Система автоматического управления гидромеханической трансмиссией
Номер патента: 5522
Опубликовано: 30.09.2003
Авторы: Абрашкин Валерий Павлович, Тарасик Владимир Петрович, Бочкарев Геннадий Владимирович, Рынкевич Сергей Анатольевич
Текст
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГИДРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ(71) Заявитель Учреждение образования Могилевский государственный технический университет(72) Авторы Тарасик Владимир Петрович Рынкевич Сергей Анатольевич Бочкарев Геннадий Владимирович Абрашкин Валерий Павлович(73) Патентообладатель Учреждение образования Могилевский государственный технический университет(57) 1. Система автоматического управления гидромеханической трансмиссией, включающая двигательную подсистему, содержащую двигатель и устройство управления скоростными режимами двигателя, включающее устройство подачи топлива и рычаг управления скоростными режимами, кинематически связанный с двигателем гидротрансформатор с турбинным колесом и муфтой блокировки, коробку передач с фрикционными муфтами переключения передач, связанную своим входным валом с турбинным колесом гидротрансформатора, датчик скорости турбинного колеса, связанный с турбинным колесом гидротрансформатора, датчик нагрузки, связанный с педалью акселератора, датчик положения педали тормоза, связанное с коробкой передач и гидротрансформатором исполнительное устройство переключения передач и блокировки гидротрансформатора с электрогидравлическими клапанами, отличающаяся тем, что содержит преобразователь-мультиплексор сигналов датчиков нагрузки, положения педали тормоза и скорости турбинного 5522 1 колеса, датчики состояния фрикционных муфт коробки передач и муфты блокировки гидротрансформатора, преобразователь-мультиплексор сигналов датчиков состояния фрикционных муфт коробки передач и муфты блокировки гидротрансформатора, программноуправляемое регулирующее устройство, центральное управляющее устройство, подключенное к информационному входу программно-управляемого регулирующего устройства,устройство памяти характеристик гидромеханической трансмиссии, устройство памяти алгоритмов управления гидромеханической трансмиссией и скоростными режимами двигателя, преобразователь-демультиплексор исполнительного устройства, усилители мощности,причем устройство управления скоростными режимами двигателя содержит исполнительный гидроцилиндр и трехпозиционный электрогидравлический клапан, выполненный с возможностью попеременного подключения рабочих полостей исполнительного гидроцилиндра к напорной или сливной гидролинии либо одновременного соединения их со сливной гидролинией, причем рычаг управления скоростными режимами одним плечом,через исполнительный гидроцилиндр, связан с педалью акселератора, а другим - с устройством подачи топлива, при этом выходы датчиков скорости, нагрузки, педали тормоза,состояния фрикционных муфт коробки передач и муфты блокировки гидротрансформатора связаны с соответствующими входами преобразователей мультиплексоров, выходы которых объединены и связаны с информационным входом программно-управляемого регулирующего устройства, информационный выход которого связан с входом преобразователядемультиплексора, выходы которого через усилители мощности связаны с соответствующими входами электрогидравлических клапанов устройств переключения передач и блокировки гидротрансформатора и входами трехпозиционного электрогидравлического клапана, при этом адресные выходы программно-управляемого регулирующего устройства связаны с входами устройств памяти характеристик гидромеханической трансмиссии и алгоритмов управления, а его входы данных подключены к выходам устройств памяти. 2. Система по п. 1, отличающаяся тем, что программно-управляемое регулирующее устройство имеет дополнительные выходы, которые подключены к соответствующим входам/выходам устройства памяти характеристик гидромеханической трансмиссии, причем последнее выполнено с возможностью перезаписи параметров при изменении характеристик и режимов движения транспортного средства. 3. Система по п. 1, отличающаяся тем, что выходы преобразователя-демультиплексора выполнены в виде широтно-импульсных преобразователей, а устройство памяти алгоритмов управления гидромеханической трансмиссией и скоростными режимами двигателя содержит дополнительные алгоритмы управления изменяющимися во времени характеристиками нарастания и спада воздействий на электрогидравлические клапаны муфт переключения передач при их замыкании и размыкании. 4. Система по п. 1, отличающаяся тем, что содержит датчики состояния двигательной подсистемы, преобразователь-мультиплексор сигналов датчиков нагрузки, положения педали тормоза и скорости турбинного колеса гидротрансформатора, содержит дополнительные входы, связанные с соответствующими выходами датчиков состояния двигательной подсистемы, преобразователь-демультиплексор содержит дополнительные выходы, связанные с электрогидравлическим клапаном блокировки гидротрансформатора и трехпозиционным электрогидравлическим клапаном, а устройство памяти алгоритмов управления содержит дополнительные алгоритмы управления скоростными режимами двигателя. 5. Система по п. 1, отличающаяся тем, что она снабжена комплектом датчиков внешней среды и энергонезависимым запоминающим устройством характеристик маршрута,дорожных условий и ситуаций, своими входами связанным с соответствующими адресными выходами программно-управляемого регулирующего устройства, а выходами с соответствующими адресными входами последнего, причем датчики внешней среды своими выходами связаны с соответствующими входами преобразователя-мультиплексора сигналов датчиков нагрузки, положения педали тормоза и скорости турбинного колеса гидро 2 5522 1 трансформатора, а энергонезависимое запоминающее устройство характеристик маршрута, дорожных условий и ситуаций выполнено с возможностью накапливания изменяющихся в зависимости от времени и пройденного пути параметров маршрута и дорожных условий, устройство памяти алгоритмов управления гидромеханической трансмиссией и скоростными режимами двигателя содержит самообучающийся оптимизирующий алгоритм, выполненный с возможностью анализа данных в энергонезависимом запоминающем устройстве характеристик маршрута, дорожных условий и ситуаций и коррекции основного алгоритма управления гидромеханической трансмиссией применительно к маршрутам, режимам движения и дорожным ситуациям. 6. Система по п. 5, отличающаяся тем, что центральное управляющее устройство снабжено аппаратным или программным переключателем используемых оптимальных алгоритмов в зависимости от выбранных водителем маршрутов, режимов движения и программ управления.(56)2010734 1, 1994.2038227 1, 1995.4285252 , 1981.0549001 , 1993.0633155 , 1995.3243461 1, 1983.54072822 , 1979. Изобретение относится к транспортному машиностроению, а именно к системам автоматического управления трансмиссиями транспортных средств. Известны система автоматического управления гидромеханической трансмиссией по А.с. СССР 1763257, 1992 и система автоматического управления скоростными и нагрузочными режимами по патенту РФ 2010734, 1994. Указанные системы содержат следующие основные элементы датчики скорости, связанные с турбинным валом гидротрансформатора, датчики нагрузки, связанные с педалью акселератора, датчики педали тормоза, подсистемы автоматического переключения передач и автоматической блокировки гидротрансформатора, содержащие клапаны высших,низших передач и блокировки гидротрансформатора, исполнительные устройства переключения передач и блокировки гидротрансформатора, связанные с муфтами переключения передач и блокировкой гидротрансформатора соответственно, устройства управления скоростными режимами двигателя, клапаны разблокировки гидротрансформатора, реле времени, сигнализаторы переключения передач. Упомянутые системы автоматического управления не позволяют реализовать полностью потенциальные возможности транспортного средства и занижают его техникоэкономические показатели в связи с тем, что не учитывают многообразие дорожных условий, а также характер управляющего воздействия на органы управления транспортным средством. Это выражается, во-первых, в том, что алгоритмы управления переключением передач и блокировкой гидротрансформатора, оптимальные для одних режимов движения машины, не будут оптимальны для других режимов. Упомянутые системы снабжены жесткими программами автоматического управления, которые лишены возможности оперативного перепрограммирования при изменении условий эксплуатации транспортного средства. Поэтому в одних условиях движения машины (например, на магистрали) показатели тягово-скоростных свойств и топливной экономичности (в частности, средняя скорость движения, путевой расход топлива, производительность) будут иметь одни зна 3 5522 1 чения, а в других условиях движения в зависимости от типа автомобиля (при использовании его на городских или карьерных маршрутах) эти показатели будут иметь совершенно другие значения, зачастую далеко не оптимальные. Во-вторых, в упомянутых системах не учитывается характер воздействия (темп и скорость нажатия) на педали акселератора и тормоза в процессе управления транспортным средством. В-третьих, данные системы не обеспечивают возможность регулирования длительности переходных процессов, в течение которых гидротрансформатор должен быть разблокирован. Существенным недостатком упомянутых систем является невысокое качество переходных процессов при переключениях передач, поскольку управление скоростными режимами двигателя при автоматических переключениях производится по жесткому неизменяемому алгоритму. При работе транспортных средств в тяжелых условиях эксплуатации (например, при работе большегрузных карьерных самосвалов) для снижения динамических нагрузок в трансмиссии необходимо обеспечить гибкое (по определенным оптимальным алгоритмам) и комплексное управление как скоростными режимами двигателя, так и процессом плавного включения фрикционов переключения передач. Этого данные системы не обеспечивают. Недостатком упомянутых систем является также их неадаптивность и необучаемость. Отмеченный недостаток носит комплексный характер и выражается в том, что данные системы, с одной стороны, не имеют возможности обучения новым алгоритмам управления при изменении условий эксплуатации транспортного средства и рациональным приемам управления в нештатных и опасных ситуациях, а также они лишены способности прогнозирования и парирования опасных ситуаций. С другой стороны, упомянутые системы не приспособлены к тому, чтобы реализовывать оптимальные алгоритмы управления переключением передач и блокировкой гидротрансформатора машины во всем многообразии дорожных условий и режимов движения. Задачами данного изобретения являются повышение надежности работы и расширение функциональных возможностей системы автоматического управления гидромеханической трансмиссией, повышение качества переходных процессов и снижение динамических нагрузок в трансмиссии, улучшение управляемости транспортного средства и увеличение безопасности движения. Указанные задачи достигаются тем, что система автоматического управления гидромеханической трансмиссией, включающая двигательную подсистему, содержащую двигатель и устройство управления скоростными режимами двигателя с устройством подачи топлива и рычагом управления скоростными режимами, связанный с двигателем гидротрансформатор с турбинным колесом и муфтой блокировки, коробку передач с фрикционными муфтами переключения передач, связанную своим входным валом с турбинным колесом, датчик скорости турбинного колеса, связанный с турбинным колесом гидротрансформатора, датчик нагрузки, связанный с педалью акселератора, датчик положения педали тормоза, связанное с коробкой передачи и гидротрансформатором исполнительное устройство переключения передач и блокировки гидротрансформатора с электрогидравлическими клапанами, согласно изобретению, снабжена преобразователем-мультиплексором сигналов датчиков нагрузки, положения педали тормоза и скорости турбинного колеса,датчиками состояния фрикционных муфт и муфты блокировки гидротрансформатора,преобразователем-мультиплексором сигналов датчиков состояния фрикционных муфт коробки передач и муфты блокировки гидротрансформатора, программно-управляемым регулирующим устройством, центральным управляющим устройством, подключенным к информационному входу программно-управляемого регулирующего устройства, устройством памяти характеристик гидромеханической трансмиссии, устройством памяти алгоритмов управления трансмиссией и скоростными режимами двигателя, преобразователемдемультиплексором исполнительного устройства, усилителями мощности, причем устройство управления скоростными режимами двигателя содержит исполнительный гидро 4 5522 1 цилиндр и трехпозиционный электрогидравлический клапан, выполненный с возможностью попеременного подключения рабочих полостей исполнительного гидроцилиндра к напорной или сливной гидролинии либо одновременного их соединения со сливной гидролинией, при этом выходы датчиков скорости, нагрузки, педали тормоза, состояния фрикционных муфт коробки передач и муфты блокировки гидротрансформатора связаны с соответствующими входами преобразователей-мультиплексоров, выходы которых объединены и связаны с информационным входом программно-управляемого регулирующего устройства, информационный выход которого связан с входом преобразователя-демультиплексора, выходы которого через усилители мощности связаны с соответствующими входами электрогидравлических клапанов устройств переключения передач и блокировки гидротрансформатора и входами трехпозиционного электрогидравлического клапана, при этом адресные выходы программно-управляемого регулирующего устройства связаны с входами устройств памяти характеристик трансмиссии и алгоритмов управления, а его входы данных подключены к выходам устройств памяти. Кроме того, программноуправляемое регулирующее устройство снабжено дополнительными выходами, которые подключены к входам/выходам устройства памяти характеристик трансмиссии, причем последнее выполнено с возможностью перезаписи параметров при изменении характеристик и режимов движения транспортного средства. Помимо этого, выходы преобразователя-демультиплексора выполнены в виде широтно-импульсных преобразователей, а устройство памяти алгоритмов управления трансмиссией и скоростными режимами двигателя содержит дополнительные алгоритмы управления изменяющимися во времени характеристиками нарастания и спада воздействий на электрогидравлические клапаны муфт переключения передач при их замыкании и размыкании. Далее, система содержит датчики состояния двигательной подсистемы, преобразователь-мультиплексор сигналов датчиков нагрузки, положения педали тормоза и скорости турбинного колеса, содержит дополнительные входы, связанные с соответствующими выходами датчиков состояния двигательной подсистемы, преобразователь-демультиплексор содержит дополнительные выходы,связанные с клапаном блокировки гидротрансформатора и трехпозиционным электрогидравлическим клапаном, а устройство памяти алгоритмов управления содержит дополнительные алгоритмы управления скоростными режимами двигателя. Система снабжена также комплектом датчиков внешней среды и дополнительным энергонезависимым запоминающим устройством характеристик маршрута, дорожных условий и ситуаций, своими входами связанным с соответствующими адресными выходами программно-управляемого регулирующего устройства, а выходами с соответствующими адресными входами последнего, причем датчики внешней среды своими выходами связаны с соответствующими входами преобразователя-мультиплексора сигналов датчиков нагрузки, положения педали тормоза и скорости турбинного колеса, а энергонезависимое запоминающее устройство характеристик маршрута, дорожных условий и ситуаций выполнено с возможностью накапливания изменяющихся в зависимости от времени и пройденного пути параметров маршрута и дорожных условий, при этом устройство памяти алгоритмов управления трансмиссией и режимами двигателя содержит самообучающийся оптимизирующий алгоритм, выполненный с возможностью анализа данных в энергонезависимом запоминающем устройстве и коррекции основного алгоритма управления трансмиссией применительно к маршрутам, режимам движения и дорожным ситуациям. Кроме того,центральное управляющее устройство дополнительно снабжено аппаратным либо программным переключателем используемых оптимальных алгоритмов в зависимости от выбранных водителем маршрутов, режимов движения и программ управления. Достижение поставленных задач обеспечивается использованием в системе следующих взаимодействующих друг с другом подсистем подсистемы формирования задающих воздействий измерительно-преобразовательной подсистемы, включающей в себя комплект датчиков внешней среды и два преобразователя-мультиплексора сигналов датчиков 5 5522 1 нагрузки, положения педали тормоза и скорости и сигналов датчиков состояния фрикционных муфт коробки передач и муфты блокировки гидротрансформатора центрального управляющего устройства, состоящего из устройства ввода/вывода информации, центрального процессорного устройства и интерфейсного блока локального управляющего устройства, содержащего программно-управляемое регулирующее устройство, устройство памяти алгоритмов управления трансмиссией и скоростными режимами двигателя, устройство памяти характеристик трансмиссии, устройство памяти характеристик маршрутов и дорожных условий преобразователя-демультиплексора исполнительного устройства и усилителей мощности. В результате комплексного использования упомянутых подсистем и устройств система автоматического управления гидромеханической трансмиссией обеспечивает ряд важных функций управления, контроля и защиты и наделяется интеллектуальными качествами,свойственными логическому мышлению человека. Во-первых, система учитывает многообразие дорожных условий и характер управляющего воздействия на органы управления транспортным средством, реализуя оптимальные характеристики управления переключением передач и блокировкой гидротрансформатора в реальных ездовых циклах. Вовторых, система позволяет осуществить адаптацию характеристик и параметров управления гидромеханической трансмиссией при изменении режимов и условий движения машины. В-третьих, система обеспечивает гибкое комплексное управление скоростными режимами двигателя и процессом плавного включения фрикционов переключения передач с возможностью изменения и перенастройки параметров. В-четвертых, обеспечивается возможность регулирования длительности переходных процессов, в течение которых гидротрансформатор автоматически разблокируется при переключениях передач. В-пятых,система учитывается характер командного управления (скорость и темп воздействия на педали акселератора и тормоза) при движении транспортного средства. В-шестых, система выполнена с возможностью обучения новым алгоритмам управления при изменении условий эксплуатации транспортного средства, приобретения навыков рационального управления в нештатных и экстремальных ситуациях и прогнозирования опасных ситуаций. Сущность изобретения поясняется рисунками. На фиг. 1 изображена система автоматического управления гидромеханической трансмиссией, на фиг. 2 графически показаны законы переключения передач, блокировки и разблокировки гидротрансформатора. Система автоматического управления гидромеханической трансмиссией содержит а) подсистему формирования задающих воздействий 1, состоящую из датчика 2 нагрузки, связанного с педалью акселератора 3, датчика 4 тормоза, связанного с педалью тормоза 5 б) центральное управляющее устройство 6, состоящее из устройства ввода/вывода информации 7, выступающего в роли переключателя оптимальных маршрутов, центрального процессорного устройства 8 и интерфейсного блока 9 в) измерительно-преобразовательную подсистему 10, включающую в себя комплект датчиков внешней среды 11, преобразователь-мультиплексор 12 сигналов датчиков нагрузки, положения педали тормоза и скорости турбинного колеса, преобразовательмультиплексор 13 сигналов датчиков состояния фрикционных муфт коробки передач и муфты блокировки гидротрансформатора г) локальное управляющее устройство 14, содержащее программно-управляемое регулирующее устройство 15, выполненное в виде локального процессорного устройства с информационными входами 16 и выходами 17, адресными выходами 18, входами 19 и выходами 20 данных устройство 21 памяти алгоритмов управления гидромеханической трансмиссией и скоростными режимами двигателя устройство 22 памяти характеристик гидромеханической трансмиссии устройство 23 памяти характеристик маршрутов, дорожных условий и ситуаций 6 5522 1 д) преобразователь-демультиплексор 24 и усилители мощности 25 е) двигательную подсистему 26, состоящую из собственно двигателя 27 и устройства управления скоростными режимами, в состав которого входят рычаг 28 управления скоростными режимами устройство подачи топлива 29 исполнительный гидроцилиндр 30 трехпозиционный электрогидравлический клапан 31, выполненный с возможностью соединения в одной из крайних своих позиций рабочих полостей исполнительного гидроцилиндра 30 посредством гидролиний 32 и 33 попеременно либо с напорной линией 34,либо со сливом 35, причем в средней позиции клапана 31 гидролинии 32 и 33 соединены со сливом 35 комплект 36 датчиков состояния двигательной подсистемы ж) гидротрансформатор 37 с насосным 38 и турбинным 39 колесами электрогидравлический клапан 40, выполненный с возможностью соединения в первой своей позиции муфты 41 блокировки гидротрансформатора посредством гидролинии 42 со сливом 43, а во второй своей позиции - с напорной гидролинией 44 датчик 45 состояния муфты блокировки датчик 46 скорости турбинного колеса 39 гидротрансформатора 37 з) коробку передач 47, содержащую входной 48 и выходной 49 валы фрикционные муфты 50-55 переключения передач электрогидравлические клапаны 56-61, соединяющие в первых позициях со ответствующие фрикционные муфты 50-55 посредством гидролиний 62-67 соответственно со сливными линиями 68-73, а во вторых позициях - с напорными гидролиниями 74-79 датчики 80-85 состояния фрикционных муфт 50-55. Для передачи сигналов между элементами системы использованы шины 86, 87 и 88. Система автоматического управления гидромеханической трансмиссией работает следующим образом. Предположим, что машина движется на текущей передаче п. Например,п 2, при этом включена фрикционная муфта 51. Электрогидравлический клапан 57 находится во второй позиции, при которой напорная линия 75 посредством гидролинии 63 соединена с фрикционной муфтой 51. При движении машины датчики скорости 46, нагрузки 2 и тормоза 4 вырабатывают следующие информационные сигналы Р, соответствующий угловой скорости турбинного колеса 39 гидротрансформатора, Р, соответствующий положению педали 3 акселератора,и Р, соответствующий положению педали 5 тормоза. Сигналы Р,и Р по шине 86 поступают в преобразователь-мультиплексор 12, который преобразует эти сигналы в цифровую форму, мультиплексирует (смешивает) их и наряду с другими сигналами, полученными от комплекта датчиков внешней среды 11 и состояния двигательной подсистемы 36, передает их на информационный вход 16 программно-управляемого регулирующего устройства 15. Аналогичным образом посредством преобразователя-мультиплексора 13 обрабатываются поступающие на него по шине 87 сигналы с датчиков 80-85 состояния фрикционных муфт 50-55. Дальнейшие преобразования сигналов осуществляются по программе, заложенной в устройстве 21 памяти алгоритмов в соответствии с законами переключения передач и блокировки гидротрансформатора, графически изображенными на фиг. 2. Законы управления закладываются в устройство 22 памяти характеристик гидромеханической трансмиссии в виде релейных функций переключения передач и блокировки гидротрансформатора от скорости Р и нагрузки Р. При снижении нагрузки на двигатель скорость турбинного колеса 39 гидротрансформатора 37, связанного с входным 48 валом коробки передач 47, увеличивается. Значение информационного сигнала Р возрастает, и при достижении порогового значения, определяемого законами переключения передач (характеристика ВП на фиг. 2), формируется релейный сигнал переключения на высшие передачи. Если текущая передача не макси 7 5522 1 мальная, что имеет место для рассматриваемого случая п 2, то значение п инкрементируется (к текущему номеру включенной передачи прибавляется 1). В противном случае,когда текущий номер включенной передачи принимает свое максимально возможное значение (для рассматриваемой коробки передач п 6), инкрементирование не производится. Управление блокировкой (разблокировкой) гидротрансформатора 37 система осуществляет следующим образом. Если происходит увеличение скорости турбинного колеса гидротрансформатора,например, при разгоне машины, то при соответствующем уровне информационного сигнала Р формируется релейный сигнал на блокировку гидротрансформатора в соответствии с характеристикой Б, изображенной на фиг. 2. Из графических законов управления видно, что управление блокировкой гидротрансформатора предшествует процессу переключения на высшие передачи (т.к. характеристика Б расположена левее характеристики ВП). Описанные выше операции в устройстве 15 определяются командами, записанными в устройстве 21 памяти алгоритмов. Значения параметров законов управления, например уровни срабатывания релейных функций переключения, записаны в устройстве 22 памяти характеристик трансмиссии. Как команды, так и параметры законов управления занесены в соответствующие устройства памяти 21 и 22 под определенными адресами. Принцип выборки команд и параметров состоит в том, что устройство 15 сначала устанавливает на своих адресных выходах 18 адрес команды или параметра, а затем читает содержимое по этому адресу через свои входы данных 19. Кроме сигнала на переключение передач устройством 15 аналогичным образом формируется сигнал блокировки (разблокировки) гидротрансформатора и два сигнала на устройство управления скоростными режимами двигателя. Полученное новое значение сигнала п дополняется сигналом на блокировку (разблокировку) гидротрансформатора, сигналами на управление скоростными режимами двигателя и сохраняется в оперативной памяти программно-управляемого регулирующего устройства 15. Далее эти сигналы преобразуется в последовательный код, который через информационный выход 17 подается на вход преобразователя-демультиплексора 24. Преобразователь-демультиплексор 24 производит обратное преобразование последовательного кода в параллельный. Для рассматриваемого случая на его третьем выходе появится единичный сигнал, а на втором выходе - нулевой сигнал. Нулевой сигнал останется и на остальных выходах. Сигналы на дополнительных выходах преобразователя-демультиплексора 24 для блокировки (разблокировки) гидротрансформатора и управление скоростными режимами двигателя могут принимать одно из следующих возможных значений 000 - гидротрансформатор разблокирован (электрогидравлический клапан 40 находится в нижней позиции), а электрогидравлический клапан 31 находится в средней позиции 100 - гидротрансформатор заблокирован (электрогидравлический клапан 40 находится в верхней позиции), а электрогидравлический клапан 31 находится в средней позиции 001 - гидротрансформатор разблокирован, а электрогидравлический клапан 31 находится в крайней верхней позиции 101 - гидротрансформатор заблокирован, а электрогидравлический клапан 31 находится в крайней верхней позиции 010 - гидротрансформатор разблокирован, а электрогидравлический клапан 31 находится в крайней нижней позиции 110 - гидротрансформатор заблокирован, а электрогидравлический клапан 31 находится в крайней нижней позиции. Первые шесть выходных сигналов с преобразователя-демультиплексора 24 через усилители мощности 25 по шине 88 поступают на электромагниты электрогидравлических 8 5522 1 клапанов 56-61 переключения передач, оставшиеся три сигнала также через усилители мощности 25 поступают на электромагниты электрогидравлического клапана 40 блокировки (разблокировки) гидротрансформатора и электрогидравлического клапана 31 управления скоростными режимами двигателя. В результате вышеописанного процесса отключения второго выхода и включения третьего выхода усилителя мощности 25 электрогидравлический клапан 57 выключаемой передачи перемещается в первую (нижнюю на фиг. 1) позицию, соединяя фрикционную муфту 51 выключаемой (в данном случае второй) передачи посредством гидролинии 63 со сливом 69, а электрогидравлический клапан 58 включаемой передачи перемещается во вторую (верхнюю) позицию и посредством гидролинии 64 соединяет фрикционную муфту 52 включаемой смежной (в данном случае третьей) передачи с напорной гидролинией 76. В результате происходит переключение на высшую передачу. После переключения на высшую передачу вследствие уменьшения передаточного числа трансмиссии угловая скорость турбинного вала гидротрансформатора уменьшается,значение информационного сигнала Р оказывается в зоне оптимальной загрузки двигателя (область, расположенная между характеристиками НП и ВП на фиг. 2). В этом случае сигналы на переключения передач не формируются, и машина движется на текущей передаче, которая является оптимальной для данного режима загрузки двигателя. Блокирование гидротрансформатора 37 осуществляется при достижении информационного сигнала Р порогового значения на блокировку гидротрансформатора в соответствии с характеристикой Б на фиг. 2. При этом подается электрический сигнал на электромагнит электрогидравлического клапана 40, который перемещается в верхнюю позицию, соединяя муфту 41 блокировки гидротрансформатора посредством гидролинии 42 с напорной гидролинией 44. В результате гидротрансформатор 37 блокируется. Аналогичным образом осуществляется разблокирование гидротрансформатора 37, что происходит при достижении информационного сигнала Р порогового значения на разблокировку гидротрансформатора в соответствии с характеристикой Р на фиг. 2. При этом сигнал на соответствующем выходе преобразователя-демультиплексора 24 (в данном случае на седьмом выходе, отвечающем за блокирование/разблокирование гидротрансформатора) меняет свое значение с единичного на нулевое. В результате электрогидравлический клапан 40 перемещается в нижнюю позицию, соединяя муфту 41 блокировки гидротрансформатора со сливом 43. В случае увеличения нагрузки на двигатель скорость машины снижается, и система осуществляет переключение на низшую передачу. Процесс переключения на низшую передачу протекает аналогично процессу переключения на высшую передачу. При этом релейный сигнал на переключение на низшие передачи формируется при достижении информационного сигнала Р порогового значения, соответствующего моменту переключения на низшие передачи (характеристика НП на фиг. 2). Для улучшения качества переходных процессов при автоматическом переключении передач необходимо, чтобы гидротрансформатор был разблокирован. С этой целью алгоритмом автоматического управления гидромеханической трансмиссией предусмотрена принудительная временная разблокировка гидротрансформатора 37 при переключениях передач. Для этого в устройстве 21 памяти алгоритмов предусмотрено подключение программного реле времени с управляемой задержкой. Величина задержки 3 входит в число адаптируемых параметров системы. Адаптация параметров гидромеханической трансмиссии осуществляется путем изменения уровней переключения передач, времени принудительной разблокировки гидротрансформатора и уровней блокировки/разблокировки гидротрансформатора. Для этого при помощи центрального управляющего устройства 6 изменяется содержимое соответствующих адаптируемым параметрам ячеек устройства памяти характеристик трансмиссии 22. 9 5522 1 Для повышения качества переходных процессов и снижения динамических нагрузок в трансмиссии при переключениях передач необходимо осуществлять управление скоростным режимом двигателя. Управление скоростным режимом двигателя 27 при автоматическом переключении передач осуществляется системой следующим образом. Положение рычага 28 управления скоростными режимами двигателя определяется перемещением поршня исполнительного гидроцилиндра 30, зависящее от объема (порций) подаваемой в его рабочие полости жидкости. Объем жидкости, подаваемой в рабочие полости гидродилиндра 30, в свою очередь определяется скважностью импульсов, формируемых преобразователем-демультиплексором 24 и усиливаемых усилителями 25. При переключениях на высшие передачи импульсное регулирование трехпозиционным электрогидравлическим клапаном 31 осуществляется путем подачи импульсов на верхний электромагнит клапана 31. При этом клапан 31 перемещается в нижнюю позицию, соединяя одну из рабочих полостей исполнительного гидроцилиндра 30 посредством гидролинии 32 с напорной линией 34, а другую - посредством гидролинии 33 со сливом 35. Для обеспечения плавности регулирования скоростного режима в сливной гидролинии 35 целесообразна установка дросселя, параметры которого согласовываются со скважностью импульсов, подаваемых на электромагниты клапана 31. Рычаг 28 управления скоростными режимами двигателя при этом перемещается в сторону уменьшения подачи топлива (вправо), воздействуя на соответствующий орган устройства подачи топлива 29 (например, рейку топливного насоса), в результате чего скоростной режим двигателя 27 уменьшается. При переключениях на низшие передачи импульсное регулирование трехпозиционным электрогидравлическим клапаном 31 осуществляется путем подачи импульсов на нижний электромагнит клапана 31. Рычаг 28 управления скоростными режимами двигателя при этом перемещается в сторону увеличения подачи топлива (влево), в результате чего скоростной режим двигателя увеличивается. После завершения переходных процессов импульсы с электромагнитов клапана 31 убираются, в результате чего он возвращается в среднюю позицию, соединяя обе полости исполнительного гидроцилиндра 30 со сливом 35. При этом поршень гидроцилиндра 30 под действием пружины возвращается в среднее положение, восстанавливая исходный скоростной режим двигателя (тот, который был до переключения). При необходимости система может осуществлять управление процессом плавного включения фрикционными муфтами 50-55 переключения передач. Для этого в устройство 21 памяти алгоритмов управления гидромеханической трансмиссией и скоростными режимами двигателя закладываются соответствующие алгоритмы управления изменяющимися во времени характеристиками нарастания и спада воздействий на электрогидравлические клапаны муфт переключения передач при их замыкании и размыкании. При этом управление плавностью включения конкретной фрикционной муфты осуществляется путем регулирования тока электромагнита электрогидравлического клапана фрикционной муфты включаемой передачи посредством изменения скважности импульсов, формируемых преобразователем-демультиплексором 24 и усиливаемых усилителями 25. Рассмотрим работу системы при торможении машины. При этом возможны два режима торможение двигателем, когда педали 3 акселератора и тормоза 5 отпущены, и торможение с применением тормозных механизмов, когда педаль 5 тормоза нажата. При движении машины под уклон для повышения безопасности движения необходимо осуществлять запрет на включение высших передач. В этом случае целесообразно использовать тормозные свойства двигателя. Запрет на включение высших передач для такого режима,даже если информационный сигнал Р достигнет порогового значения на переключение на высшие передач, осуществляется локальным управляющим устройством 14 в соответствии с алгоритмом, заложенном в устройстве памяти 21. 10 5522 1 Если торможение двигателем на текущей передаче неэффективно, водитель нажимает педаль 5 тормоза. В этом случае локальное управляющее устройство 14 в соответствии с заложенным в устройство 21 памяти алгоритмом формирует сигнал на переключение на низшую передачу только при достижении определенного значения информационного сигнала Р. Этим создаются наилучшие условия для осуществления режима торможение двигателем. В процессе управления транспортным средством система имеет возможность учитывать характер командного управления. При этом приоритет управления остается за водителем, в результате чего он может в любой момент осуществить командное управление трансмиссией (например, заблаговременно включить нужную передачу или заблокировать/разблокировать гидротрансформатор). Учет командного воздействия на педали акселератора 3 и тормоза 5 выражен в том,что система различает характер этого воздействия. При плавном нажатии на педали система осуществляет автоматическое управление по основному алгоритму. При изменении окраски воздействия на педали акселератора или тормоза происходит переход системы на дополнительные программы управления. Например, при резком нажатии водителем на педаль 3 тормоза для повышения безопасности управления система переходит в состояние повышенной готовности. При этом, если процесс торможения водителем в течение заданного времени не прекращен, то система принимает решение о разблокировке гидротрансформатора 37. Многократное чередование процессов нажатия на педали акселератора и тормоза, а также резкое изменение значений дорожного сопротивления и величин макропрофиля дороги (уклонов) означает многообразие и сложность дорожных условий. В таких ситуациях частые переключения на высшие либо низшие передачи не являются целесообразными,поскольку ухудшается качество переходных процессов, возрастают динамические нагрузки в трансмиссии и на рабочем месте водителя, а также снижаются технико-экономические показатели машины. В этом случае система осуществляет запреты на кратковременные автоматические переключения передач. Это осуществляется, во-первых, посредством ввода задержки выполнения подпрограмм автоматического переключения передач, а во-вторых,путем анализа тенденций изменения показаний датчиков 11 внешней среды и дорожных условий, например уклона. Если дорожные условия улучшаются, упомянутые запреты снимаются локальным управляющим устройством 14. В процессе движения транспортного средства система имеет возможность адаптации к изменяющимся дорожным условиям и осуществлять оптимизацию параметров управления. Для оптимизации многообразия дорожных условий и характера управляющего воздействия на органы управления транспортным средством используется центральное управляющее устройство 6, в которое на этапе обучения эксперт посредством устройства ввода/вывода 7 вводит исходные данные. Оптимизирующая программа вычисляет наилучшие для данных дорожных условий параметры законов управления, передает их через интерфейсный блок 9 на информационный вход 10 локального управляющего устройства 14 и с его помощью записывает в устройство памяти 22 характеристик трансмиссии эти оптимальные значения. Аналогично происходит адаптация к маршрутам движения, только при этом полученные оптимальные значения записываются в устройство памяти 23 характеристик маршрутов. Вычисленные для каждой конкретной дорожной ситуации параметры законов управления дополняются измеренными динамическими характеристиками управляющего воздействия, запоминаются системой в энергонезависимом запоминающем устройстве 23 памяти характеристик маршрутов, дорожных условий и ситуаций и далее используются самообучающейся программой центрального управляющего устройства 8 в качестве исходных данных для обучения. Может быть учтено, в частности, поведение водителя в нештатных ситуациях, например, путем анализа производных от изменения положения педалей акселератора 3 и тормоза 5. 11 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B60K 41/06
Метки: автоматического, трансмиссией, управления, система, гидромеханической
Код ссылки
<a href="https://by.patents.su/12-5522-sistema-avtomaticheskogo-upravleniya-gidromehanicheskojj-transmissiejj.html" rel="bookmark" title="База патентов Беларуси">Система автоматического управления гидромеханической трансмиссией</a>
Система автоматического управления гидромеханической трансмиссией

Номер патента: 5082
Опубликовано: 30.03.2003
Авторы: Тарасик Владимир Петрович, Рынкевич Сергей Анатольевич
МПК: B60K 41/06
Метки: система, трансмиссией, гидромеханической, автоматического, управления
Текст:
...Система содержит датчик 34 хода педали 4 акселератора и датчик 35 хода педали 36 тормоза. Каждый из датчиков 34 и 35 выполнен в виде преобразователей перемещений в электрический сигнал, величина которого пропорциональна скорости перемещения соответствующих педалей. Датчик 34 хода педали 4 акселератора связан посредством усилителя-преобразователя 37 электрического сигнала, электронного ключа 38 и цепи управления 39 с электромагнитом...
Двухканальный гидравлический автомат управления гидромеханической трансмиссией

Номер патента: 4984
Опубликовано: 30.03.2003
Авторы: Минаев Георгий Федорович, Красневский Леонид Григорьевич, Басалаев Владимир Николаевич, Панченко Алексей Семенович, Высоцкий Михаил Степанович, Чвялев Владимир Ефимович, Поддубко Сергей Николаевич
МПК: B60K 41/06
Метки: управления, автомат, гидромеханической, гидравлический, трансмиссией, двухканальный
Текст:
...11, клапаны 15, 16 ИЛИ, исполнительный клапан 17 блокировки гидротрансформатора. Вход распределителя 9 связан с гидролинией 18 главного давления, которая подключена также к устройству 12, датчиком 6, 13 и клапану 14. Выходы 19 распределителя 9 подключены к гидроцилиндрам 3. Выход 20 клапана 17 подключен к гидроцилиндру 5 блокировки гидротрансформатора 4. Автомат 11 содержит три двухпозиционных пятилинейных клапана 21, 22 для переключения с...
Система автоматического управления
Номер патента: 27
Опубликовано: 30.05.1994
Автор: Дашкевич Валерий Викторович
МПК: G05B 19/00
Метки: управления, система, автоматического
Текст:
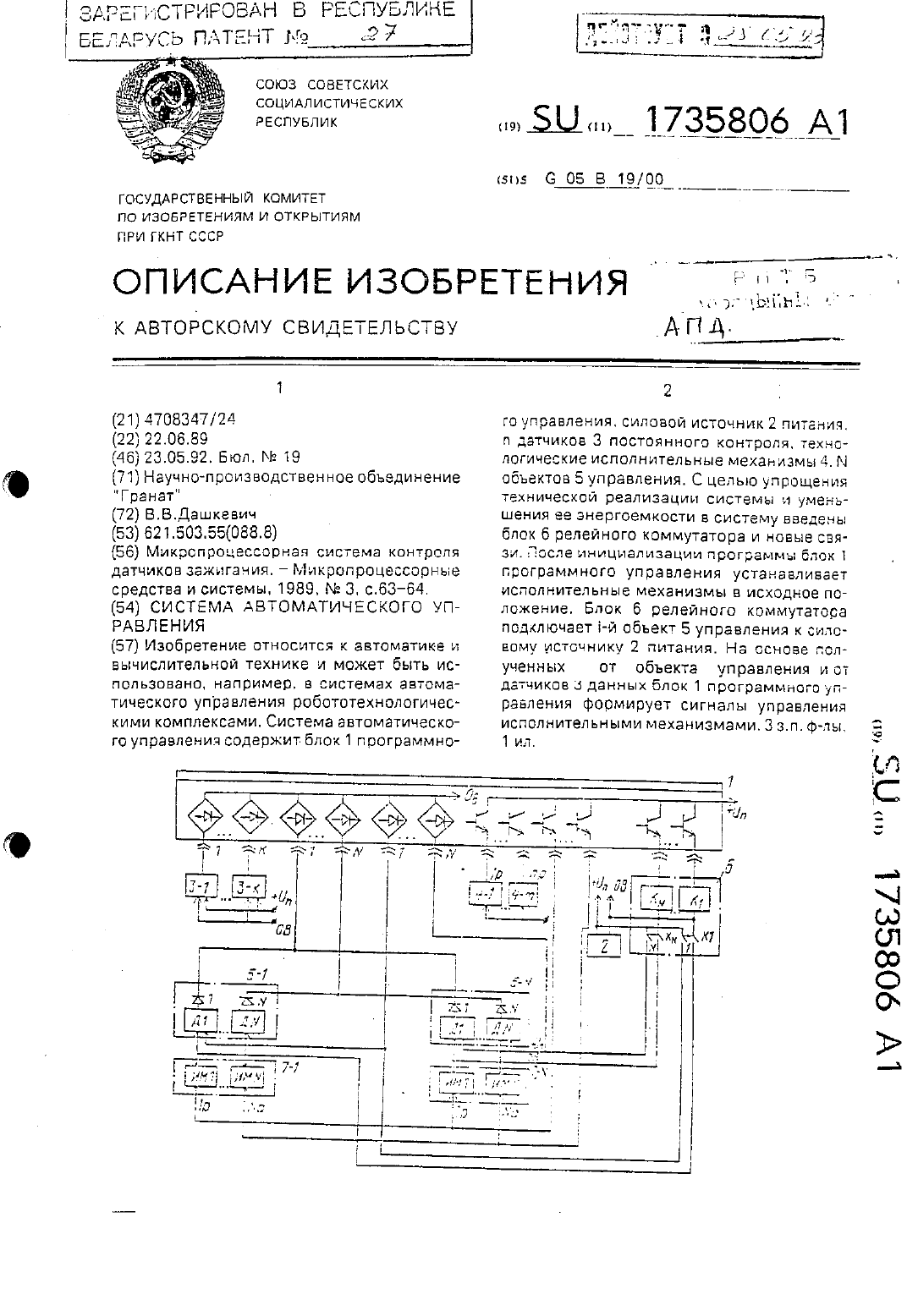
...программного управления. силовой источник 2 питания. датчики 3 постоянного контроля. технологические исПОЛНИТВЛЬНЫЕ МЭХЭНИЗМЫ 4, М групп датчиков 5 состояния. блок 6 релейной коммутации. М групп исполнительных механизмов 7.Блок 1 программного управления предНазначен для цихлового управления технологическим оборудованием. В качестве блока 1 программного управления. например, могут быть использованы системы управления промышленным роботом или...
Система автоматического управления двигателем
Номер патента: 4732
Опубликовано: 30.09.2002
Авторы: Поплавский Дмитрий Эдуардович, Кузнецов Евгений Владимирович
МПК: F02D 1/00, F02D 28/00, F02D 33/00...
Метки: двигателем, управления, автоматического, система
Текст:
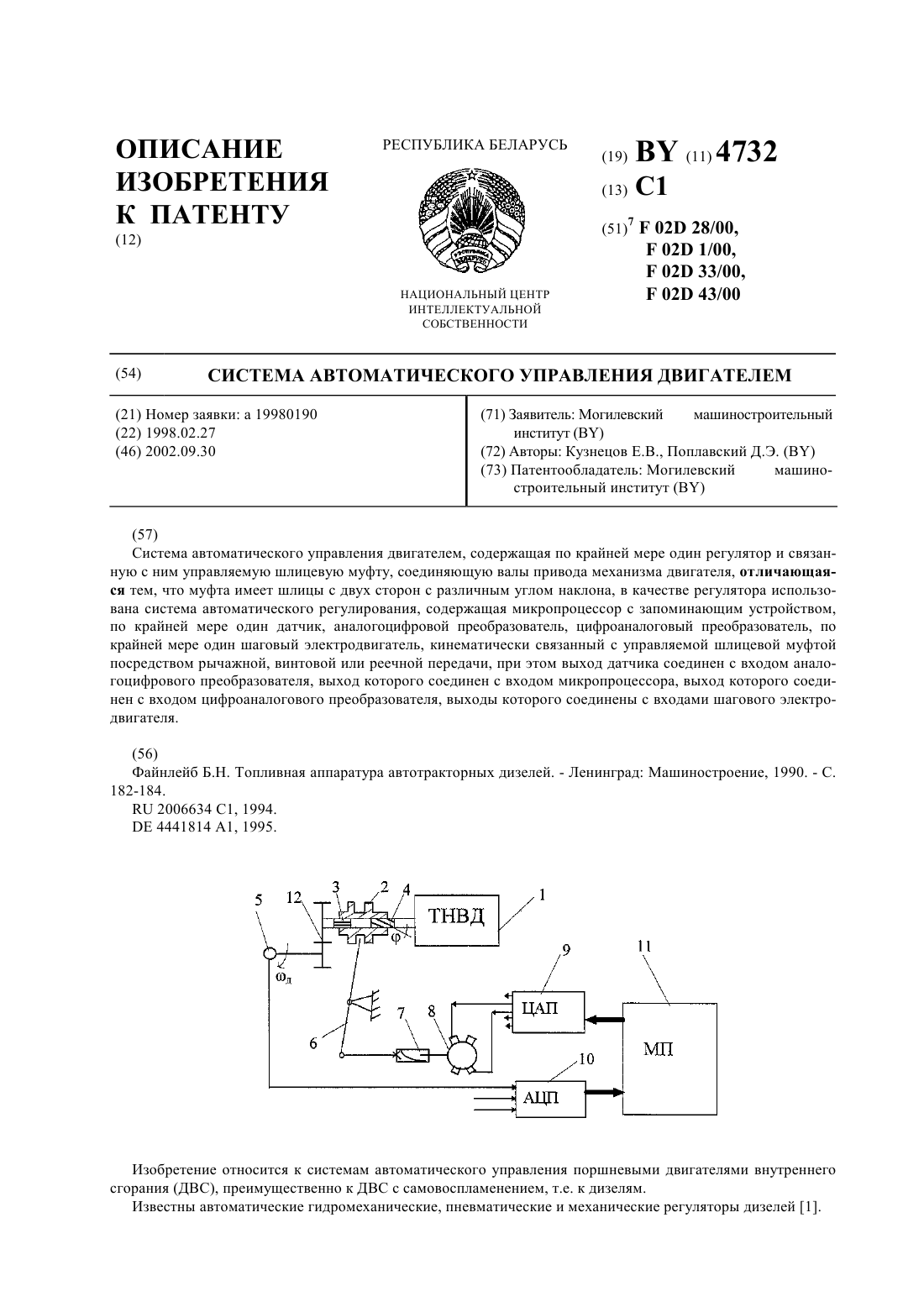
...регулятора использована система автоматического регулирования, содержащая микропроцессор с запоминающим устройством, по крайней мере, один датчик, аналогоцифровой преобразователь,цифроаналоговый преобразователь, по крайней мере один шаговый электродвигатель, кинематически связанный с управляемой шлицевой муфтой посредством рычажной, винтовой или реечной передачей, при этом выход датчика соединен с входом аналогоцифрового преобразователя,...
Следящая система автоматического управления с компенсацией неизмеряемых скачкообразных возмущений
Номер патента: U 1002
Опубликовано: 30.09.2003
Авторы: Ганэ Вадим Арведович, Мацкевич Артур Николаевич
МПК: G05B 11/01
Метки: система, компенсацией, управления, возмущений, автоматического, скачкообразных, следящая, неизмеряемых
Текст:
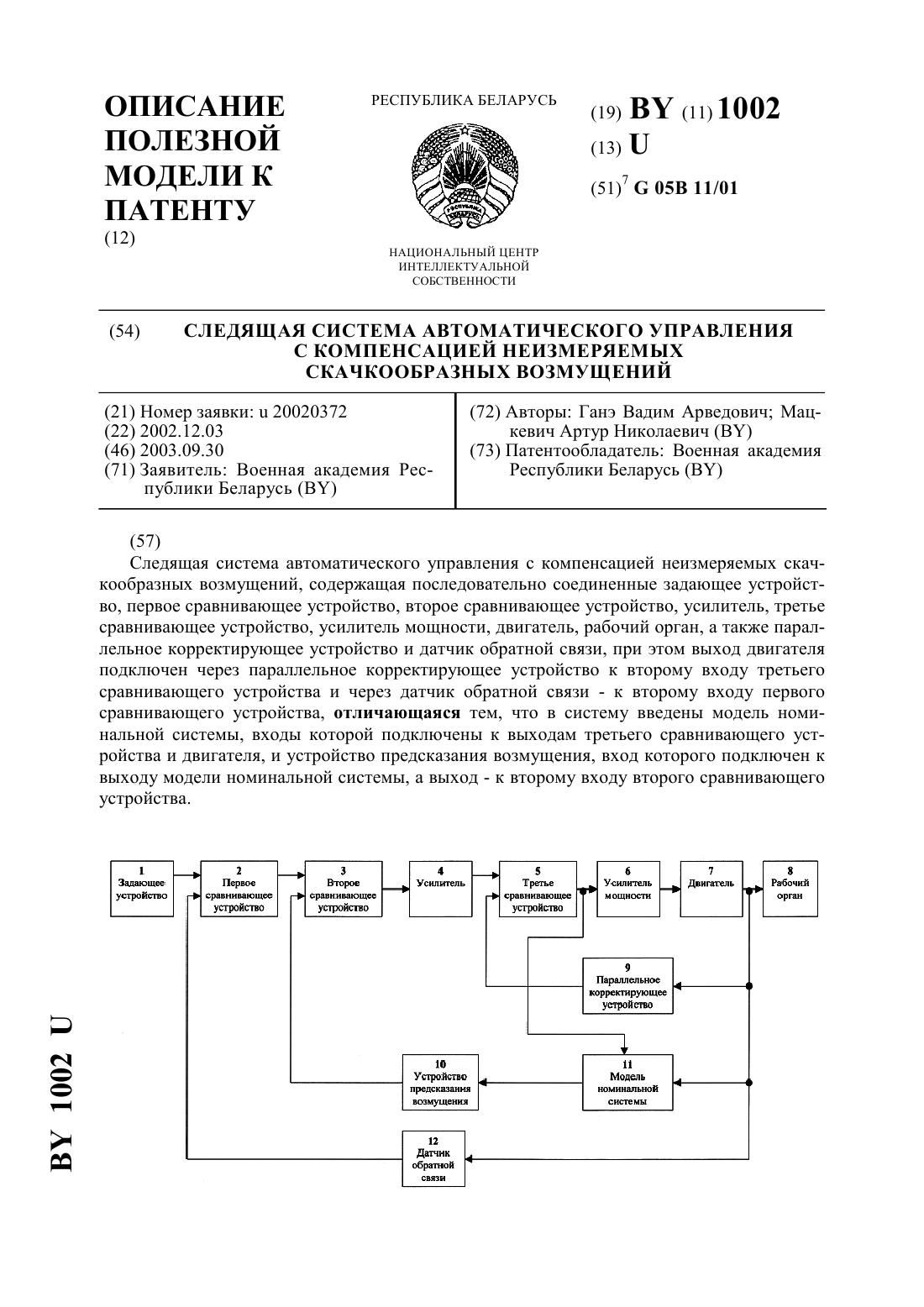
...второму входу первого сравнивающего устройства, и отличается от прототипа тем, что в систему введены модель номинальной системы, входы которой подключены к выходам третьего сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу второго сравнивающего устройства. На фигуре представлена функциональная схема ССАУ с компенсацией неизмеряемых...
Предыдущий патент: Расположение детали прибора
Следующий патент: Способ В. С. Кубая пульсовой диагностики и лечения средствами рефлексотерапии
Случайный патент: Движитель транспортного средства повышенной проходимости