Способ интеллектуального управления энергетическими режимами мобильной машины

Текст
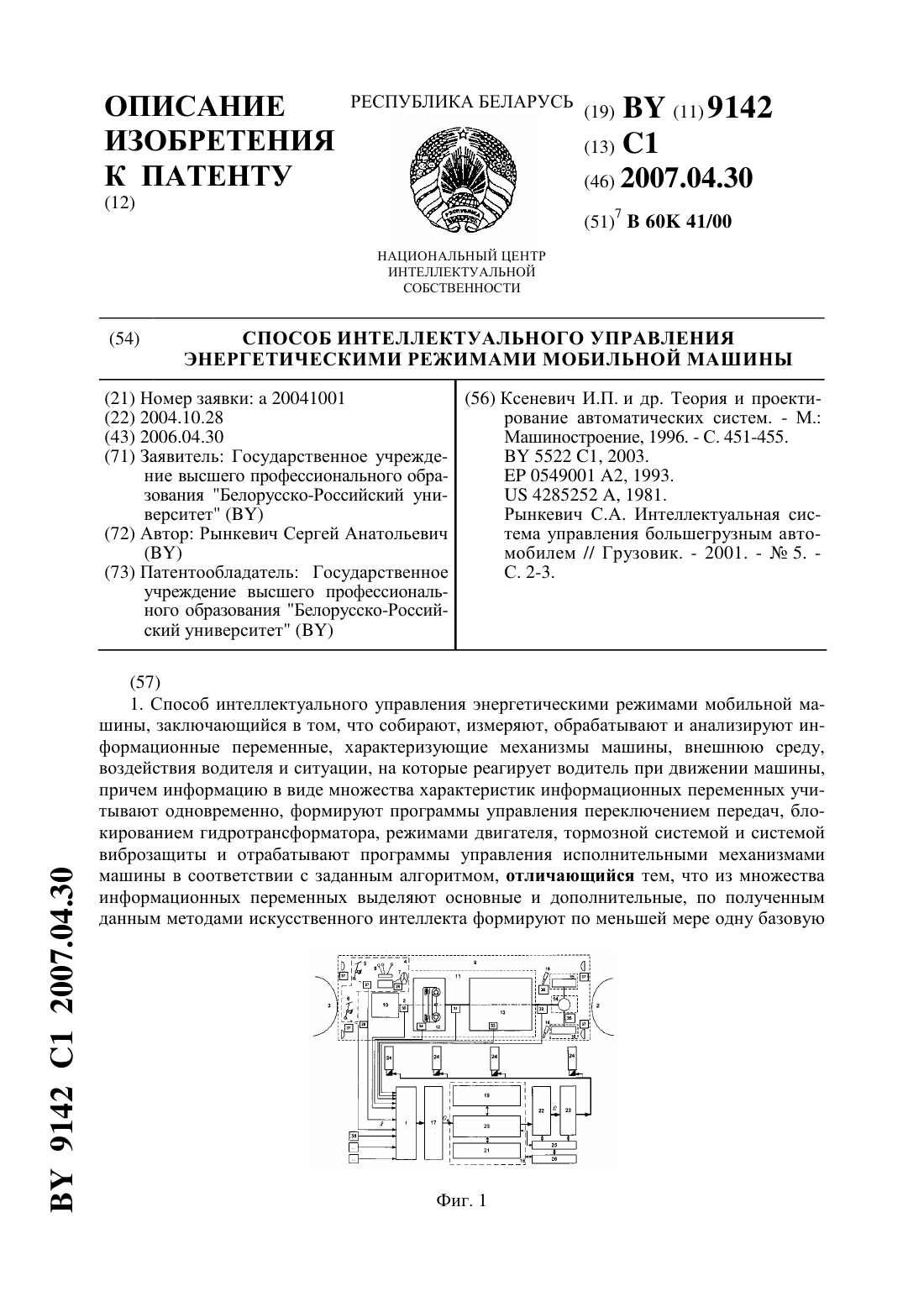
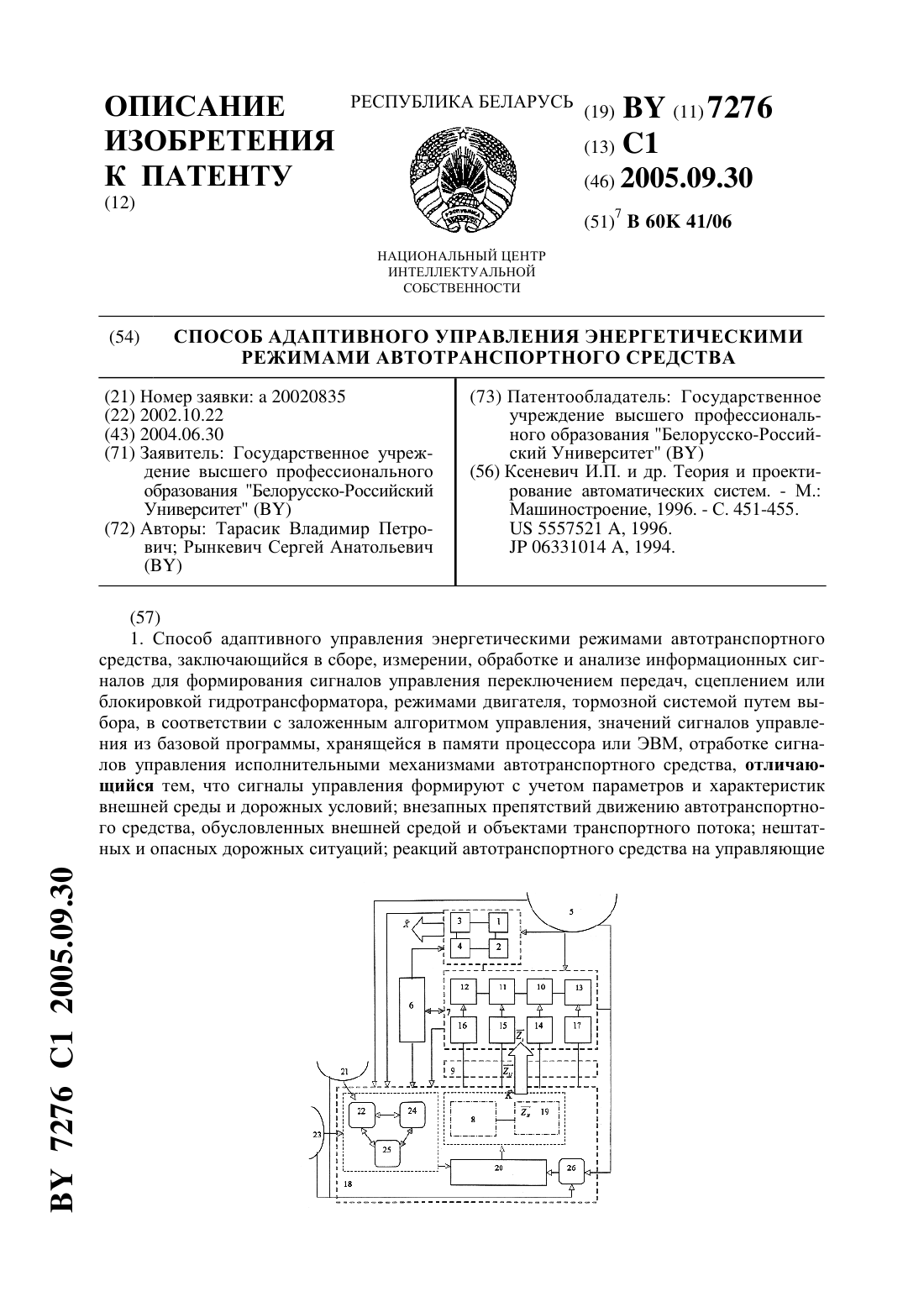
(51)60 41/00 НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ИНТЕЛЛЕКТУАЛЬНОГО УПРАВЛЕНИЯ ЭНЕРГЕТИЧЕСКИМИ РЕЖИМАМИ МОБИЛЬНОЙ МАШИНЫ(71) Заявитель Государственное учрежде 5522 1, 2003. ние высшего профессионального обра 0549001 2, 1993. зования Белорусско-Российский уни 4285252 , 1981. верситетРынкевич С.А. Интеллектуальная сис(72) Автор Рынкевич Сергей Анатольевич тема управления большегрузным авто мобилем // Грузовик. - 2001. -5. (73) Патентообладатель Государственное С. 2-3. учреждение высшего профессионального образования Белорусско-Российский университет(57) 1. Способ интеллектуального управления энергетическими режимами мобильной машины, заключающийся в том, что собирают, измеряют, обрабатывают и анализируют информационные переменные, характеризующие механизмы машины, внешнюю среду,воздействия водителя и ситуации, на которые реагирует водитель при движении машины,причем информацию в виде множества характеристик информационных переменных учитывают одновременно, формируют программы управления переключением передач, блокированием гидротрансформатора, режимами двигателя, тормозной системой и системой виброзащиты и отрабатывают программы управления исполнительными механизмами машины в соответствии с заданным алгоритмом, отличающийся тем, что из множества информационных переменных выделяют основные и дополнительные, по полученным данным методами искусственного интеллекта формируют по меньшей мере одну базовую 9142 1 2007.04.30 программу управления с возможностью ее трансформации и адаптации к реальным условиям внешней среды и движения машины посредством формируемой соответствующей программы адаптации, а также распознавания и обучения для возможности автоматического изменения характеристик формируемых сигналов алгоритма управления исполнительными механизмами машины при изменении условий внешней среды и движения машины, причем в базовой программе управления учитывают основные информационные переменные, а в программе адаптацииосновные и дополнительные. 2. Способ по п. 1, отличающийся тем, что распознавание и обучение осуществляют путем идентификации и запоминания типовых и нетиповых ситуаций, режимов и особенностей управления мобильной машиной для обеспечения возможности повышения показателей эффективности, безопасности и улучшения условий труда водителя. 3. Способ по п. 1, отличающийся тем, что алгоритм управления формируют используя современные технологии приема, обработки, анализа и передачи информации, например технологии нечеткой логики, искусственных нейронных сетей, генетических алгоритмов,ассоциативной памяти и/или их комбинации. 4. Способ по п. 1, отличающийся тем, что трансформируют по меньшей мере одну базовую программу управления в процессе распознавания и обучения путем технологий нечеткой логики, искусственных нейронных сетей, генетических алгоритмов, ассоциативной памяти и/или их комбинации. 5. Способ по п. 1, отличающийся тем, что осуществляют контроль за изменением информационных переменных и характеристик программ управления посредством интерфейса с инструментальной системой. Изобретение относится к транспортному машиностроению, а именно, к системам автоматического управления мобильными машинами. Известна система автоматического управления гидромеханической трансмиссией, которая реализует способ управления энергетическими режимами мобильной машины, заключающийся в измерении и обработке информационных переменных положения педалей акселератора и тормоза, угловых скоростей валов трансмиссии и других сигналов, формировании на их основе управляющих воздействий в виде характеристик управления переключением передач, блокированием гидротрансформатора и двигателем и отработке сформированных управляющих сигналов исполнительными механизмами 1. Известна проблема автоматизации автотранспортных средств и возможные пути ее решения на основе создания интеллектуальных систем управления с использованием современных методов и средств обработки информации 2, 3. Известен алгоритм управления системой автоматического переключения передач мобильной машины и способ, реализующий данный алгоритм, основанный на измерении и обработке сигналов, характеризующих различные параметры машины и ее механизмов положение педали акселератора и рейки топливного насоса двигателя, угловые скорости двигателя и ведущих колес, скорость и ускорение машины, формировании характеристик переключения передач и реализации программы 4, с. 451-455. Недостатком упомянутых выше способов является невозможность полного учета всей текущей информации об изменении параметров и характеристик механизмов машины,внешней среды и управляющих воздействиях водителя. Этот недостаток связан с тем, что эти способы не предусматривают учета ряда важной информации, требующей своевременного контроля. Например, не учитываются такие информационные переменные, как скорость и время воздействия водителя на педали акселератора, тормоза, рулевое колесо,время перемещения ноги с одной педали на другую, степень и характер воздействия на рычаг переключения передач, степень загрузки машины, давление в гидросистеме, температурный режим двигателя и трансмиссии и т.д. Другим недостатком упомянутых спосо 2 9142 1 2007.04.30 бов является неодновременность учета текущей информации, что не позволяет адекватно идентифицировать и распознать ту или иную ситуацию. Недостатком также является то, что реализуемый на основе данных способов алгоритм управления является слабо адаптивным, т.е. он не всегда имеет возможность приспосабливаться к постоянно изменяющимся характеристикам внешней среды, режимам движения машины, управляющим воздействиям водителя и различным, в том числе и опасным, ситуациям. Этот недостаток связан с первыми двумя и вызван прежде всего тем,что не все основные информационные переменные механизмов машины и внешней среды учитываются в алгоритме управления. В результате снижается эффективность распознавания ситуаций, что затрудняет принятие правильных решений по управлению, в результате чего и потенциальные возможности интеллектуального управления мобильной машиной не используются в полной мере. Недостатком способов является также невозможность обучения алгоритмов и улучшения их характеристик. Отмеченный недостаток выражается в том, что системы, реализующие данные способы, лишены возможности обучения новым алгоритмам управления или совершенствования прежних алгоритмов при изменении условий эксплуатации машины, а также обучения приемам управления в нештатных (опасных и экстремальных) ситуациях. С другой стороны, такие системы не будут приспособлены к тому, чтобы реализовывать оптимальные алгоритмы управления энергетическими режимами во всем многообразии дорожных условий, режимов движения и ситуаций. Недостатками данных способов и алгоритмов управления, построенных на их основе,являются также следующие. Во-первых, в них не учтены постоянно меняющиеся оттенки управляющих воздействий водителя, в частности, посредством анализа таких важных характеристик, как темпа, скорости, силы нажатия на педали акселератора и тормоза, степени воздействия на рулевое колесо и рычаг переключения передач и т.п. Кроме того, не учтена информация, позволяющая судить о навыках, квалификации, психофизиологическом и эмоциональном состоянии водителя, его степени усталости и т.д. Во-вторых, упомянутые способы являются неоднозначными, предписывают много различных вариантов и лишены гибкости, т.е. в различных условиях эксплуатации для достижения высоких показателей эффективности машины алгоритмы управления должны быть различными и иметь возможность перенастраиваться, чего не позволяют отмеченные выше способы. В-третьих, предусмотренная данными способами адаптация программы управления несовершенна и ненадежна, т.к. характеристики адаптации не учитывают множество важнейших информационных переменных, несущих информацию о дорожных условиях, внешней среде, управляющих воздействиях водителя, характеристиках механизмов машины и текущих ситуациях. В результате характеристики адаптации могут не соответствовать реально происходящим процессам и возникающим ситуациям, в том числе нештатным, опасным и аварийным, что снизит безопасность и надежность. В-четвертых, для реализации данных способов в системе автоматического управления на машине в реальных условиях ее эксплуатации в процессе изменения этих условий необходим довольно сложный и трудоемкий процесс коррекции и перенастройки алгоритмов и программ, что потребует перепрограммирования отдельных элементов системы с их демонтажем. Существующая проблема комплексной автоматизации автотранспортных средств может быть решена только на основе создания интеллектуальных систем управления и диагностирования. Решение данной проблемы традиционными методами не является полным,т.к. способы управления несовершенны в силу ряда причин, некоторые из которых отмечены выше. Как отмечается в 4, множество информационных переменных, традиционно используемых ранее, необходимо расширить для того, чтобы эти переменные несли дополнительную информацию о состоянии внешней среды, характере воздействия на объект управления со стороны водителя и многие другие данные. При этом возникает существенное противоречие. Увеличение количества информационных переменных, с одной сторо 3 9142 1 2007.04.30 ны, открывает хорошие возможности для адаптации системы управления к реальным условиям движения машины, а с другой стороны, в этом случае возникают ряд недостатков. Во-первых, система управления получается слишком сложной, что является весьма неудобным при практической реализации ее на объекте управления и снижает надежность. Во-вторых, имитационное моделирование таких сложных объектов, как автомобиль, необходимое на стадии синтеза алгоритмов, требует огромных затрат машинного времени. При этом невозможно учесть многие обстоятельства и особенности поведения объекта и его системы управления, которые выходят за рамки жестких математических моделей. Существует и еще один аспект. Как известно, методика построения оптимальных характеристик управления объектом осуществляется на основе имитационного моделирования. Однако даже самая совершенная математическая модель машины предполагает неизбежные допущения и упрощения физических процессов, происходящих при движении реального автомобиля. Поэтому полученные с помощью модели характеристики управления машины при практическом их использовании в системе автоматического управления на самом деле не будут являться оптимальными и нуждаются в улучшении. В-третьих, подобные модели нельзя использовать в режиме реального времени, что позволило бы своевременно и адекватно отражать изменение внешней среды. Эту сложную проблему нельзя решать прежними традиционными средствами, предполагающими однозначность алгоритмов. При этом система должна обязательно быть адаптивной, самонастраивающейся, самообучающейся. Отсюда вырисовывается проблема нужно создать такую систему управления машиной, которая бы обладала отмеченными свойствами и при этом гарантировала разумное поведение, безопасность, исключала возможность ошибок, предотвращала аварийные ситуации и т.д. Путь решения этой проблемы - создание интеллектуальных систем. В этой связи эффективность систем, реализующих упомянутые выше традиционные способы управления и алгоритмы классической теории автоматического управления, на практике является гораздо ниже ожидаемой. Задачами настоящего изобретения являются повышение надежности работы и значительное расширение функциональных возможностей систем автоматического адаптивного управления энергетическими режимами автотранспортных средств с использованием технологий искусственного интеллекта, повышение показателей эффективности, улучшение качества переходных процессов и снижение динамических нагрузок, улучшение управляемости автотранспортных средств и повышение безопасности движения. Указанные задачи достигаются тем, что в способе интеллектуального управления энергетическими режимами мобильной машины, в котором собирают, измеряют, обрабатывают и анализируют информационные переменные, характеризующие механизмы машины, внешнюю среду, воздействия водителя и ситуации, на которые реагирует водитель при движении машины, причем информацию в виде множества характеристик информационных переменных учитывают одновременно, формируют программы управления переключением передач, блокированием гидротрансформатора, режимами двигателя,тормозной системой и системой виброзащиты и отрабатывают программы управления исполнительными механизмами машины в соответствии с заданным алгоритмом, согласно изобретению, из множества информационных переменных выделяют основные и дополнительные, по полученным данным методами искусственного интеллекта формируют по меньшей мере одну базовую программу управления с возможностью ее трансформации и адаптации к реальным условиям внешней среды и движения машины посредством формируемой соответствующей программы адаптации, а также распознавания и обучения для возможности автоматического изменения характеристик формируемых сигналов алгоритма управления исполнительными механизмами машины при изменении условий внешней среды и движения машины, причем в базовой программе управления учитывают основные информационные переменные, а в программе адаптации - основные и дополнительные. 4 9142 1 2007.04.30 Кроме того, в способе интеллектуального управления энергетическими режимами мобильной машины распознавание и обучение осуществляют путем идентификации и запоминания типовых и нетиповых ситуаций, режимов и особенностей управления машиной для обеспечения возможности повышения показателей эффективности, безопасности и улучшения условий труда водителя. Также в способе интеллектуального управления энергетическими режимами мобильной машины алгоритм управления формируют используя современные технологии приема, обработки, анализа и передачи информации, например, технологии нечеткой логики, искусственных нейронных сетей, генетическихалгоритмов, ассоциативной памяти и (или) их комбинации, и трансформируют по меньшей мере одну базовую программу управления в процессе распознавания и обучения путем технологий нечеткой логики, искусственных нейронных сетей, генетических алгоритмов, ассоциативной памяти и (или) их комбинации. Помимо этого осуществляют контроль за изменением информационных переменных и характеристик программ управления посредством интерфейса с инструментальной системой. В результате функциональные возможности систем автоматического адаптивного управления энергетическими режимами автотранспортных средств и систем автоматизированного диагностирования их механизмов, построенных с реализацией данного способа, значительно расширяются, при этом заметно повышаются показатели эффективности,улучшается качество переходных процессов, снижаются динамические нагрузки, улучшается управляемость машин, повышается безопасность движения и увеличивается надежность. Сущность изобретения поясняется рисунками. Способ интеллектуального управления энергетическими режимами мобильной машины реализуется на схемах фиг. 1, фиг. 2 и фиг. 3. На фиг. 1 показана функциональная схема, отражающая способ интеллектуального управления энергетическими режимами мобильной машины в реальных условиях движения. На фиг. 2 представлены основные операции способа интеллектуального управления энергетическими режимами мобильной машины. На фиг. 3 приведен алгоритм способа интеллектуального управления энергетическими режимами мобильной машины. Способ интеллектуального управления энергетическими режимами мобильной машины (фиг. 1) содержит операции 1 сбора, измерения, обработки и анализа (информационно измерительные операции) характеристик информационных переменных, поступающих от внешней среды 2, ситуаций 3, управляющих воздействий 4 водителя на органы управления педали акселератора 5, тормоза 6, рулевое колесо 7, рычаг переключения передач 8,и от механизмов мобильной машины 9, представленной двигателем 10, трансмиссией 11 с гидротрансформатором 12 (или сцеплением), коробкой передач 13 и главной передачей 14,тормозной системой 15 и системой виброзащиты 16, операции 17 формирования базовых(управления сцеплением), режимами двигателя, тормозной системой и системой виброзащиты, операции 18 интеллектуального управления, включающие базы знаний 19, операции 20 принятия решений и интерфейс 21, операции 22 формирования программ адаптации, операции 23 отработки сигналов программ управленияисполнительными механизмами 24 переключения передач в коробке передач 13, блокированием гидротрансформатора 12, режимами двигателя 10, тормозной системой 15, системой виброзащиты 16 с алгоритмами для осуществления этих операций. Также данный способ включает операции 25 распознавания и обучения и операции 26 трансформации и адаптации базовых программ к реальным условиям. Информация о характеристиках управляющих воздействий водителя (а), механизмов(б) мобильной машины, внешней среды (в) и ситуаций (г) собирается датчиками нескольких групп положения 27 педали акселератора, положения 28 педали тормоза, угла поворота 29 рулевого колеса (группа а), угловых скоростей и ускорений коленчатого вала 30 5 9142 1 2007.04.30 двигателя, турбинного вала 31 гидротрансформатора (для гидромеханических передач),связанного с ним входного 31 вала коробки передач, выходного 32 вала, номера включенной передачи 33 и состояния фрикционов коробки передач, признака 34 блокирования гидротрансформатора, скорости 35 колес, скорости и ускорения машины, давления 36 в амортизаторах системы виброзащиты, температуры и давления масла двигателя, температуры и давления масла в трансмиссии, давления жидкости во фрикционах переключения передач, давления во впускном трубопроводе (группа б), сканирования и визуализации 37 местности, характеристик макро- и микропрофиля дороги 38, состояния опорной поверхности, продольного и поперечного уклона (группа в). Информация о ситуациях косвенно формируется благодаря датчикам групп а, б, в, а также поступает от дополнительных датчиков (группа г) (на схеме обозначены). Снимаемые датчиками 27-38- численные значения называются информационными переменными. Наиболее важные из них являются основными информационными переменными, а остальные - дополнительными. Способ интеллектуального управления энергетическими режимами мобильной машины реализуется следующим образом. Основные и дополнительные информационные переменные, образующие вектори характеризующие с помощью датчиков 27-38- изменения внешней среды 2, управляющих воздействий водителя 4, механизмов машины 9 и различные ситуации 3, посредством операций 1 сбора, измерения, обработки и анализа поступают в ЭВМ или процессорное устройство (на рисунке условно не показано). На основе анализа множества информа ционных переменныхпосредством информационно-измерительных операций 1 осуществляется их селекция и классификация. Далее над ними совершаются операции 17 формирования базовых программ управления переключением передач, блокированием гидротрансформатора (управления сцеплением), режимами двигателя, тормозной системой и системой виброзащиты. Базовые программы представляют собой сочетание пороговых значений скоростей машины, при которых исполнительным механизмам выдаются управляющие сигналы на переключения передач, блокирование или разблокирование гидротрансформатора, управление сцеплением, изменение скоростного режима двигателя,включение или выключение тормозной системой, управление системой виброзащиты. Они формируются либо с помощью комплекса расчетных процедур, включающих математическое моделирование и оптимизацию, либо закладываются в память процессора заранее и выбираются из базы данных в автоматическом или командном режиме. На основе анализа и обработки информации, поступающей в процессе движения машины, с помощью операций 18 интеллектуального управления происходит коррекция и адаптация базовых программ управления к реальным условиям с учетом текущих ситуаций. Это осуществляется посредством операций 20 принятия решений с использованием базы знаний 19. При этом используются технологии теории искусственного интеллекта,например теории нечетких множеств и нечеткой логики, искусственных нейронных сетей,генетических алгоритмов, ассоциативной памяти и (или) их комбинации. Так, при использовании нечеткой логики для учета всевозможных ситуаций, характеристик внешней среды,механизмов машины, управляющих воздействий водителя необходимые информационные переменные описываются функциями принадлежности. После составления и формализации продукционных правил осуществляются процедуры дефаззификации, что позволяет сформировать вектор управляющих сигналов, служащий для корректировки и адаптации базовой программы управления. После выполнения операций 20 принятия решений осуществляются операции 22 формирования программ адаптации. Вектор сформированных управляющих сигналов(в , 1 , ,) представляет собой совокупность векторов управляющих сигналов базовой программы в и векторов адаптации( 1 ,2 , ,) на переключение передач, блокирование или разблокирование гидротрансформатора, управление сцеплением, изменение скоростного режима двигателя, включение или выключение тормозной системой, управление системой виброзащиты и т.д., где- количество исполнительных механизмов, требующих управления (т.е. операций управления в данном случае 6). Операции 22 формирования программ адаптации включают несколько процедур. Первой процедурой является получение ядра алгоритма (ядра базовой программы) управления энергетическими режимами, т.е. базовых характеристик управления для типового режима функционирования транспортного средства. Они представляют собой характеристики, оптимальные по тем или иным критериям, например по динамическим или экономическим критериям, и могут, в принципе, составлять сущность операции 17. В основе базовой программы лежит вектор управляющих сигналовв . Второй процедурой операций 22 является наполнение ядра базовой программы управления адаптивными свойствами и наделение программы способностью принимать логически обоснованные решения. Как уже отмечалось выше, при эксплуатации машины должен учитываться большой объем информации параметры режимов движения и управляющих воздействий водителя, определяющих стиль вождения, параметры внешней среды, характеристики всевозможных ситуаций, на которые реагирует водитель (внезапные препятствия движению, помехи, нештатные и опасные ситуации), что требует непрерывной и незамедлительной коррекции основного алгоритма. С использованием технологий искусственного интеллекта формируются корректирующие управляющие сигналы, которые в программе адаптации учитываются совместно с основной программой. Например, с использованием технологий теории нечетких множеств корректирующая величина управляющего сигнала формируется посредством соответствующей обработки продукционных правил и функций принадлежности, описанных лингвистическими переменными. После выполнения операций 22 осуществляются операции 23 отработки сигналов управления исполнительными механизмами 24 переключения передач, блокирования гидротрансформатора, режимами двигателя, тормозной системой и системой виброзащиты. Отработка сигналов управления исполнительными механизмами 24 осуществляется с использованием сформированных или взятых из базы знаний управляющих сигналов базовой программыВ и программ адаптации. Операции 23 с использованием элементов 24 заключаются в последовательном переключении на смежную (высшую или низшую) передачу, блокировании / разблокировании гидротрансформатора или включении / выключении сцепления, изменении (увеличение или уменьшение) скоростного режима двигателя в переходных процессах, включении или выключении тормозной системы, управлении системой виброзащиты (например, активной подвеской). Исполнительных механизмов 24 может быть любое количество, зависящее от назначения и комплектации машины. Алгоритм управления может включать несколько программ. Например, одна программа управления может быть динамической, обеспечивающей максимальные тяговодинамические свойства автотранспортного средства, а вторая - экономическая, обеспечивающая экономию топлива. В предлагаемом способе для этих целей может дополнительно быть введена операция селекции программ (на схеме условно не показана). В зависимости от характера воздействия водителя на педаль акселератора (различная сила и темп нажатия, длительность, скорость и степень воздействия и т.д.) с помощью операции селекции осуществляется выбор либо динамической, либо экономической, либо еще какой-либо из заложенных в памяти процессора программ управления. Данный способ позволяет использовать множество различных программ, при этом они сформировываются с возможностью пополнять базу данных процессора и воздействовать на управляющий сигнал в режиме реального времени. 7 9142 1 2007.04.30 Для повышения свойств адаптивности алгоритма управления способ наделяется операциями 25 распознавания и обучения, заключающимися в возможности распознавания и запоминания различных ситуаций с автоматическим изменением характеристик управления в соответствии с изменением внешней среды и адекватно происходящим обстоятельствам. Для запоминания и идентификации (распознавания) различных ситуаций может использоваться, к примеру, теория нечетких множеств или технология, основанная на применении адаптивных нейро-нечетких сетей. Для этого характеристики различных ситуаций и всевозможные факторы (помехи движению, препятствия и т.д.) описываются функциями принадлежности и продукционными правилами, предписывающими системе осуществлять коррективы в управлении энергетическими режимами при возникновении нештатных и опасных ситуаций. Для улучшения алгоритма управления способ содержит операции 26 трансформации и адаптации базовых программ к реальным условиям движения машины. Эти операции могут выполняться совместно с операциями 25 распознавания и обучения с помощью процедур технологий нечеткой логики, искусственных нейронных сетей, генетических алгоритмов,ассоциативной памяти и (или) их комбинации и т.д. Предположим, мобильная машина содержит такие механизмы и системы, как двигатель, гидромеханическую передачу, тормозную систему и систему рулевого управления. В процессе функционирования способа осуществляются информационно-измерительные операции (фиг. 2), включающие операции сбора 1 информации, измерения 2, обработки 3 и анализа 4 информационных переменных, учитывающих характеристики внешней среды 5,ситуаций 6, управляющих воздействий водителя 7, механизмов машины, представленной двигателем 8, гидромеханической передачей 9, тормозной системой 10 и системой рулевого управления 11. Далее вначале выполняются информационно-измерительные операции, которые могут включать, например, процедуры преобразования 12 и селекции 13(отсеивания ложных) информационных сигналов, затем выполняются операции, включающие процедуры сортирования 14 и выбора 15 информационных переменных, позволяющие классифицировать и распознать основные (наиболее важные) и дополнительные(второстепенные) информационные переменные. Обработанные информационные пере менныенаправляются в интеллектуальный модуль, где над ними совершаются операции интеллектуального управления 16. Операции 16 включают операции 17 принятия решений, операции 18 формирования базовой программыВ и операции 19 формирования программ указанных операций формируется программа управления, после чего совершаются операции отработки сигналов управления 21, включающие процедуры управления 22 режимами двигателя, управления 23 гидромеханической передачей (переключение передач и блокирование гидротрансформатора), управления 24 тормозной системой и управления 25 рулевой системой. Функционирование интеллектуального управления энергетическими режимами мобильной машиной осуществляется в соответствии со следующим алгоритмом (фиг. 3). Для измерения и анализа информационных переменных используются датчики (см. фиг. 1) перемещений 27-29, угловой скорости вала двигателя 30, трансмиссионных элементов(турбинного колеса гидротрансформатора 31 и выходного 32 вала коробки передач), состояния фрикционов коробки передач 33 и муфты блокирования 34 гидротрансформатора,скорости автомобиля 35, давления 36 в подвесках системы виброзащиты, сканирования и визуализации 37 местности, характеристик макро- и микропрофиля дороги 38 (уклона, коэффициента сопротивления и т.д.) и др. Управляющие воздействия водителя фиксируются датчиками положения 27 и 28 педалей акселератора 5 и тормоза 6 и углового перемещения 29 рулевого колеса. 9142 1 2007.04.30 Датчики измеряют информационные переменные, характеризующие состояние механизмов и систем мобильной машины, параметры и характеристики внешней среды, особенности и характеристики управляющего воздействия водителя на органы управления(педали и рулевое колесо) а, т, р, т, д, вв, ,,,т , наж, Мд, Мт, Мвв и т.д. (а, т, ур перемещения педалей акселератора и тормоза и рулевого колеса,- скорость автомобиля,,,т - производные соответствующих параметров, д, т, вв, Мд, Мт, Мвв - угловые скорости и моменты вала двигателя, турбинного вала и выходного вала коробки передач,наж - время нажатия на педаль). При этом определяется состояние фрикционов переключения передач (Фпп), блокирования гидротрансформатора (Фбл), регистрируется номер включенной передачи п и признак блокирования гидротрансформатора бл (0 - гидротрансформатор разблокирован, 1 - заблокирован). Опрашиваемая датчиками информация поступает в блок анализа и обработки информации 1 (фиг. 3). В блок 1 стекается информация, характеризующая состояние механизмов 2 мобильной машины, управляющие воздействия 3 водителя, внешнюю среду 4 и различные ситуации 5. В блоке 1 осуществляется фиксация и регистрация множества информационных переменных а, т, р, т, д, вв, ,,,т , наж, Мд, Мт, Мвв и т.д. Эти переменные идентифицируются и обрабатываются, при этом каждая информационная переменная сравнивается с заложенными в базу знаний 6 значениями. Всевозможные ситуации, требования, ограничения и предписания, которыми должна руководствоваться система управления при движении машины, описаны вербальным или другим способом (например, посредством продукционных правил). В удобном для последующей обработки виде они хранятся в базе знаний 6 системы. С использованием выбранной технологии искусственного интеллекта на основе базы знаний и заложенного метода искусственного интеллекта в блоке 7 осуществляется вывод логического решения, на основе которого формируется базовая программа управления ,1,, где- число операций управления (ими служат операции управления переключением передач, блокированием гидротрансформатора, тормозной или и рулевой системой и т.д.). Базовая программа формируется в блоке 8 формирования базовой программы. Далее логические решения и базовая программа адаптируются к реальным условиям с учетом корректирующей программы(,т ,,т , , , ) и специального алгоритма, реализуемого в блоке 9. Число операций (подблоков) в блоке 9 может быть различным в зависимости от используемой в алгоритме технологии искусственного интеллекта. При наличии новой информации непрерывно осуществляется пополнение базы знаний 6 и производится обучение программы. Например, может быть запомнен индивидуальный стиль вождения, оттенки управляющих воздействий водителя на органы управления, характеристики маршрута движения и т.д. Обучение программы осуществляется в блоке 10 обучения, который может иметь несколько подблоков. Сформированные управляющие команды посылаются на блоки отработки сигналов управления исполнительными механизмами 11-16 блок 11 - исполнительный механизм переключения передач, блок 12 - исполнительный механизм блокирования гидротрансформатора, блок 13 - исполнительный механизм управления режимами двигателя, блок 14 исполнительный механизм системы виброзащиты, блок 15 - исполнительный механизм управления тормозной системой, блок 16 - исполнительный механизм рулевого управления. При необходимости могут быть предусмотрены дополнительные блоки, предназначенные для управления другими механизмами и подсистемами машины. Интеллектуальный интерфейс расположен в блоке 17, который предназначен для организации связи между остальными блоками и водителем машины. Формирование управляющих команд осуществляется следующим образом. 9142 1 2007.04.30 При движении на тяговом режиме оценивается текущее значение угловой скорости выходного вала коробки передач вв и сравнивается с пороговыми значениями вв, вв,ввб и ввр, характеризующими моменты переключения на высшую и низшую передачи,блокирования и разблокирования гидротрансформатора соответственно. В зависимости от значения вв формируется команда исполнительным устройствам на соответствующее управление трансмиссией и двигателем. При переключении на высшие передачи скоростной режим двигателя изменяется (уменьшается) на величинупутем изменения положения органа управления подачей топлива в двигатель. Если вв находится в оптимальной области, ограниченной пороговыми значениями, то управление не производится, и номер передачи остается прежним. Во время переходных процессов, вызванных переключениями передач, предписывается запрет отработки всех сигналов управления в течение нескольких (как правило, двух-трех) секунд. Управление фрикционами переключения передач осуществляется в подблоках блока 11 переключения передач (они на рисунке условно не показаны). Для этого разрабатывают специальные алгоритмы, зависящие от типа трансмиссии. В системах управления переключением передач без разрыва потока мощности положение органа управления подачей топлива в двигатель в процессе переключений остается неизменным. Качество переходных процессов при переключениях передач в этом случае обеспечивается путем управления временными интервалами срабатывания исполнительных механизмов включаемого и выключаемого фрикционов. Плавность движения машины также существенно зависит от организации процесса включения фрикционов коробки передач при переключениях передач. Этот процесс определяется характеристикой нарастания давления в исполнительном цилиндре фрикциона,которая формируется на основе соответствующего алгоритма и реализуется логическими и исполнительными элементами. Применяются два способа регулирования давления посредством клапанов плавного включения или с использованием механизмов пропорционального управления. Предпочтительны и перспективны последние. В механизмах пропорционального управления исполнительные элементы представляют собой электромагнитные клапаны с пропорциональными электромагнитами. Управление этими клапанами осуществляется посредством широтно-импульсной модуляции управляющего сигнала. Усилие пропорционального электромагнита зависит от скважности сигнала управления,формирование которого осуществляется посредством специальных устройств. 1. Система автоматического управления гидромеханической трансмиссией. Патент РБ 5522 по заявке а 20000132 от 2000.02.14. 2. Рынкевич С.А. Интеллектуальная система управления большегрузным автомобилем // Грузовик. - 2001. -5. - С. 2-3. 3. Тарасик В.П. Проблемы создания интеллектуальных систем управления автотранспортными средствами / В.П. Тарасик, С.А. Рынкевич // Весц НАН Беларус. Сер. фз.-тэхн. навук. 2001. -3. - С. 37-51. 4. Ксеневич И.П., Тарасик В.П. Теория и проектирование автоматических систем. - М. Машиностроение, 1996. - 480 с. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B60K 41/00
Метки: машины, энергетическими, режимами, мобильной, управления, способ, интеллектуального
Код ссылки
<a href="https://by.patents.su/11-9142-sposob-intellektualnogo-upravleniya-energeticheskimi-rezhimami-mobilnojj-mashiny.html" rel="bookmark" title="База патентов Беларуси">Способ интеллектуального управления энергетическими режимами мобильной машины</a>
Система адаптивного интеллектуального управления энергетическими режимами мобильной машины

Номер патента: U 3421
Опубликовано: 30.04.2007
Авторы: Коробкин Владимир Андреевич, Тарасик Владимир Петрович, Рынкевич Сергей Анатольевич, Андрияненко Юрий Анатольевич
МПК: B65K 41/00
Метки: управления, система, энергетическими, машины, мобильной, интеллектуального, адаптивного, режимами
Текст:
...двигателем 1, трансмиссией 2, включающей гидротрансформатор с коробкой передач (не показаны), и тормозной системой 3, которая эксплуатируется в условиях внешней среды 4. Для измерения информационных параметров характеристик управляющих воздействий водителя, энергетических режимов мобильной машины и внешней среды установлены датчики угловой скорости двигателя 5, трансмиссионных элементов (турбинного колеса гидротрансформатора и выходного...
Способ интеллектуального управления энергетическими режимами автотранспортного средства и система для его реализации

Номер патента: 8007
Опубликовано: 30.04.2006
Автор: Рынкевич Сергей Анатольевич
МПК: F16H 61/02, B60K 41/06
Метки: способ, режимами, реализации, энергетическими, автотранспортного, средства, система, управления, интеллектуального
Текст:
...интеллектуального контроллера на основе нечеткой логики или с использованием других технологий искусственного интеллекта. Контроллер имеет блок ввода и интерпретации информационных сигналов, блок базы данных и правил, логический блок, блок вывода решений и блок формирования управляющих сигналов, при этом входы блока ввода и интерпретации информационных сигналов связаны с датчиками положения педалей акселератора и тормоза, угловых скоростей...
Способ адаптивного управления энергетическими режимами автотранспортного средства
Номер патента: 7276
Опубликовано: 30.09.2005
Авторы: Тарасик Владимир Петрович, Рынкевич Сергей Анатольевич
МПК: B60K 41/06
Метки: энергетическими, управления, адаптивного, средства, способ, автотранспортного, режимами
Текст:
...движению автотранспортного средства, обусловленных внешней средой и объектами транспортного потока нештатных и опасных дорожных ситуаций реакций автотранспортного средства на управляющие воздействия параметров скоростных режимов движения автотранспортного средства особенностей управления автотранспортным средством, обусловленных стилем, навыками вождения и квалификацией водителя уровня загрузки автотранспортного средства допустимых...
Способ адаптивного управления энергетическими режимами автотранспортного средства
Номер патента: 7330
Опубликовано: 30.09.2005
Авторы: Рынкевич Сергей Анатольевич, Тарасик Владимир Петрович
МПК: B60K 41/06
Метки: средства, управления, режимами, автотранспортного, способ, адаптивного, энергетическими
Текст:
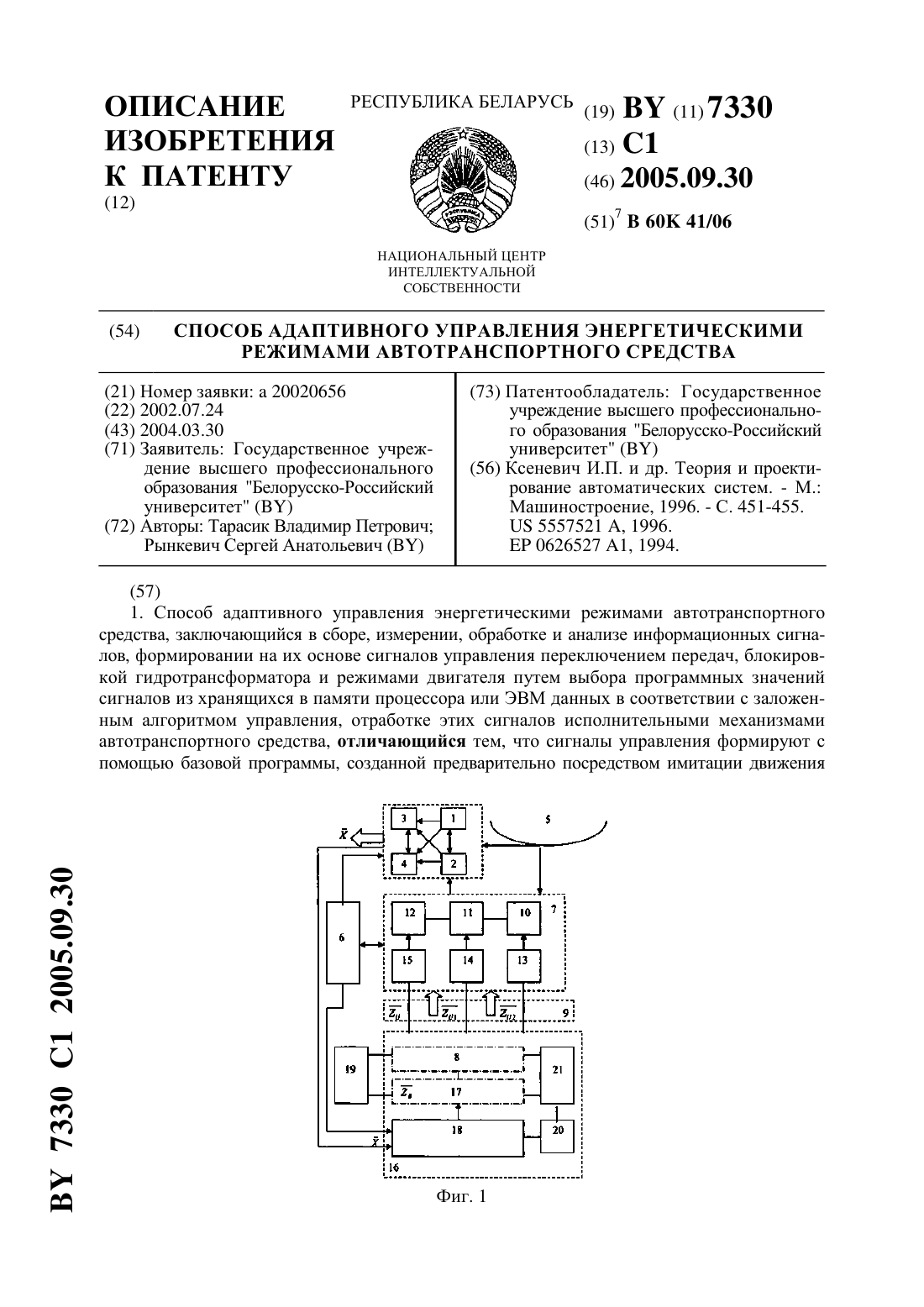
...зависимостей параметров характеристик базовой программы управле 4 7330 1 2005.09.30 ния от параметров автомобиля, внешней среды и управляющих воздействий водителя корреляционный анализ зависимостей параметров характеристик базовой программы от параметров автомобиля, внешней среды и управляющих воздействий водителя и выбор дополнительных информационных переменных, необходимых для адаптации базовой программы регрессионный анализ результатов...
Автоматическая трансмиссия мобильной машины
Номер патента: U 2750
Опубликовано: 30.06.2006
Автор: Пузанова Ольга Владимировна
МПК: B60K 41/28
Метки: мобильной, машины, автоматическая, трансмиссия
Текст:
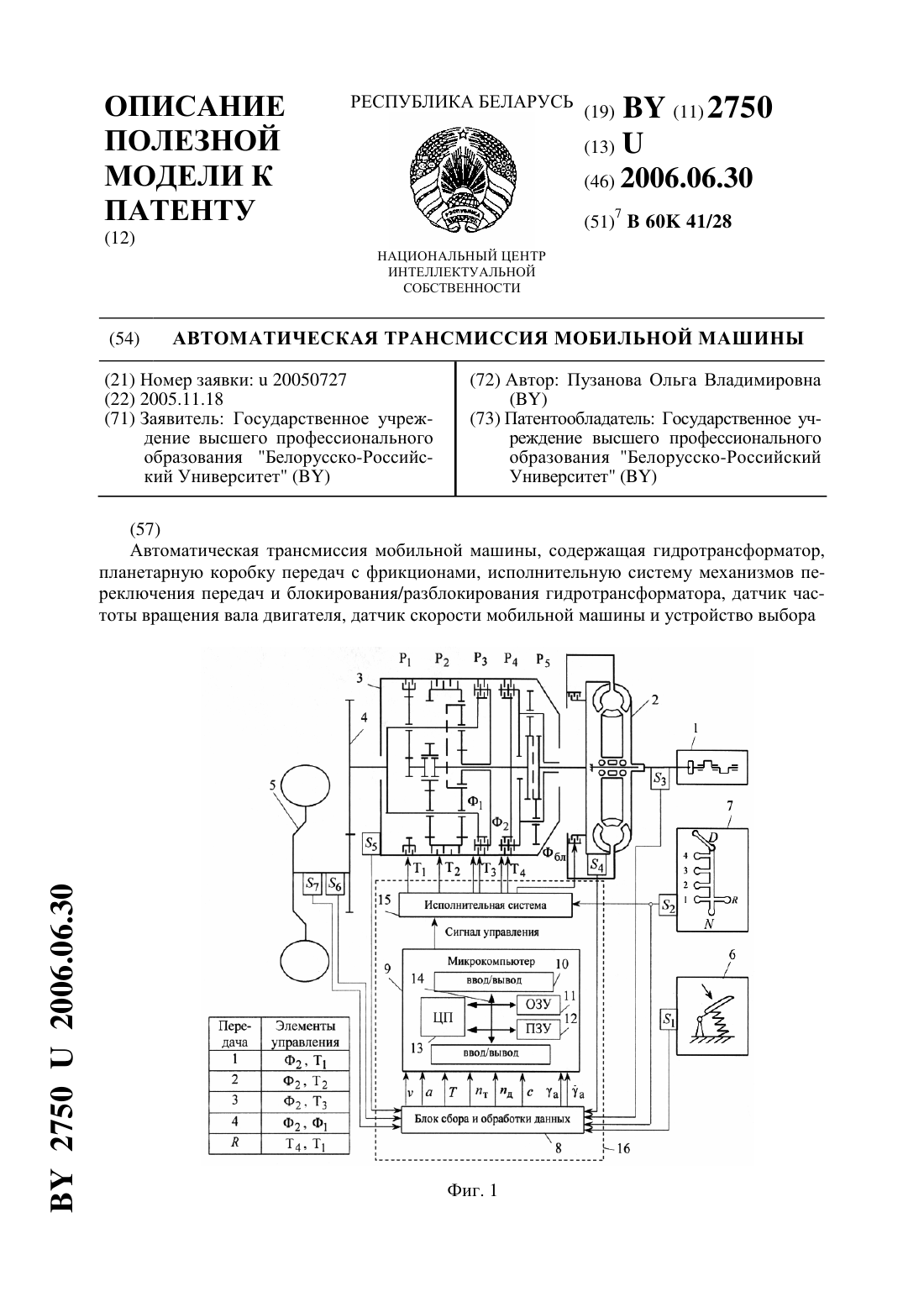
...вращения турбинного колеса гидротрансформаторадатчик 5 - температуры масла гидромеханической трансмиссии Т датчик 6 - скоростимобильной машины датчик 7 - ускорения а мобильной машины. Все датчики соединены с блоком сбора и обработки данных 8, а датчик 2 соединен дополнительной связью с исполнительной системой 15. Микрокомпьютер 9, расположенный между блоком сбора и обработки данных 8 и исполнительной системой 15, включает устройство...
Предыдущий патент: Устройство для сложения
Следующий патент: Конденсатор для интегральных микросхем
Случайный патент: Стенд для исследования взаимодействия гусеничных ходовых систем с почвой