Система автоматического управления
Текст
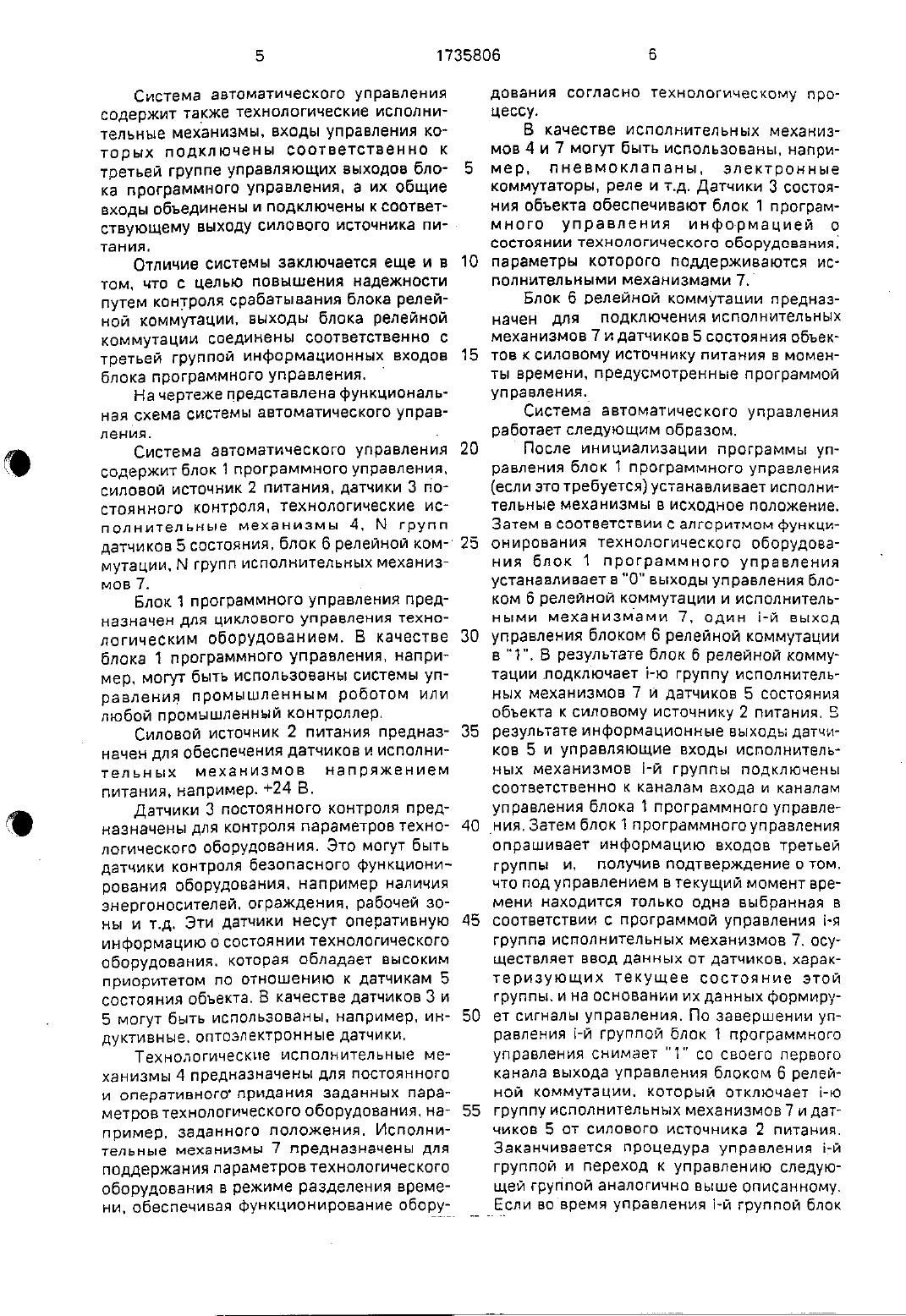
гнстеиеоедн в РЕСПУБЛИНЕ РУСЬ гъытент не а 5СОЮЗ СОВЕТСКИХ СОЦИАЛ ИСТИЧЕСКИХ Р ЕСПУБЛИКГОСУДАРСТВЕННЫЙ КОМИТЕТ по ИЗОБРЕТЕНИЯМ И открытиям(56) Микропроцессорная система контроля датчиков зажигания. Мэткропроцессорньае средства и системы. 1989. М 3, с.б 3-64.(57) Изобретение относится к автоматике и вькчислительнои технике и может быть использовано. например. в системах автоматического управления робототехнологическими комплексами. Система автоматического управления содержит блок 1 Программного управления. силовой источник 2 питания. п датчиков 3 постоянного контроля. технологические ИСПОдНИТельные механизмы д. М объектов 5 управления. С целью упрощения технической реализации системы и уменьшения ее энергоемкости в систему введены блок 6 регпеиного коммутатора и новые связи. Госле инициализации программы Блок 1 ПЭШраммного управления устанавливает ИСПОЛНИТЕЛЬНЫЕ МВХЭНИЗМЬЪ В ИСХОДНОЕ ПО ложение. Блок 6 реле-иного коммутатора подключает 2-й объект 5 управления к силовому источнику 2 питания. На основе ПОЛученньах от объекта управления и от датчиков 3 данных блок 1 программного упВЗБЛЕНЪЪЧ Формирует сигналы управления исполнительными механизмами. 3 з.п. ф-льл. 1 ил.Изобретение относится к автоматике и вычислительной технике и может быть использовано. например. в системах автомаТИЧВСКОГО УПОЭВЛВНИЯ ПОБОТОТЕХНОЛОГИЧВС кими комплексами.Известна система автоматического управления, содержащая блок программного управления, силовой источник питания, М объектов управления. информационные выходы которых подключены к индивидуальным каналам ввода, а их управляющие входы подключены к индивидуальным каналам вывода блока программного управлеНИЯ,Известна система автоматического управления. содержащая блок программного управления. промышленный контроллер. силовой источник питания. п датчиков. подключенные к л входам блока программного УППЭБЛНИЙ. К т ВЫХОДЭМ КОТОРОГО ПОДКЛЮ ЧЕНЫ ГП ИСПОЛНИТЕЛЬНЫХ МеХЕНИЗМОВ.НЭДОСТЭТКОМ ИЗВЕСТНЫХ СИСТЕМ ЯВЛЯ 6 Тся сложность технической реализации. большая энергоемкость Системы. Объясняется это тем, что в основу построения указанных систем управления положен способ индивидуального управления исполнительными механизмами, в связи с этим число каналов входа выхода блока программного управления равно числу датчиков и исполнительных механизмов. Для обеспечения управления технологическим оборудованием. которое имеет число датчиков и исполнительных механизмов большее. чем имеет каналов входа выхода блок программного управления. используют дополнитепьно промышленный контроллер или новый. более сложный блок программ ного управления с большим числом каналов входа выхода. Все датчики и исполнительные механизмы постоянно подключены к силовому источнику питания, несмотря на то. что по производственному циклу многие из них длительное время находятся в режиме ожидания работы.Наиболее близкой к изобретению является система автоматического управления. содержащая блок программного управления. М групп датчиков состояния объекта. выходы которых соответственно подключены к группе из М информационных входов блока программного управлениялервая группа из л управляющих выходов которого соединена с соответствующими л входами управления М групп исполнительных механизмов, первый и второй потенциальные ВЫХОДЫ СИЛОВОГО ИСТОЧНИКЗ ПИТЗНИЯ ПОД КЛЮЧЕНЫ К СООТВЕТСТВУЮЩИМ ВХОДЭМ ПИТЭния блока программного управления.Недостатком данной системы является сложность технической реализации. больШЭЯ энергоемкость СИСТЕМЫ.Объясняется это тем, что для связи блока Программного управления с объектом управления требуются сложные логические устройства, реализующие алгоритм информационного обмена. Кроме того, все датчики СОСТОЯНИЯ ОЪЭКТОВ И ИСПОЛНИТЕЛЬНЫЕ механизмы постоянно подключены к силовому источнику питания. даже если согласНО алгоритму функционирования ОООРУДОУВЗНИЯ ОНИ НЭХОДЯТСЯ В режиме ОЖИДЭНИЯЦель изобретения уп рощение и уменьшение энергоемкости системы.Цель достигается тем, что в систему автоматического управления. содержаЩУЮ блок программного управления. М групп датчиков состояния объекта. выходы которых соответственно подключены к группе из М информационных входов блока программного управления. первая группа из п управляющих выходов которого соединена а СООТВЕТСТВУЮЩИМИ П ВХОДЭМИ ВКЛЮЧЕНИЯ М групп исполнительных механизмов. первый и второй потенциальные выходы силового источника питания подключены к соответствующим входам питания блока программного управления, в нее введен блок релейной коммутации из М реле. содержащих каждое первую и вторую пары замыкающих контактов. причем первые выводы обмоток реле блока релейной коммутации подключены соответственно к второй группе из М управляющихвыходов блока программного управления, а вторые выводы обмоток реле СОВДИНВНЫ С СООТВЗТСТВуЮЩИМ первым ПОтенциальным выходом силового ИСТОЧНИКЭ питания и с первыми контактами первых замыкающих пар контактов М реле. второй потенциальный выход силового источника питания соединен с первыми контактами вторых замыкающих пар контактов реле. вторые КОНТаКТЫ первых И ЭТОВЫХ пар замыкающих контактов реле являются выходами блока релейной коммутации и подключены к входам питания соответствующей ГРУППЫ датчиков состояния объекта, общие входы исполнительных механизмов в группе соединены и подключены к соответствующему второмужонтакту первой или второй пары замыкающих контактов реле.Кроме того. система содержит датчики постоянного контроля. выходы которых Подключены соответственно к второй группе информационных входов блока программного управления, а их входы питания соеди НВНЫ С ПОТВНЦИЭЛЬНЫМИ ВЫХОДЭМИ СИЛОВОГОСистема автоматического управления содержит также технологические исполнительные механизмы. входы управления которых подключены СООТВВТСТВВННО К третьей группе управляющих выходов блока программного управления. а их общие входы объединены и подключены к соответствующему выходу силового источника пиТВНИЯ.Отличие системы заключается еще и в том, что с целью повышения надежности путем контроля срабатывания блока релейной коммутации. выходы блока релейной коммутации соединены соответственно с третьей группой информационных входов блока программного управления.На чертеже представлена функционал ьная схема системы автоматического управпения. Система автоматического улравлени содержит блок 1 программного управления. силовой источник 2 питания. датчики 3 постоянного контроля. технологические исПОЛНИТВЛЬНЫЕ МЭХЭНИЗМЫ 4, М групп датчиков 5 состояния. блок 6 релейной коммутации. М групп исполнительных механизмов 7.Блок 1 программного управления предНазначен для цихлового управления технологическим оборудованием. В качестве блока 1 программного управления. например, могут быть использованы системы управления промышленным роботом или любой промышленный контроллер.силовой источник 2 питания предназначен для обеспечения датчиков и исполнительных механизмов напряжением питания. например. 24 В.Датчики 3 постоянного контроля предназначены для контроля параметров технологического оборудования. Это могут быть датчики контроля безопасного функционирезания оборудования. например НЭЛИЧИЯ энергоносителей. ограждения. ОЭбОЧБЙ 30 Ы и тд эти датчики несут оперативную информацию о состоянии технологического оборудования. которая обладает высоким приоритетом по отношению к датчикам 5 состояния объекта. В качестве датчиков 3 и 5 могут быть использованы. например. индуктивные. оптоэлектронные датчики.Технологические исполнительные механизмы 4 предназначены для постоянного И ОПЭрЭТЪ/ЧВНОГО придания ЗЭДЗННЫХ параметров технологического оборудования. например. заданного положения. Исполнительные механизмы 7 предназначены для поддержания параметров технологического Обдрудования в режиме разделения времени, обеспечивая Функционирование обоРУДОЕЭНИЯ СОГЛЭСНО технологическому процессу.В качестве исполнительных механизмов 4 и 7 могут быть использованы. например. пневмоклапаны. электронные коммутаторы. реле и т.д. Датчики 3 состояния объекта обеспечивают блок 1 программного управления инфо-рмацией о состоянии технологического оборудования параметры которого поддерживаются исполнительными механизмами 7.Блок 6 релейной коммутации предназначен для подключения исполнительных механизмов 7 и датчиков 5 состояния объектов к силовому источнику питания в моменты времени, предусмотренные программой управления.Система автоматического управления работает следующим образом, с После инициализации программы управления блок 1 программного управления(если это требуется) устанавливает исполнительные механизмы в исходное положение. Затем в соответствии с алгоритмом функционирования технологического оборудования блок 1 программного управления устанавливает а О выходы управления блоком 6 релейной коммутации и исполнительными механизмами 7, один 1-й выход управления блоком 6 релейной коммутации вВ результате блок б релейной коммутации подключает 1-ю группу исполнительных механизмов 7 и датчиков 5 состояния объекта к силовому источнику 2 питания. З результате информационные выходы датчиков 5 и управляющие входы исполнительных механизмов 1-й группы подключены соответственно к каналам входа и каналам управления блока Е программного управлеуния. Затем блок 1 программного управления опрашивает информацию входов третьей группы и. получив подтверждение о том. что под управлением в текущий момент времени находится только одна выбранная в соответствии с программой управления 1-я группа исполнительных механизмов 7. осуществляет ввод данных от датчиков. характеризующих текущее состояние этой группы. и на основании их данных формирует сигналы управления. По завершении управления 1-й группой блок 1 программного управления снимает 1 со своего первого канала выхода управления блоком 6 релейной коммутации. который отключает 1-ю группу исполнительных механизмов 7 и датчиков 5 от силового источника 2 питания. Заканчивается процедура управления Е-й группой и переход к управлению следующей группой аналогично выше описанному. Если во время управления 1-й группой блокт программного управления получает данные от датчиков З постоянного контроля. например. о нарушении подачи пневмопитания. то система переходит на программу управления аварийной ситуацией.Использование предложенной системы позволит упростить ее реализацию и уменьШИТЬ ЭНЕрГОЭМКОСТЬ за СЧЕТ ПОДКЛЮЧЕНИЯ большего количества датчиков и исполнительных механизмов к каналам входа выхода блока программного управления и подключения датчиков и исполнительных механизмов к силовому источнику питания в моменты времени. предусмотренные алгоритмом функционирования технологического оборудования.1. Система автоматического управления, содержащая блок программного управпения. М групп датчиков состояния объекта. ВЫХОДЫ КОТОПЫХ СООТВВТСТВВННО ПОДКЛЮЧЕны к грУПпе из М информационных входов блока программного управления. первая группа иа п управляющих выходов которого СОЗДИНЕНЭ С СООТВЕТСТВУЮЩИМИ П ЭХОДЗМИ включения М групп исполнительных механизмов. первый и второй потенциальные ВЫХОДЫ СИЛОВОГО источника ПИТЭНИЯ ПОД ключены к соответствующим входам пита 5ния блока Программного управления. о т л и-30ч а ю щ а я с я тем. что. с целью упрощения и уменьшения энергоемкости системы, в нее введен блок релейной коммутации из М реле. содержащих каждое первую и вторую пары замыкающих контактов. причем первые выводы обмоток реле блока релейной коммутации подключены соответственно к второй группе из М управляющих выходов блока программного управления. а вторые выводы Обмотки реле соединены с соответ 35ствующим первым потенциальным выходом силового источника питания и с первыми контактами первых замыкающих пар контактов реле. второй потенциальный выход силового источника питания соединен с первыми контактами вторых замыкающих пар контактов реле. вторые контакты перЭЫХ И ВТОрЫХ пар ЗЭМЫКЭЮЩИХ КОНТЗКТОВ реле являются выходами блока релейной коммутации и подключены к входам питания соответствующей группы датчиков состояния объекта, общие входы исполнительных механизмов в группе соединены и ПОДКЛЮЧЭНЫ К соответствующему второму контакту первой или второй пары замыкаю ЩИХ КОНТЗКТОВ ПЕЛЕ.2.Системапоп. отличающаяся ТЕМ, ЧТО ОНЭ содержит ДЭТЧИКИ ПОСТОЯННОГО контроля. выходы которых подключены соответственно к второй группе инфорМаЦИ онных входов, блока программного управления а их входы питания соединены С ПОТЗНЦИЗПЬНЬПМИ ВЫХОДЗМИ СИЛОВОГО ИС точника питания, З. Система по п. Ъотличающаяоя тем. что она содержит технологические исполнительные механизмы. входы включеНИЯ которых ПОДКПЮЧЕНЫ соответственно К третьей группе управляющих выходов блока программного управления. а их общие входы объединены и подключены к соответстВУЮЩеМу выходу силового источника питания.4. Система по п. Ъотличающаяся тем. что. с целью повышения надежности путем контроля срабатывания блока релейной коммутации, выходы блока релейной коммутации соединены соответственно с третьей группой информационных входов блока программного управления.ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035. Москва, Ж-ЗБ. Раушская наб 4/5
МПК / Метки
МПК: G05B 19/00
Метки: управления, автоматического, система
Код ссылки
<a href="https://by.patents.su/4-27-sistema-avtomaticheskogo-upravleniya.html" rel="bookmark" title="База патентов Беларуси">Система автоматического управления</a>
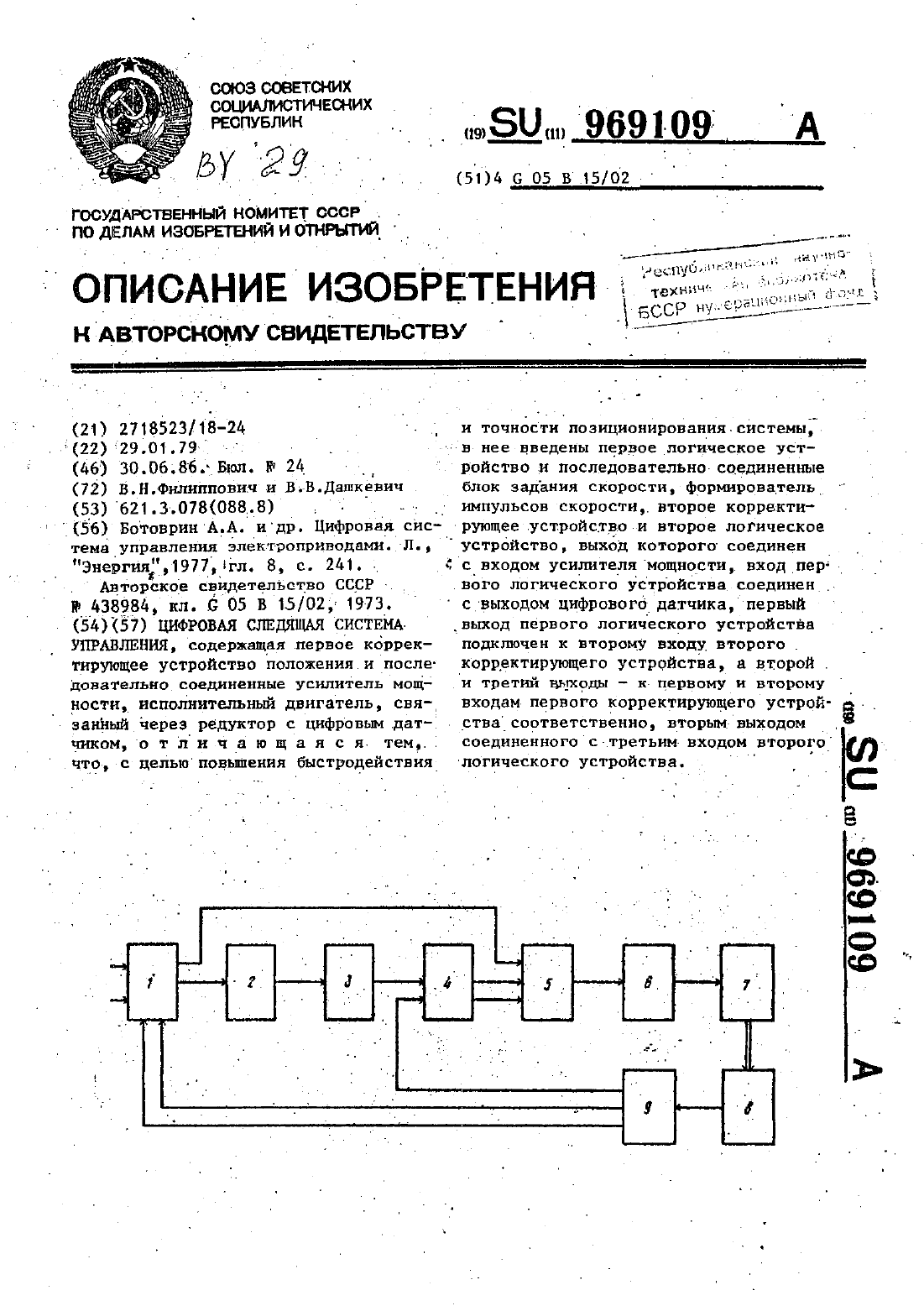
Цифровая следящая система управления
Номер патента: 29
Опубликовано: 30.05.1994
Авторы: Филиппович Валерий Николаевич, Дашкевич В. В.
МПК: G05B 15/02
Метки: цифровая, система, следящая, управления
Текст:
...0 Устройства,И Третий выходы к первому и второму входам первого корректирующего УСТРФЙСТВН соответственно, втдрм-выходом соединенного с третьим входом,второго логического устройства.Такое решение позволит повысить 5 ЫСТрОдЕйствие-и точность позиционирования системы.На чертеже-изображена блоксхема предлагаемой цифровой следящей систет мы управления.Система состоит из последовательно соединенньш первого корректируюЩегоустройства 1,...
Предыдущий патент: Способ моделирования повышенной противогипоксической резистентности
Следующий патент: Способ получения сухого продукта из молочной сыворотки
Случайный патент: Растительно-минеральная пищевая добавка