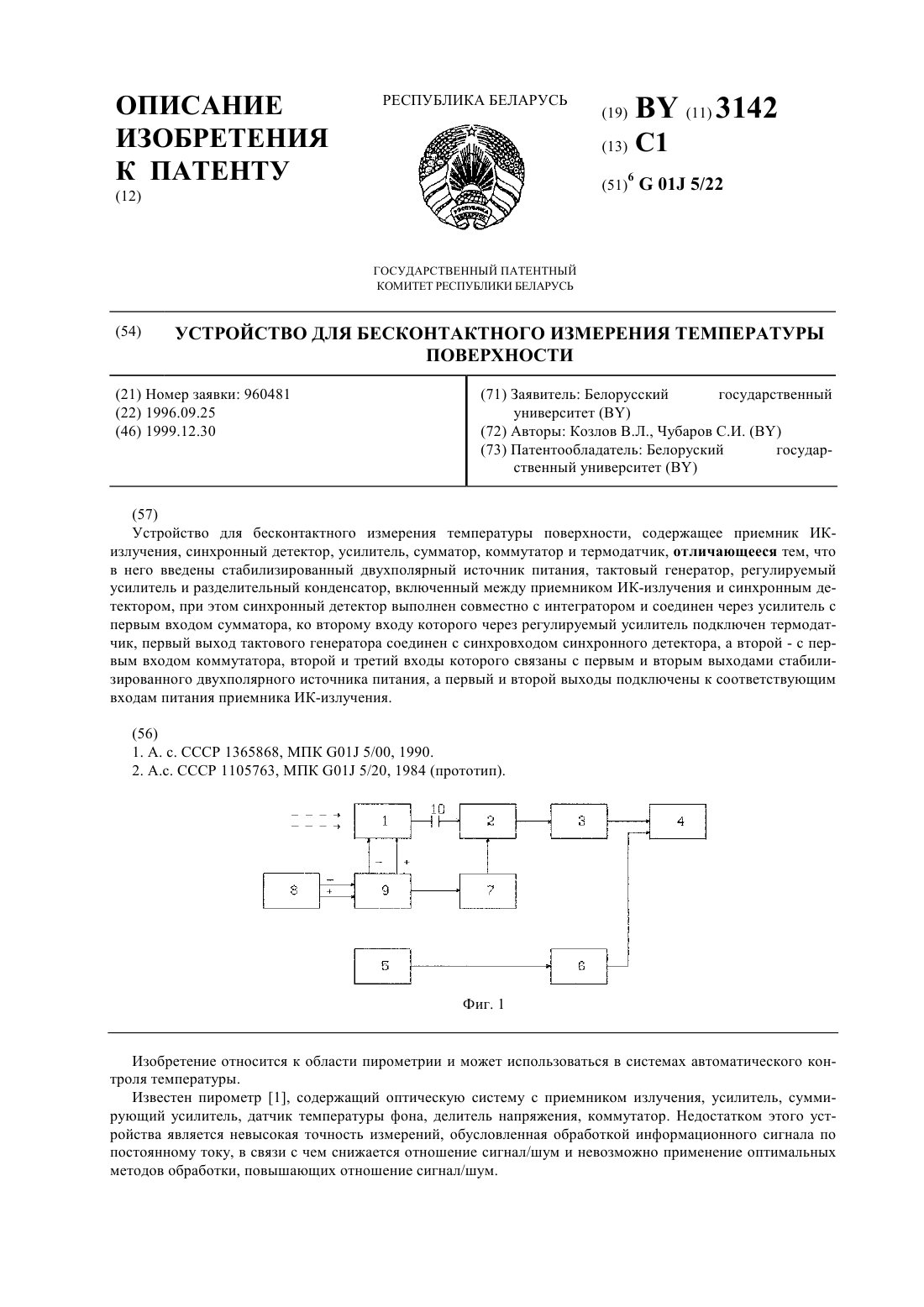
Устройство для бесконтактного измерения температуры поверхности
Номер патента: 3142
Опубликовано: 30.12.1999
Авторы: Козлов Владимир Леонидович, Чубаров Сергей Ильич
МПК: G01J 5/22
Метки: поверхности, бесконтактного, измерения, устройство, температуры
Текст:
...ДУ появится напряжение , характеризующее температуру объекта (фиг. 2 б). При изменении питания моста на противоположное на выходе ДУ появится напряжение -(фиг. 2 б). Таким образом, при периодическом изменении напряжения питания БМ на противоположное на его выходе будет переменный сигнал с амплитудой, характеризующей температуру измеряемого объекта. Динамический режим питания балансного моста позволяет получить переменный электрический...
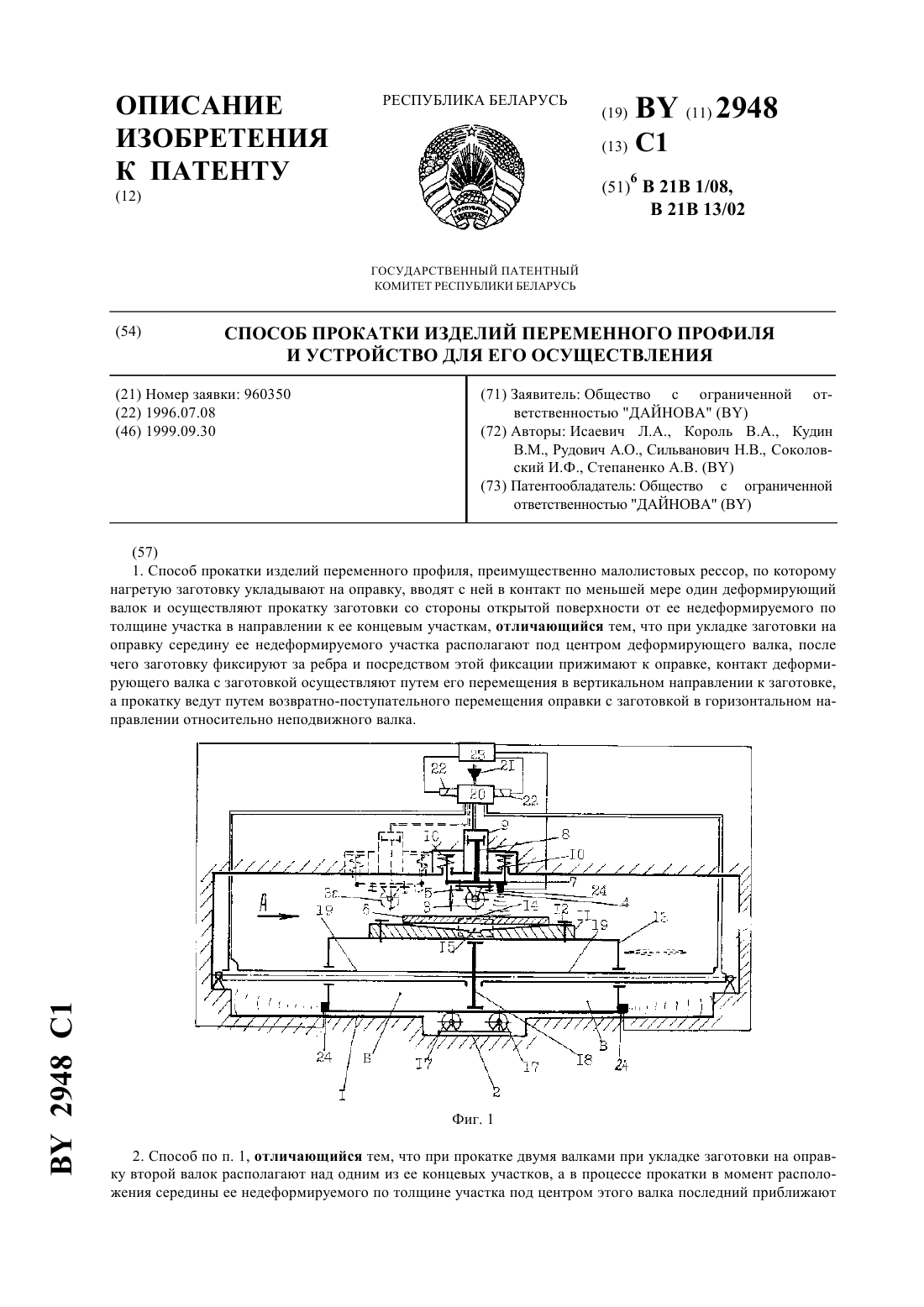
Способ прокатки изделий переменного профиля и устройство для его осуществления
Номер патента: 2948
Опубликовано: 30.09.1999
Авторы: Исаевич Леонид Александрович, КУДИН Виктор Михайлович, Сильванович Николай Владимирович, Соколовский Игорь Феликсович, Король Владимир Андреевич, Степаненко Александр Васильевич, Рудович Александр Олегович
МПК: B21B 13/02, B21B 1/08
Метки: осуществления, изделий, способ, устройство, переменного, прокатки, профиля
Текст:
...оправку, снабженную прижимом для заготовки, имеются следующие существенные отличия ложемент выполнен в виде горизонтально расположенного на опорных валках гидроцилиндра, профилированная оправка закреплена на верхней поверхности его корпуса, а поршень гидроцилиндра соединен с закрепленными в станине полыми штоками, сообщенными с внутренней полостью гидроцилиндра и через распределитель с источником текучей среды, который соединен с...
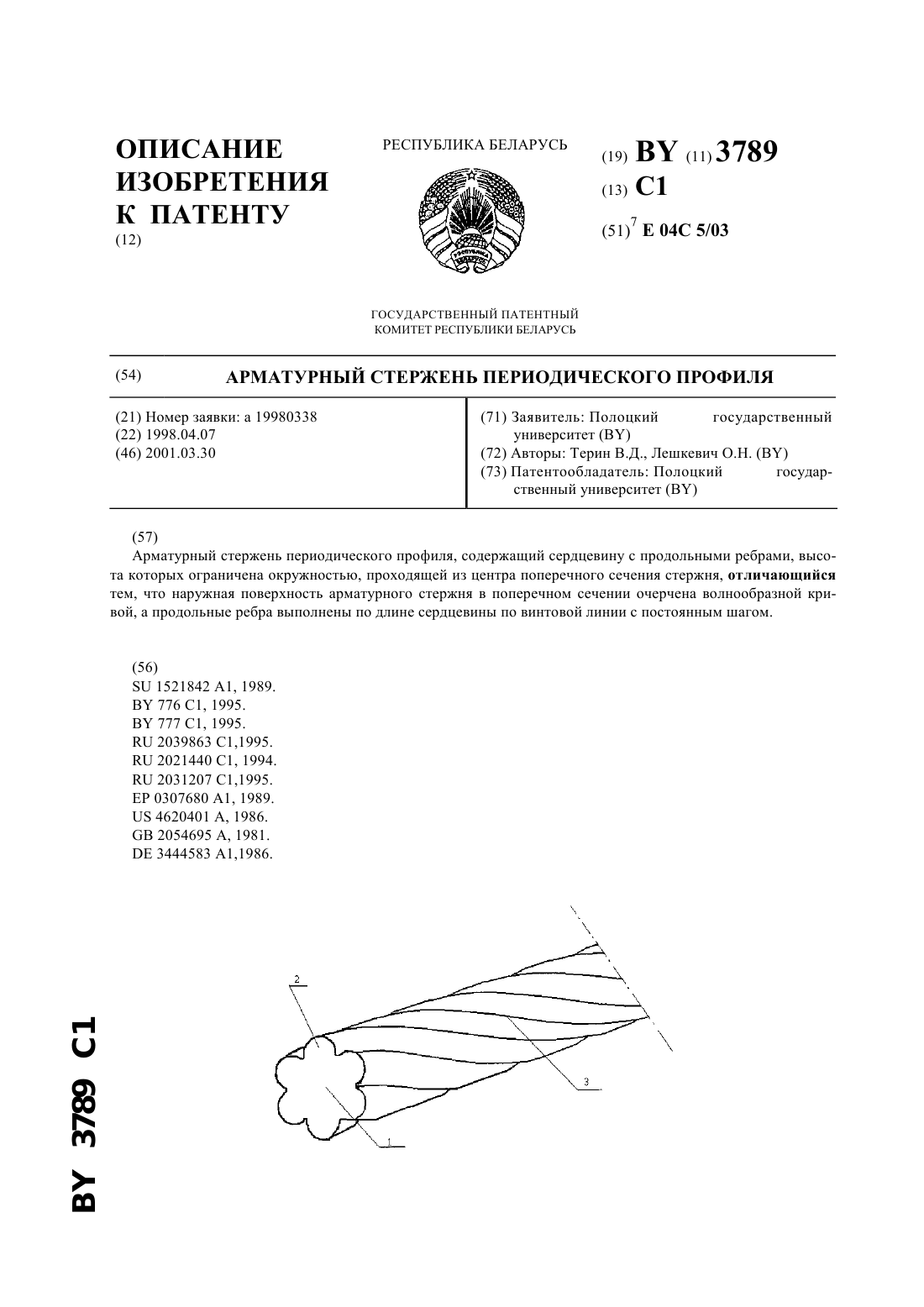
Арматурный стержень периодического профиля
Номер патента: 3789
Опубликовано: 30.03.2001
Авторы: Лешкевич Олег Николаевич, Терин Вячеслав Дмитриевич
МПК: E04C 5/03
Метки: периодического, стержень, профиля, арматурный
Текст:
...обеспечить необходимую конфигурацию продольных ребер. Задачей настоящего изобретения является создание периодического профиля арматурного стержня, обеспечивающего меньшую металлоемкость и надежное сцепление с бетоном. Для выполнения поставленной задачи разработан арматурный стержень периодического профиля, содержащий сердцевину с продольными ребрами, высота которых ограничена окружностью, проходящей из центра поперечного сечения стержня, при...
Предыдущий патент: Каток
Следующий патент: Способ производства этилового спирта на установке периодического действия, ректификационная установка для его осуществления (варианты)
Случайный патент: Способ визуализации звука и устройство для его осуществления