Способ адаптивного автоматического управления тягово-скоростными режимами движения мобильной машины с дизельным двигателем и гидромеханической передачей
Номер патента: 11676
Опубликовано: 28.02.2009
Авторы: Дычкин Иван Михайлович, Пузанова Ольга Владимировна, Плякин Роман Владимирович, Тарасик Владимир Петрович
Текст
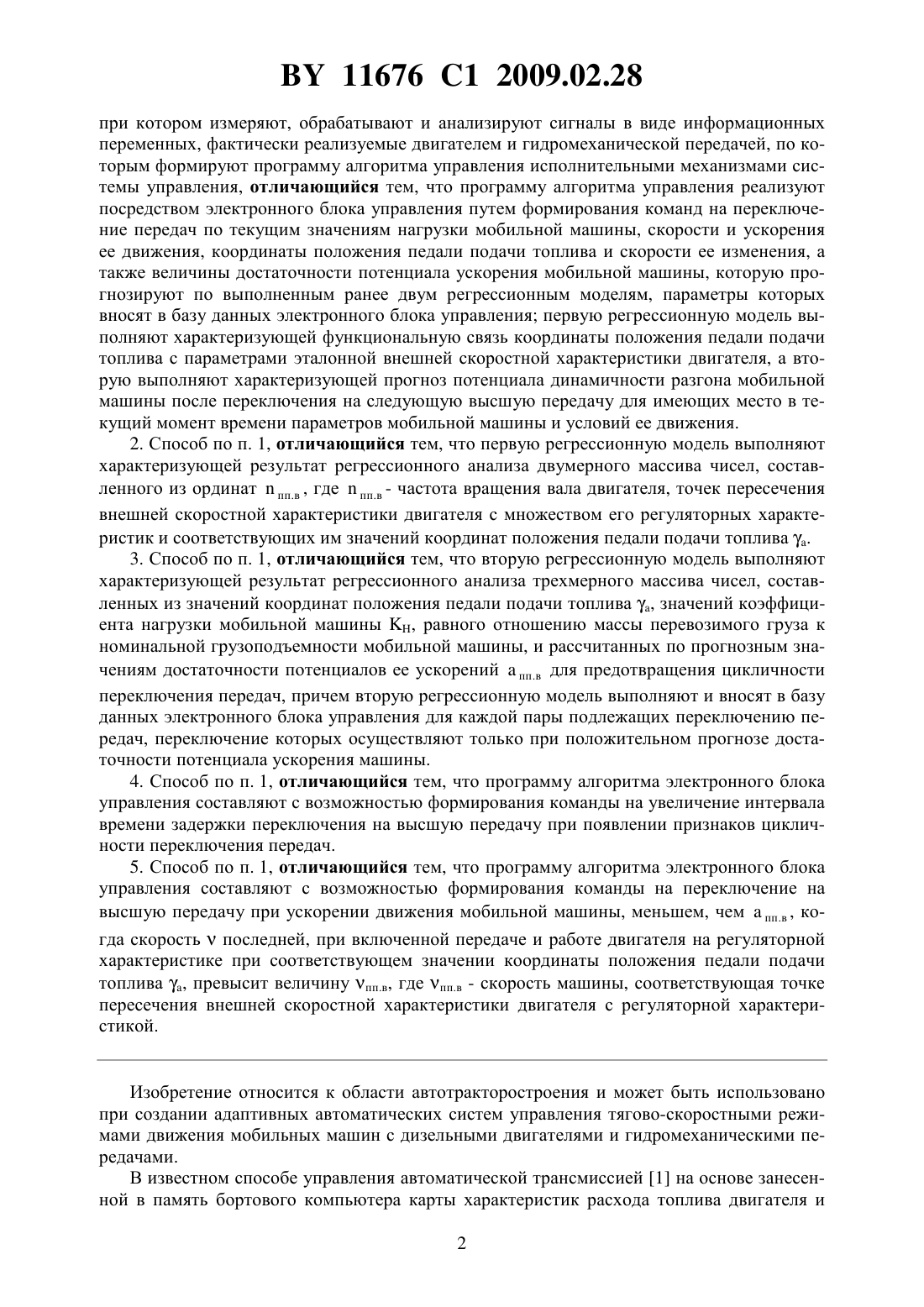
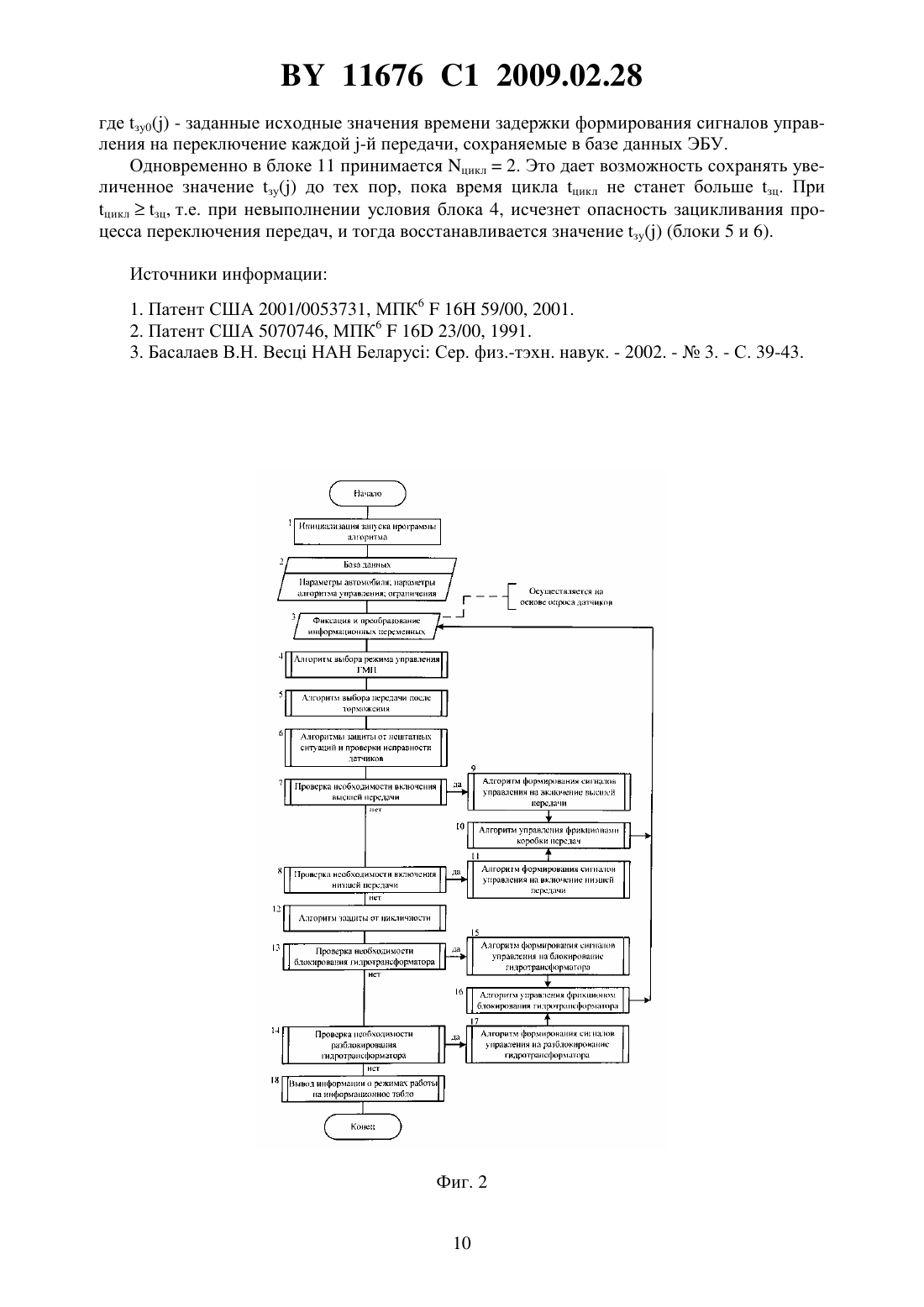
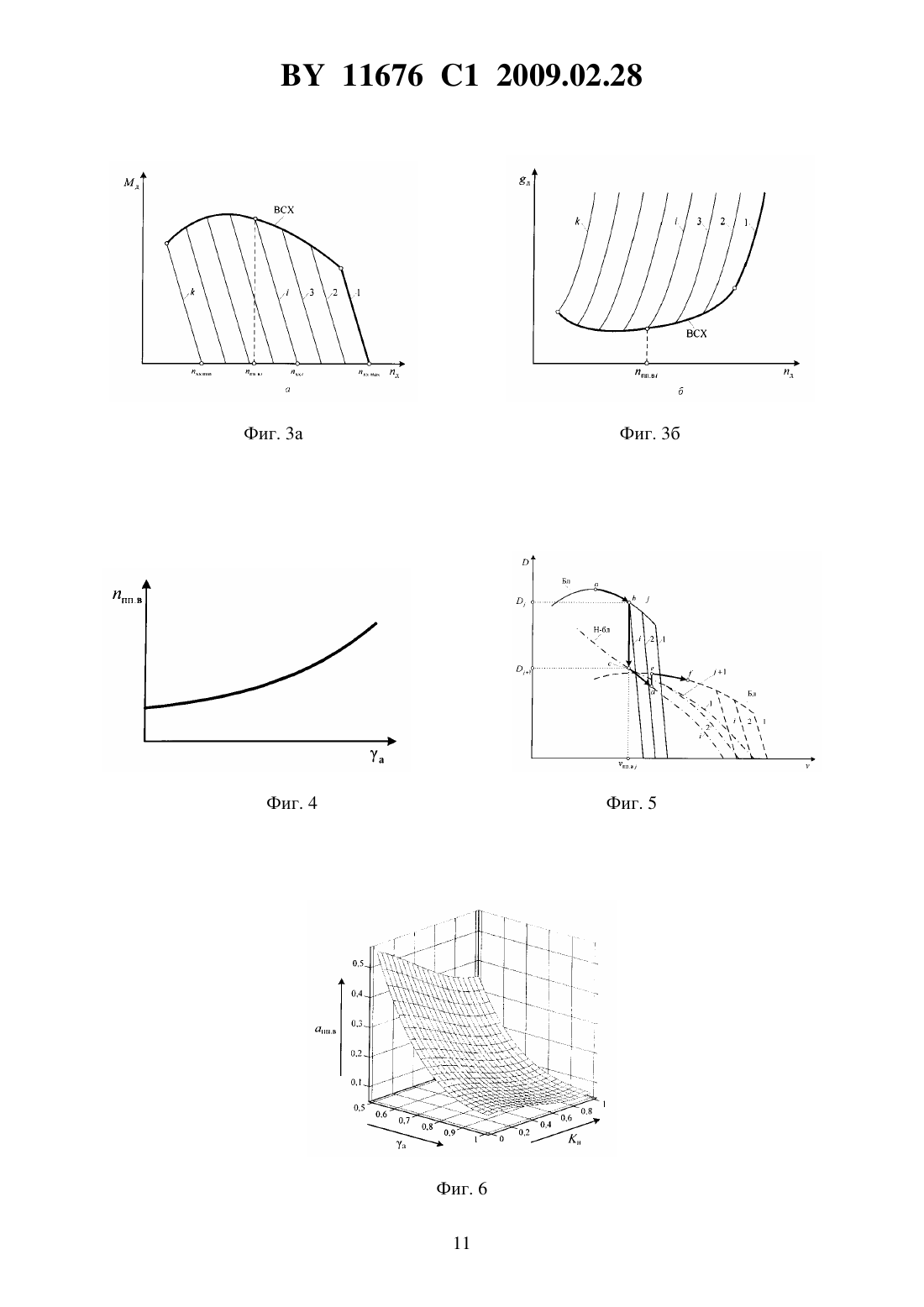
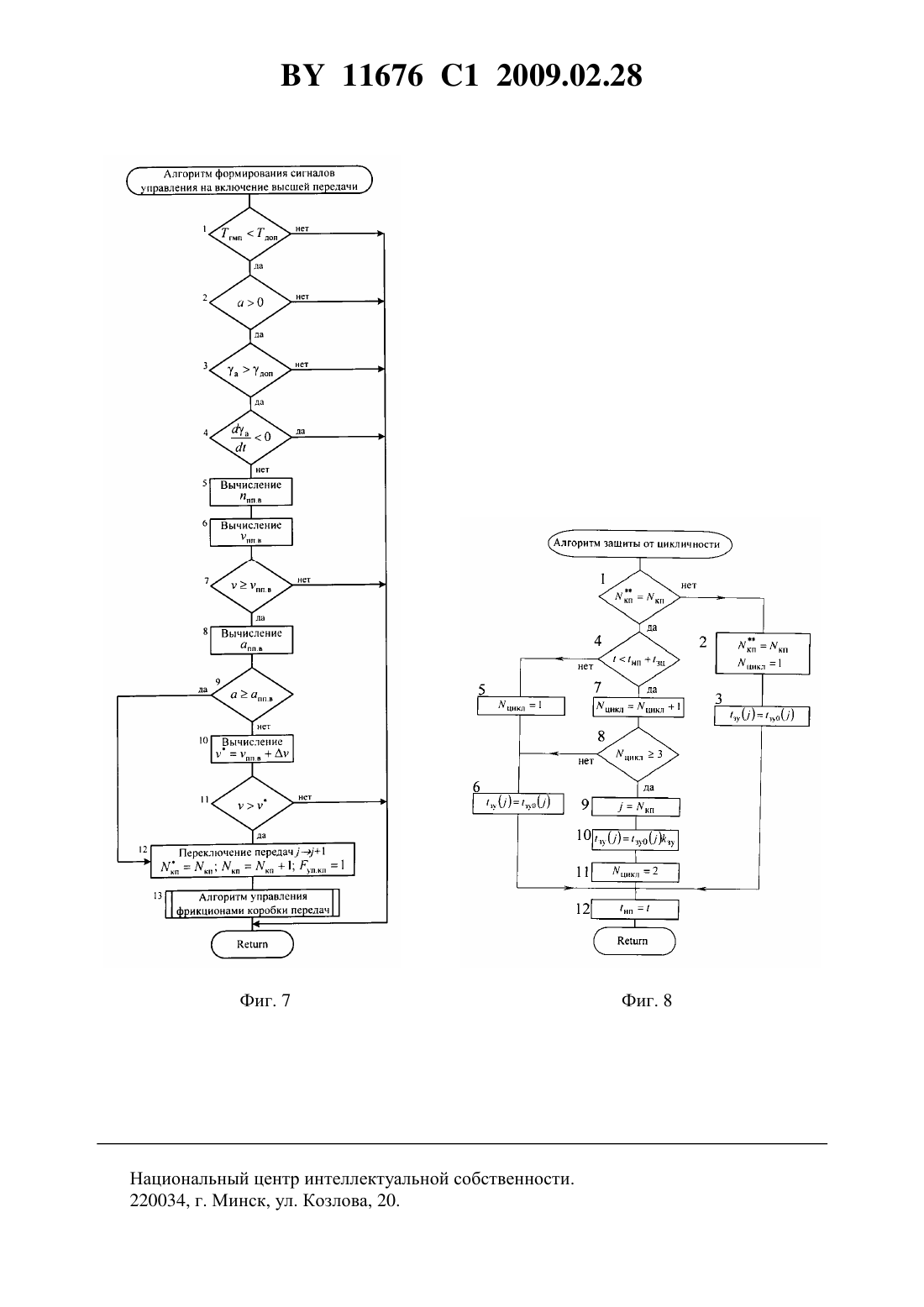
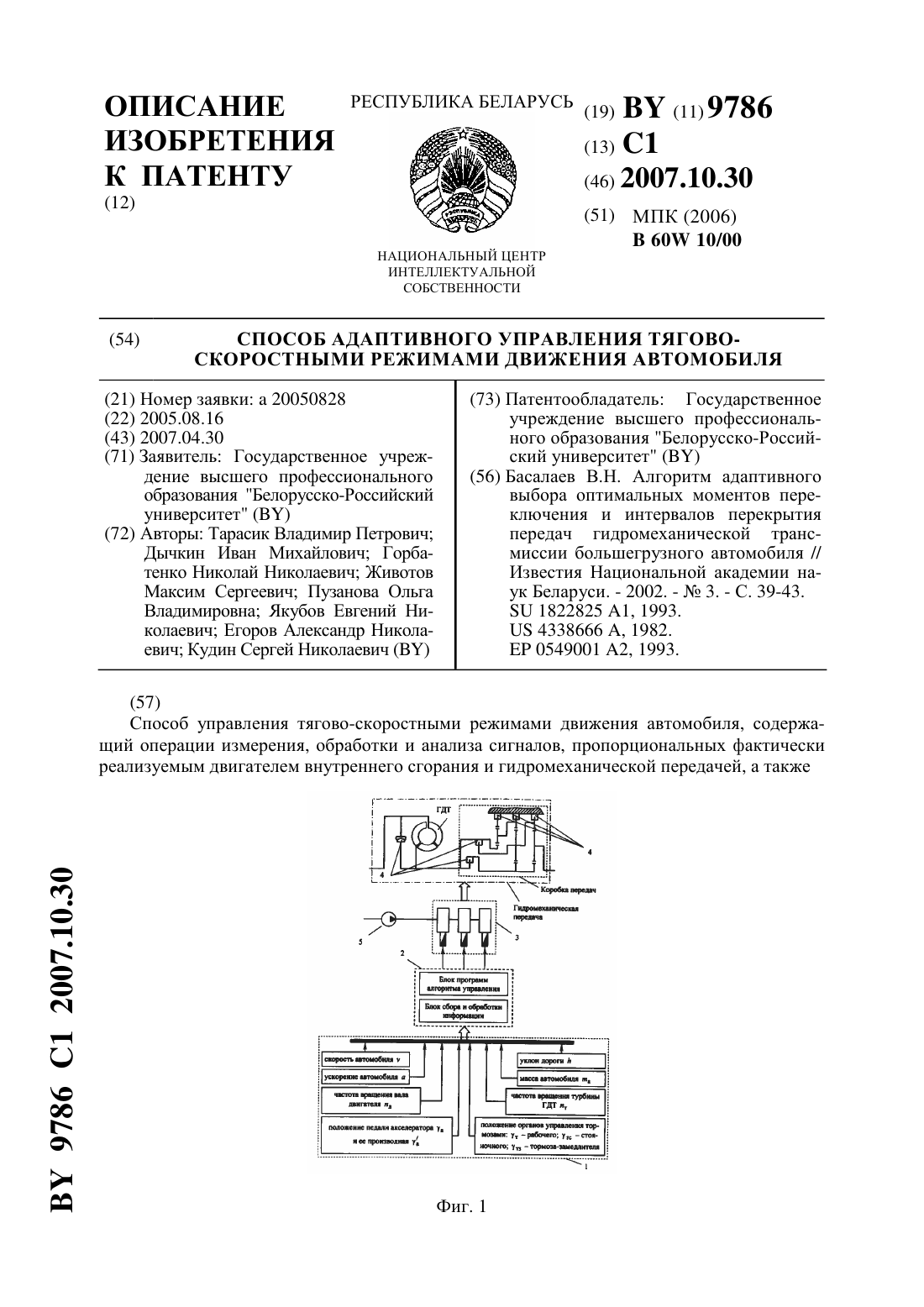
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ АДАПТИВНОГО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЯГОВО-СКОРОСТНЫМИ РЕЖИМАМИ ДВИЖЕНИЯ МОБИЛЬНОЙ МАШИНЫ С ДИЗЕЛЬНЫМ ДВИГАТЕЛЕМ И ГИДРОМЕХАНИЧЕСКОЙ ПЕРЕДАЧЕЙ(71) Заявитель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(72) Авторы Тарасик Владимир Петрович Дычкин Иван Михайлович Пузанова Ольга Владимировна Плякин Роман Владимирович(73) Патентообладатель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(56) БАСАЛАЕВ В.Н. Известия Национальной академии наук Беларуси. - 2002.3. - С. 39-43.7330 1, 2005.9142 1, 2007.1118821 , 1984.1383659 1, 1995.867710, 1981.(57) 1. Способ адаптивного автоматического управления тягово-скоростными режимами движения мобильной машины с дизельным двигателем и гидромеханической передачей, Фиг. 1 11676 1 2009.02.28 при котором измеряют, обрабатывают и анализируют сигналы в виде информационных переменных, фактически реализуемые двигателем и гидромеханической передачей, по которым формируют программу алгоритма управления исполнительными механизмами системы управления, отличающийся тем, что программу алгоритма управления реализуют посредством электронного блока управления путем формирования команд на переключение передач по текущим значениям нагрузки мобильной машины, скорости и ускорения ее движения, координаты положения педали подачи топлива и скорости ее изменения, а также величины достаточности потенциала ускорения мобильной машины, которую прогнозируют по выполненным ранее двум регрессионным моделям, параметры которых вносят в базу данных электронного блока управления первую регрессионную модель выполняют характеризующей функциональную связь координаты положения педали подачи топлива с параметрами эталонной внешней скоростной характеристики двигателя, а вторую выполняют характеризующей прогноз потенциала динамичности разгона мобильной машины после переключения на следующую высшую передачу для имеющих место в текущий момент времени параметров мобильной машины и условий ее движения. 2. Способ по п. 1, отличающийся тем, что первую регрессионную модель выполняют характеризующей результат регрессионного анализа двумерного массива чисел, составленного из ординатпп.в , гдепп.в - частота вращения вала двигателя, точек пересечения внешней скоростной характеристики двигателя с множеством его регуляторных характеристик и соответствующих им значений координат положения педали подачи топлива . 3. Способ по п. 1, отличающийся тем, что вторую регрессионную модель выполняют характеризующей результат регрессионного анализа трехмерного массива чисел, составленных из значений координат положения педали подачи топлива , значений коэффициента нагрузки мобильной машины , равного отношению массы перевозимого груза к номинальной грузоподъемности мобильной машины, и рассчитанных по прогнозным значениям достаточности потенциалов ее ускоренийпп.в для предотвращения цикличности переключения передач, причем вторую регрессионную модель выполняют и вносят в базу данных электронного блока управления для каждой пары подлежащих переключению передач, переключение которых осуществляют только при положительном прогнозе достаточности потенциала ускорения машины. 4. Способ по п. 1, отличающийся тем, что программу алгоритма электронного блока управления составляют с возможностью формирования команды на увеличение интервала времени задержки переключения на высшую передачу при появлении признаков цикличности переключения передач. 5. Способ по п. 1, отличающийся тем, что программу алгоритма электронного блока управления составляют с возможностью формирования команды на переключение на высшую передачу при ускорении движения мобильной машины, меньшем, чемпп.в , когда скоростьпоследней, при включенной передаче и работе двигателя на регуляторной характеристике при соответствующем значении координаты положения педали подачи топлива , превысит величину пп.в, где пп.в - скорость машины, соответствующая точке пересечения внешней скоростной характеристики двигателя с регуляторной характеристикой. Изобретение относится к области автотракторостроения и может быть использовано при создании адаптивных автоматических систем управления тягово-скоростными режимами движения мобильных машин с дизельными двигателями и гидромеханическими передачами. В известном способе управления автоматической трансмиссией 1 на основе занесенной в память бортового компьютера карты характеристик расхода топлива двигателя и 2 11676 1 2009.02.28 измерения параметров движения автомобиля вычисляют текущую величину расхода топлива при движении на включенной передаче, а также на предназначенной для включения смежной высшей передаче, сравнивают полученные значения и при расходе топлива на высшей передаче меньшем, чем на включенной передаче, бортовой компьютер вырабатывает и передает исполнительным механизмам команду на включение высшей передачи. Недостатком этого способа является возможность существенных различий в характеристиках заложенной в память компьютера карты расхода топлива и имеющим место действительным расходам топлива в данный момент времени вследствие изменения технического состояния двигателя, его температурного режима, условий эксплуатации машины и других факторов. Известный способ управления тягово-скоростным режимом движения автомобиля 2 содержит в качестве информационных параметров измеряемые в процессе движения положение педали подачи топлива и скорость автомобиля, текущие значения которых сопоставляются с заранее заданными контрольными их значениями, при которых контроллер системы управления вырабатывает команды на переключение передач. В дополнение к этому на основе измеряемых параметров теплового режима трансмиссии и скольжения фрикционных дисков контроллер рассчитывает совокупную тепловую энергию, при превышении предельных значений которой переключение передач осуществляется не по основной, а по специальной щадящей программе, ограничивающей частоту переключения и тем самым способствующей снижению теплонапряженности трансмиссии. Наиболее близким к предложенному является известный способ адаптивного переключения передач гидромеханической трансмиссии большегрузного автомобиля 3. Способ содержит операции измерения, анализа и использования для расчета оптимальных моментов переключения передач сигналов, пропорциональных действующим в двигателе и трансмиссии. Кроме того, в память бортового компьютера занесены характеристики двигателя, гидротрансформатора, кинематические характеристики трансмиссии, закономерности изменения давления во включаемом и выключаемом фрикционах и другие функциональные зависимости, позволяющие установить параметры движения автомобиля. В качестве третьей координаты при выборе динамических моментов переключения передач служит ускорение автомобиля, получаемое на включенной передаче , и ускорение на следующей повышающей передаче 1, рассчитываемые бортовым компьютером по рекомендованной автором формуле. При этом если ускорение на высшей передаче 10, то проверяется условие 1, и при его выполнении осуществляется переключение на высшую передачу. Предполагается, что благодаря перекрытию включаемого и выключаемого фрикционов обеспечивается движение автомобиля без снижения скорости за время переключения передач. Однако в действительности переключение передач всегда сопровождается некоторым падением скорости. Поэтому фактическое ускорение машины на высшей передаче будет отличаться от рассчитанного по предложенной автором формуле, и условие равенства ускорений 1 не будет выполнено. Задачей, решаемой изобретением, является создание способа адаптивного автоматического управления тягово-скоростными режимами движения мобильной машины с дизельным двигателем и гидромеханической передачей, повышающего ее эксплуатационные свойства производительность, экономичность, надежность функционирования системы управления, комфортабельность и безопасность машины. Поставленная задача решается тем, что в способе адаптивного автоматического управления тягово-скоростными режимами движения мобильной машины с дизельным двигателем и гидромеханической передачей, при котором измеряют, обрабатывают и анализируют сигналы в виде информационных переменных, фактически реализуемые двигателем и гидромеханической передачей, по которым формируют программу алгоритма управления исполнительными механизмами системы управления, согласно изобретению, про 3 11676 1 2009.02.28 грамму алгоритма управления реализуют посредством электронного блока управления путем формирования команд на переключение передач по текущим значениям нагрузки мобильной машины, скорости и ускорения ее движения, координаты положения педали подачи топлива и скорости ее изменения, а также величины достаточности потенциала ускорения мобильной машины, которую прогнозируют по выполненным ранее двум регрессионным моделям, параметры которых вносят в базу данных электронного блока управления первую регрессионную модель выполняют характеризующей функциональную связь координаты положения педали подачи топлива с параметрами эталонной внешней скоростной характеристики двигателя, а вторую выполняют характеризующей прогноз потенциала динамичности разгона мобильной машины после переключения на следующую высшую передачу для имеющих место в текущий момент времени параметров мобильной машины и условий ее движения. Первую регрессионную модель выполняют характеризующей результат регрессионного анализа двумерного массива чисел,составленного из ординат пп.в, где пп.в - частота вращения вала двигателя, точек пересечения внешней скоростной характеристики двигателя с множеством его регуляторных характеристик и соответствующих им значений координат положения педали подачи топлива а. Вторую регрессионную модель выполняют характеризующей результат регрессионного анализа трехмерного массива чисел, составленных из значений координат положения педали подачи топлива а, значений коэффициента нагрузки мобильной машины , равного отношению массы перевозимого груза к номинальной грузоподъемности мобильной машины, и рассчитанных по прогнозным значениям достаточности потенциалов ее ускорений пп.в для предотвращения цикличности переключения передач, причем вторую регрессионную модель выполняют и вносят в базу данных электронного блока управления для каждой пары подлежащих переключению передач, переключение которых осуществляют только при положительном прогнозе достаточности потенциала ускорения машины. Программу алгоритма электронного блока управления составляют с возможностью формирования команды на увеличение интервала времени задержки переключения на высшую передачу при появлении признаков цикличности переключения передач. Программу алгоритма электронного блока управления составляют с возможностью формирования команды на переключение на высшую передачу при ускорении движения мобильной машины, меньшем, чем пп.в, когда скоростьпоследней, при включенной передаче и работе двигателя на регуляторной характеристике при соответствующем значении координаты положения педали подачи топлива а, превысит величину пп.в, где пп.в скорость машины, соответствующая точке пересечения внешней скоростной характеристики двигателя с регуляторной характеристикой. Сущность изобретения поясняется чертежами. На фиг. 1 приведена структурная схема системы управления гидромеханической передачей на фиг. 2 - схема алгоритма формирования сигналов управления на переключение передач и блокирование гидротрансформаторов на фиг. 3 - характеристики дизельного двигателя с электронным всережимным регулятором на фиг. 4 - регрессионная зависимость между параметрами эталонной внешней скоростной характеристики двигателя и координатой положения педали подачи топлива на фиг. 5 - схема определения значений динамического фактора машины на смежных передачах на фиг. 6 - график регрессионной зависимости между а,и пп.в на фиг. 7 - схема алгоритма формирования сигналов управления на включение высшей передачи на фиг. 8 - схема алгоритма защиты от цикличности переключения передач. Система автоматического управления гидромеханической передачей (САУ ГМП) мобильной машины состоит из следующих элементов (фиг. 1) системы датчиков 1 для сбора информации электронного блока управления (ЭБУ) 2 исполнительных механизмов 3 САУ ГМП гидравлических цилиндров включения фрикционов 4 ГМП источника 5 подачи жидкости под давлением системы гидропривода включения фрикционов и регуляторов давления в этой системе. 4 11676 1 2009.02.28 Схема алгоритма формирования сигналов управления на переключение передач и блокирование гидротрансформатора (фиг. 2) содержит следующие блоки инициализации запуска программы алгоритма - блок 1 базы данных - блок 2 фиксации и преобразования информационных переменных - блок 3 логических операций - блоки 4, 5, 6, 7, 8, 13 и 14 формирования сигналов управления на переключение передач - блоки 9 и 11 и на блокирование гидротрансформатора - блоки 15 и 17 осуществления защиты от цикличности переключения передач - блок 12 формирования операций управления фрикционами коробки передач и блокирования гидротрансформатора - блоки 10 и 16 индикации и отображения информации - блок 18. После пуска двигателя включается питание ЭБУ и запускается программа алгоритма управления. При запуске программы на выполнение база данных загружается в оперативную память микропроцессора. В базе данных хранятся параметры характеристик управления, эталонной характеристики двигателя, параметры трансмиссии и колес машины,параметры ограничений, используемые при реализации алгоритма управления. Состояние системы управления ГМП и режимов ее работы отображается на информационном табло. В каждом цикле отработки программы путем опроса датчиков осуществляется фиксация и преобразование информационных переменных, блок 3 на фиг. 2 координаты положения педали подачи топлива а частоты вращения вала двигателя д частоты вращения турбины гидротрансформатора т частоты вращения выходного вала коробки передач вв скорости мобильной машиныполной массы автомобиля а уклона дорогиположения педали рабочей тормозной системы т положения рычага стояночного тормоза тс положения органа включения тормоза-замедлителя тз температуры масла гидромеханической передачи гмп номера включенной передачи кп индикатора состояния механизма блокирования гидротрансформатора гт. В блоке 3 на основе формул численного дифференцирования осуществляется также вычисление ускорения машины а и скорости изменения координаты положения педали подачи топлива /. Для определения ускорения машины может быть использован датчик продольного ускорения. Регрессионные модели алгоритма управления получены заблаговременно на основе математического моделирования и обработки параметров характеристик двигателя, гидромеханической передачи и параметров динамической характеристики мобильной машины с учетом влияния нагрузки, дорожных условий и управляющих воздействий водителя на органы управления скоростью движения машины. Регрессионные модели отображают зависимости между параметрами процессов функционирования двигателя и трансмиссии с учетом управляющих воздействий водителя на педаль подачи топлива и предназначены для определения наивыгоднейших параметров алгоритма автоматизированного управления переключением передач, обеспечивающих высокие показатели тягово-скоростных свойств мобильной машины с соответствующей нагрузкой в конкретных дорожных условиях. Регрессионные модели представляют собой простые алгебраические выражения и их использование в программе алгоритма управления существенно упрощает обработку и анализ информации о текущих значениях параметров движения машины и выработку информационных сигналов системы управления с высокой скоростью в реальном времени при сравнительно небольших требуемых вычислительных ресурсах процессора электронного блока управления. Первая регрессионная модель характеризует функциональную связь координаты положения педали подачи топлива с параметрами эталонной внешней скоростной характеристики двигателя. На фиг. 3 показаны характеристики дизельного двигателя с электронным всережимным регулятором. По оси абсцисс отложена частота вращения вала двигателя д, по оси ординат - вращающий момент двигателя Мд - на фиг. 3 и удельный расход топлива д (г/кВтч) - на фиг. 3 б. Внешняя скоростная характеристика обозначена ВСХ, а регуляторные характеристики обозначены цифрами 1, 2, 3, , , . При разгоне машины значение д возрастает и при достижении некоторой величины пп.в вступает в 5 11676 1 2009.02.28 работу всережимный регулятор, снижая подачу топлива и переводя работу двигателя с ВСХ на соответствующую регуляторную характеристику. При этом по мере увеличения частоты вращения вала двигателя д его вращающий момент Мд быстро уменьшается(фиг. 3 а), а удельный расход топлива д возрастает (фиг. 3 б). Электронный регулятор подачи топлива позволяет получить любой вид регуляторных характеристик двигателя Мд(д). Обычно используют линейные регуляторные характеристики с постоянным углом наклона. В точках пересечения регуляторных характеристик с осью абсцисс момент двигателя равен нулю, а частоту вращения вала двигателя в этих точках называют частотой холостого хода двигателя и обозначают хх (фиг. 3 а). У двигателя с электронным регулятором зависимость между хх и координатой положения педали подачи топлива а линейная,где- минимальная частота холостого хода двигателя (при полностью освобожденной педали подачи топлива) хх - постоянный коэффициент. В процессе разгона машины после перехода двигателя с ВСХ на регуляторную характеристику начинает резко возрастать удельный расход топлива двигателя д, поэтому при достижении частоты вращения вала двигателя значения пп.в, соответствующего точке пересечения -й регуляторной характеристики с внешней скоростной характеристикой, целесообразно осуществить переключение на смежную высшую передачу по сравнению с включенной. Для этого необходимо располагать функциональной зависимостью пп.в от а. Характеристики, приведенные на фиг. 3 а, позволяют построить такую зависимость. Так как внешняя скоростная характеристика двигателя Мд(д) нелинейная, то зависимость пп.в от а также нелинейная и имеет вид, представленный на фиг. 4. Подвергнув регрессионному анализу двумерный массив чисел, составленный из ординат а и пп.в, получают регрессионную модель искомой зависимости пп.в(а). Она представляет собой полином-го порядка. При переключении передач машины с гидромеханической трансмиссией одновременно управляют механизмом блокировки гидротрансформатора. Переключение на высшую передачу сопровождается разблокированием гидротрансформатора. Следовательно, значение пп.в определяют при блокированном гидротрансформаторе и одновременно вычисляют скорость машины пп.в, при достижении которой осуществляют переключение с низшей передачи на смежную высшую. Скорость пп.в вычисляют по формуле пп.впп.в/кп,где Ва - постоянная величина, определяемая параметрами машины кп - передаточное число коробки передач ГМП на передаче, с которой осуществляется переключение на смежную высшую передачу. Однако для эффективности управления недостаточно использовать лишь информацию о скорости пп.в. Если после переключения на высшую передачу машина начнет терять скорость, то придется возвращаться на предыдущую низшую передачу, что отразится на снижении средней эксплуатационной скорости и производительности машины. Следовательно, необходим прогноз потенциала динамичности разгона машины после переключения на высшую передачу. Это обеспечивается применением второй регрессионной модели, позволяющей прогнозировать достаточность потенциала ускорения, достигаемого в процессе разгона машины на предыдущей передаче. Ускорение мобильной машины/ можно определить на основе дифференциального уравнения движенияМ дтртра, а.пр к где а.пр - приведенная масса машины при движении на данной передаче 6 11676 1 2009.02.28 Мд - вращающий момент двигателя тр, тр - соответственно передаточное число и КПД трансмиссии к - радиус качения ведущих колес машины а - полная масса машины- ускорение свободного падения- коэффициент суммарного дорожного сопротивления, равный сумме коэффициента сопротивления качениюколес машины и продольного уклона дороги- сила сопротивления воздуха. Полная масса машины а равна сумме массы снаряженной машины 0 и массы нагрузки г (массы груза). Приведенная масса машины вычисляется по формуле а.правр 0 гвр,где вр - условная дополнительная масса, учитывающая кинетическую энергию вращающихся масс двигателя, трансмиссии и колес машины в их относительном вращательном движении по отношению к корпусу машины. Для анализа параметров движения удобно использовать динамическую характеристику машины, представляющую собой зависимость динамического фактораот скорости . Динамический фактор - это безразмерная величина, характеризующая потенциальные возможности машины по преодолению дорожных сопротивлений или получению ускорения в данных дорожных условиях. Динамический фактор зависит от параметров машины и вычисляется по формуле М дтртр к( 0 г ) Из этой формулы следует, что значениезависит от вращающего момента двигателя Мд, определяемого координатой положения педали подачи топлива а, от передаточного числа тр и КПД трансмиссии тр, определяемых номером включенной передачи и состоянием гидротрансформатора (блокирован/неблокирован), от нагрузки г, а также от скорости машины , влияющей на величину силы сопротивления воздуха . С другой стороны, согласно определению динамического фактораа.пр( 0 г )Из этой формулы видно, что ускорение машины/ на данной передаче зависит от нагрузки г и дорожных условий, характеризуемых величиной. Влияние массы нагрузки машины г удобно оценивать безразмерной величиной, называемой коэффициентом нагрузки, который вычисляется по формуле нг/г.ном,где г.ном - номинальная грузоподъемность машины. Вычислив значение динамического факторана -й передаче при скорости машины пп.в , а также значение динамического фактора 1 на (1)-й передаче при той же скорости в одинаковых дорожных условиях,и полагая в пределе значение ускорения после переключения на (1)-ю передачу 10,получаем величину достаточности потенциала ускорения разгона на -й передаче, вычисляемую по формуле.врВычисленное по этой формуле значение пп.в на -й передаче учитывает нагрузку машины г, положение педали подачи топлива а, номер включенной передачи, с которым связано значение условной дополнительной массы вр , а также параметры дорожных условий, что позволяет с высокой степенью достоверности прогнозировать величину достаточности потенциала ускорения для предотвращения цикличности переключения 7 11676 1 2009.02.28 передач (т.е. неоправданно частого переключения двух смежных передач), обеспечить устойчивое движение машины в сложных дорожных условиях и высокие показатели эксплуатационной эффективности мобильной машины. На фиг. 5 приведена схема определения значений динамического фактораи 1 при переключении с -й на (1)-ю передачу при заданной величине координаты положения педали подачи топлива аи принятом значении коэффициента нагрузки н. Характеристики динамического фактора на -й и (1)-й передачах при блокированном гидротрансформаторе обозначены Бл, а на (1)-й передаче при неблокированном гидротрансформаторе Н-бл. При работе двигателя на -й регуляторной характеристике получаемые графические зависимости динамического фактора обозначены буквой . Скорость машины в рассматриваемом примере переключения передач равна пп.в . Для этой скорости определяется значение достаточности потенциала ускорения пп.в . Если при движении машины в реальных дорожных условиях при скоростипп.в ее ускорениепп.в, то электронный блок управления сформирует сигнал на переключение передач. Протекание процесса разгона машины и изменения ее динамического фактора отображено на фиг. 5 линией . В точкеформируется сигнал на переключение передач. В точке с машина начинает разгон на (1)-й передаче при неблокированном гидротрансформаторе, а в точкегидротрансформатор блокируется. Построение регрессионной модели прогнозирования достаточности потенциала ускорения разгона для переключения на высшую передачу осуществляют путем моделирования динамических характеристик мобильной машины при варьировании ее параметров,величины нагрузки, положения педали подачи топлива, дорожных условий при движении машины на различных передачах, при этом для всех передач получают трехмерные массивы взаимосвязанных числовых значений параметров , н и пп.в. Регрессионная модель для определения пп.в представляется в виде двумерного полинома -го порядка, аргументами которого принимаются координата положения педали подачи топлива а и коэффициент нагрузки машины н. Для высокой точности прогнозирования рекомендуется принять значение 2. Например, при 3 полином имеет следующий вид 2 2 2 2 пп . в 012 н 3 н 45 н 6 н 7 н 8393 , н где- коэффициенты регрессии. На фиг. 6 показан пример графика, построенного по данной регрессионной модели. На фиг. 7 раскрыто содержание алгоритма формирования сигналов управления на переключение с низшей на высшую передачу. В блоке 1 происходит проверка температурного режима гидромеханической передачи. При превышении температуры масла гмп предельно допустимого значения доп переключение на высшую передачу не допускается. Переключение возможно, если ускорение автомобиля положительно, т.е.0 - блок 2, а значение координаты положения педали подачи топлива а не ниже допустимого значения доп, при котором обеспечивается устойчивая работа двигателя (блок 3). В блоке 4 учитывается скорость снижения нажатия на педаль подачи топлива. В блоке 5 по первой регрессионной модели ЭБУ вычисляет значение частоты вращения вала двигателя пп.в, соответствующее точке пересечения внешней скоростной характеристики двигателя с -й регуляторной характеристикой, принадлежащей заданному положению педали подачи топлива а , а в блоке 6 вычисляется значение скорости машины пп.в. В блоке 7 действительная скорость машинысравнивается со значением пп.в. Еслипп.в, тогда в блоке 8 вычисляется прогнозное значение достаточности потенциала ускорения машины пп.в для последующего устойчивого движения после переключения на высшую передачу и предотвращения цикличности работы системы управления переключением передач. В блоке 9 действительное ускорение машины а при движении на -й передаче сравнивается со значением пп.в. Еслипп.в, то осуществляется переход к бло 8 11676 1 2009.02.28 ку 12, в котором формируется команда на управление переключением. При этом управляющий сигнал уп.кп принимает значение, равное единице, т.е. уп.кп 1, запоминается номер предыдущей передачи кпкп и изменяется информационный сигнал номера включаемой передачи кпкп 1. При наличии сигнала уп.кп 1 в блоке 13 по специальному алгоритму осуществляется управление фрикционами коробки передач, обеспечивающими переключение с низшей -й передачи на высшую (1)-ю передачу. Если на -й передаче машина движется с ускорением, но условие блока 9 не выполняется, т.е.пп.в, то скорость ее тем не менее возрастает, и кинетическая энергия машины увеличивается. В этой ситуации также предусмотрена возможность переключения на высшую передачу. Для этого необходимо, чтобы скорость машиныпревысила значение пп.в на заданную величину , которая зависит от номера переключаемой передачи. Для обнаружения этой ситуации в программе алгоритма предусмотрены блоки 10 и 11 (фиг. 7),обеспечивающие формирование сигнала на включение высшей передачи. Целесообразность такого решения определяется тем, что по истечении заданного времени задержки формирования нового сигнала управления зу, принимаемого обычно в пределах 2-3 с,произойдет блокирование гидротрансформатора. При этом, как видно из фиг. 5, динамический фактор машины в точкесущественно больше, чем в точке , и поэтому увеличивается динамичность разгона машины. В сложных дорожных условиях, при значительных колебаниях сопротивления движению машины (пересеченная, холмистая местность), может возникнуть необоснованно частое переключение двух смежных передач (так называемая цикличность переключения). Для снижения отрицательных последствий этого явления в алгоритме управления предусмотрена соответствующая защита, отображаемая на фиг. 2 блоком 12. Обращение к алгоритму защиты происходит при формировании сигнала управления на переключение с высшей на низшую передачу. Схема алгоритма защиты от цикличности переключения передач представлена на фиг. 8. Значение индикатора низшей передачипри запуске программы алгоритма кп равно нулю, а в процессе движения машины соответствует номеру предыдущей низшей передачи, полученному при выполнении переключения- 1. Если условие в блоке 1 на фиг. 8 не выполняется, это означает, что номер включаемой низшей передачи отличается от хранимого в памяти ЭБУ значения номерапредыдущей низшей передачи. Токп гда в блоке 2 происходит присвоение нового номеракп и фиксируется начальный кп номер цикла цикл 1. В блоке 3 восстанавливаются исходные значения параметров зузу 0 для всех передач, определяющие время задержки на переключение. В блоке 12 запоминается значение времени нп, при котором происходит переключение на низшую передачу. Если при очередном включении низшей передачи окажется, что кп , то это означает, что происходит возврат с высшей на прежнюю низшую перекп дачу, поэтому следует проверить возможность возникновения циклического режима. Если время цикла переключения цикл- нп меньше заданного порогового значения цикла зц,то частота переключений значительно возрастает. В блоке 4 производится проверка выполнения условиянпзц. При выполнении этого условия можно ожидать возникновения цикличности переключений. Однако если в следующем цикле окажетсянпзц, то защита от цикличности не нужна. Поэтому при первом проявлении отмеченного условия параметры зу остаются без изменения, и только после повторного его проявления, что обнаруживается блоком 8 при цикл 3, электронный блок управления увеличивает время задержки переключения зу с -й низшей передачи на (1)-ю высшую передачу. В этой ситуации выполняются операции, предусмотренные в блоках 9-11, и значение зу увеличивается в зу раз (например, в 2-3 раза) по формуле зузу 0 зу ,9 11676 1 2009.02.28 где зу 0 - заданные исходные значения времени задержки формирования сигналов управления на переключение каждой -й передачи, сохраняемые в базе данных ЭБУ. Одновременно в блоке 11 принимается цикл 2. Это дает возможность сохранять увеличенное значение зу до тех пор, пока время цикла цикл не станет больше зц. При циклзц, т.е. при невыполнении условия блока 4, исчезнет опасность зацикливания процесса переключения передач, и тогда восстанавливается значение зу (блоки 5 и 6). Источники информации 1. Патент США 2001/0053731, МПК 616 59/00, 2001. 2. Патент США 5070746, МПК 616 23/00, 1991. 3. Басалаев В.Н. Весц НАН Беларус Сер. физ.-тэхн. навук. - 2002. -3. - С. 39-43. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B60W 10/00
Метки: управления, движения, способ, гидромеханической, автоматического, двигателем, передачей, дизельным, мобильной, тягово-скоростными, адаптивного, режимами, машины
Код ссылки
<a href="https://by.patents.su/12-11676-sposob-adaptivnogo-avtomaticheskogo-upravleniya-tyagovo-skorostnymi-rezhimami-dvizheniya-mobilnojj-mashiny-s-dizelnym-dvigatelem-i-gidromehanicheskojj-peredachejj.html" rel="bookmark" title="База патентов Беларуси">Способ адаптивного автоматического управления тягово-скоростными режимами движения мобильной машины с дизельным двигателем и гидромеханической передачей</a>
Способ адаптивного управления тягово-скоростными режимами движения автомобиля
Номер патента: 9786
Опубликовано: 30.10.2007
Авторы: Животов Максим Сергеевич, Егоров Александр Николаевич, Якубов Евгений Николаевич, Дычкин Иван Михайлович, Горбатенко Николай Николаевич, Кудин Сергей Николаевич, Тарасик Владимир Петрович, Пузанова Ольга Владимировна
МПК: B60W 10/00
Метки: тягово-скоростными, способ, автомобиля, адаптивного, движения, режимами, управления
Текст:
...механизмов автомобиля, согласно изобретению, осуществляют пробег снаряженного автомобиля с заблокированным 3 9786 1 2007.10.30 гидротрансформатором на горизонтальном участке дороги с постоянным коэффициентом сопротивления качению при отсутствии помех движению и при полностью нажатой педали подачи топлива, при этом посредством электронного блока системы управления, включенного в режиме адаптации, на основе эталонной характеристики...
Способ адаптивного управления тягово-скоростными режимами движения мобильного средства
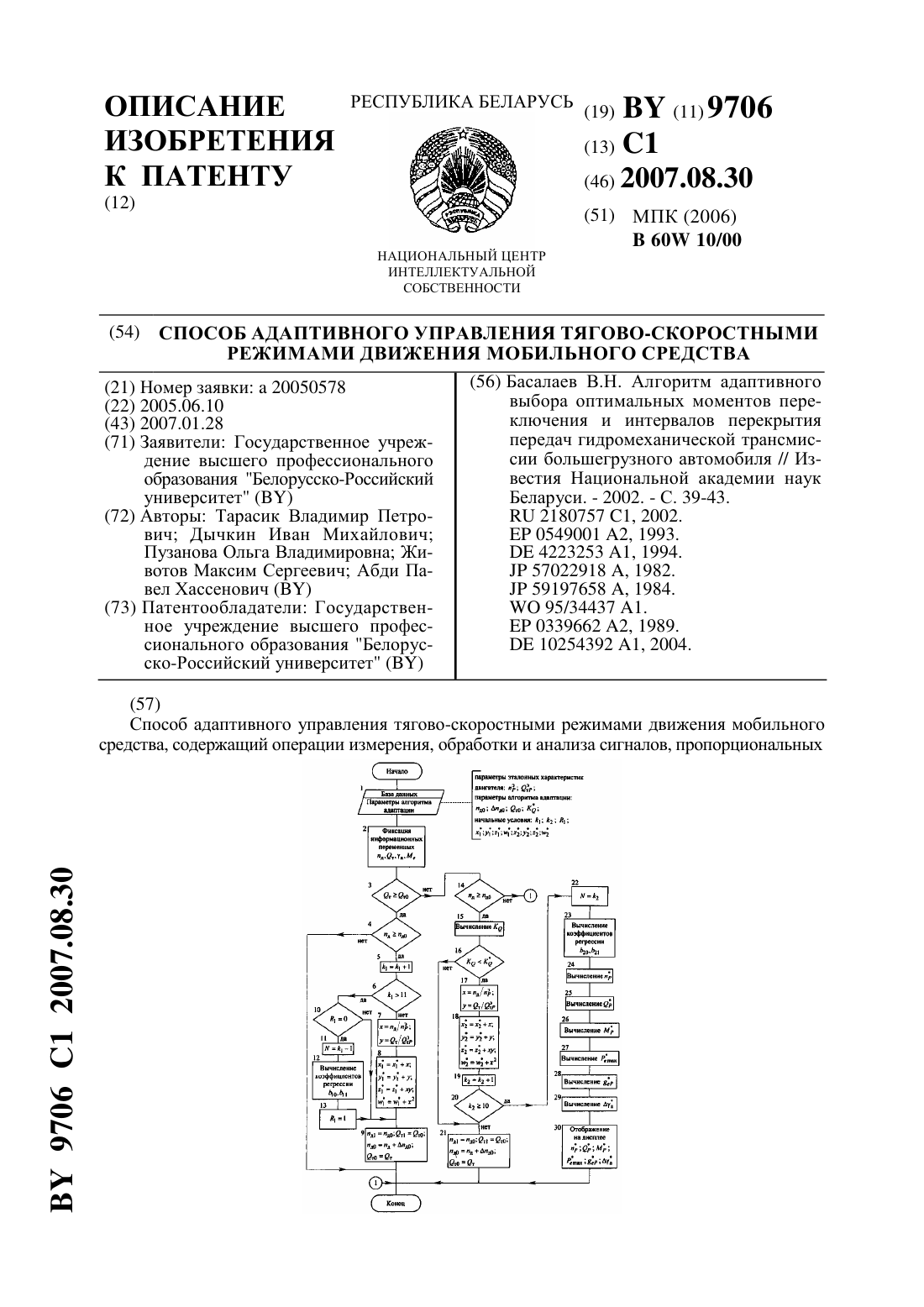
Номер патента: 9706
Опубликовано: 30.08.2007
Авторы: Абди Павел Хассенович, Животов Максим Сергеевич, Тарасик Владимир Петрович, Пузанова Ольга Владимировна, Дычкин Иван Михайлович
МПК: B60W 10/00
Метки: мобильного, тягово-скоростными, средства, режимами, движения, способ, адаптивного, управления
Текст:
...поправку координаты положения педали подачи топлива, по которой корректируют значение координаты положения полностью нажатой педали подачи топлива, после выполнения алгоритма адаптации отображают на информационном табло блока индикации информацию о полученных скорректированных значениях упомянутых параметров, характеризующих внешнюю скоростную и предельную регуляторную характеристики двигателя с занесением этих параметров в базу данных...
Способ адаптивного автоматического управления трансмиссией мобильной машины
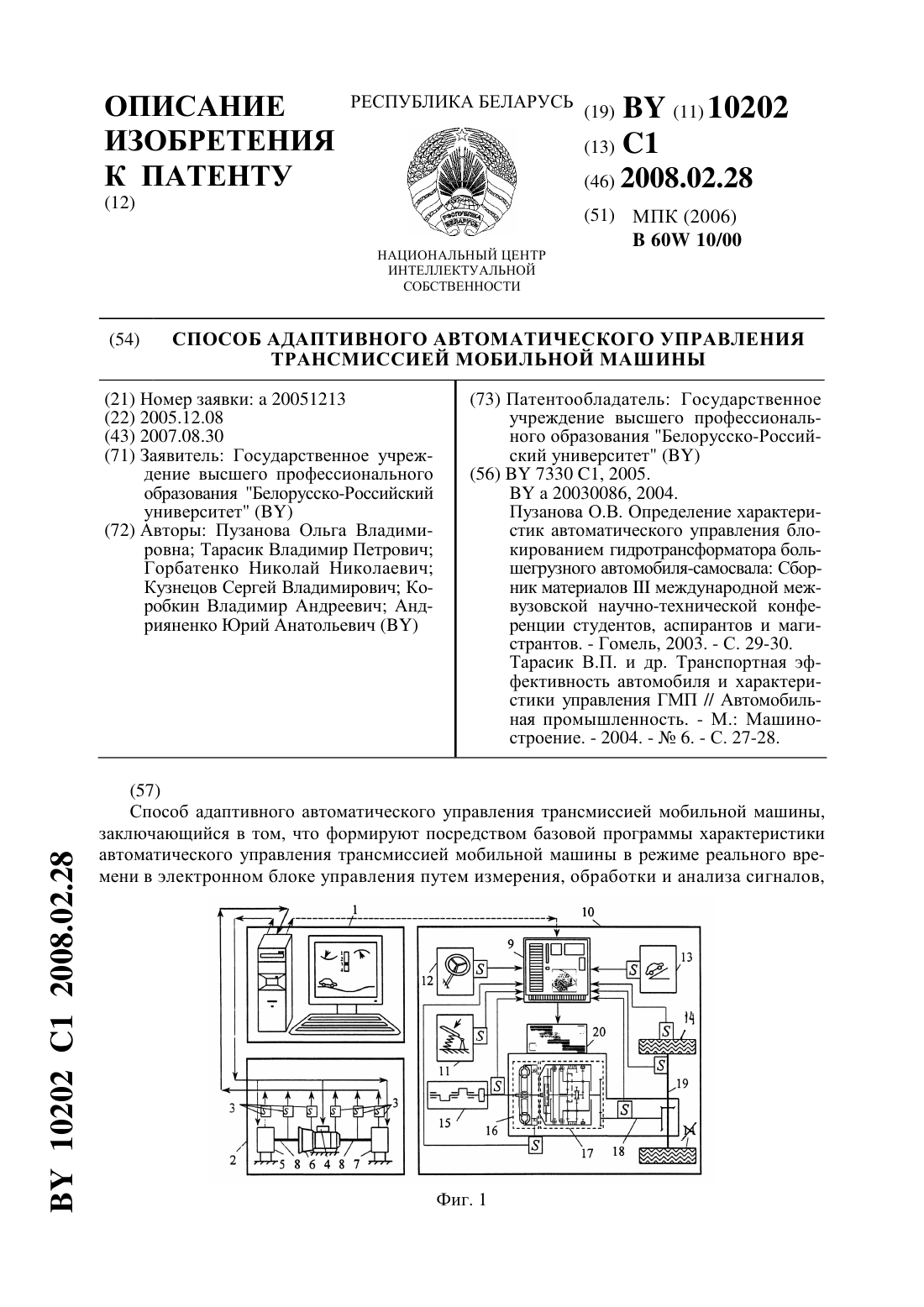
Номер патента: 10202
Опубликовано: 28.02.2008
Авторы: Коробкин Владимир Андреевич, Горбатенко Николай Николаевич, Кузнецов Сергей Владимирович, Андрияненко Юрий Анатольевич, Пузанова Ольга Владимировна, Тарасик Владимир Петрович
МПК: B60W 10/00
Метки: мобильной, автоматического, адаптивного, трансмиссией, способ, управления, машины
Текст:
...Этого можно достичь предварительным моделированием движения мобильной машины во всем многообразии возможных условий эксплуатации. Оперативное управление трансмиссией мобильной машины возможно при минимизации логических и вычислительных процедур. Способ 3 10202 1 2008.02.28 предполагает определение моментов переключения передач и блокирования/разблокирования гидротрансформатора на основе организации логической процедуры выбора регрессионных...
Система адаптивного интеллектуального управления энергетическими режимами мобильной машины

Номер патента: U 3421
Опубликовано: 30.04.2007
Авторы: Тарасик Владимир Петрович, Рынкевич Сергей Анатольевич, Коробкин Владимир Андреевич, Андрияненко Юрий Анатольевич
МПК: B65K 41/00
Метки: энергетическими, машины, интеллектуального, режимами, мобильной, адаптивного, управления, система
Текст:
...двигателем 1, трансмиссией 2, включающей гидротрансформатор с коробкой передач (не показаны), и тормозной системой 3, которая эксплуатируется в условиях внешней среды 4. Для измерения информационных параметров характеристик управляющих воздействий водителя, энергетических режимов мобильной машины и внешней среды установлены датчики угловой скорости двигателя 5, трансмиссионных элементов (турбинного колеса гидротрансформатора и выходного...
Способ интеллектуального управления энергетическими режимами мобильной машины
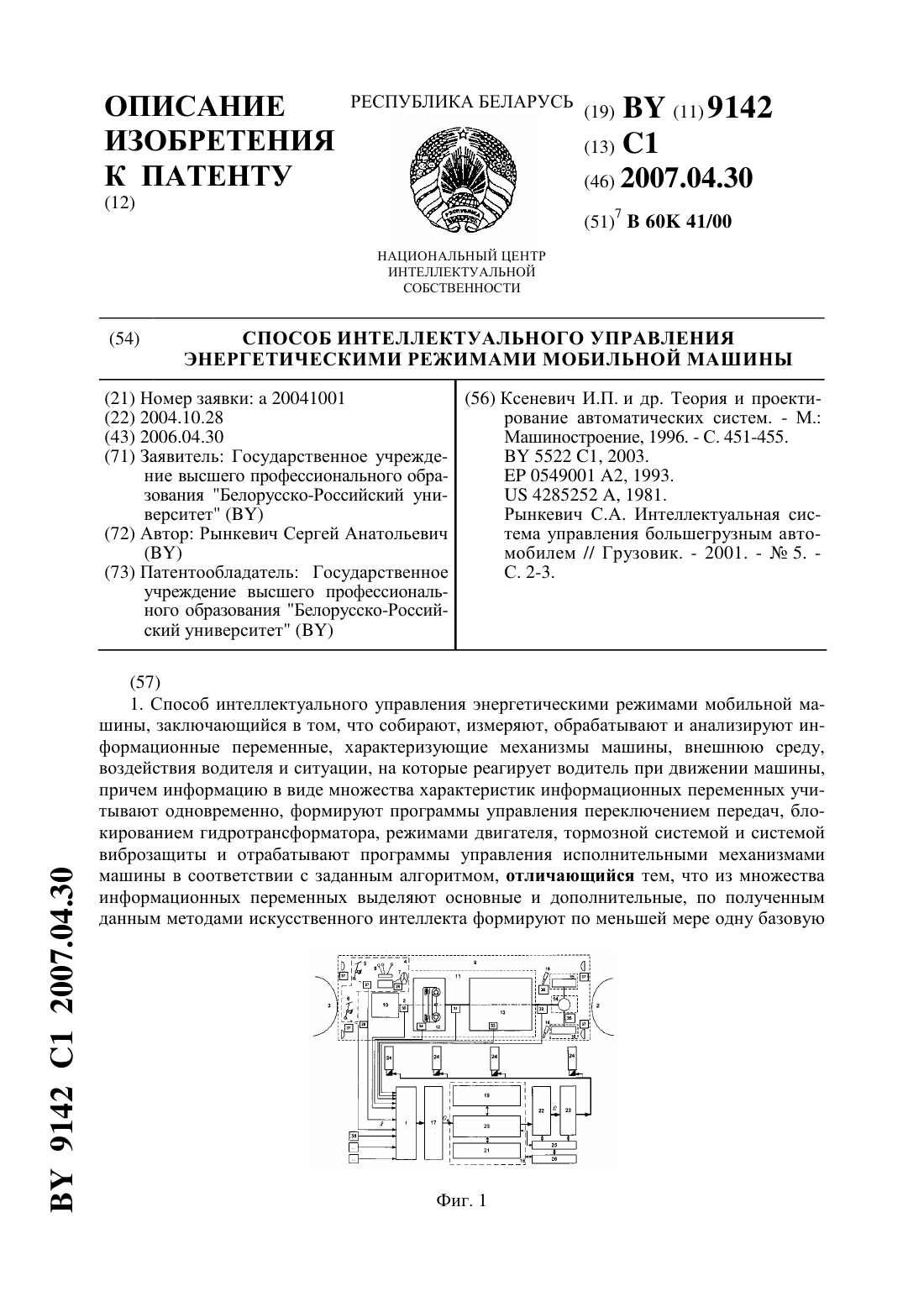
Номер патента: 9142
Опубликовано: 30.04.2007
Автор: Рынкевич Сергей Анатольевич
МПК: B60K 41/00
Метки: управления, интеллектуального, энергетическими, мобильной, способ, машины, режимами
Текст:
...36 в амортизаторах системы виброзащиты, температуры и давления масла двигателя, температуры и давления масла в трансмиссии, давления жидкости во фрикционах переключения передач, давления во впускном трубопроводе (группа б), сканирования и визуализации 37 местности, характеристик макро- и микропрофиля дороги 38, состояния опорной поверхности, продольного и поперечного уклона (группа в). Информация о ситуациях косвенно формируется благодаря...
Предыдущий патент: Биоаффинный сорбент и способ избирательного удаления антител к инсулину из крови больных сахарным диабетом
Следующий патент: Смазка для пресс-форм литья под давлением
Случайный патент: Устройство для формирования многокомпонентной кавитирующей струи жидкости