Способ адаптивного автоматического управления трансмиссией мобильной машины
Номер патента: 10202
Опубликовано: 28.02.2008
Авторы: Тарасик Владимир Петрович, Кузнецов Сергей Владимирович, Пузанова Ольга Владимировна, Коробкин Владимир Андреевич, Андрияненко Юрий Анатольевич, Горбатенко Николай Николаевич
Текст
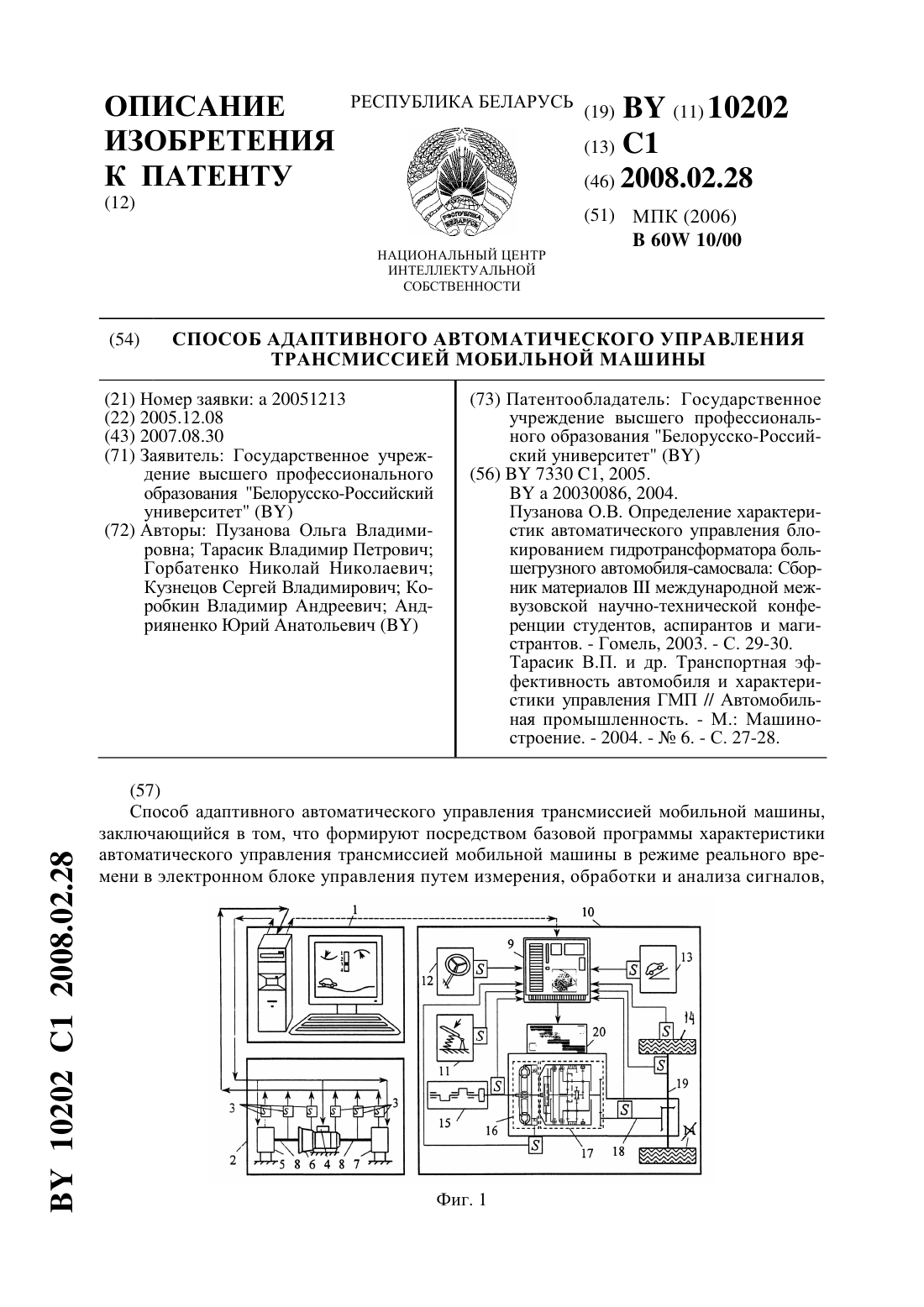
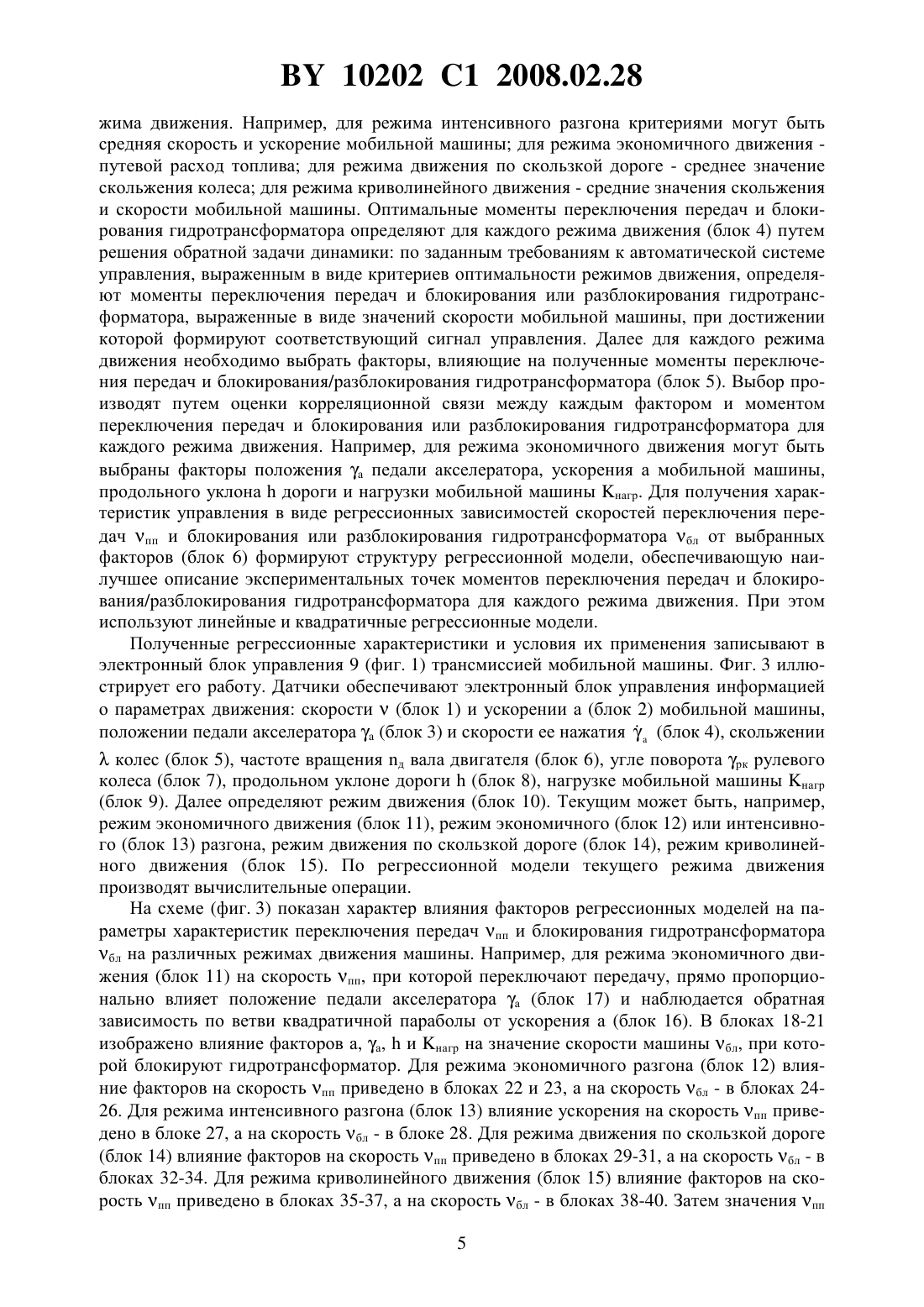
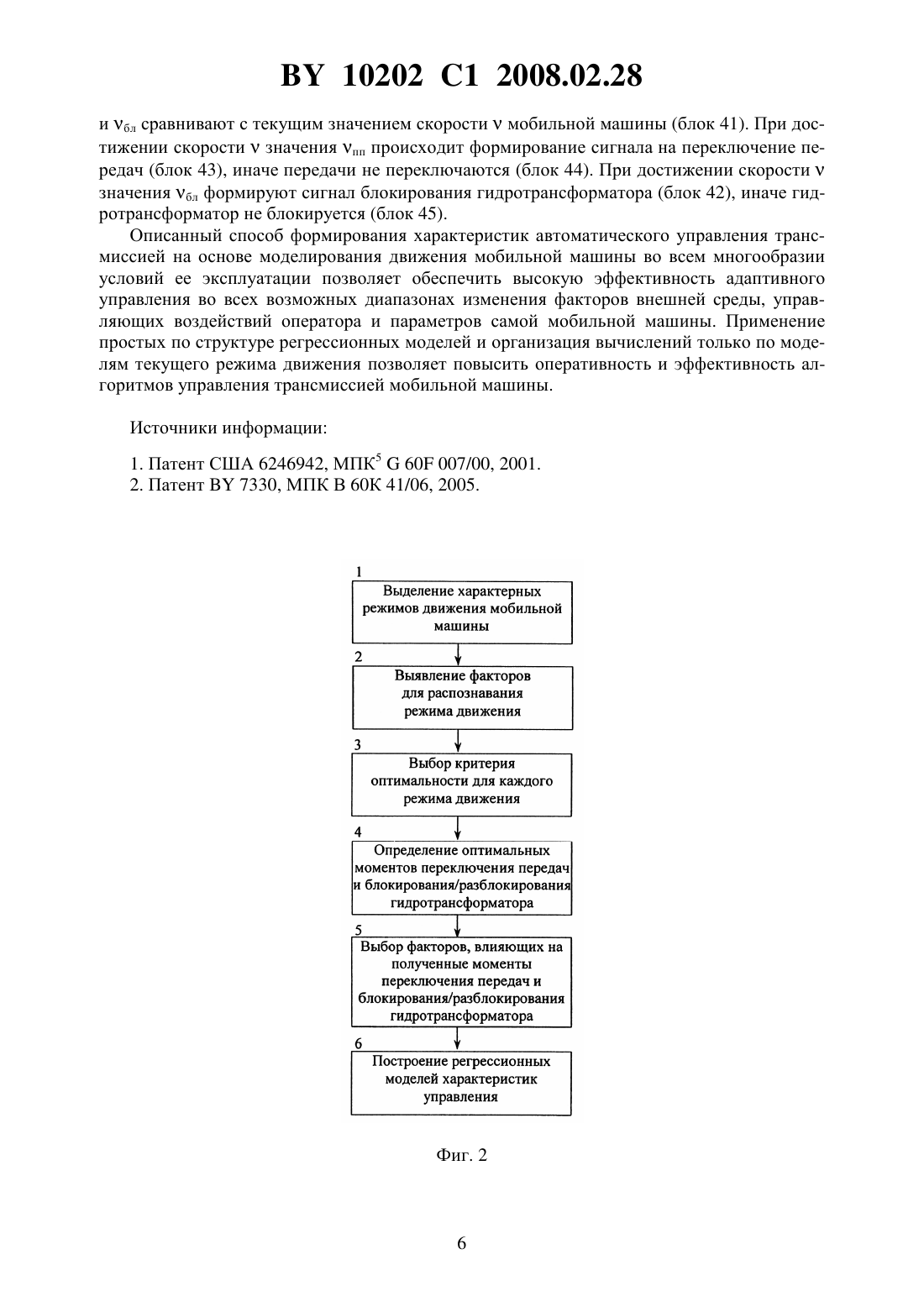
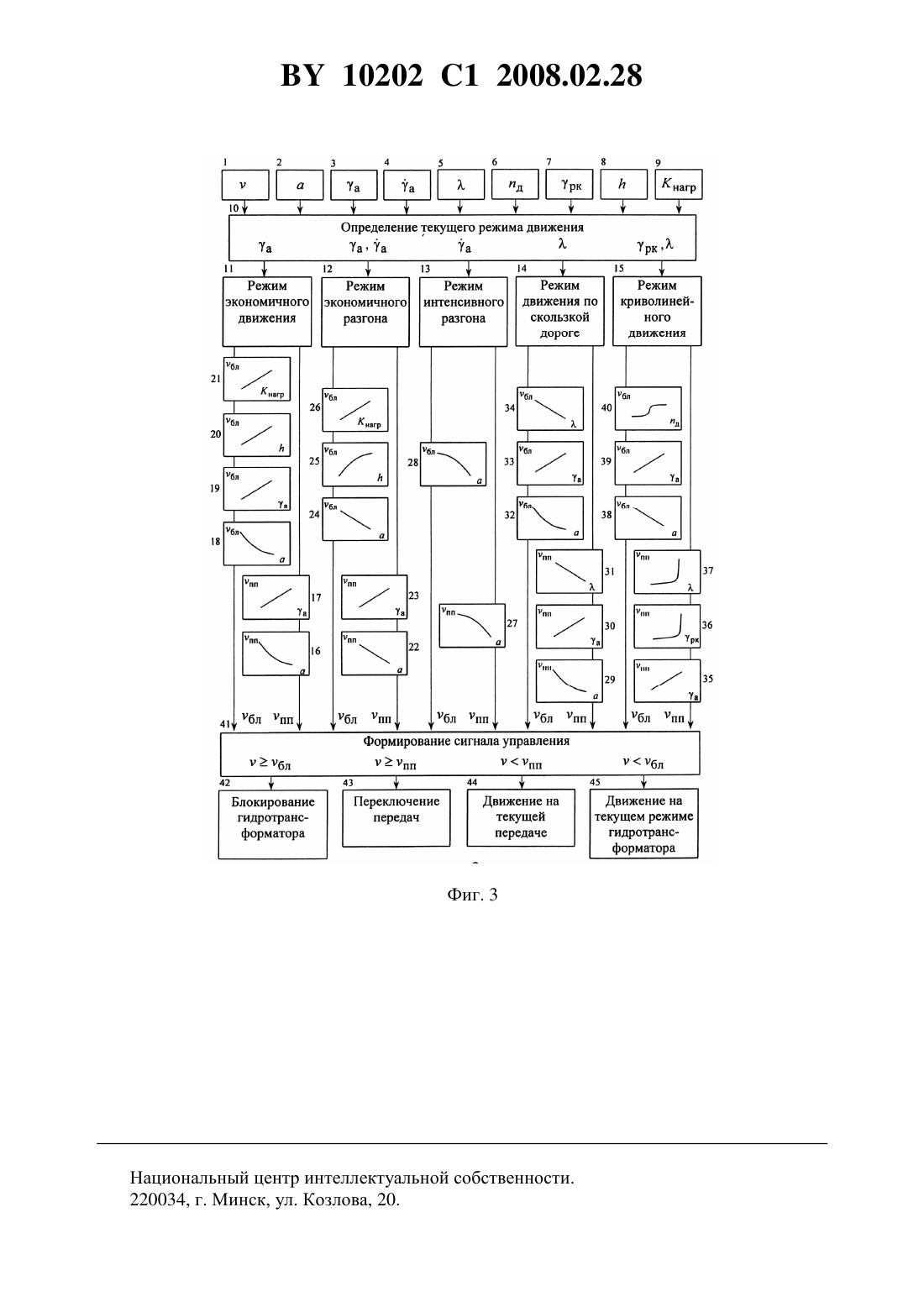
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ АДАПТИВНОГО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТРАНСМИССИЕЙ МОБИЛЬНОЙ МАШИНЫ(71) Заявитель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(72) Авторы Пузанова Ольга Владимировна Тарасик Владимир Петрович Горбатенко Николай Николаевич Кузнецов Сергей Владимирович Коробкин Владимир Андреевич Андрияненко Юрий Анатольевич(73) Патентообладатель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(56)7330 1, 2005.а 20030086, 2004. Пузанова О.В. Определение характеристик автоматического управления блокированием гидротрансформатора большегрузного автомобиля-самосвала Сборник материаловмеждународной межвузовской научно-технической конференции студентов, аспирантов и магистрантов. - Гомель, 2003. - С. 29-30. Тарасик В.П. и др. Транспортная эффективность автомобиля и характеристики управления ГМП // Автомобильная промышленность. - М. Машиностроение. - 2004. -6. - С. 27-28.(57) Способ адаптивного автоматического управления трансмиссией мобильной машины,заключающийся в том, что формируют посредством базовой программы характеристики автоматического управления трансмиссией мобильной машины в режиме реального времени в электронном блоке управления путем измерения, обработки и анализа сигналов, Фиг. 1 10202 1 2008.02.28 характеризующих процессы в двигателе, трансмиссии и органах управления мобильной машиной при ее движении, базовую программу формируют предварительно путем моделирования движения мобильной машины с учетом характеристик внешней среды, режимов движения, управляющих воздействий водителя и механизмов мобильной машины и определяют оптимальные характеристики управления переключением ступеней коробки передач и блокированием гидротрансформатора путем выявления зависимости параметров характеристик управления от параметров автомобиля, внешней среды и управляющих воздействий водителя, осуществления регрессионного анализа результатов моделирования движения машины и получения регрессионных моделей, устанавливающих зависимость между принятыми информационными переменными и параметрами базовой программы, причем базовую программу управления выполняют в виде совокупности характеристик, устанавливающих зависимость между значениями скоростей, при которых переключаются передачи и блокируется гидротрансформатор, и положением педали акселератора, а пороговые значения скоростей, соответствующие оптимальным условиям формирования сигналов управления, принимают в качестве параметров базовых характеристик управления, отличающийся тем, что оптимальные характеристики управления переключением ступеней коробки передач и блокированием гидротрансформатора определяют путем имитации движения мобильной машины на характерных для нее режимах,при этом выявляют совокупность факторов, характеризующих каждый из упомянутых режимов движения и отличающих данный режим движения от остальных для обеспечения возможности распознавания текущего режима движения в электронном блоке управления,оценивают эффективность каждого характерного режима движения путем выбора критерия его оптимальности из набора критериев, записанных в память электронного устройства управления, а оптимальные моменты переключения ступеней коробки передач и блокирования гидротрансформатора определяют путем решения обратной задачи динамики по предварительно заданным к системе автоматического управления требованиям, представленным в виде критериев оптимальности для каждого предусмотренного в базовой программе управления режима движения. Изобретение относится к автоматическим системам управления, в частности к автоматическим системам управления трансмиссиями мобильных машин. Известен способ определения характеристик управления на основе использования многопараметровой характеристики двигателя. Моменты переключения передач определяются из условия минимизации расхода топлива при частичном использовании мощности двигателя или из условия максимизации ускорения при полном использовании мощности 1. Многопараметровая характеристика определяется при установившихся режимах работы двигателя, т.е. она является статической характеристикой. Следовательно, характеристики управления, полученные на основе данной характеристики, тоже статичны. Однако при движении мобильной машины происходит постоянное изменение условий и режимов ее работы. Поэтому статические характеристики управления требуют соответствующей корректировки для обеспечения адаптивного управления при движении в реальных условиях эксплуатации. Известен способ управления мобильной машиной, включающий операцию моделирования мобильной машины, по результатам которого определяется характеристики управления базовой программы управления, оптимальной только в узком диапазоне изменения параметров движения. Адаптация базовой программы к реальным условиям предлагается путем применения продукционных моделей нечеткой логики 2. Применение моделирования только для определения характеристик базовой программы не позволяет объективно оценить условия переключения во всем многообразии усло 2 10202 1 2008.02.28 вий эксплуатации при максимально и минимально возможных значениях параметров движения. Это не позволяет оценить корректность нечеткой логической адаптации базовой программы управления к реальным условиям движения. Адаптация требует учета большого числа факторов, влияющих на процесс движения при управлении, а обработка этой информации аппаратом нечеткой логики требует использования большого числа продукционных моделей. При использовании большого числа продукционных моделей увеличивается время срабатывания системы управления, т.к. требуется выполнение логических и вычислительных операций по всем продукционным моделям при каждой фиксации сигналов датчиков. Это снижает оперативность и эффективность управления. Задачей изобретения является создание способа адаптивного автоматического управления, обеспечивающего эффективное управление трансмиссией мобильной машины во всех возможных диапазонах изменения факторов внешней среды, управляющих воздействий оператора и параметров самой мобильной машины. Поставленная задача решается предлагаемым способом адаптивного автоматического управления трансмиссией мобильной машины, заключающимся в том, что формируют посредством базовой программы характеристики автоматического управления трансмиссией мобильной машины в режиме реального времени в электронном блоке управления путем измерения, обработки и анализа сигналов, характеризующих процессы в двигателе,трансмиссии и органах управления мобильной машиной при ее движении, базовую программу формируют предварительно путем моделирования движения мобильной машины с учетом характеристик внешней среды, режимов движения, управляющих воздействий водителя и механизмов мобильной машины и определяют оптимальные характеристики управления переключением ступеней коробки передач и блокированием гидротрансформатора путем выявления зависимости параметров характеристик управления от параметров автомобиля, внешней среды и управляющих воздействий водителя, осуществления регрессионного анализа результатов моделирования движения машины и получения регрессионных моделей, устанавливающих зависимость между принятыми информационными переменными и параметрами базовой программы, причем базовую программу управления выполняют в виде совокупности характеристик, устанавливающих зависимость между значениями скоростей, при которых переключаются передачи и блокируется гидротрансформатор, и положением педали акселератора, а пороговые значения скоростей, соответствующие оптимальным условиям формирования сигналов управления, принимают в качестве параметров базовых характеристик управления, согласно изобретению,оптимальные характеристики управления переключением ступеней коробки передач и блокированием гидротрансформатора определяют путем имитации движения мобильной машины на характерных для нее режимах, при этом выявляют совокупность факторов,характеризующих каждый из упомянутых режимов движения и отличающих данный режим движения от остальных для обеспечения возможности распознавания текущего режима движения в электронном блоке управления, оценивают эффективность каждого характерного режима движения путем выбора критерия его оптимальности из набора критериев, записанных в память электронного устройства управления, а оптимальные моменты переключения ступеней коробки передач и блокирования гидротрансформатора определяют путем решения обратной задачи динамики по предварительно заданным к системе автоматического управления требованиям, представленным в виде критериев оптимальности для каждого предусмотренного в базовой программе управления режима движения. Эффективное управление трансмиссией мобильной машины требует объективного учета множества факторов, влияющих на процесс движения. Этого можно достичь предварительным моделированием движения мобильной машины во всем многообразии возможных условий эксплуатации. Оперативное управление трансмиссией мобильной машины возможно при минимизации логических и вычислительных процедур. Способ 3 10202 1 2008.02.28 предполагает определение моментов переключения передач и блокирования/разблокирования гидротрансформатора на основе организации логической процедуры выбора регрессионных моделей, соответствующих текущему режиму движения, и вычислительных операций по выбранным регрессионным моделям. Регрессионные модели имеют простую структуру и позволяют учитывать все факторы, влияющие на процесс движения. Сущность изобретения поясняется фигурами. На фиг. 1 изображена схема формирования характеристик автоматического управления трансмиссией мобильной машины. На фиг. 2 отражена последовательность действий, производимых для получения характеристик автоматического управления трансмиссией мобильной машины на основе моделирования. На фиг. 3 представлена схема определения моментов переключения передач и блокирования гидротрансформатора по регрессионным зависимостям. Предварительный этап формирования характеристик управления предусматривает моделирование движения мобильной машины во всем многообразии возможных условий ее эксплуатации. Для этого на компьютере 1 (фиг. 1) реализуют математическую модель движения мобильной машины, а на стенде 2 - физическую модель движения мобильной машины. Стенд включает систему датчиков 3, исполнительный блок 4, двигатель 5,трансмиссию 6, инерционную массу 7 и карданные передачи 8. На основе компьютерного и стендового моделирования синтезируют характеристики управления, которые записывают в электронный блок управления 9 системы управления трансмиссией мобильной машины 10. Управление трансмиссией мобильной машины осуществляют в режиме реального времени. Электронный блок 9 получает информацию с датчиково параметрах движения. Это могут быть датчики положения педали акселератора а и скорости ее нажатия 11 угла поворота рк рулевого колеса 12 продольного уклонадороги 13 скольженияколеса 14 частоты вращения д вала двигателя 15, турбины гидротрансформатора 16, выходного вала 18 коробки передач 17, на основании показаний которых определяют скоростьи ускорение а мобильной машины нагрузки на мосты 19 мобильной машины нагр. На основании информации, полученной с датчиков , и с учетом характеристик автоматического управления электронный блок управления 9 формирует сигналы на переключение передач и блокирование или разблокирование гидротрансформатора, которые реализуют исполнительные механизмы 20 системы управления. Синтез характеристик управления выполняют посредством моделирования. Последовательность выполняемых процедур при этом соответствует фиг. 2. В процессе компьютерного и стендового моделирования имитируют движение мобильной машины во всем многообразии условий эксплуатации с учетом возможных диапазонов изменения факторов внешней среды, управляющих воздействий оператора и параметров самой мобильной машины. Из этого многообразия выделяют характерные режимы движения мобильной машины (блок 1). Например, это могут быть режимы интенсивного или экономичного разгона, экономичного движения, движения по скользкой дороге, криволинейного движения и другие. Для каждого такого режима движения выделяют особенности, отличающие его от всех остальных режимов. Эти особенности отражают определенным набором факторов для распознавания текущего режима движения (блок 2). Например, для режима экономичного разгона могут быть использованы факторы положения педали акселератора а и ско рости ее нажатиядля режима движения по скользкой дороге - фактор скольженияколес для режима криволинейного движения - угол поворота рк рулевого колеса и скольжениеколес. Автоматическое управление трансмиссией решает общую задачу обеспечения оперативности и эффективности при движении мобильной машины, однако для каждого режима эта задача решается по-разному. Эффективность каждого режима оценивают своим критерием. В блоке 3 производят выбор критерия оптимальности каждого ре 4 10202 1 2008.02.28 жима движения. Например, для режима интенсивного разгона критериями могут быть средняя скорость и ускорение мобильной машины для режима экономичного движения путевой расход топлива для режима движения по скользкой дороге - среднее значение скольжения колеса для режима криволинейного движения - средние значения скольжения и скорости мобильной машины. Оптимальные моменты переключения передач и блокирования гидротрансформатора определяют для каждого режима движения (блок 4) путем решения обратной задачи динамики по заданным требованиям к автоматической системе управления, выраженным в виде критериев оптимальности режимов движения, определяют моменты переключения передач и блокирования или разблокирования гидротрансформатора, выраженные в виде значений скорости мобильной машины, при достижении которой формируют соответствующий сигнал управления. Далее для каждого режима движения необходимо выбрать факторы, влияющие на полученные моменты переключения передач и блокирования/разблокирования гидротрансформатора (блок 5). Выбор производят путем оценки корреляционной связи между каждым фактором и моментом переключения передач и блокирования или разблокирования гидротрансформатора для каждого режима движения. Например, для режима экономичного движения могут быть выбраны факторы положения а педали акселератора, ускорения а мобильной машины,продольного уклонадороги и нагрузки мобильной машины нагр. Для получения характеристик управления в виде регрессионных зависимостей скоростей переключения передач пп и блокирования или разблокирования гидротрансформатора бл от выбранных факторов (блок 6) формируют структуру регрессионной модели, обеспечивающую наилучшее описание экспериментальных точек моментов переключения передач и блокирования/разблокирования гидротрансформатора для каждого режима движения. При этом используют линейные и квадратичные регрессионные модели. Полученные регрессионные характеристики и условия их применения записывают в электронный блок управления 9 (фиг. 1) трансмиссией мобильной машины. Фиг. 3 иллюстрирует его работу. Датчики обеспечивают электронный блок управления информацией о параметрах движения скорости(блок 1) и ускорении а (блок 2) мобильной машины, положении педали акселератора а (блок 3) и скорости ее нажатия(блок 4), скольженииколес (блок 5), частоте вращения д вала двигателя (блок 6), угле поворота рк рулевого колеса (блок 7), продольном уклоне дороги(блок 8), нагрузке мобильной машины нагр(блок 9). Далее определяют режим движения (блок 10). Текущим может быть, например,режим экономичного движения (блок 11), режим экономичного (блок 12) или интенсивного (блок 13) разгона, режим движения по скользкой дороге (блок 14), режим криволинейного движения (блок 15). По регрессионной модели текущего режима движения производят вычислительные операции. На схеме (фиг. 3) показан характер влияния факторов регрессионных моделей на параметры характеристик переключения передач пп и блокирования гидротрансформатора бл на различных режимах движения машины. Например, для режима экономичного движения (блок 11) на скорость пп, при которой переключают передачу, прямо пропорционально влияет положение педали акселератора а (блок 17) и наблюдается обратная зависимость по ветви квадратичной параболы от ускорения а (блок 16). В блоках 18-21 изображено влияние факторов а, а,и нагр на значение скорости машины бл, при которой блокируют гидротрансформатор. Для режима экономичного разгона (блок 12) влияние факторов на скорость пп приведено в блоках 22 и 23, а на скорость бл - в блоках 2426. Для режима интенсивного разгона (блок 13) влияние ускорения на скорость пп приведено в блоке 27, а на скорость бл - в блоке 28. Для режима движения по скользкой дороге(блок 14) влияние факторов на скорость пп приведено в блоках 29-31, а на скорость бл - в блоках 32-34. Для режима криволинейного движения (блок 15) влияние факторов на скорость пп приведено в блоках 35-37, а на скорость бл - в блоках 38-40. Затем значения пп 5 10202 1 2008.02.28 и бл сравнивают с текущим значением скоростимобильной машины (блок 41). При достижении скоростизначения пп происходит формирование сигнала на переключение передач (блок 43), иначе передачи не переключаются (блок 44). При достижении скоростизначения бл формируют сигнал блокирования гидротрансформатора (блок 42), иначе гидротрансформатор не блокируется (блок 45). Описанный способ формирования характеристик автоматического управления трансмиссией на основе моделирования движения мобильной машины во всем многообразии условий ее эксплуатации позволяет обеспечить высокую эффективность адаптивного управления во всех возможных диапазонах изменения факторов внешней среды, управляющих воздействий оператора и параметров самой мобильной машины. Применение простых по структуре регрессионных моделей и организация вычислений только по моделям текущего режима движения позволяет повысить оперативность и эффективность алгоритмов управления трансмиссией мобильной машины. Источники информации 1. Патент США 6246942, МПК 560 007/00, 2001. 2. Патент 7330, МПК В 60 К 41/06, 2005. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 7
МПК / Метки
МПК: B60W 10/00
Метки: способ, мобильной, адаптивного, трансмиссией, автоматического, машины, управления
Код ссылки
<a href="https://by.patents.su/7-10202-sposob-adaptivnogo-avtomaticheskogo-upravleniya-transmissiejj-mobilnojj-mashiny.html" rel="bookmark" title="База патентов Беларуси">Способ адаптивного автоматического управления трансмиссией мобильной машины</a>
Способ адаптивного управления мобильной машиной

Номер патента: 9945
Опубликовано: 30.10.2007
Авторы: Пузанова Ольга Владимировна, Тарасик Владимир Петрович
МПК: B60W 10/00
Метки: управления, способ, мобильной, машиной, адаптивного
Текст:
...для адаптивной работы автоматической системы управления. Сущность изобретения поясняется чертежами. На фиг. 1 показана структурная схема автоматической системы управления трансмиссией мобильной машины, а на фиг. 2 - алгоритм выбора информационных переменных автоматической системы управления. 2 9945 1 2007.10.30 Трансмиссия мобильной машины 2 (фиг. 1), содержащая гидротрансформатор 3, коробку передач 4 и главную передачу 5, преобразует...
Система адаптивного интеллектуального управления энергетическими режимами мобильной машины

Номер патента: U 3421
Опубликовано: 30.04.2007
Авторы: Рынкевич Сергей Анатольевич, Андрияненко Юрий Анатольевич, Коробкин Владимир Андреевич, Тарасик Владимир Петрович
МПК: B65K 41/00
Метки: интеллектуального, энергетическими, управления, режимами, система, адаптивного, машины, мобильной
Текст:
...двигателем 1, трансмиссией 2, включающей гидротрансформатор с коробкой передач (не показаны), и тормозной системой 3, которая эксплуатируется в условиях внешней среды 4. Для измерения информационных параметров характеристик управляющих воздействий водителя, энергетических режимов мобильной машины и внешней среды установлены датчики угловой скорости двигателя 5, трансмиссионных элементов (турбинного колеса гидротрансформатора и выходного...
Система автоматического управления гидромеханической трансмиссией

Номер патента: 5082
Опубликовано: 30.03.2003
Авторы: Тарасик Владимир Петрович, Рынкевич Сергей Анатольевич
МПК: B60K 41/06
Метки: система, автоматического, трансмиссией, гидромеханической, управления
Текст:
...Система содержит датчик 34 хода педали 4 акселератора и датчик 35 хода педали 36 тормоза. Каждый из датчиков 34 и 35 выполнен в виде преобразователей перемещений в электрический сигнал, величина которого пропорциональна скорости перемещения соответствующих педалей. Датчик 34 хода педали 4 акселератора связан посредством усилителя-преобразователя 37 электрического сигнала, электронного ключа 38 и цепи управления 39 с электромагнитом...
Система автоматического управления гидромеханической трансмиссией
Номер патента: 5522
Опубликовано: 30.09.2003
Авторы: Абрашкин Валерий Павлович, Рынкевич Сергей Анатольевич, Тарасик Владимир Петрович, Бочкарев Геннадий Владимирович
МПК: B60K 41/06
Метки: управления, трансмиссией, система, гидромеханической, автоматического
Текст:
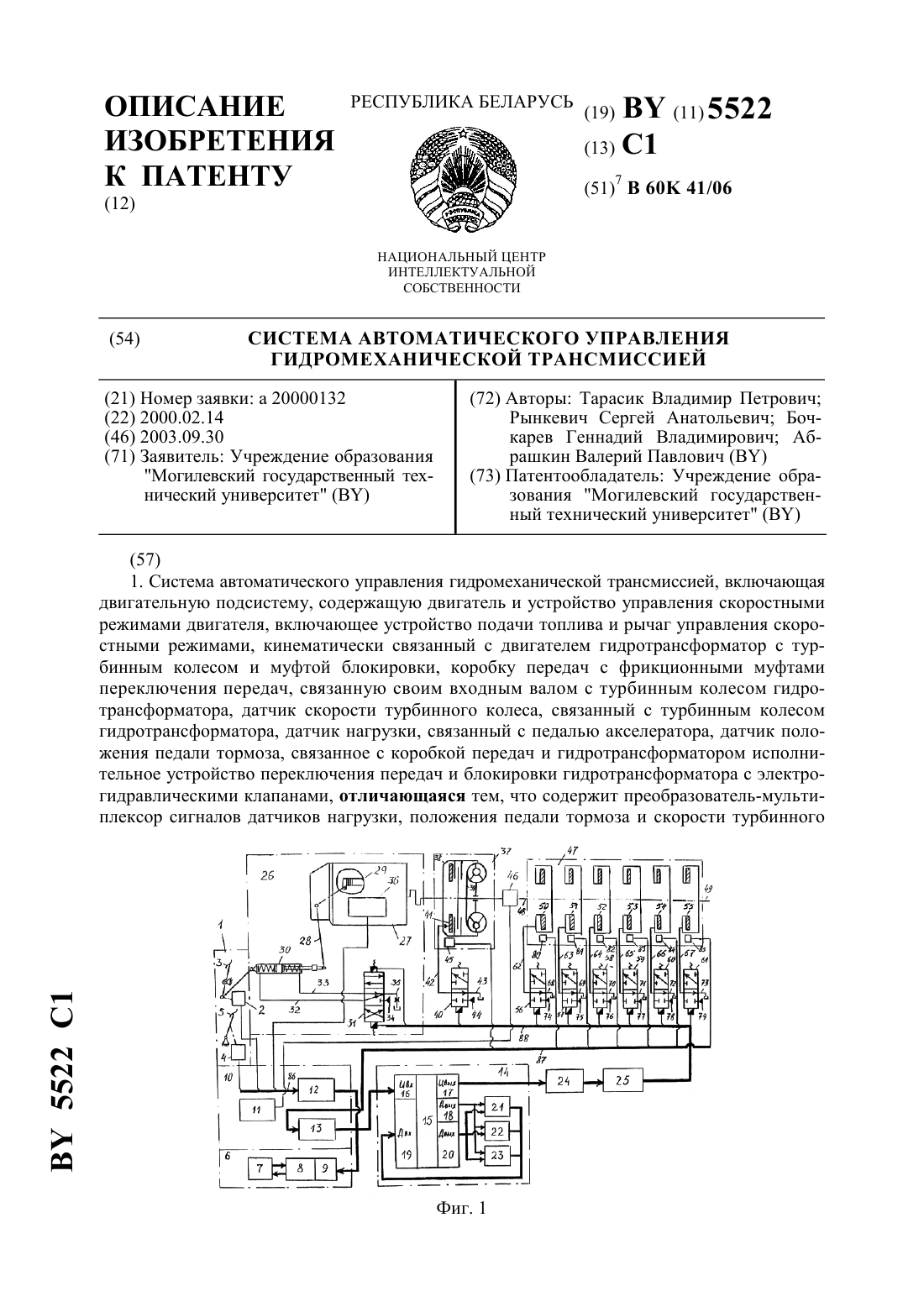
...оптимальных маршрутов, центрального процессорного устройства 8 и интерфейсного блока 9 в) измерительно-преобразовательную подсистему 10, включающую в себя комплект датчиков внешней среды 11, преобразователь-мультиплексор 12 сигналов датчиков нагрузки, положения педали тормоза и скорости турбинного колеса, преобразовательмультиплексор 13 сигналов датчиков состояния фрикционных муфт коробки передач и муфты блокировки гидротрансформатора г)...
Способ интеллектуального управления энергетическими режимами мобильной машины
Номер патента: 9142
Опубликовано: 30.04.2007
Автор: Рынкевич Сергей Анатольевич
МПК: B60K 41/00
Метки: способ, режимами, энергетическими, машины, мобильной, управления, интеллектуального
Текст:
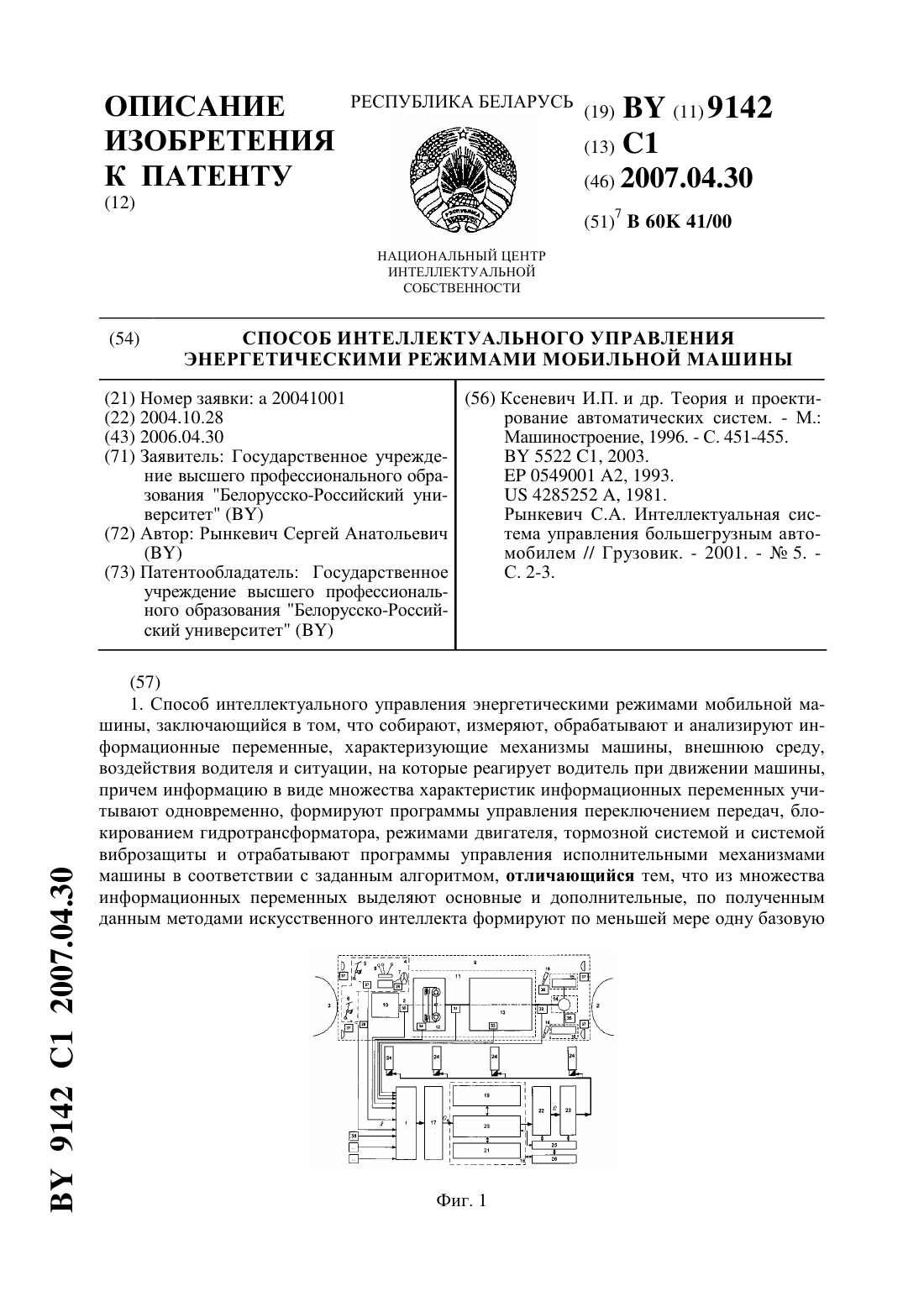
...36 в амортизаторах системы виброзащиты, температуры и давления масла двигателя, температуры и давления масла в трансмиссии, давления жидкости во фрикционах переключения передач, давления во впускном трубопроводе (группа б), сканирования и визуализации 37 местности, характеристик макро- и микропрофиля дороги 38, состояния опорной поверхности, продольного и поперечного уклона (группа в). Информация о ситуациях косвенно формируется благодаря...
Предыдущий патент: Раствор для безэлектролизного осаждения пленок золота на никелевые покрытия
Следующий патент: Пищевая добавка
Случайный патент: Способ осушения слабопроницаемого грунта